RF-Powered Low-Energy Sensor Nodes for Predictive Maintenance in Electromagnetically Harsh Industrial Environments

 ,
,  ,
,  , ,
, ,  ,
,
Abstract
:1. Introduction
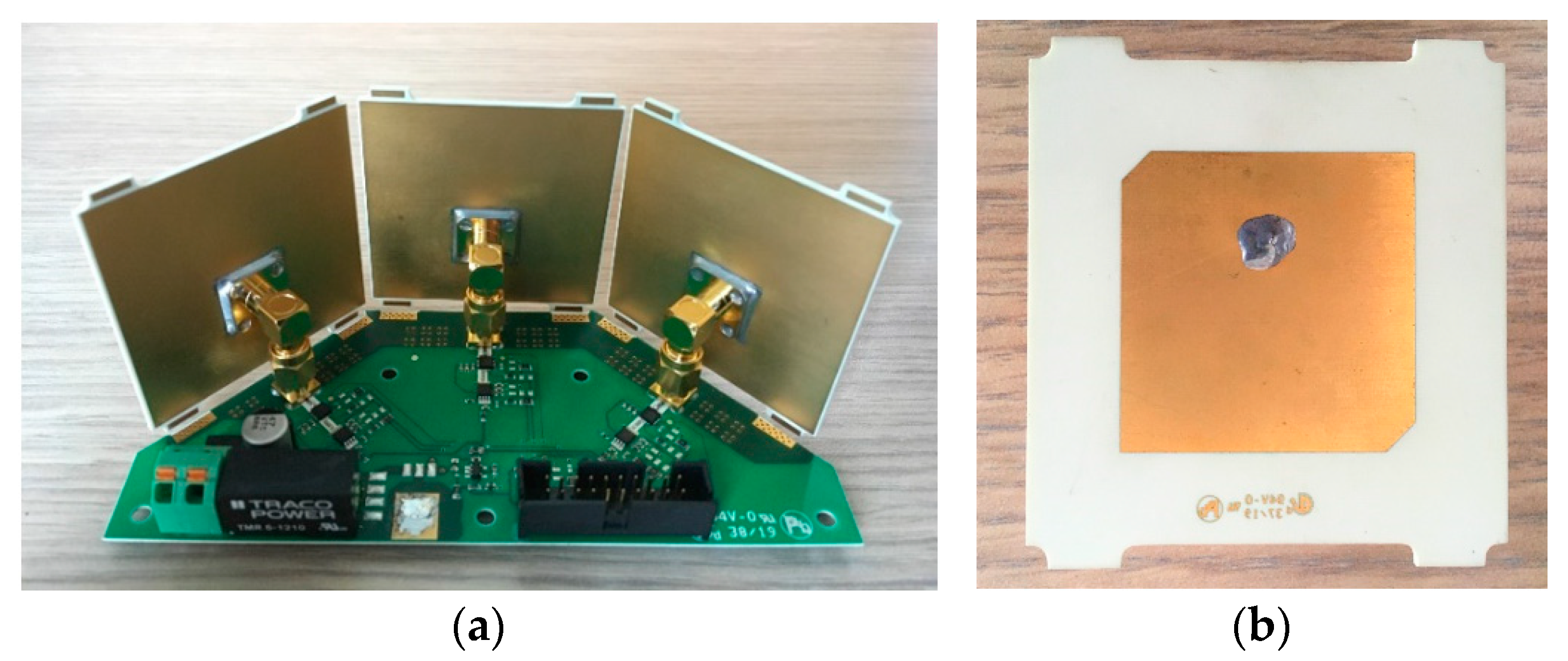
2. RF Illuminator Design and Characterization
3. Design of the Wirelessly Activated Node
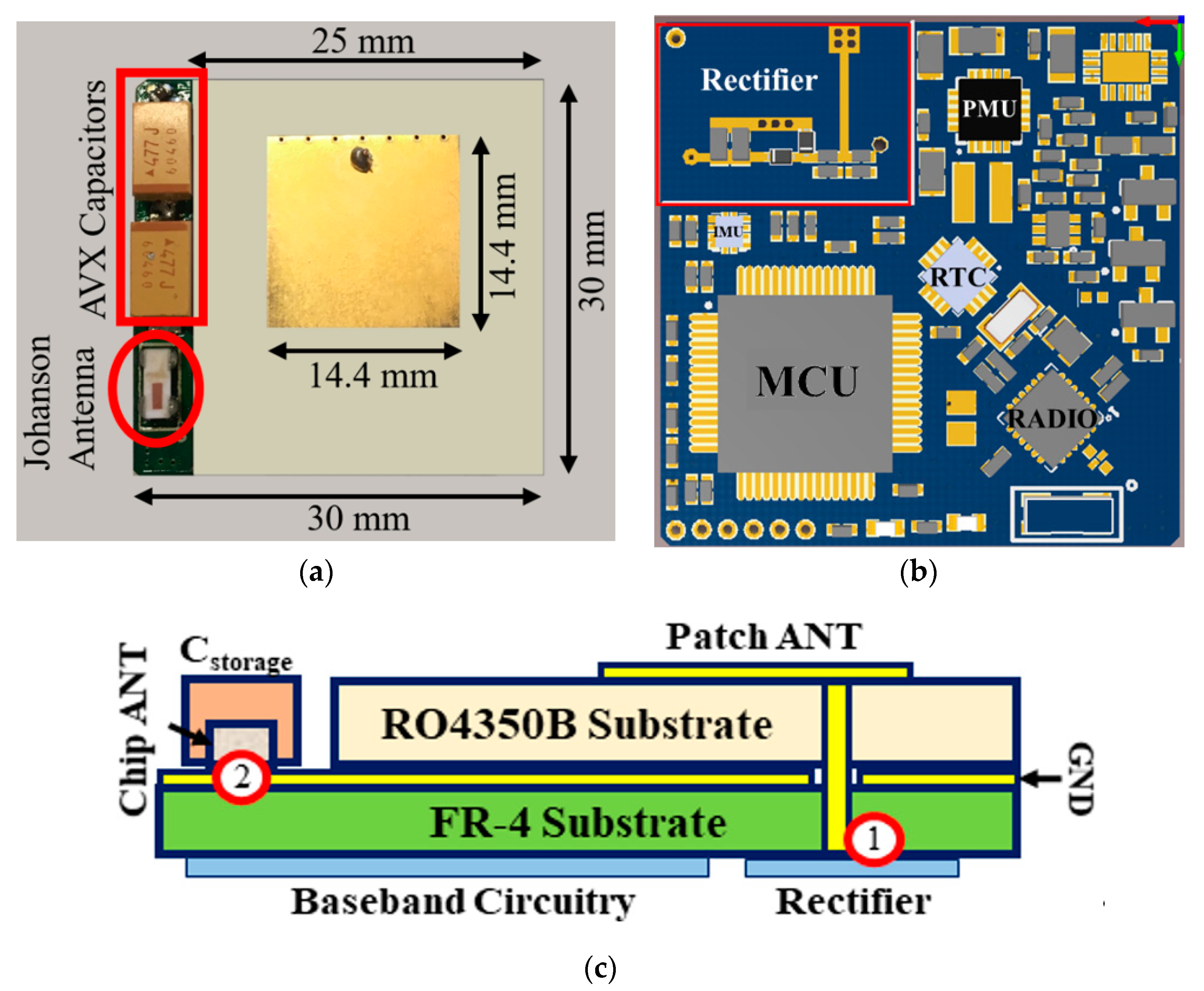
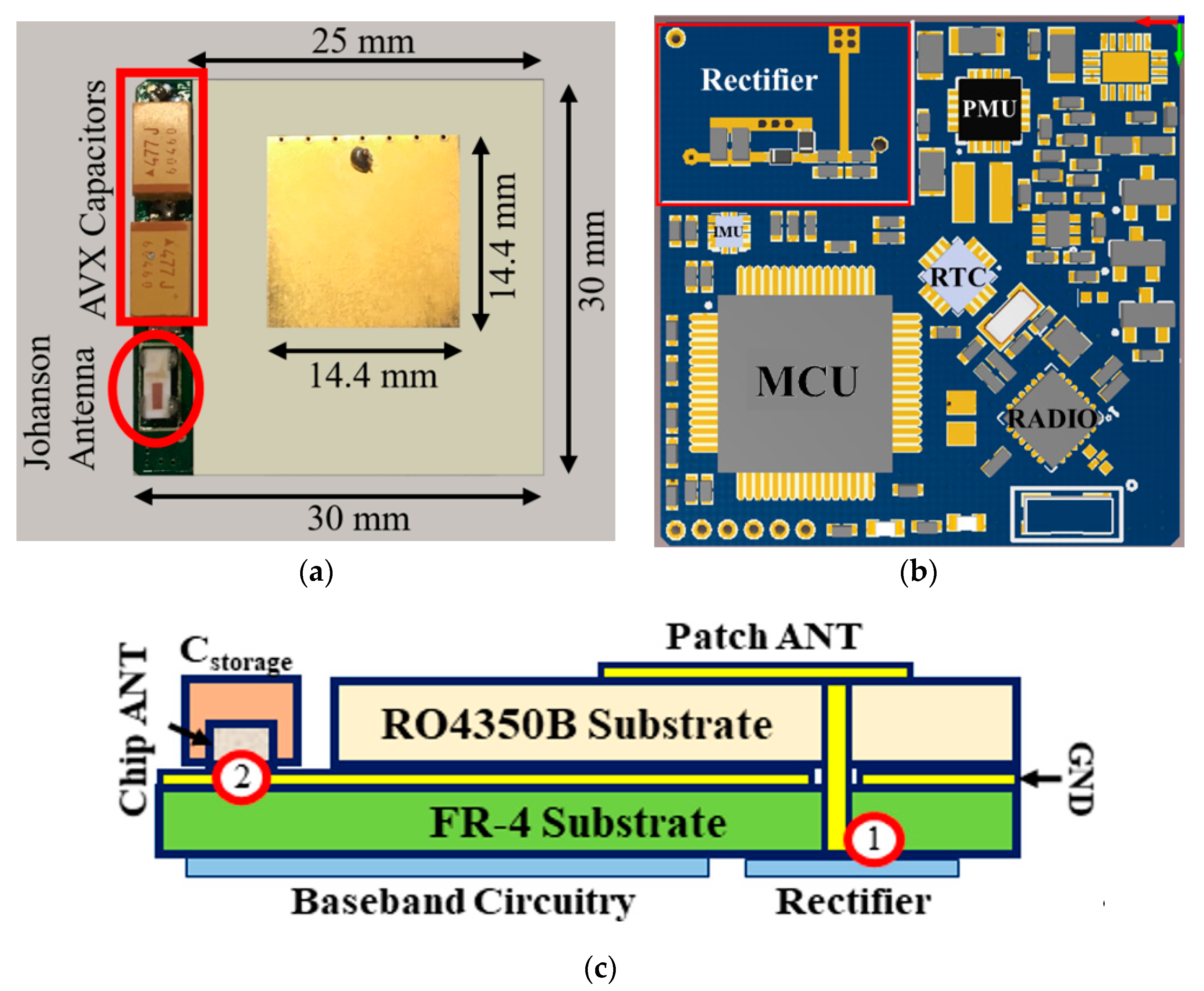
- Two co-located antennas, operating in the same frequency band and adopting frequency diverse technique discussed above, one for receiving the energy to be harvested from the WPT, and one for the communication.
- A rectifier for converting the RF signal into a DC signal to be fed to the buck-boost DC/DC converter in the power management section.
- A power management section that efficiently harvests energy at the rectifier’s output to the storage elements and manages the power supply to the sensor node.
- A low power microcontroller unit (MCU, STM32L476RE, STMicroelectronics, Geneva, Switzerland) to control the node peripherals.
- A 2.4 GHz SX1280 transceiver (Semtech Corporation, Camarillo, CA, USA) supporting LoRa communication protocol, feeding a 2450AT42E0100 (Johanson Technology, Camarillo, CA, USA) 2.4 GHz surface mount technology (SMT) above-metal mini chip antenna.
- An ultra-low-power three-axis accelerometer (IIS2DLPC, STMicroelectronics, Geneva, Switzerland) for inertial sensing.
- An ultra-low-power real-time clock (AB1805, Abracon, Spicewood, TX, USA) for duty-cycling the node operation, by turning on the node at specific time intervals only.
3.1. Node Operations
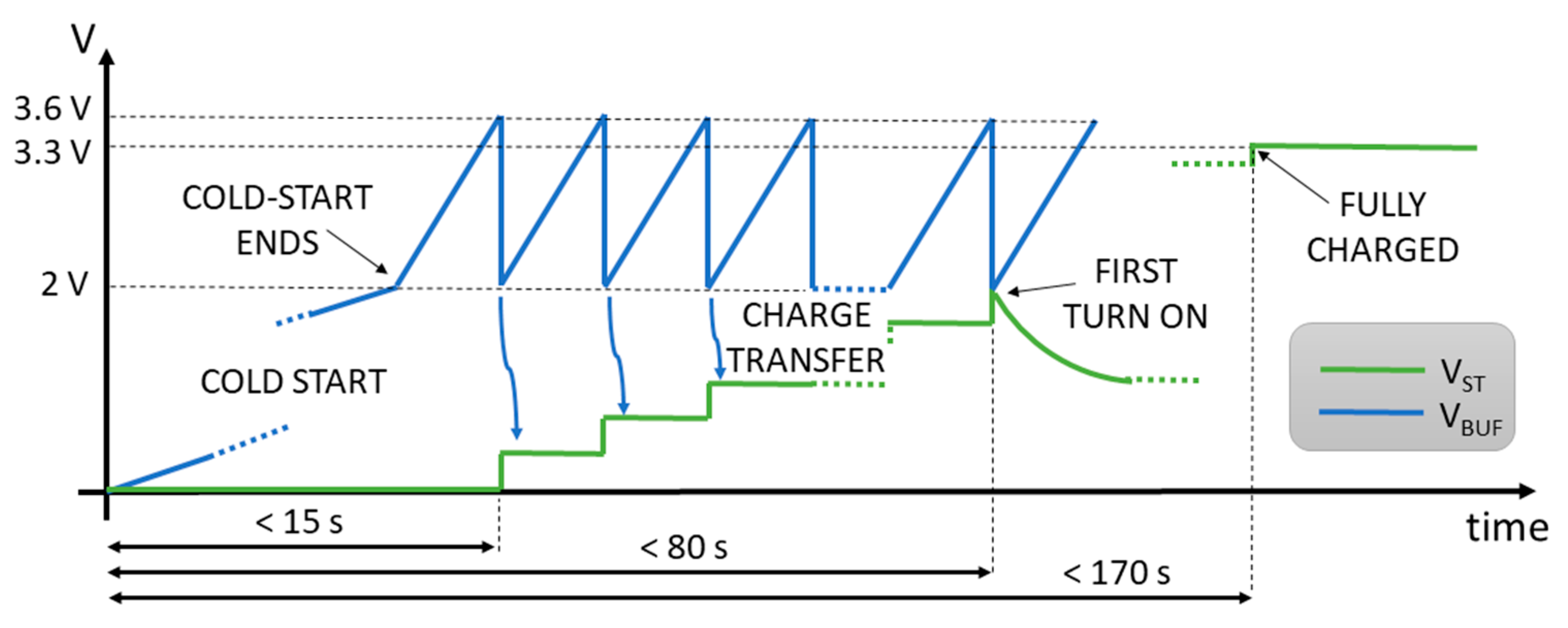
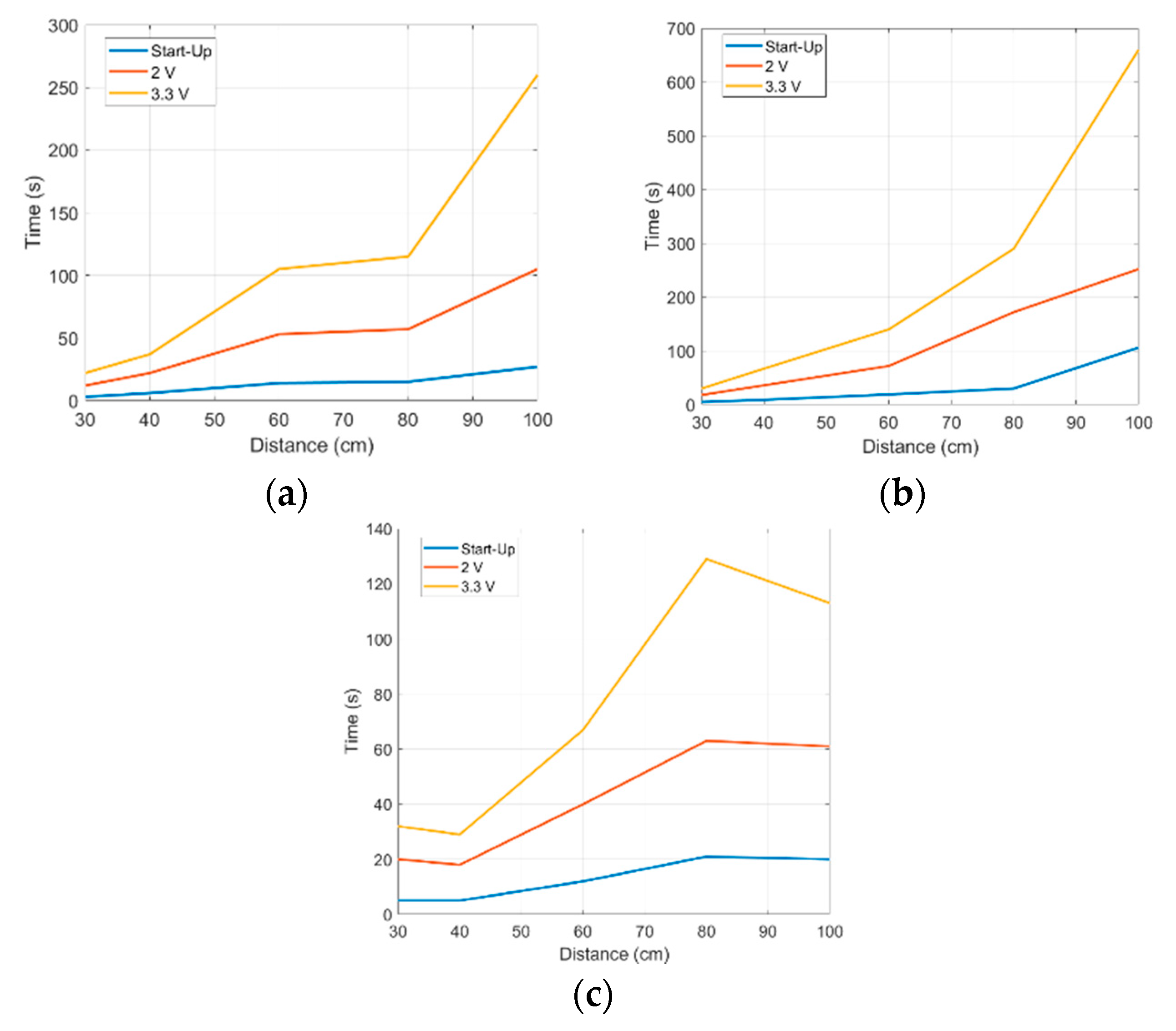
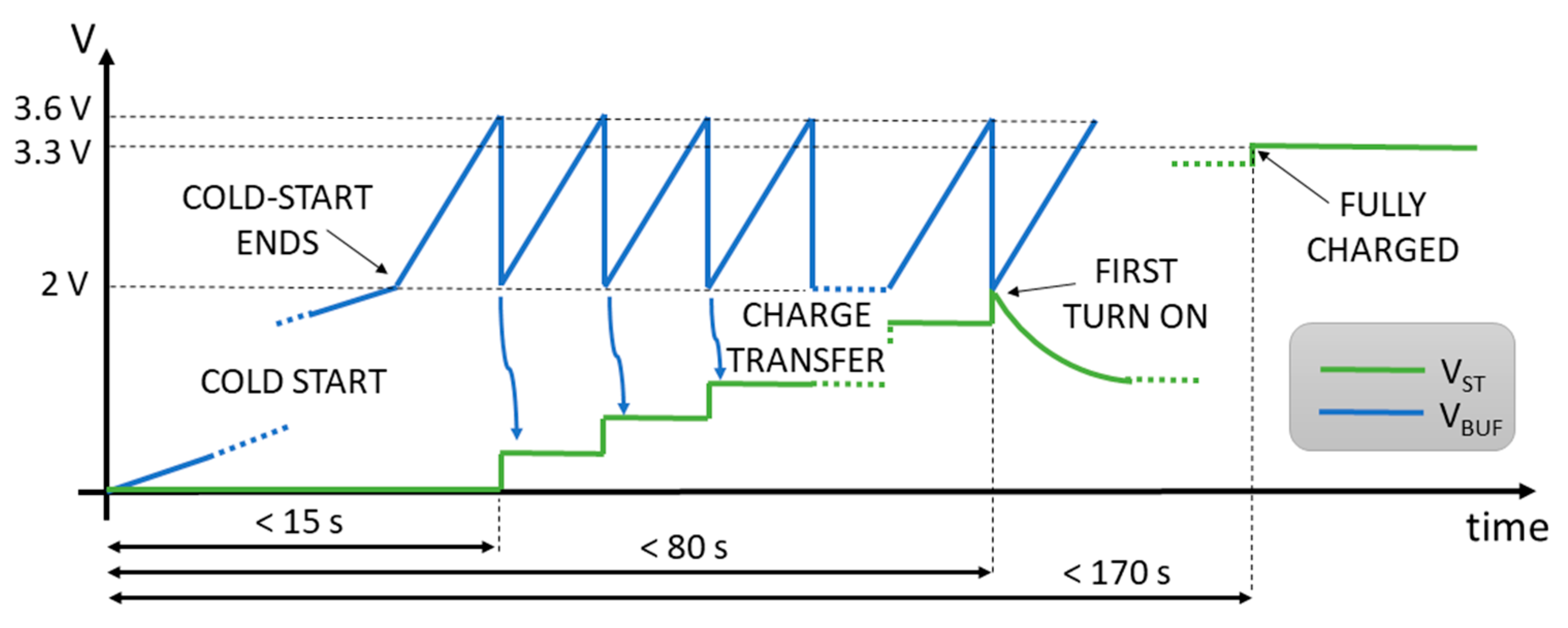
- START-UP: when power is available at the input, but the storage element is depleted, an undervoltage-lockout (UVLO) circuit keeps the load disconnected from the storage elements until it gets charged up to 2 V. During start-up, only charging operation occurs to minimize losses and charge time and to avoid deadlock conditions, which could happen with an extremely low input power level.
- POWER-ON: when the storage element voltage is above 2 V, the node turns on for the first time and transmits a short package to the gateway of the WSN to signal its presence in the system. The gateway replies with an acknowledgment. The MCU programs the real-time clock (RTC) to wake up the node after the scheduled time. The RTC puts the node in an ultra-low-power sleep mode by cutting off the power supply to the load.
- SLEEP MODE: only the RTC is on, with the node power consumption given by the RTC itself and the PMOS (p-type metal oxide semiconductor) load switch leakage currents. Overall current consumption is below 150 nA. The power management section keeps charging the storage element until it reaches the maximum voltage or 3.3 V.
- ACTIVE MODE: after the programmed sleep time has passed, the RTC awakes the node, and the MCU starts acquisition of accelerometer and temperature data over a 1-s window, processes it (for simplicity, we limit ourselves to minimum, maximum and average on the three-axis in this example), and sends the data to the gateway. The gateway replies with an acknowledgment and, eventually, information on the next wake up time. The node programs the RTC and goes back to sleep mode until the RTC wakes it up again.
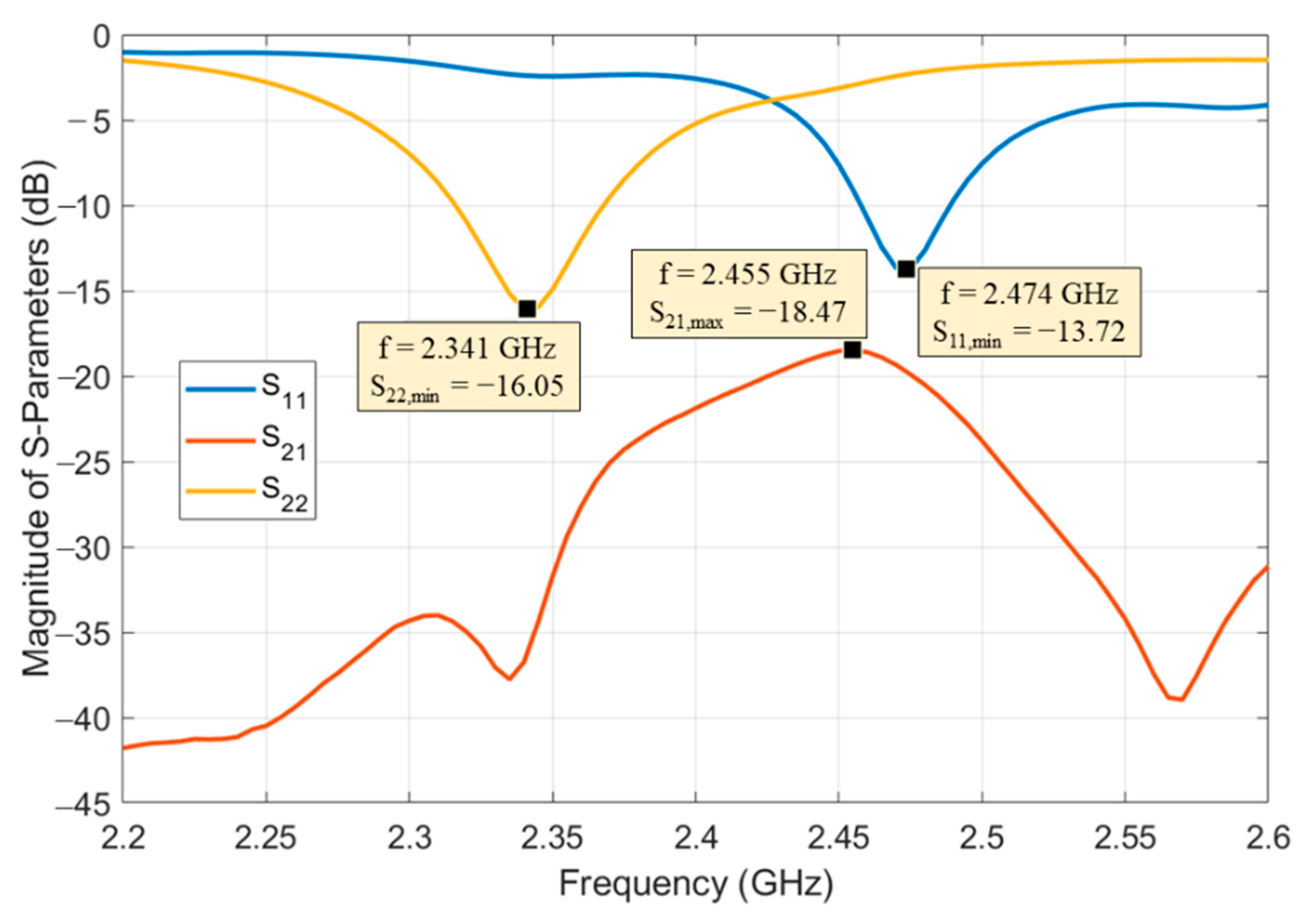
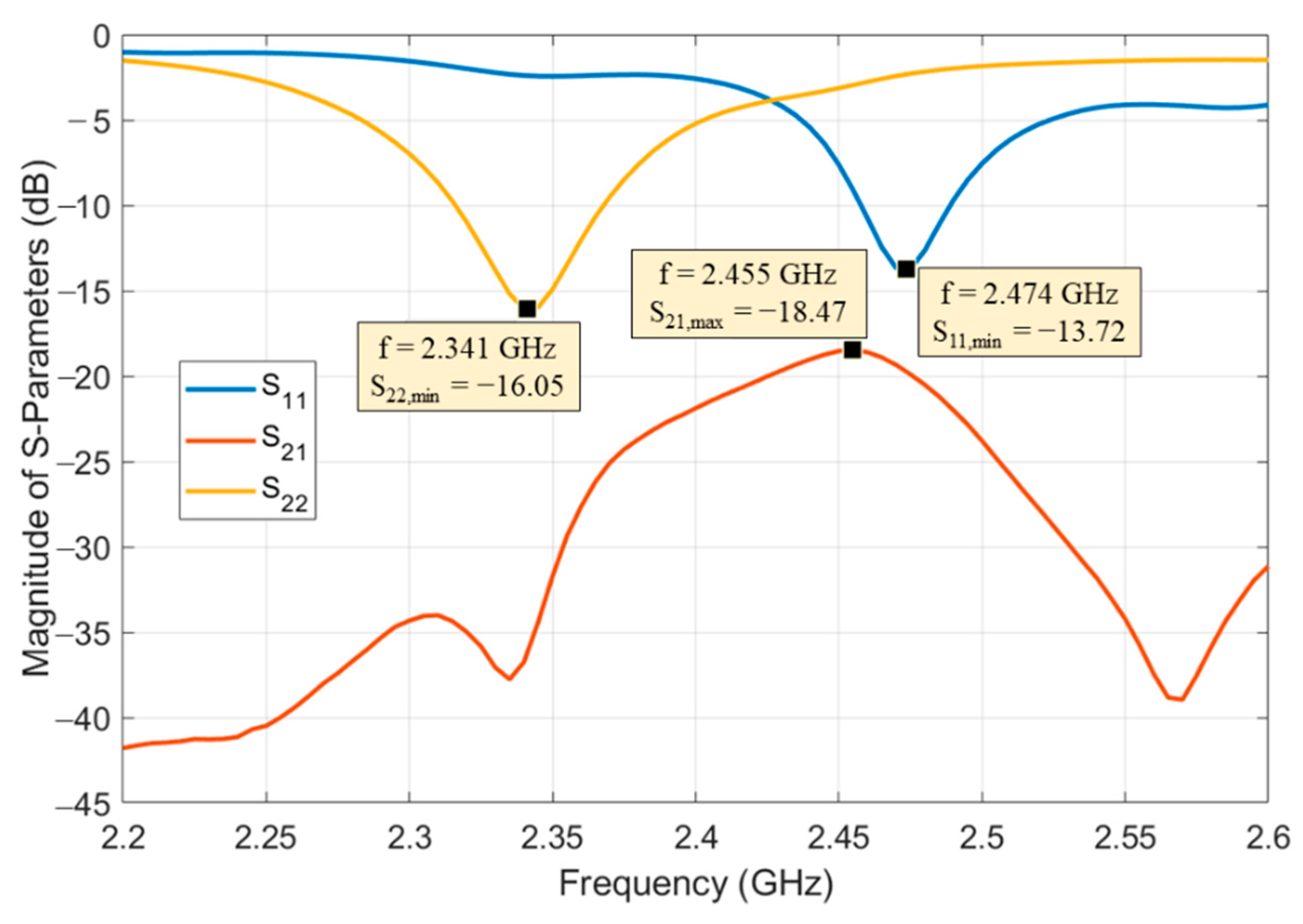
3.2. Top Layer Radiative Part for Wireless Energy and Data Transfer
3.3. Energy Harvesting and Power Management
3.4. Sensing, Communication, and Control
4. System Measurement Campaigns
4.1. Sensor Node Consumption
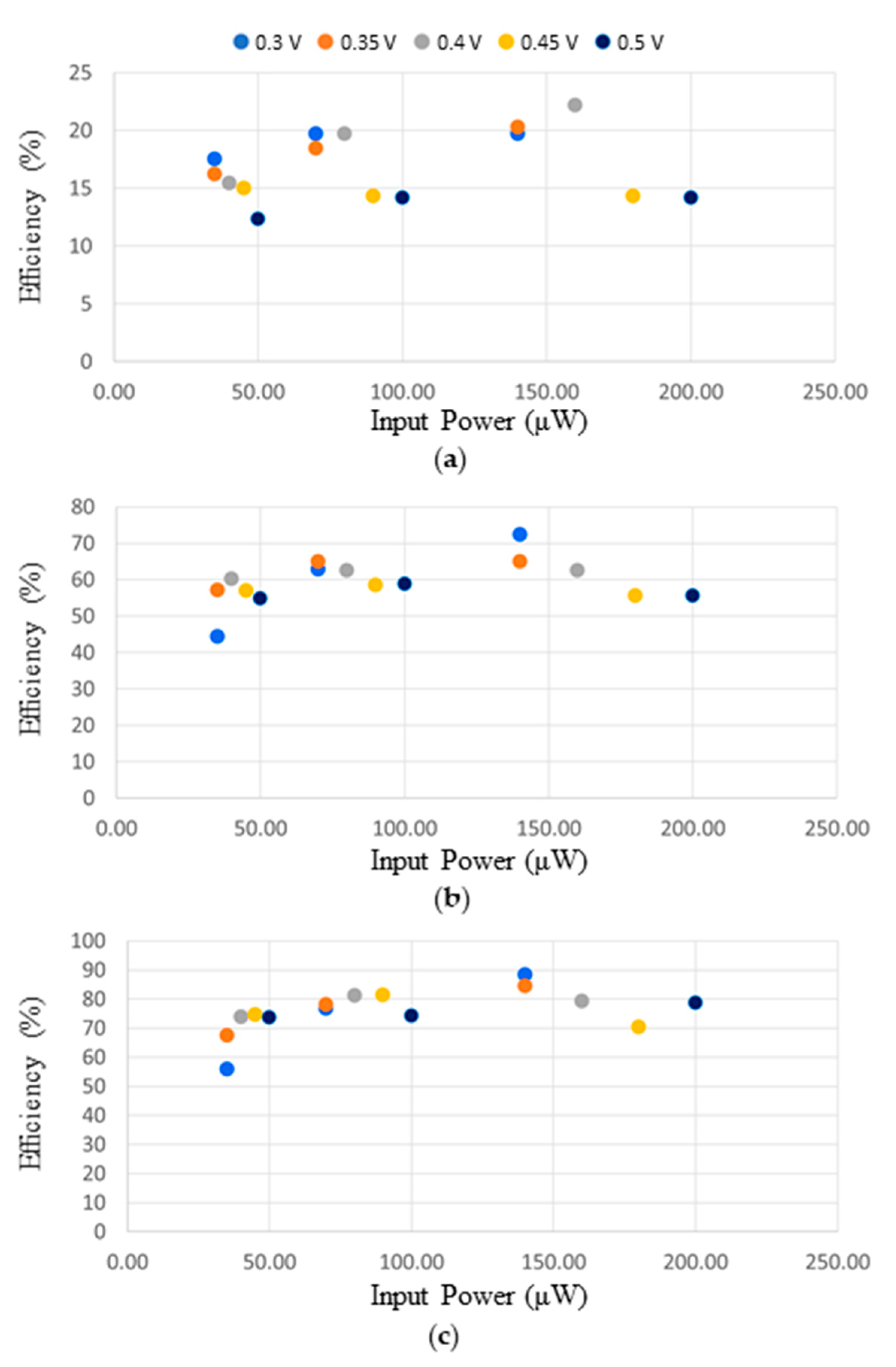
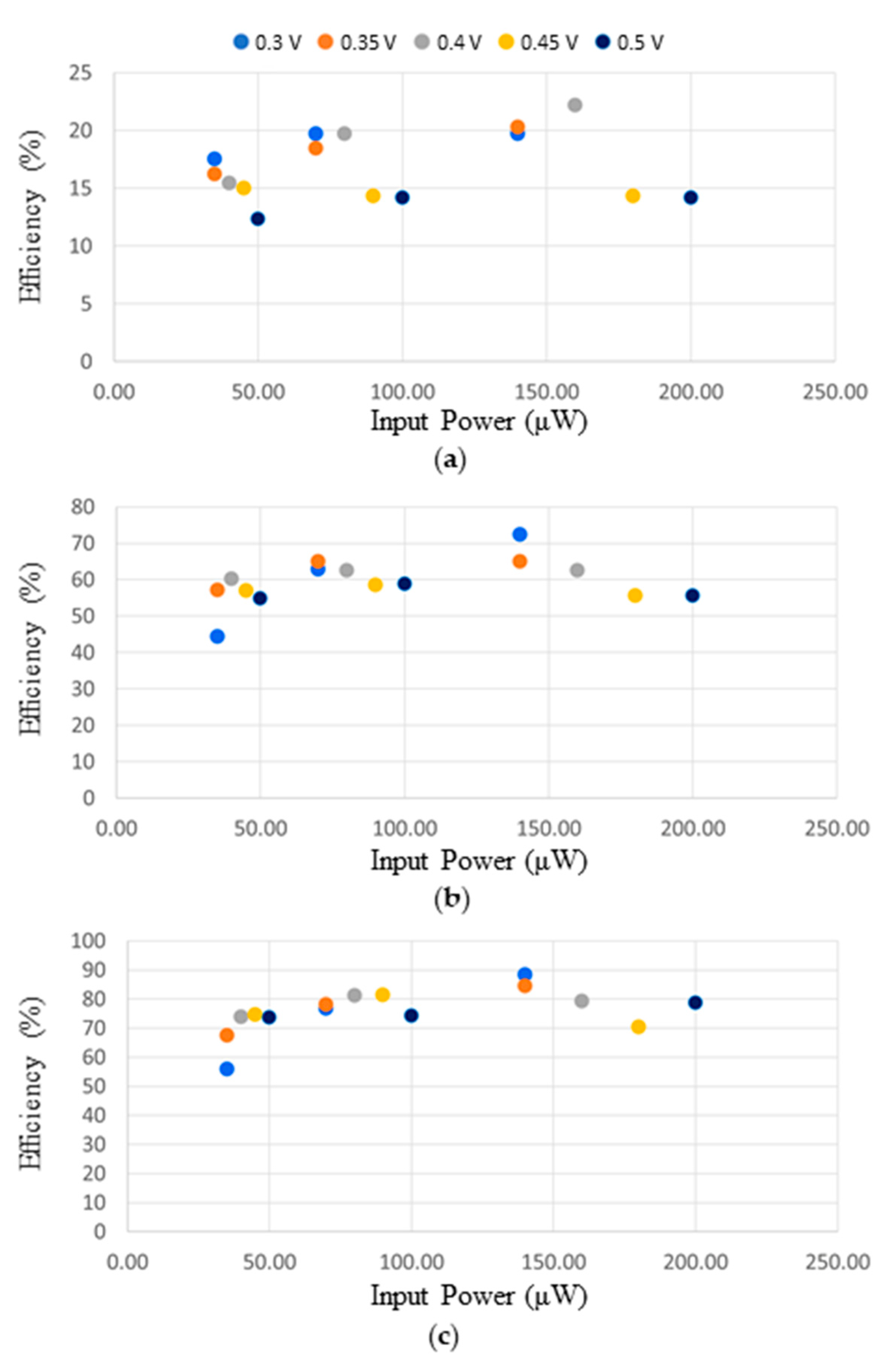
4.2. Rectifying and WPT Characterization
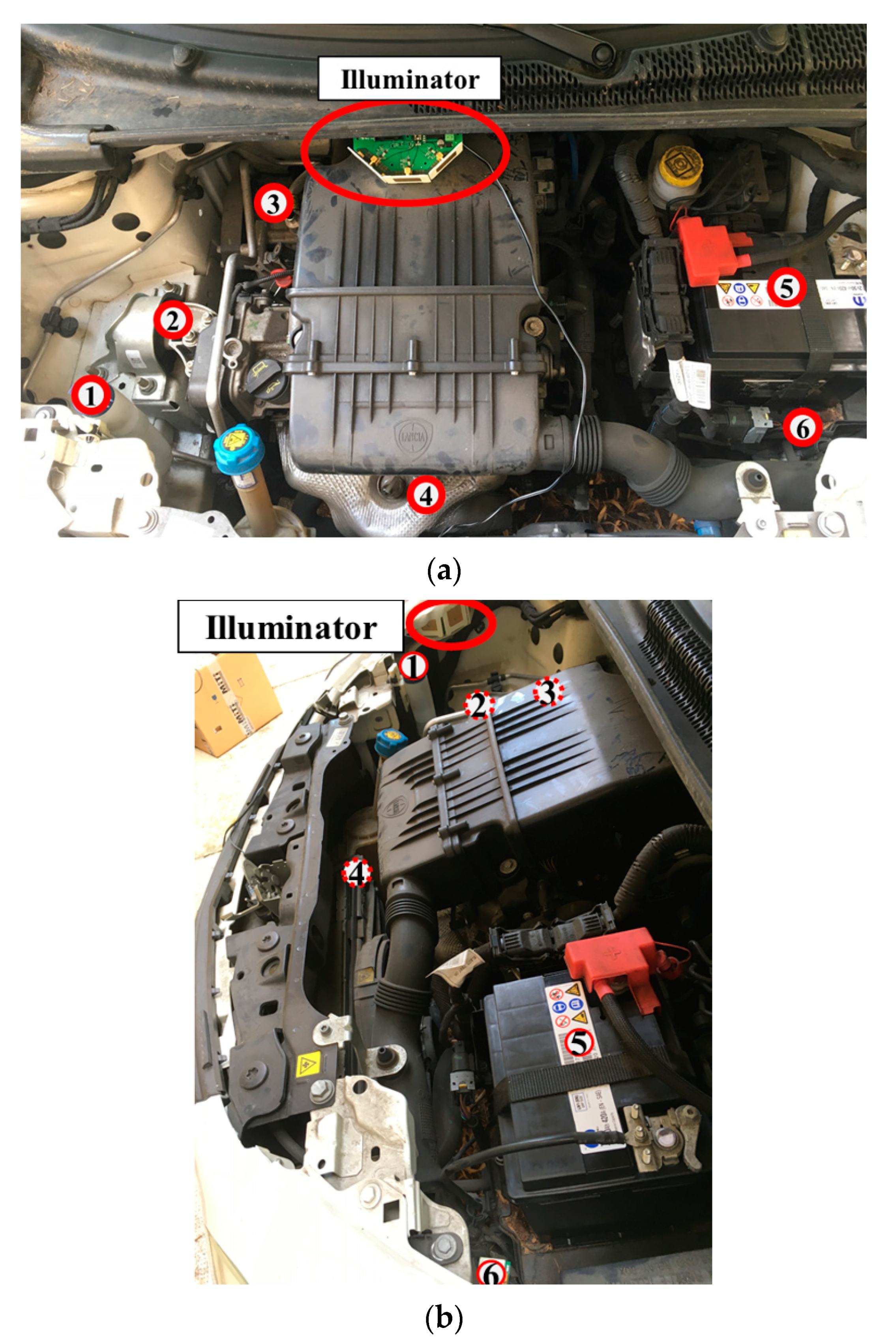
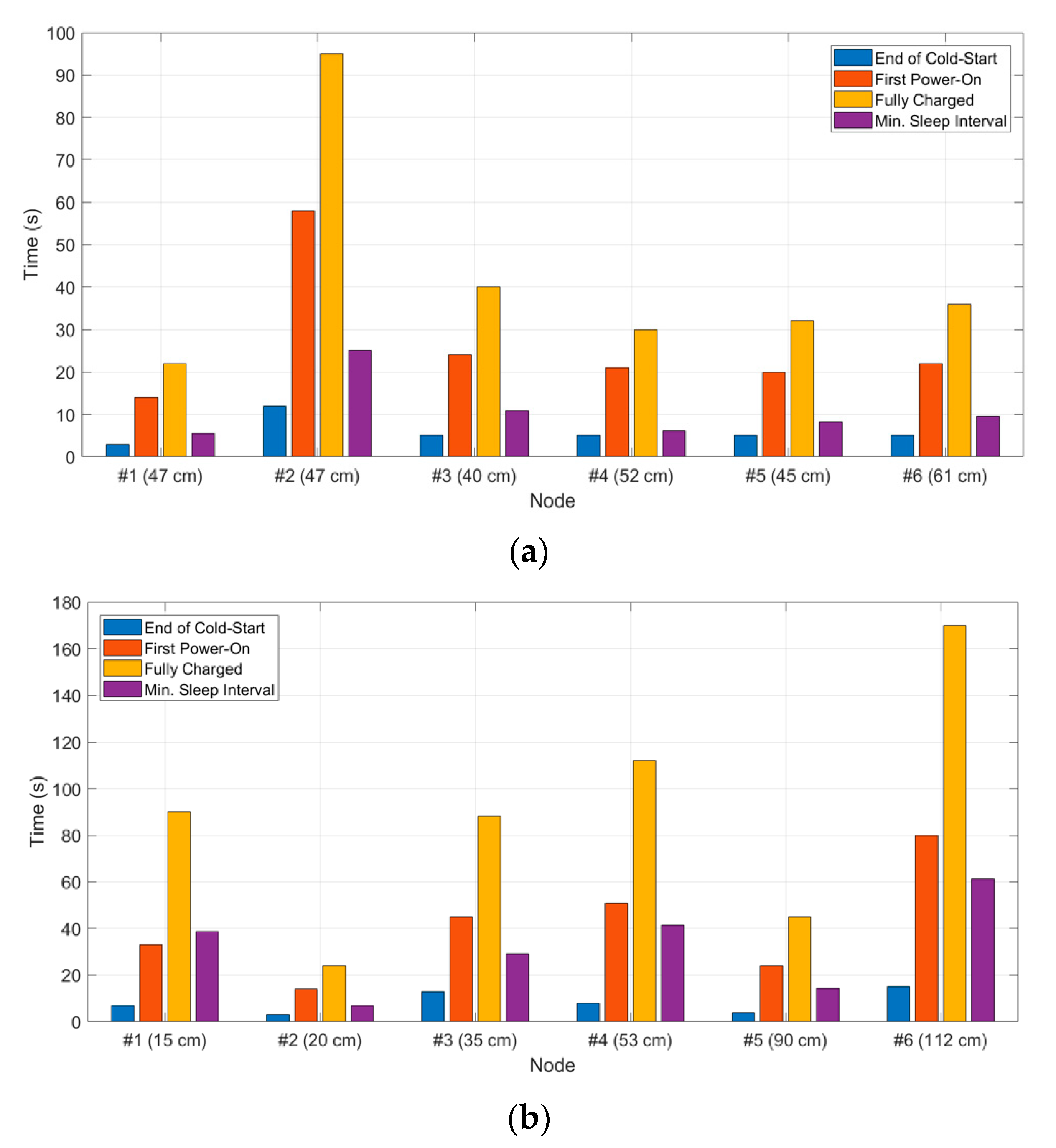
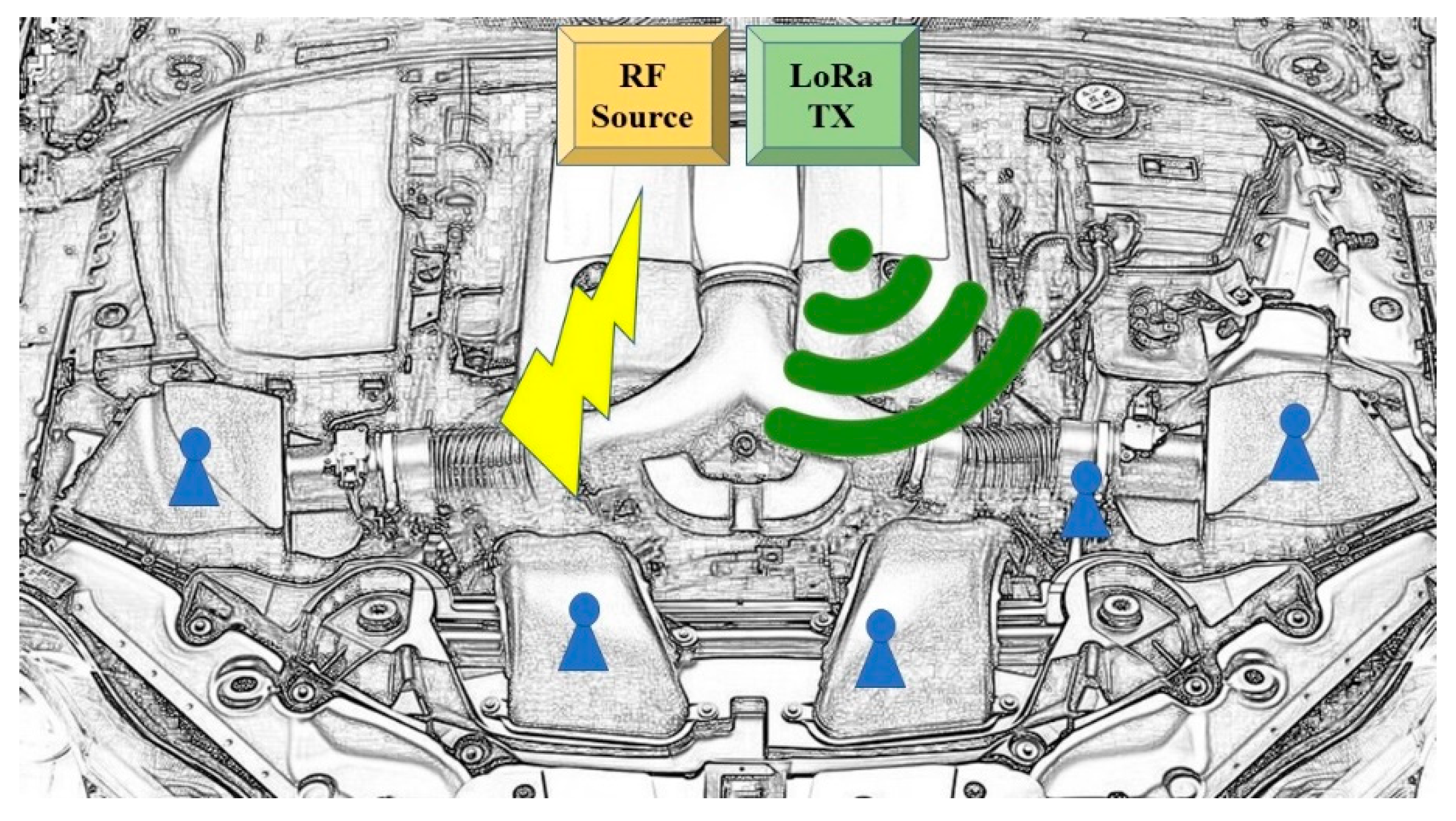
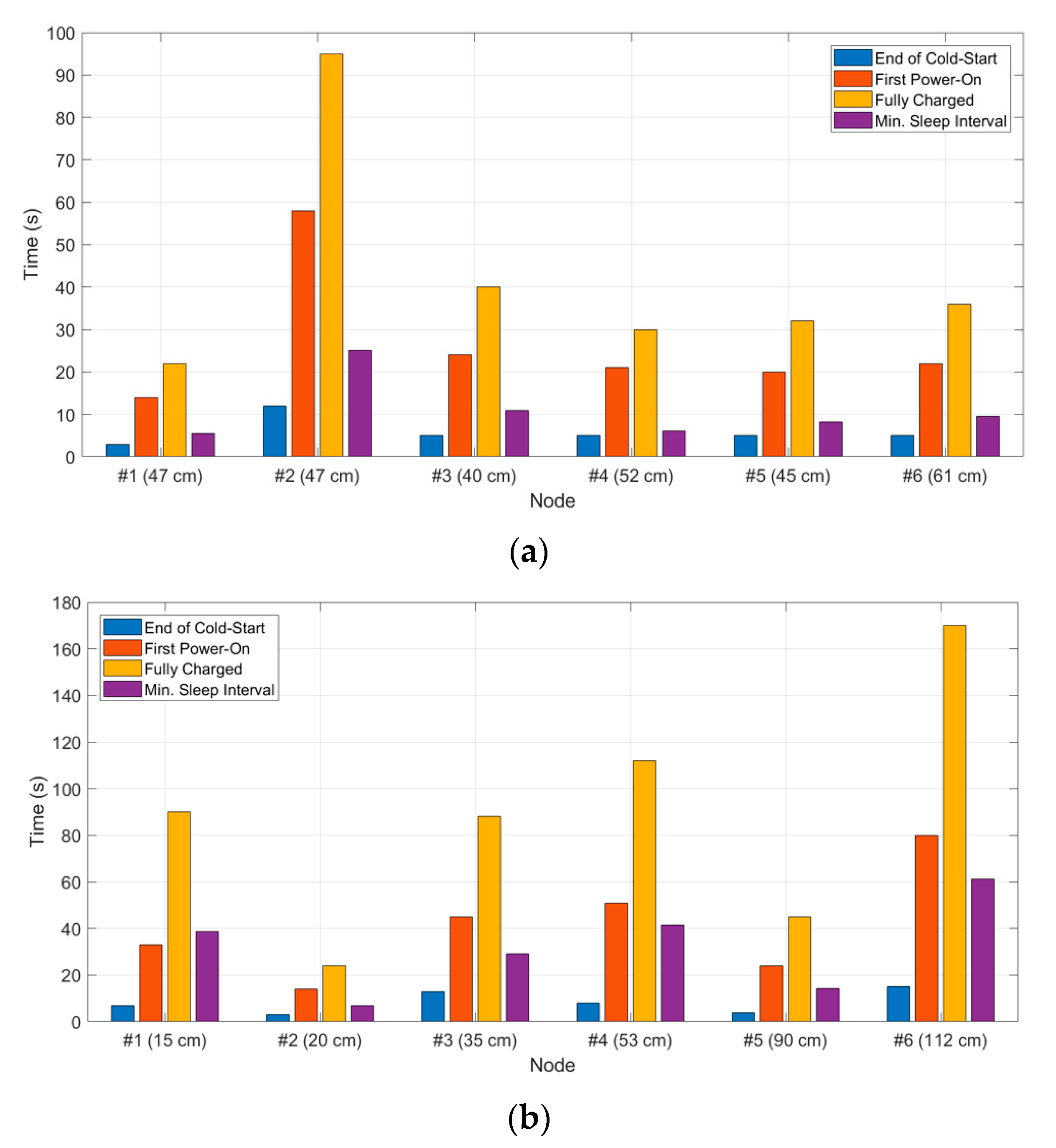
4.3. Case Study: Measurement Campaign in the Engine Compartment of a Car
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Fleming, W.J. New Automotive Sensors—A Review. IEEE Sens. J. 2008, 8, 1900–1921. [Google Scholar] [CrossRef]
- Yue, X.; Kauer, M.; Bellanger, M.; Beard, O.; Brownlow, M.; Gibson, D.; Clark, C.; MacGregor, C.; Song, S. Development of an Indoor Photovoltaic Energy Harvesting Module for Autonomous Sensors in Building Air Quality Applications. IEEE Internet Things J. 2017, 4, 2092–2103. [Google Scholar] [CrossRef]
- Magno, M.; Boyle, D.; Brunelli, D.; O’Flynn, B.; Popovici, E.; Benini, L. Extended Wireless Monitoring Through Intelligent Hybrid Energy Supply. IEEE Trans. Ind. Electron. 2014, 61, 1871–1881. [Google Scholar] [CrossRef]
- Magno, M.; Kneubühler, D.; Mayer, P.; Benini, L. Micro Kinetic Energy Harvesting for Autonomous Wearable Devices. In Proceedings of the 2018 International Symposium on Power Electronics, Electrical Drives, Automation and Motion, Amalfi, Italy, 20–22 June 2018; pp. 105–110. [Google Scholar] [CrossRef]
- Magno, M.; Sigrist, L.; Gomez, A.; Cavigelli, L.; Libri, A.; Popovici, E.; Benini, L. SmarTEG: An Autonomous Wireless Sensor Node for High Accuracy Accelerometer-Based Monitoring. Sensors 2019, 19, 2747. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Verma, G.; Sharma, V. A Novel Thermoelectric Energy Harvester for Wireless Sensor Network Application. IEEE Trans. Ind. Electron. 2019, 66, 3530–3538. [Google Scholar] [CrossRef]
- Ma, Y.; Ji, Q.; Chen, S.; Song, G. An experimental study of ultra-low power wireless sensor-based autonomous energy harvesting system. J. Renew. Sustain. Energy 2017, 9. [Google Scholar] [CrossRef]
- Hayashi, H.; Ueda, T. Requirements and considerations of energy harvesting for industrial wireless transmitter. In Proceedings of the SICE Annual Conference, Akita, Japan, 20–23 August 2012; pp. 1414–1415. [Google Scholar]
- Viehweger, C.; Keutel, T.; Kanoun, O. Energy harvesting for wireless sensor nodes in factory environments. In Proceedings of the IEEE 11th International Multi-Conference on Systems, Signals & Devices, Barcelona, Spain, 11–14 February 2014; pp. 1–4. [Google Scholar] [CrossRef]
- Kim, S.; Vyas, R.; Bito, J.; Niotaki, K.; Collado, A.; Georgiadis, A.; Tentzeris, M.M. Ambient RF Energy-Harvesting Technologies for Self-Sustainable Standalone Wireless Sensor Platforms. Proc. IEEE 2014, 102, 1649–1666. [Google Scholar] [CrossRef]
- Berger, A.; Hörmann, L.B.; Leitner, C.; Oswald, S.B.; Priller, P.; Springer, A. Sustainable energy harvesting for robust wireless sensor networks in industrial applications. In Proceedings of the IEEE Sensors Applications Symposium, Zadar, Croatia, 13–15 April 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Luo, B.; Wang, H.; Liu, H.; Li, B.; Peng, F. Early Fault Detection of Machine Tools Based on Deep Learning and Dynamic Identification. IEEE Trans. Ind. Electron. 2019, 66, 509–518. [Google Scholar] [CrossRef]
- Trevisan, R.; Costanzo, A. A 1-kW Contactless Energy Transfer System Based on a Rotary Transformer for Sealing Rollers. IEEE Trans. Ind. Electron. 2014, 61, 6337–6345. [Google Scholar] [CrossRef]
- He, G.; Chen, Q.; Ren, X.; Wong, S.; Zhang, Z. Modeling and Design of Contactless Sliprings for Rotary Applications. IEEE Trans. Ind. Electron. 2019, 66, 4130–4140. [Google Scholar] [CrossRef]
- Gong, C.-S.A.; Li, S.-W.; Shiue, M.-T. A Bootstrapped Comparator-Switched Active Rectifying Circuit for Wirelessly Powered Integrated Miniaturized Energy Sensing Systems. Sensors 2019, 19, 4714. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Popovic, Z. Far-field wireless power delivery and power management for low-power sensors. In Proceedings of the IEEE Wireless Power Transfer, Perugia, Italy, 15–16 May 2013; pp. 1–4. [Google Scholar] [CrossRef]
- Zannas, K.; Matbouly, H.E.; Duroc, Y.; Tedjini, S. Flipping a Coin, Heads or Tails. Flipping an RFID Tag on Metal, ETSI or FCC Bands. In Proceedings of the IEEE MTT-S International Microwave Symposium, Boston, MA, USA, 2–7 June 2019; pp. 283–285. [Google Scholar] [CrossRef]
- Clerckx, B.; Zhang, R.; Schober, R.; Ng, D.W.K.; Kim, D.I.; Poor, H.V. Fundamentals of Wireless Information and Power Transfer: From RF Energy Harvester Models to Signal and System Designs. IEEE J. Sel. Areas Commun. 2019, 37, 4–33. [Google Scholar] [CrossRef] [Green Version]
- Ji, L.; Wang, L.; Liao, C.; Li, S. Simultaneous Wireless Power and Bidirectional Information Transmission With a Single-Coil, Dual-Resonant Structure. IEEE Trans. Ind. Electron. 2019, 66, 4013–4022. [Google Scholar] [CrossRef]
- Brás, L.; Oliveira, M.; de Carvalho, N.B.; Pinho, P. Low power location protocol based on ZigBee Wireless Sensor Networks. In Proceedings of the 2010 International Conference on Indoor Positioning and Indoor Navigation, Zurich, Switzerland, 15–17 September 2010; pp. 1–7. [Google Scholar] [CrossRef]
- Paolini, G.; Shanawani, M.; Costanzo, A.; Benassi, F.; Masotti, D. RF Energy On-Demand for Automotive Applications. In Proceedings of the IEEE/MTT-S International Microwave Symposium, Los Angeles, CA, USA, 4–6 August 2020; pp. 1191–1194. [Google Scholar] [CrossRef]
- Sharma, P.; Gupta, K. Analysis and optimized design of single feed circularly polarized microstrip antennas. IEEE Trans. Antennas Propag. 1983, 31, 949–955. [Google Scholar] [CrossRef] [Green Version]
- Del Prete, M.; Costanzo, A.; Georgiadis, A.; Collado, A.; Masotti, D.; Popović, Z. A 2.45-GHz Energy-Autonomous Wireless Power Relay Node. IEEE Trans. Microw. Theory Tech. 2015, 63, 4511–4520. [Google Scholar] [CrossRef] [Green Version]
- Masotti, D.; Costanzo, A.; Francia, P.; Filippi, M.; Romani, A. A Load-Modulated Rectifier for RF Micropower Harvesting With Start-Up Strategies. IEEE Trans. Microw. Theory Tech. 2014, 62, 994–1004. [Google Scholar] [CrossRef]
- Tang, X.; Wang, X.; Cattley, R.; Gu, F.; Ball, A.D. Energy Harvesting Technologies for Achieving Self-Powered Wireless Sensor Networks in Machine Condition Monitoring: A Review. Sensors 2018, 18, 4113. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Popovic, Z.; Falkenstein, E.A.; Costinett, D.; Zane, R. Low-Power Far-Field Wireless Powering for Wireless Sensors. Proc. IEEE 2013, 101, 1397–1409. [Google Scholar] [CrossRef]
- Sung, G.-M.; Chung, C.-K.; Lai, Y.-J.; Syu, J.-Y. Small-Area Radiofrequency-Energy-Harvesting Integrated Circuits for Powering Wireless Sensor Networks. Sensors 2019, 19, 1754. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- La Rosa, R.; Livreri, P.; Trigona, C.; Di Donato, L.; Sorbello, G. Strategies and techniques for powering wireless sensor nodes through energy harvesting and wireless power transfer. Sensors 2019, 19, 2660. [Google Scholar] [CrossRef] [PubMed] [Green Version]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component | Energy |
|---|---|
| MCU (400 SPS) | 380 μJ |
| MCU (1600 SPS) | 510 μJ |
| IMU (400 SPS) | 265 μJ |
| IMU (1600 SPS) | 275 μJ |
| LoRa Transceiver | 405 μJ |
| Real Time Clock | 13.2 μJ |
| Decoupling Caps (estimate) | 70 μJ |
| Illuminator–Node Distance | VOPEN | RLOAD @ VOPEN/2 |
|---|---|---|
| 30 cm | 3.24 V | 7.58 kΩ |
| 40 cm | 2.12 V | 10.43 kΩ |
| 60 cm | 1.58 V | 12.38 kΩ |
| 80 cm | 0.92 V | 9.40 kΩ |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Paolini, G.; Guermandi, M.; Masotti, D.; Shanawani, M.; Benassi, F.; Benini, L.; Costanzo, A. RF-Powered Low-Energy Sensor Nodes for Predictive Maintenance in Electromagnetically Harsh Industrial Environments. Sensors 2021, 21, 386. https://doi.org/10.3390/s21020386
Paolini G, Guermandi M, Masotti D, Shanawani M, Benassi F, Benini L, Costanzo A. RF-Powered Low-Energy Sensor Nodes for Predictive Maintenance in Electromagnetically Harsh Industrial Environments. Sensors. 2021; 21(2):386. https://doi.org/10.3390/s21020386
Chicago/Turabian StylePaolini, Giacomo, Marco Guermandi, Diego Masotti, Mazen Shanawani, Francesca Benassi, Luca Benini, and Alessandra Costanzo. 2021. "RF-Powered Low-Energy Sensor Nodes for Predictive Maintenance in Electromagnetically Harsh Industrial Environments" Sensors 21, no. 2: 386. https://doi.org/10.3390/s21020386
APA StylePaolini, G., Guermandi, M., Masotti, D., Shanawani, M., Benassi, F., Benini, L., & Costanzo, A. (2021). RF-Powered Low-Energy Sensor Nodes for Predictive Maintenance in Electromagnetically Harsh Industrial Environments. Sensors, 21(2), 386. https://doi.org/10.3390/s21020386