1. Introduction
A regional classification map of crops type provides an important basis for estimating the areal coverage, monitoring the growth, and forecasting various crop yields. Timely availability of accurate information regarding the spatial distribution of crop types plays a very important role in scheduling agricultural management policies, ensuring national food security, and evaluating ecological function [
1,
2]. Satellite-based remote-sensing techniques have proven very effective for mapping crops owing to their advantages of wide spatial coverage, periodic observation, high efficiency, and low cost [
3,
4,
5]. Optical imagery such as that acquired by the Landsat-8, Sentinel-2, and Gaofen-1 satellites has become the main data source for classifying crop types and determining their spatial distribution [
6].
The Hebei plain, covering an area of 81,600 km
2, is an important grain and cotton-producing region in China [
7]. Cultivated land is a predominant land use type and dryland crops, such as maize and cotton, have been widely planted in Hebei plain for a long time. Affected by the monsoon climate of medium latitudes, 80% of average annual precipitation falls in this region during July–September, which just covers the main growing periods of maize and cotton [
8]. Unfortunately, the availability and quality of optical remotely sensed imagery covering this region are often very poor, owing to the cloudy/rainy weather that occur frequently during the critical phenological stages of this two typical dryland crops in Hebei plain [
9]. Consequently, optical remote-sensing techniques are inadequate for accurate and timely monitoring of these crops.
As an active microwave remote-sensing technology, the synthetic aperture radar (SAR) has 24-h all-weather observation capability, making it a promising tool for crop monitoring in regions that experience frequent cloud cover. Restricted by sensor techniques, early studies that used SAR remote sensing to extract crop-related information involved single-polarization (e.g., HH or VV (horizontal or vertical co-polarization)) data that were commonly acquired by satellite-based orbital radar systems, e.g., ERS-1 (the first European Remote Sensing Satellite), ERS-2 (the second European Remote Sensing Satellite), JERS-1 (Japanese Earth Resources Satellite 1), and RADARSAT-1 [
1]. As an important feature, the backscattering coefficient (σ
0) was often used to identify crops during this period of research [
10,
11,
12]. In particular, considerable attention focused on identification of rice using single-polarized SAR data [
13,
14,
15]. This was because the σ
0 of rice varies substantially throughout the growing season, and because the dielectric properties of a paddy field are markedly different from those of other crop types. However, little attention has been given to dryland crop classification using SAR imagery because of the complex planting structures and similar dielectric properties of such crops.
Distinguishing crops in SAR imagery is dependent primarily on their geometric configuration (e.g., size, shape, and leaf inclination), the cropping system (e.g., planting density and row direction), and the dielectric properties of the crop canopy and the underlying background soil [
16]. However, a single- or dual-polarization SAR system has no capability to provide sufficient information with which to characterize such crop-related differences. Consequently, the accuracy of crop classification using single-polarized SAR data remains low, especially for dryland crops. In comparison with the single- or dual-polarization approaches, polarimetric SAR (PolSAR, also called quad-polarimetric or fully polarized SAR) with four polarization channels can provide richer information on the scattering mechanisms of various targets with different shapes and structures that can be used to distinguish them. Therefore, this approach has been used widely during the previous 10 years to improve crop classification accuracy [
17,
18,
19,
20,
21,
22].
Polarimetric target decomposition methods are used commonly to extract various polarization features of land surface objects from PolSAR imagery. Depending on whether there is a change in the scattering properties of a target, polarimetric decomposition methods can be classified into two main categories: coherent decomposition that is based on a single-look Sinclair scattering matrix, and incoherent decomposition that is based on a multilook scattering matrix, i.e., the coherency matrix or the covariance matrix [
23,
24]. Usually, coherent decomposition is applied to analyze a “pure single target” that has deterministic or stationary scattering characteristics [
24]. Representative approaches include the Pauli, Krogager, and Cameron decompositions. In contrast, incoherent decomposition is applied to investigate distributed targets with probabilistic scattering properties. Accordingly, representative approaches include eigen-based decomposition (e.g., Cloude–Pottier (C–P) decomposition) and model-based decomposition (e.g., Freeman–Durden (F–D) and Yamaguchi decomposition). As crops growing on farmland represent distributed targets, their polarization features are usually extracted using an incoherent decomposition approach. Many previous studies using PolSAR data have demonstrated that crop classification accuracy can be improved using various features derived from polarimetric decomposition [
25,
26,
27]. For example, using L-band PolSAR data, McNairn et al. [
25] found that the polarization features derived using the C–P and F–D decomposition methods produced superior accuracy in classification of crops (e.g., corn, soybeans, cereals, and hay-pasture) relative to that achieved using linear polarization. Many features can be extracted from PolSAR imagery using polarimetric target decomposition methods; however, it remains unclear which features are most suitable for dryland crop classification.
Generally, most crops have a growing season of several months. In this short time, different crops show distinct variations in terms of their geometric shape, structure, and dielectric properties with evolution of the phenological period [
28]. Therefore, multitemporal SAR imagery has often been employed to improve crop discrimination capability and classification results. Huang et al. [
21] used seven polarimetric RADARSAT-2 images of southwestern Ontario (Canada) to analyze the scattering mechanisms of six land-cover types that included wheat, soybean, and corn. They acquired a classification map with overall accuracy of 87.5% based on the distinct scattering mechanisms of different land cover types. To improve classification accuracy, Xie et al. [
24] acquired a time series of 11 polarimetric RADARSAT-2 SAR images of an agricultural site in London, Ontario (Canada), and they employed the Neumann decomposition approach to extract the discriminant features and the random forest (RF) method to classify 9 land-cover types. The overall accuracy (OA) and the Kappa coefficient of the classification of the nine land-cover types in their study were 94.12% and 0.92, respectively. In comparison with single-date data, better classification accuracy can be achieved when using multitemporal SAR images [
29,
30,
31]. However, any improvement in accuracy is often accompanied by high costs related to imagery acquisition and increased workload associated with data processing owing to the increase of the image time phase. Consequently, little attention has been paid to the time phase selection or optimization of SAR imagery for use in crop classification, especially dryland crops.
The classifier is an important component in any image classification procedure. After discriminant features have been determined, an appropriate classification algorithm is required to produce an accurate crop map. The various approaches that have been developed for crop classification using PolSAR imagery can be divided broadly into two categories: (1) algorithms based on statistical models and (2) algorithms based on machine learning theory. Conventional statistical algorithms include the maximum likelihood classifier [
32], Wishart classifier [
22,
33], and Hoekman and Vissers classifier [
34]. Of these, the Wishart classifier is adopted most commonly for crop classification using the PolSAR data. However, statistical methods such as these depend on the assumption that the pixels to be classified have a specific probability distribution, which hinders the performance of the algorithm. Machine-learning algorithms do not require determination of the probability distribution function of the pixels in the imagery and hence overcome the shortcomings of statistical algorithms [
16]. In comparison with statistical methods, machine-learning methods have been proven to produce higher classification accuracy [
16,
35,
36,
37,
38,
39]. Owing to their high accuracy and ease of operation, the support vector machine (SVM) and RF approaches are two of the machine learning methods used most widely for crop classification. However, little consideration has been given to the determination of which method is most suitable for dryland crop classification using satellite-based PolSAR imagery.
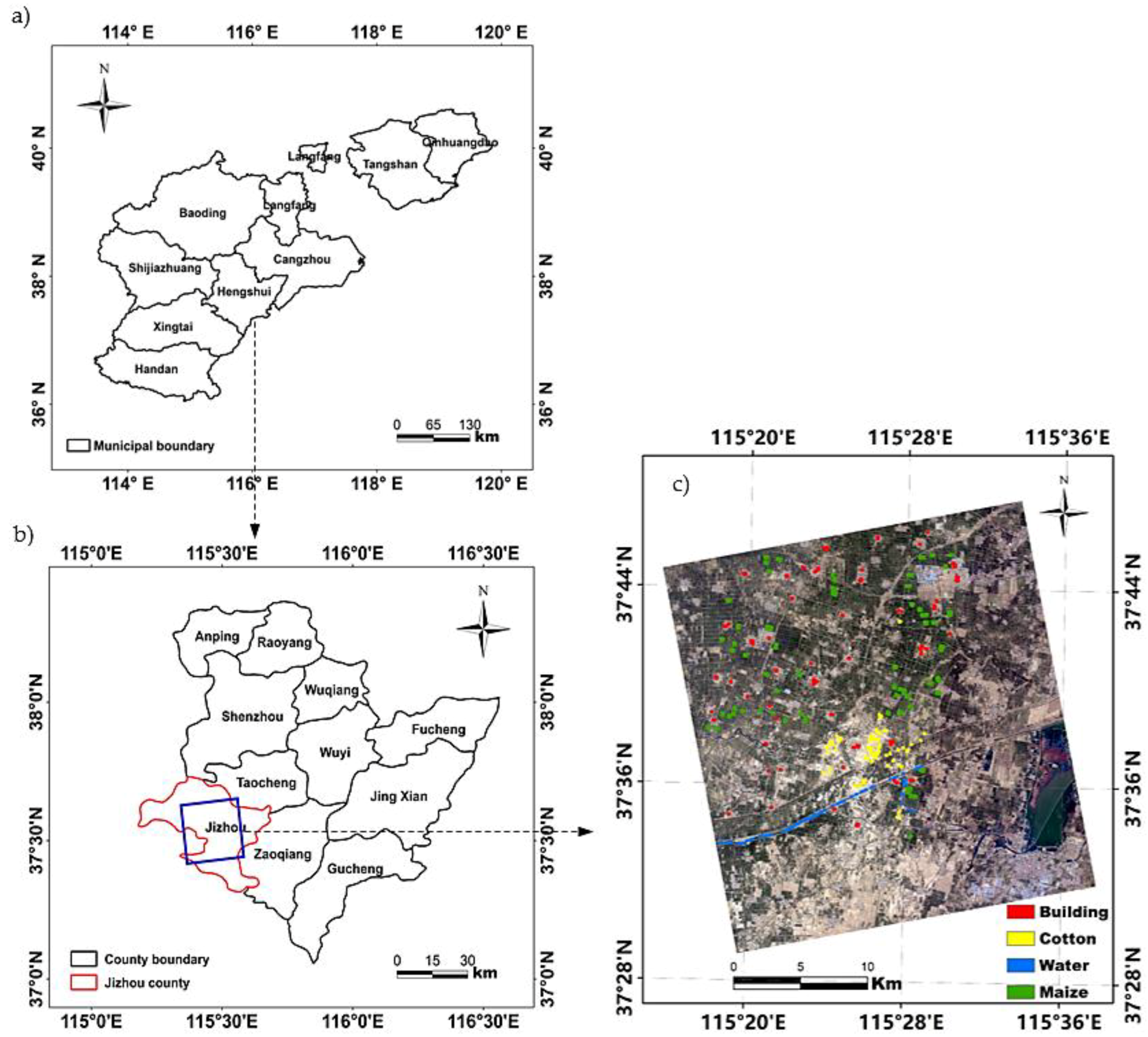
Based on RADARSAT-2 PolSAR imagery, this study compared the accuracy of classification of typical dryland crops (i.e., maize and cotton) at different phenological stages in Jizhou county, Hebei plain, China. The importance of various features extracted from the multitemporal PolSAR data for crop discrimination was investigated, and the optimal observation periods, features, and algorithms for dryland crop classification using PolSAR data were established. The remainder of this paper is organized as follows.
Section 2 introduces the study site and the data used.
Section 3 reports on the various features considered and their extraction methods, as well as the classification algorithms.
Section 4 presents analysis of the experimental results. Finally, a discussion and our conclusions are provided in
Section 5 and
Section 6, respectively.
5. Discussion
Hebei plain is an important area of grain and cotton production in China. Maize and cotton are two predominant dryland crops cultivated in Hebei plain, and their production provides an important contribution to the income of farmers and ensures China’s food security. Timely and accurate classification of maize and cotton plays a key role in forecasting dryland crops yields and enhancing agricultural management in Hebei plain. However, owing to the cloudy/rainy weather that occurs frequently during the growing period of the two dryland crops, remotely sensed optical imagery suitable for dryland crop classification is often unavailable. Although satellite-based SAR imagery with its all-weather observation capability has been used to overcome this shortcoming, the accuracy of dryland crop classification using single-date satellite-based SAR data is generally not high. In this study, we chose Jizhou county which can represent the cropping characteristic of Hebei plain as the study area, and analyzed the influence of various features and acquisition dates of polarimetric RADARSAT-2 images on the accuracy of the two dryland crops’ classification; furthermore, the number of features and PolSAR images was optimized by the quantitative assessment of feature importance. Specifically, satisfactory accuracy in the classification of dryland crops was achieved using 11 optimized features (extracted using the C–P polarization decomposition approach and the Coherency Matrix) and 2 RADARSAT-2 images (acquisition dates corresponding to the middle and late growing stages of the dryland crops). Finally, a stable accuracy can be achieved using the dryland crop classification method proposed in the study, based on a two-fold cross validation. In this way, this study illustrates key features and phenological stage suitable for dryland crop classification by satellite-based PolSAR image, and improves the accuracy of dryland crop classification significantly only using 11 features from 2 full polarization RADARSAT-2 images. Furthermore, this classification method combining multitype features and multitemporal PolSAR images also provides a reference for timely and accurate classification of dryland crop in Hebei plain, China.
We compared quantitatively the accuracy of dryland crop classification using full polarimetric RADARSAT-2 imagery with different acquisition dates. We demonstrated that higher classification accuracy could be achieved using multitemporal PolSAR imagery in comparison with that of single-date imagery, which is consistent with the findings of previous studies [
20,
24,
28,
46]. Based on observational results of LAI and PH of the studied dryland crops in three phenological stages corresponding to the different acquisition dates of the RADARSAT-2 images, we also analyzed the effect of acquisition date of PolSAR imagery on the accuracy of dryland crop classification. We demonstrated that the highest classification accuracy could be achieved using imagery that corresponded to the early maturation period of the dryland crops. This finding differs from previous studies that considered only the relative classification accuracies achieved on specific dates of imagery acquisition. Furthermore, in previous studies, the time of imagery acquisition was not associated with the phenological stage of the crops, and the differences in classification accuracy were not analyzed or explained in relation to the different dates of acquisition of the SAR imagery. Regarding the extraction and selection of features, we used various approaches and 3 full polarimetric RADARSAT-2 images to extract 117 features for dryland crop classification. Based on assessment of the relative importance of all the features, it was demonstrated that the Shannon entropy extracted using the C–P polarization decomposition method made an important contribution to the accuracy of dryland crop mapping. This finding is also in accord with the results of previous research [
9]. The backscattering coefficient in different polarization modes and the polarization decomposition parameters extracted using the C–P, F–D, and Yamaguchi decomposition methods have been used widely for land-cover and land-use classification. In addition to these features, we also used other backscattering intensity features, e.g., the main diagonal elements in the Coherency Matrix, and the polarization parameters extracted using the MCSM decomposition approach to enhance the accuracy of dryland crop classification. This novel combination of various features is markedly different from that of previous studies [
9,
20,
29,
35]. For optimization of the process, we used the RF algorithm to identify the most important features and the critical dates of imagery acquisition, the use of which was shown to both improve significantly the efficiency of crop classification and reduce the workload and costs associated with crop mapping. This represents the innovation of this study.
Although the OA of dryland crop classification using the proposed method exceeded 90%, the PA of the classification of cotton remained unsatisfactory. Moreover, the results of the classification of cotton were found to often vary greatly with different features and different dates of acquisition of SAR imagery. As shown in
Figure 6, maize is the dominant crop in the study area and it is often cultivated in large plots. In contrast, cotton is often cultivated in small-sized scattered plots that might be overlooked in the crop classification process, which could lead to large omission errors. Therefore, greater attention should be paid to minor crops (e.g., cotton) cultivated in small-sized plots in further study. In addition, we used only three images with different acquisition dates to analyze the classification performance of the full polarimetric RADARSAT-2 data. However, three dates cannot cover the entire phenological period of dryland crops. Therefore, additional imagery corresponding to each growth stage of the crops will be required in future research to determine the optimal imagery acquisition times and features required for accurate and high-efficiency dryland crop classification.
6. Conclusions
In this study, an in-depth investigation was conducted into the accuracy of the classification of two typical dryland crops (maize and cotton) in Jizhou county, Hebei plain, China using satellite-based PolSAR imagery. Three quad-polarimetric RADARSAT-2 images, 117 features extracted using different approaches and images, and 2 algorithms were used to classify the two dryland crops and other typical ground objects in the study area. The accuracies of dryland crop classification using different features, images, and algorithms were compared quantitatively, and the relative importance of each of the features used in the classification process was assessed. Finally, the optimal features, algorithm, and phenological period for dryland crop classification using RADARSAT-2 PolSAR imagery were proposed. The main conclusions of this study are as follows.
First, the accuracy of dryland crop classification increased with the evolution of the phenological period. For the three growing periods investigated in this study, maximum accuracy was achieved using quad-polarimetric RADARSAT-2 imagery acquired in the early maturation stage of the dryland crops. In comparison with the SVM algorithm, the RF algorithm was found most suitable for dryland crop classification using satellite-based PolSAR imagery.
Second, dryland crop classification accuracy was not improved substantially when using only backscattering intensity or polarization decomposition features extracted from a single RADARSAT-2 image. However, satisfactory accuracy could be achieved using a combination of multitype features and multitemporal RADARSAT-2 imagery.
Finally, based on assessment of the relative importance of all the features, 11 features (extracted using the C–P decomposition method and Coherency Matrix) and 2 phenological stages (the jointing or budding stage of maize and cotton and their maturation stage) were found to make important contributions to the accuracy of the classification of dryland crops. A high and reliable accuracy of dryland crop classification can be achieved only using the 11 features from 2 full polarization RADARSAT-2 images, based on a two-fold cross validation.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}