
A Safety Reinforced Cooperative Adaptive Cruise Control Strategy Accounting for Dynamic Vehicle-to-Vehicle Communication Failure



Abstract
:1. Introduction
2. Preliminaries
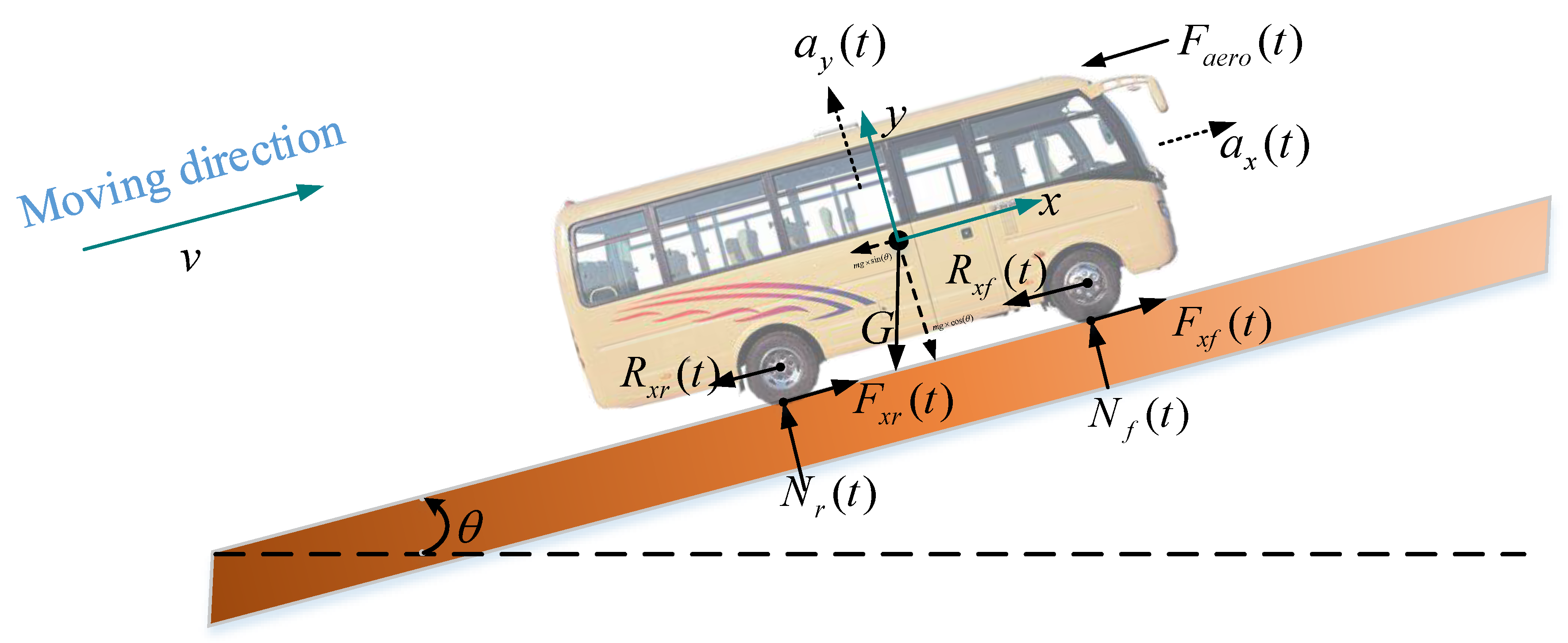
2.1. Vehicle Dynamics Model
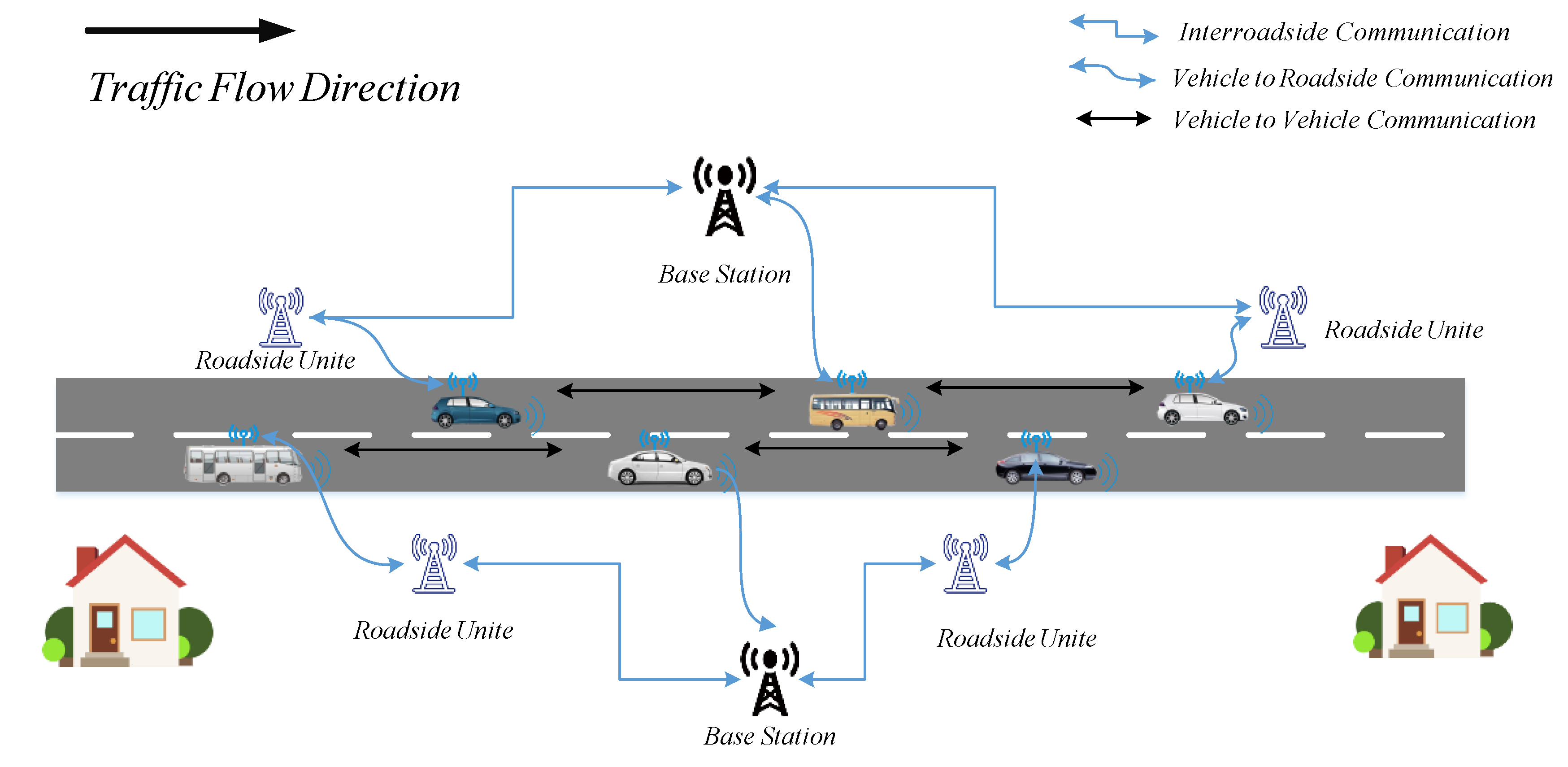
2.2. Cooperative Adaptive Cruise Platoon Control
2.3. Adaptive Cruise Platoon Control Strategy
3. Safety Reinforced CACC Strategy
3.1. Safety Reinforced CACC Control Structure
| Algorithm 1 the SR-CACC algorithm |
| Input: The length of simulation time T; the length of each step in the simulation ts; the number of vehicles in the platoon N; the leading vehicle driving profiles ; Output:); 1: Initialize: (·|k); 2: for k = 1→ T/ts do 3: Detect the communication status CS = Ture or False, Whether the communication status has changed, 4: Determine whether to excute the smooth transition module, and switch the control algorithm; 5: If CS = Ture 6: ; Calculate (·|k + 1); 7: ) it to the neighbor vehicle; 8: else 9: (·|k + 1); 10: end if 11: end for 12: ) |
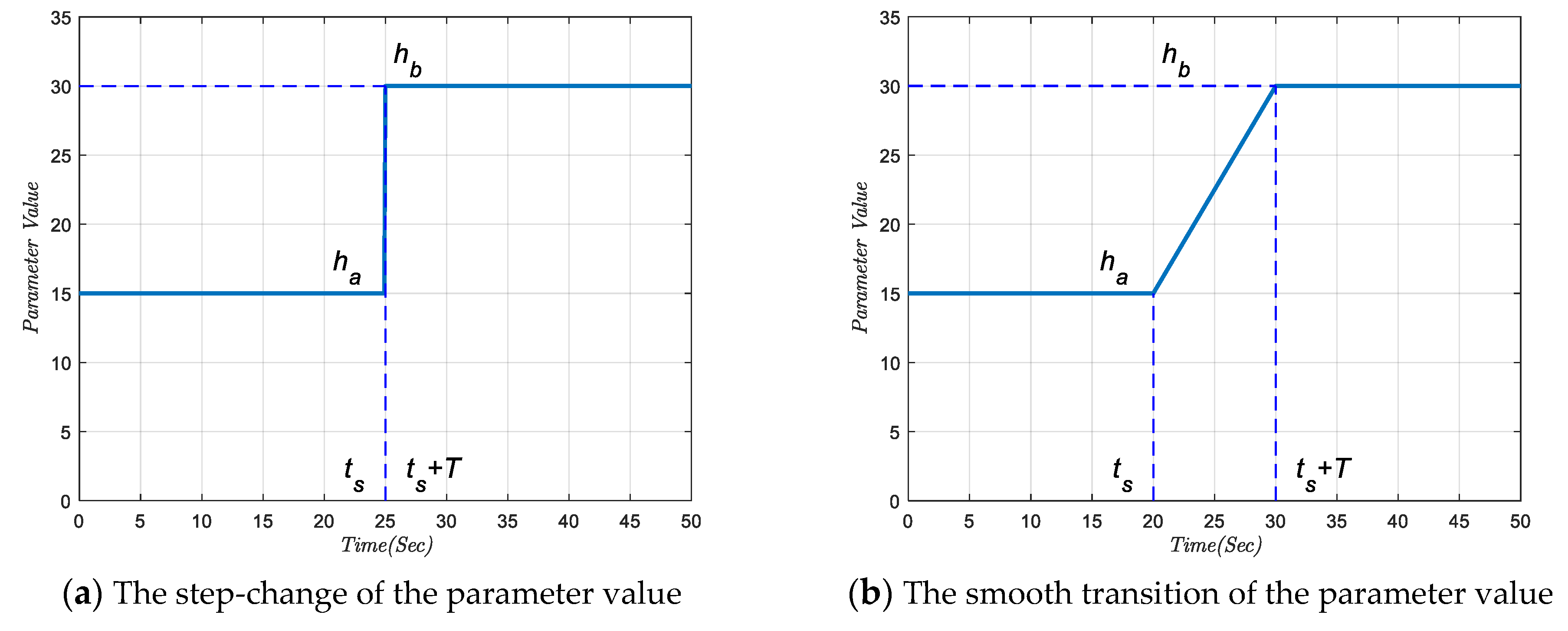
3.2. Smooth Transition Algorithm
4. Experiment and Simulation Results
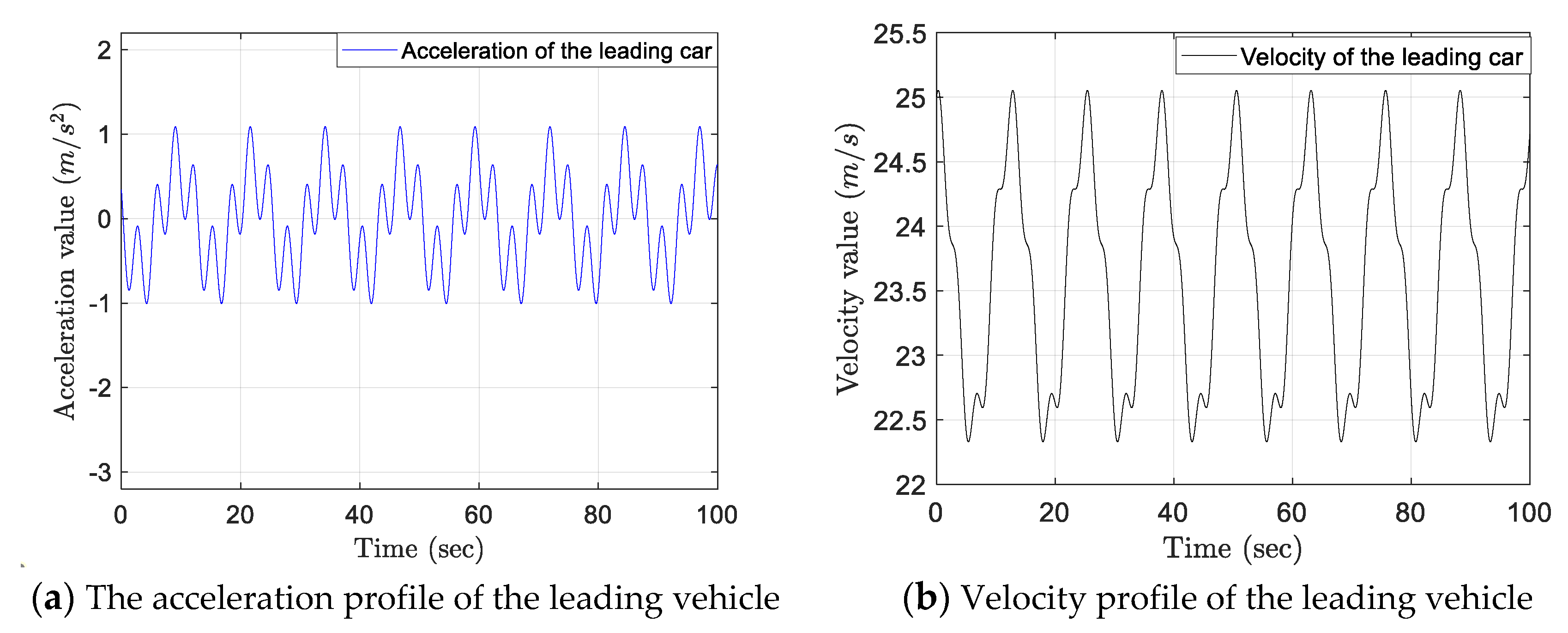
4.1. Design of the Simulation Experiment
4.2. Simulation Experiment without the Smooth Transition
4.3. Simulation Experiment with the Smooth Transition
4.4. Discussion of the Experiment Results
5. Conclusion and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- World Health Organization. Global Status Report on Road Safety 2018: Supporting a Decade of Action, Book Global Status Report on Road Safety 2018: Supporting a Decade of Action, Series Global Status Report on Road Safety 2018: Supporting a Decade of Action; World Health Organization: Geneva, Switzerland, 2020. [Google Scholar]
- Lee, D.; Yeo, H. Real-Time Rear-End Collision-Warning System Using a Multilayer Perceptron Neural Network. IEEE Trans. Intell. Transp. Syst. 2016, 17, 3087–3097. [Google Scholar] [CrossRef]
- Mukhtar, A.; Xia, L.; Tang, T.B. Vehicle Detection Techniques for Collision Avoidance Systems: A Review. IEEE Trans. Intell. Transp. Syst. 2015, 16, 2318–2338. [Google Scholar] [CrossRef]
- Peden, M. World Report on Road Traffic Injury Prevention; World Health Organization: Geneva, Switzerland, 2004. [Google Scholar]
- World Health Organization. Decade of Action for Road Safety 2011–2020: Global Launch, Book Decade of Action for Road Safety 2011–2020: Global Launch, Series Decade of Action for Road Safety 2011–2020: Global Launch; World Health Organization: Geneva, Switzerland, 2020. [Google Scholar]
- Tu, Y.; Wang, W.; Li, Y.; Xu, C.; Xu, T.; Li, X. Longitudinal safety impacts of cooperative adaptive cruise control vehicle’s degradation. J. Saf. Res. 2019, 69, 177–192. [Google Scholar] [CrossRef] [PubMed]
- Rolison, J.J.; Regev, S.; Moutari, S.; Feeney, A. What are the factors that contribute to road accidents? An assessment of law enforcement views, ordinary drivers’ opinions, and road accident records. Accid. Anal. Prev. 2018, 115, 11–24. [Google Scholar] [CrossRef] [PubMed]
- Eskandarian, A.; Wu, C.; Sun, C. Research Advances and Challenges of Autonomous and Connected Ground Vehicles. IEEE Trans. Intell. Transp. Syst. 2019, 22, 683–711. [Google Scholar] [CrossRef]
- Mahdinia, I.; Arvin, R.; Khattak, A.J.; Ghiasi, A. Safety, Energy, and Emissions Impacts of Adaptive Cruise Control and Cooperative Adaptive Cruise Control. Transp. Res. Rec. J. Transp. Res. Board 2020, 2674, 253–267. [Google Scholar] [CrossRef]
- Liu, Y.; Wang, W.; Hua, X.; Wang, S. Safety Analysis of a Modified Cooperative Adaptive Cruise Control Algorithm Accounting for Communication Delay. Sustainability 2020, 12, 7568. [Google Scholar] [CrossRef]
- Wang, J.; Liu, J.; Kato, N. Networking and Communications in Autonomous Driving: A Survey. IEEE Commun. Surv. Tutor. 2018, 21, 1243–1274. [Google Scholar] [CrossRef]
- Shepardson, D. Tesla’s Autopilot System Was Engaged during Fatal Crash, NTSB Says, Book Tesla’s Autopilot System Was Engaged during Fatal Crash, NTSB Says, Series Tesla’s Autopilot System Was Engaged during Fatal Crash, NTSB Says; Reuters: South Jordan, UT, USA, 2020. [Google Scholar]
- Efrati, B.A. Uber Finds Deadly Accident Likely Caused by Software Set to Ignore Objects on Road, Book Uber Finds Deadly Accident Likely Caused by Software Set to Ignore Objects on Road, Series Uber Finds Deadly Accident Likely Caused by Software Set to Ignore Objects on Road; Amir Efrati: Boston, MA, USA, 2018. [Google Scholar]
- Zhao, C.; Duan, X.; Cai, L.; Cheng, P. Vehicle Platooning with Non-Ideal Communication Networks. IEEE Trans. Veh. Technol. 2020, 70, 18–32. [Google Scholar] [CrossRef]
- Yao, Z.; Jiang, H.; Cheng, Y.; Jiang, Y.; Ran, B. Integrated Schedule and Trajectory Optimization for Connected Automated Vehicles in a Conflict Zone. IEEE Trans. Intell. Transp. Syst. 2020, 1–11. [Google Scholar] [CrossRef]
- Milanés, V.; Shladover, S.E. Modeling cooperative and autonomous adaptive cruise control dynamic responses using experimental data. Transp. Res. Part C Emerg. Technol. 2014, 48, 285–300. [Google Scholar] [CrossRef] [Green Version]
- Yang, X.; Liu, L.; Vaidya, N.H.; Zhao, F. A vehicle-to-vehicle communication protocol for cooperative collision warning. In Proceedings of the First Annual International Conference on Mobile and Ubiquitous Systems: Networking and Services, MOBIQUITOUS 2004, Boston, MA, USA, 26 August 2004; pp. 114–123. [Google Scholar]
- Jarašūnienė, A.; Jakubauskas, G. Improvement of road safety using passive and active intelligent vehicle safety systems. Transport 2007, 22, 284–289. [Google Scholar] [CrossRef] [Green Version]
- Zheng, Y.; Li, S.; Wang, J.; Cao, D.; Li, K. Stability and Scalability of Homogeneous Vehicular Platoon: Study on the Influence of Information Flow Topologies. IEEE Trans. Intell. Transp. Syst. 2015, 17, 14–26. [Google Scholar] [CrossRef] [Green Version]
- Rajamani, R. Vehicle Dynamics And Control (Mechanical Engineering Series); Springer: Berlin/Heidelberg, Germany, 2011. [Google Scholar]
- Wang, M. Infrastructure assisted adaptive driving to stabilise heterogeneous vehicle strings. Transp. Res. Part C Emerg. Technol. 2018, 91, 276–295. [Google Scholar] [CrossRef] [Green Version]
- Corser, G.P.; Arenas, A.; Fu, H. Effect on Vehicle Safety of Nonexistent or Silenced Basic Safety Messages. In Proceedings of the 2016 International Conference on Computing, Networking and Communications (ICNC), Kauai, HI, USA, 15–18 February 2016. [Google Scholar]
- Baek, M.; Lee, H.; Choi, H.; Ko, K. Poster: Development of ICA Algorithm for V2X Communications by Using PreScan. In Proceedings of the IEEE Vehicular Networking Conference, Kyoto, Japan, 16–18 December 2015; pp. 167–168. [Google Scholar]
- Farias, P.V.G.; Lima, T.A.; Bordim, J.L. Mitigating message dissemination issues in safety applications for vehicular ad hoc networks. Concurr. Comput. Pract. Exp. 2020, e6034. [Google Scholar] [CrossRef]
- Zhang, Y.; Bai, Y.; Hu, J.; Wang, M. Control Design, Stability Analysis, and Traffic Flow Implications for Cooperative Adaptive Cruise Control Systems with Compensation of Communication Delay. Transp. Res. Rec. J. Transp. Res. Board 2020, 2674, 638–652. [Google Scholar] [CrossRef]
- Tian, B.; Deng, X.; Xu, Z.; Zhang, Y.; Zhao, X. Modeling and Numerical Analysis on Communication Delay Boundary for CACC String Stability. IEEE Access 2019, 7, 168870–168884. [Google Scholar] [CrossRef]
- Kesting, A.; Treiber, M.; Helbing, D. Enhanced intelligent driver model to access the impact of driving strategies on traffic capacity. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2010, 368, 4585–4605. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ploeg, J.J.; Van De Wouw, N.N.; Nijmeijer, H.H. Lp String Stability of Cascaded Systems: Application to Vehicle Platooning. IEEE Trans. Control Syst. Technol. 2013, 22, 786–793. [Google Scholar] [CrossRef] [Green Version]
- Milanes, V.; Villagra, J.; Perez, J.; Gonzalez, C. Low-Speed Longitudinal Controllers for Mass-Produced Cars: A Comparative Study. IEEE Trans. Ind. Electron. 2012, 59, 620–628. [Google Scholar] [CrossRef]
- S.I.O. Standardization. Intelligent Transport Systems–Adaptive Cruise Control Systems–Performance Requirements and Test Procedures; S.I.O. Standardization: Geneva, Switzerland, 2010. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Definition | Unit | Example Value |
|---|---|---|---|
| Mass of the vehicle | (kg) | 1555 | |
| Gravitational constant | () | 9.81 | |
| Air density | () | 1.20 | |
| Aerodynamic drag coefficient | - | 0.335 | |
| AF | The frontal area of the vehicle | () | 2.3 |
| Symbol | Definition | Value |
|---|---|---|
| Gains of the acceleration | 0.6 | |
| Gains of the speed errors | 0.4 | |
| Gains of the distance errors | 0.2 | |
| The headway time gap (s) | 0.6 | |
| Communication time delay (ms) | 100 |
| Symbol | Definition | Value |
|---|---|---|
| Gains of the speed errors | 0.8 | |
| Gains of the distance errors | 0.6 | |
| The headway time gap (s) | 1.2 | |
| Sensor delay and actuator lag (ms) | 200 |
| Vehicles Type | Mass (kg) | Length (m) | Frontal Area (m2) |
|---|---|---|---|
| Car | [1500, 3000] | [3, 4.5] | [1.8, 2.4] |
| Truck | [4000, 8000] | [4.5, 8] | [2.6, 4.5] |
| Bus | [3500, 5000] | [4, 6] | [2.4, 4.2] |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Y.; Wang, W. A Safety Reinforced Cooperative Adaptive Cruise Control Strategy Accounting for Dynamic Vehicle-to-Vehicle Communication Failure. Sensors 2021, 21, 6158. https://doi.org/10.3390/s21186158
Liu Y, Wang W. A Safety Reinforced Cooperative Adaptive Cruise Control Strategy Accounting for Dynamic Vehicle-to-Vehicle Communication Failure. Sensors. 2021; 21(18):6158. https://doi.org/10.3390/s21186158
Chicago/Turabian StyleLiu, Yi, and Wei Wang. 2021. "A Safety Reinforced Cooperative Adaptive Cruise Control Strategy Accounting for Dynamic Vehicle-to-Vehicle Communication Failure" Sensors 21, no. 18: 6158. https://doi.org/10.3390/s21186158
APA StyleLiu, Y., & Wang, W. (2021). A Safety Reinforced Cooperative Adaptive Cruise Control Strategy Accounting for Dynamic Vehicle-to-Vehicle Communication Failure. Sensors, 21(18), 6158. https://doi.org/10.3390/s21186158