
Space-Filling Curve Resistor on Ultra-Thin Polyetherimide Foil for Strain Impervious Temperature Sensing

 , ,
, ,  , , and
, , and 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
2.1. Micro Fabrication
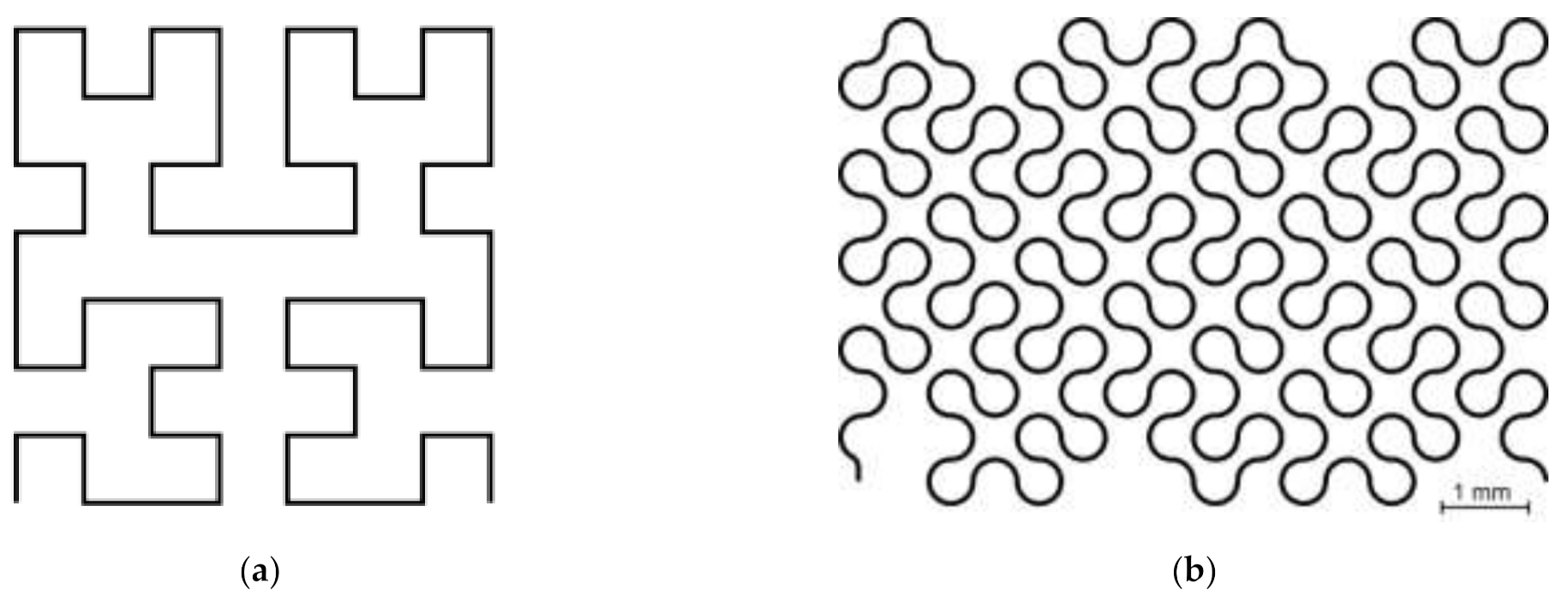
2.2. Design of the Temperature Sensor as Part of a Multiple Sensor Node
2.3. Simulation Methodology
2.4. Setups and Procedures for the Experiments
3. Results and Discussion
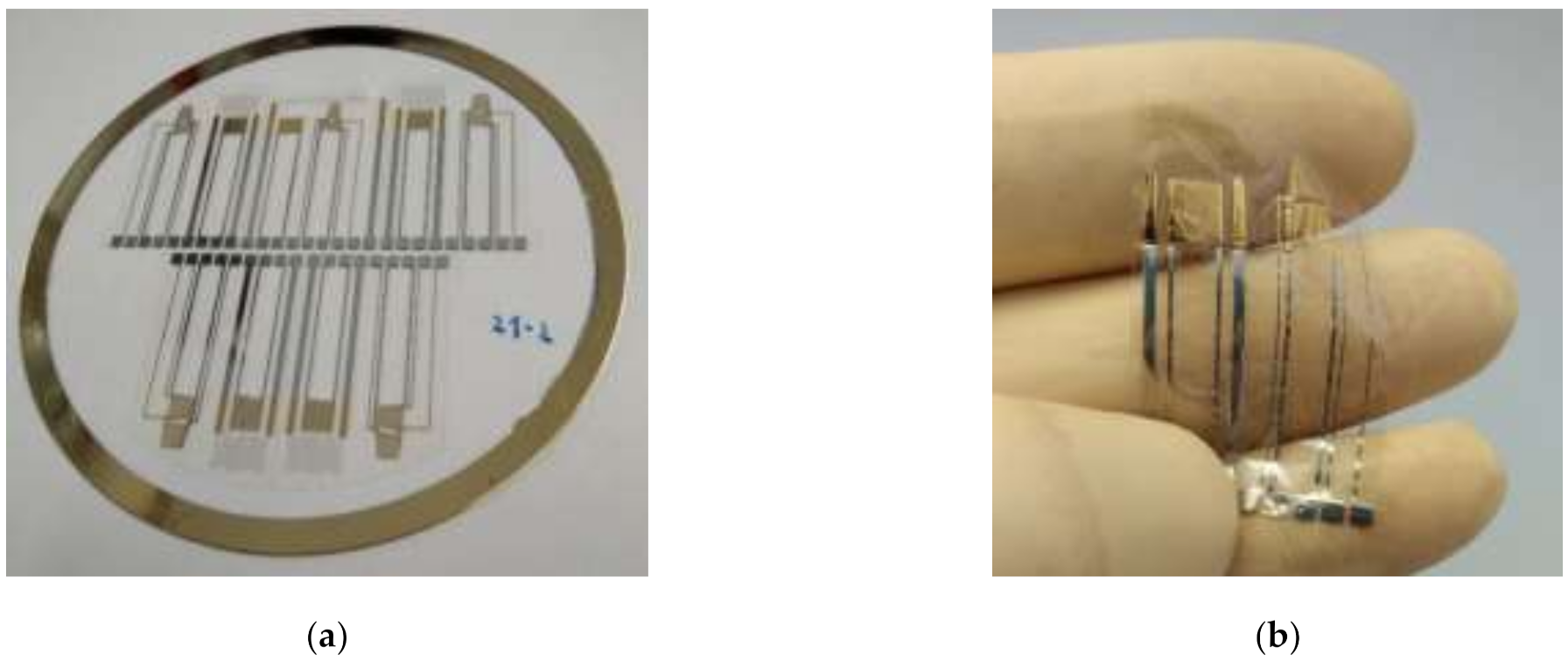
3.1. Fabrication
3.2. Simulation of Strain-Induced Resistance Change
3.3. Calibration of the SFC Sensor
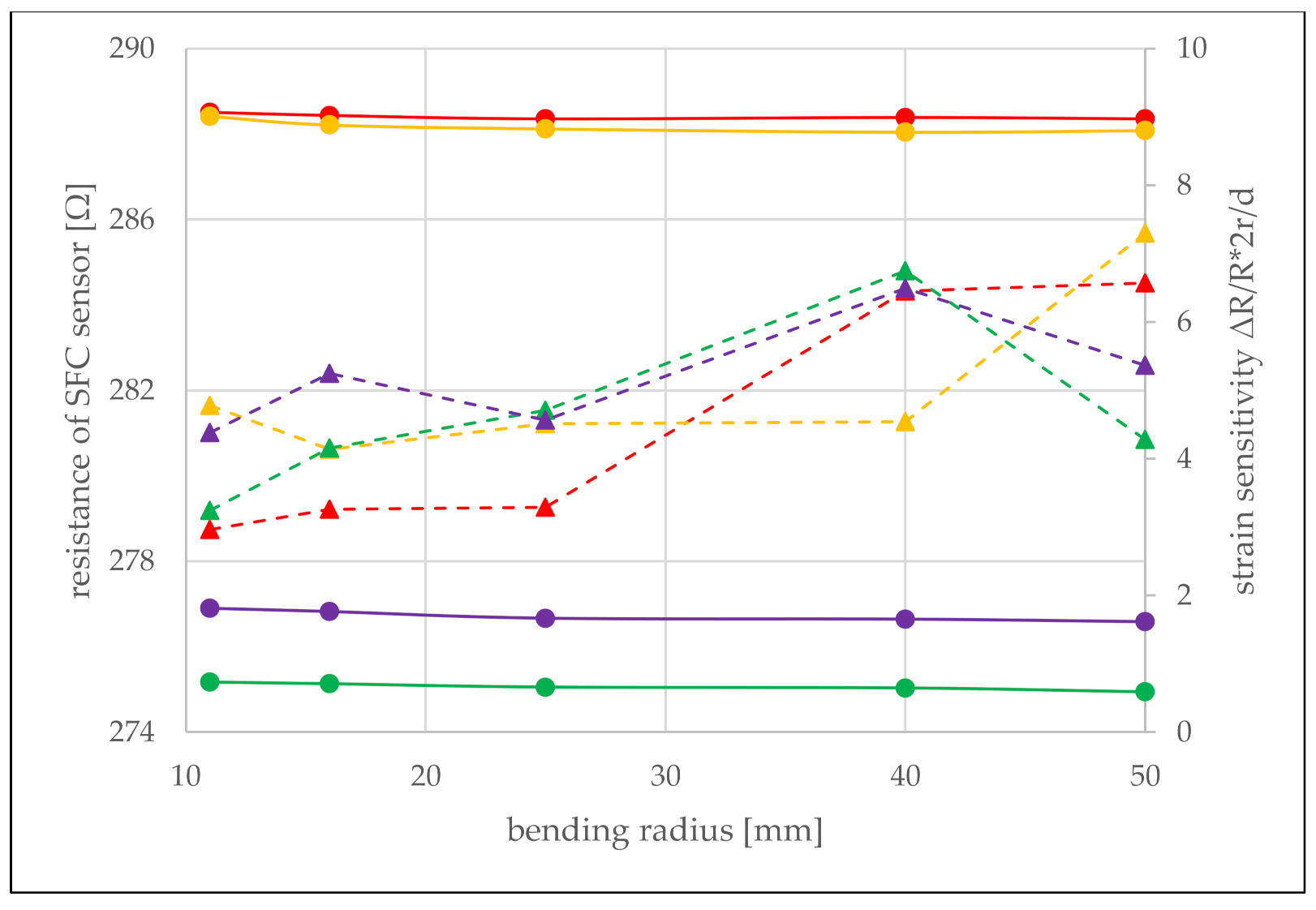
3.4. Bending Sensitivity
3.5. Temperature Measurement under the Influence of Strain
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| FEM | Finite element method |
| PTC | Positive temperature coefficient |
| NTC | Negative temperature coefficient |
| PI | Polyimide |
| PVDF | Polyvinylidene fluoride |
| PEI | Polyetherimide |
| CFRP | Carbon fiber-reinforced polymers |
| UV | Ultraviolet |
| SFC | Space-filling curve |
References
- Tian, B.; Liu, Q.; Luo, C.; Feng, Y.; Wu, W. Multifunctional Ultrastretchable Printed Soft Electronic Devices for Wearable Applications. Adv. Electron. Mater. 2020, 6, 1900922. [Google Scholar] [CrossRef]
- Hassan, G.; Bae, J.; Hassan, A.; Ali, S.; Hyun Lee, C.; Choi, Y. Ink-jet Printed Stretchable Strain Sensor Based on Graphene/ZnO Composite on Micro-random Ridged PDMS Substrate. Compos. Part A 2018, 107, 519–528. [Google Scholar] [CrossRef]
- von der Heide, C.; Grein, M.; Dietzel, A. Femtosecond laser-contoured micro-strain gages. Microelectron. Eng. 2019, 214, 81–86. [Google Scholar] [CrossRef]
- Estevam Schmiedt, R.; Qian, C.; Behr, C.; Hecht, L.; Dietzel, A. Flexible sensors on polymide fabricated by femtosecond laser for integration in fiber reinforced polymers. Flex. Print. Electron 2018, 3, 025003. [Google Scholar] [CrossRef]
- Koch, E.; Dietzel, A. Skin attachable flexible sensor array for respiratory monitoring. Sens. Actuators A Phys. 2016, 250, 138–144. [Google Scholar] [CrossRef]
- von der Heide, C.; Steinmetz, J.; Schollerer, M.J.; Hühne, C.; Sinapius, M.; Dietzel, A. Smart Inlays for Simultaneous Crack Sensing and Arrest in Multifunctional Bondlines of Composites. Sensors 2021, 21, 3852. [Google Scholar] [CrossRef] [PubMed]
- Nau, M. Elektrische Temperaturmessung; Jumo GmbH & Co. KG: Fulda, Germany, 2004; ISBN 13: 978-3-935742-06-1. [Google Scholar]
- Moser, Y.; Gils, M.A.M. Miniaturized Flexible Temperature Sensor. J. Microelectromechanical Syst. 2007, 16, 1349–1354. [Google Scholar] [CrossRef]
- Schwerter, M.; Beutel, T.; Leester-Schädel, M.; Büttgenbach, S.; Dietzel, A. Flexible hot-film anemometer arrays on curved structures for active flow control on airplane wings. Microsyst. Technol. 2014, 20, 821–829. [Google Scholar] [CrossRef]
- Kyriazis, A.; Kilian, R.; Sinapius, M.; Rager, K.; Dietzel, A. Tensile Strength and Structure of the Interface between a Room-Curing Epoxy Resin and Thermoplastic Films for the Purpose of Sensor Integration. Polymers 2021, 13, 330. [Google Scholar] [CrossRef] [PubMed]
- Yu, C.; Wang, Z.; Yu, H.; Jiang, H. A stretchable temperature sensor based on elastically buckled thin film devices on elastomeric substrates. Appl. Phys. Lett. 2009, 95, 141912. [Google Scholar] [CrossRef] [Green Version]
- Lichtenwalner, D.J.; Hydrick, A.E.; Kingon, A.I. Flexible thin film temperature and strain sensor array utilizing a novel sensing concept. Sens. Actuators A Phys. 2007, 135, 593–597. [Google Scholar] [CrossRef]
- Ahn, C.H.; Park, H.W.; Kim, H.H.; Park, S.H.; Son, C.; Kim, M.C.; Lee, J.H.; Go, J.S. Direct fabrication of thin film gold resistance temperature detection sensors on a curved surface using a flexible dry film photoresist and their calibration up to 450 °C. J. Micromech. Microeng. 2013, 23, 065031. [Google Scholar] [CrossRef]
- Bungard Elektronik. SUR-TIN Chem. Verzinnung, Arbeitsanleitung; Bungard Elektronik GmbH & Co. KG: Windeck, Germany, 2001. [Google Scholar]
- Jagadish, H.V. Analysis of the Hilbert curve for representing two-dimensional space. Inf. Process. Lett. 1997, 62, 17–22. [Google Scholar] [CrossRef]
- Keil, S. Dehnungsmessstreifen, 2nd ed.; Springer Vieweg: Wiesbaden, Germany, 2017. [Google Scholar] [CrossRef]
- Kyriazis, A.; Asali, K.; Sinapius, M.; Rager, K.; Dietzel, A. Adhesion of Multifunctional Substrates for Integrated Cure Monitoring Film Sensors to Carbon Fiber Reinforced Polymers. J. Compos. Sci. 2020, 4, 138. [Google Scholar] [CrossRef]
- Kyriazis, A.; Feder, J.; Rager, K.; von der Heide, C.; Dietzel, A.; Sinapius, M. Reducing the weakening effect in fibre reinforced polymers caused by integrated film sensors. J. Compos. Sci. 2021, 5, 256. [Google Scholar] [CrossRef]





Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rager, K.; Jaworski, D.; von der Heide, C.; Kyriazis, A.; Sinapius, M.; Constantinou, I.; Dietzel, A. Space-Filling Curve Resistor on Ultra-Thin Polyetherimide Foil for Strain Impervious Temperature Sensing. Sensors 2021, 21, 6479. https://doi.org/10.3390/s21196479
Rager K, Jaworski D, von der Heide C, Kyriazis A, Sinapius M, Constantinou I, Dietzel A. Space-Filling Curve Resistor on Ultra-Thin Polyetherimide Foil for Strain Impervious Temperature Sensing. Sensors. 2021; 21(19):6479. https://doi.org/10.3390/s21196479
Chicago/Turabian StyleRager, Korbinian, David Jaworski, Chresten von der Heide, Alexander Kyriazis, Michael Sinapius, Iordania Constantinou, and Andreas Dietzel. 2021. "Space-Filling Curve Resistor on Ultra-Thin Polyetherimide Foil for Strain Impervious Temperature Sensing" Sensors 21, no. 19: 6479. https://doi.org/10.3390/s21196479