Modeling of a Soft-Rigid Gripper Actuated by a Linear-Extension Soft Pneumatic Actuator




Abstract
1. Introduction
2. Soft-Rigid Gripper Using a Linear-Extension Soft Pneumatic Actuator
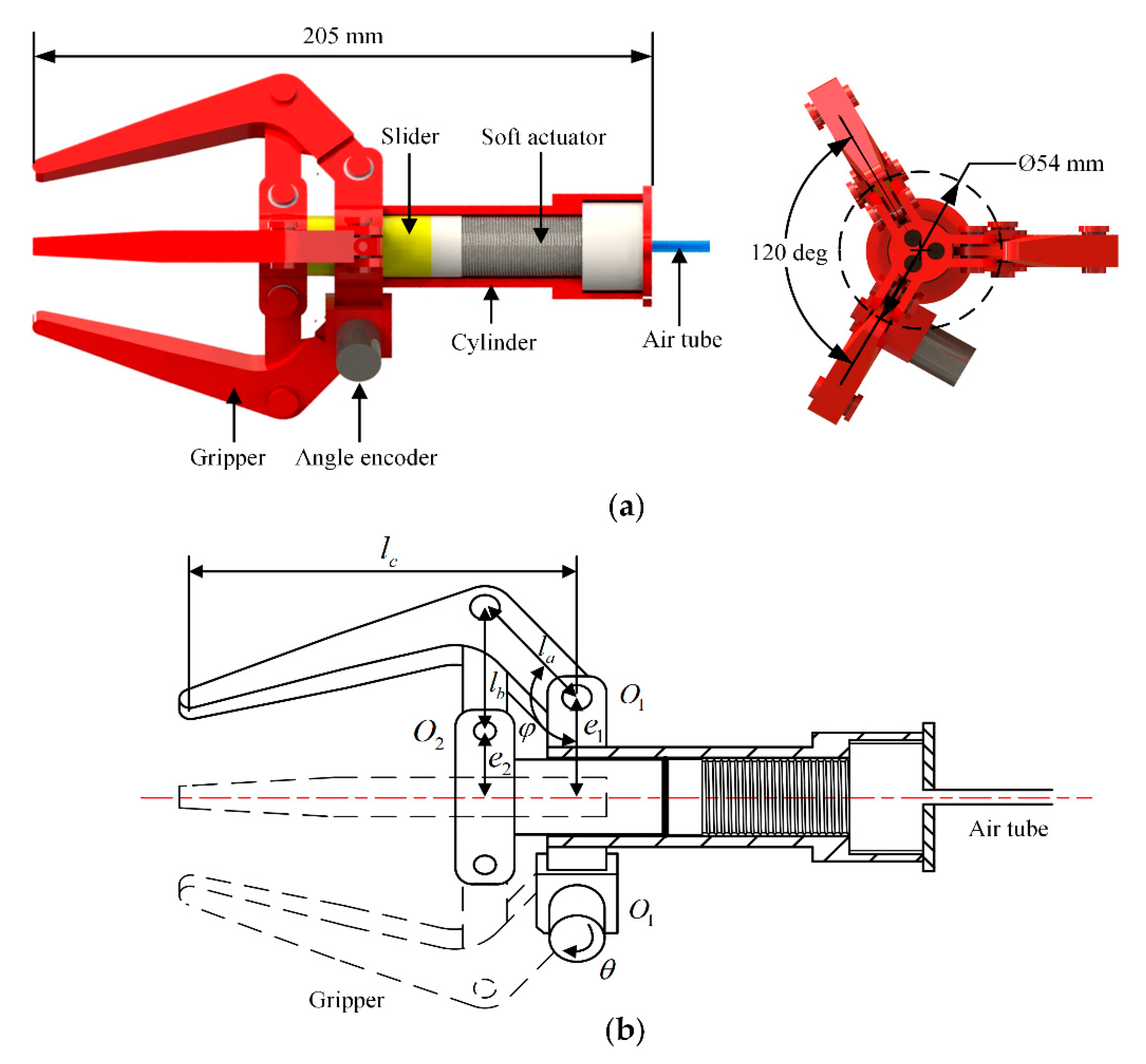
2.1. Soft-Rigid Gripper
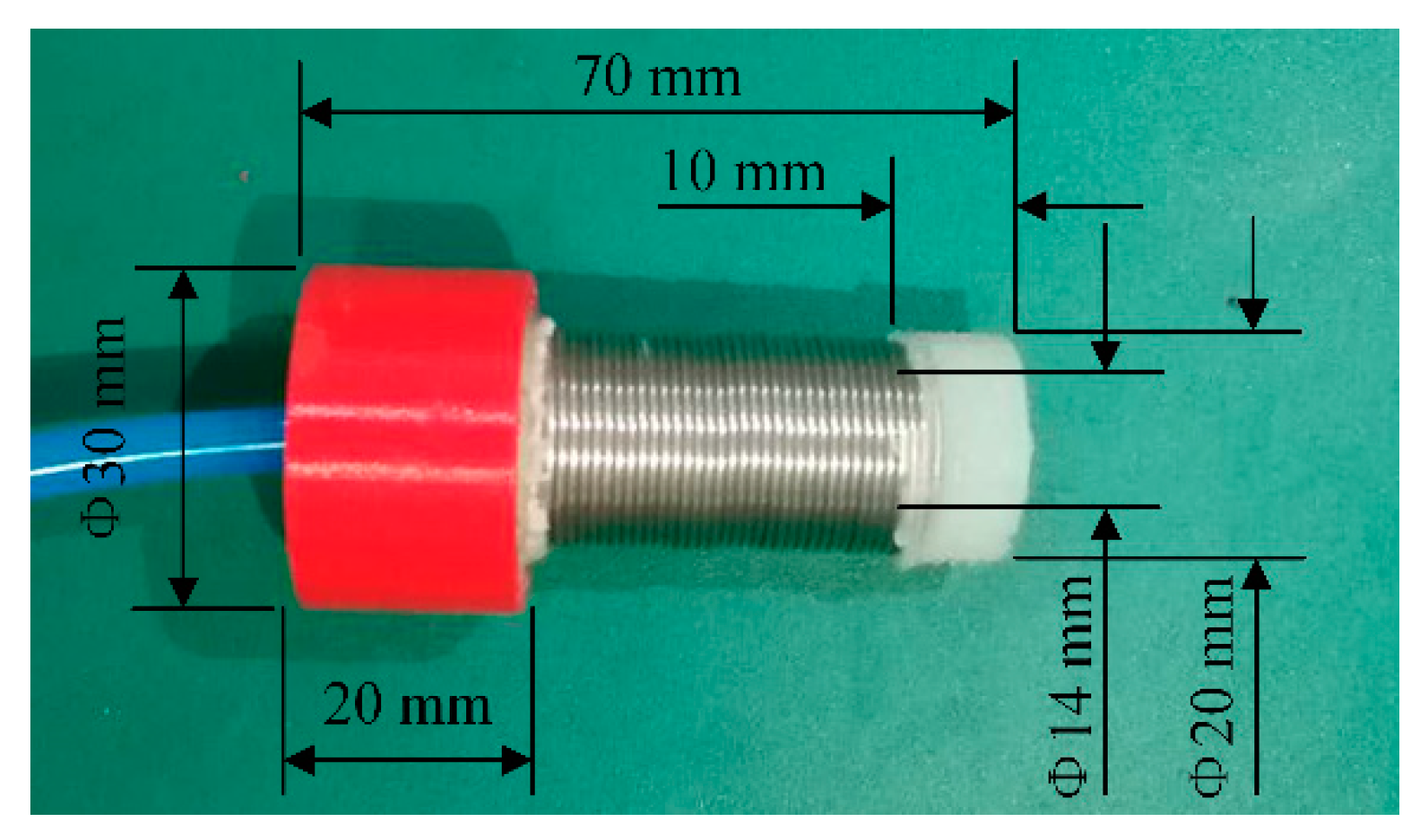
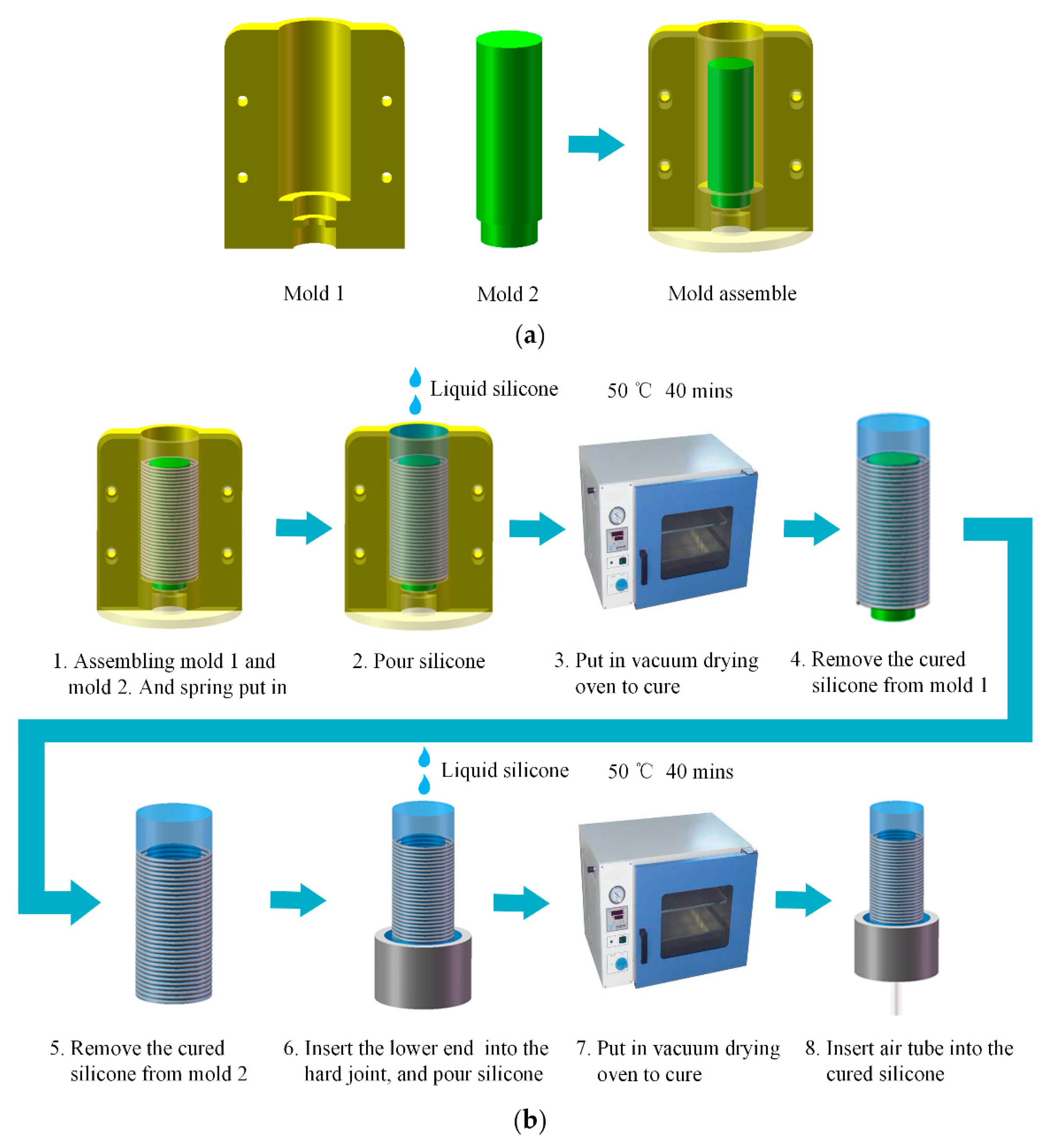
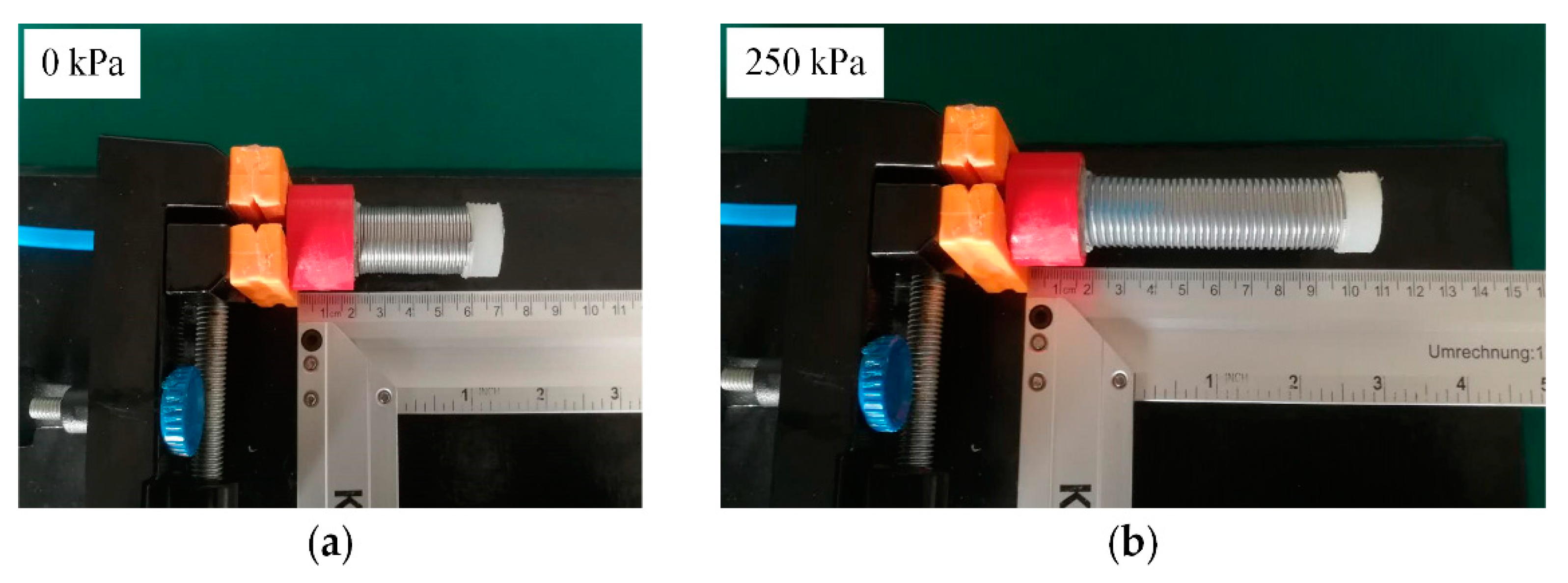
2.2. Development of the Linear-Extension Soft Pneumatic Actuator
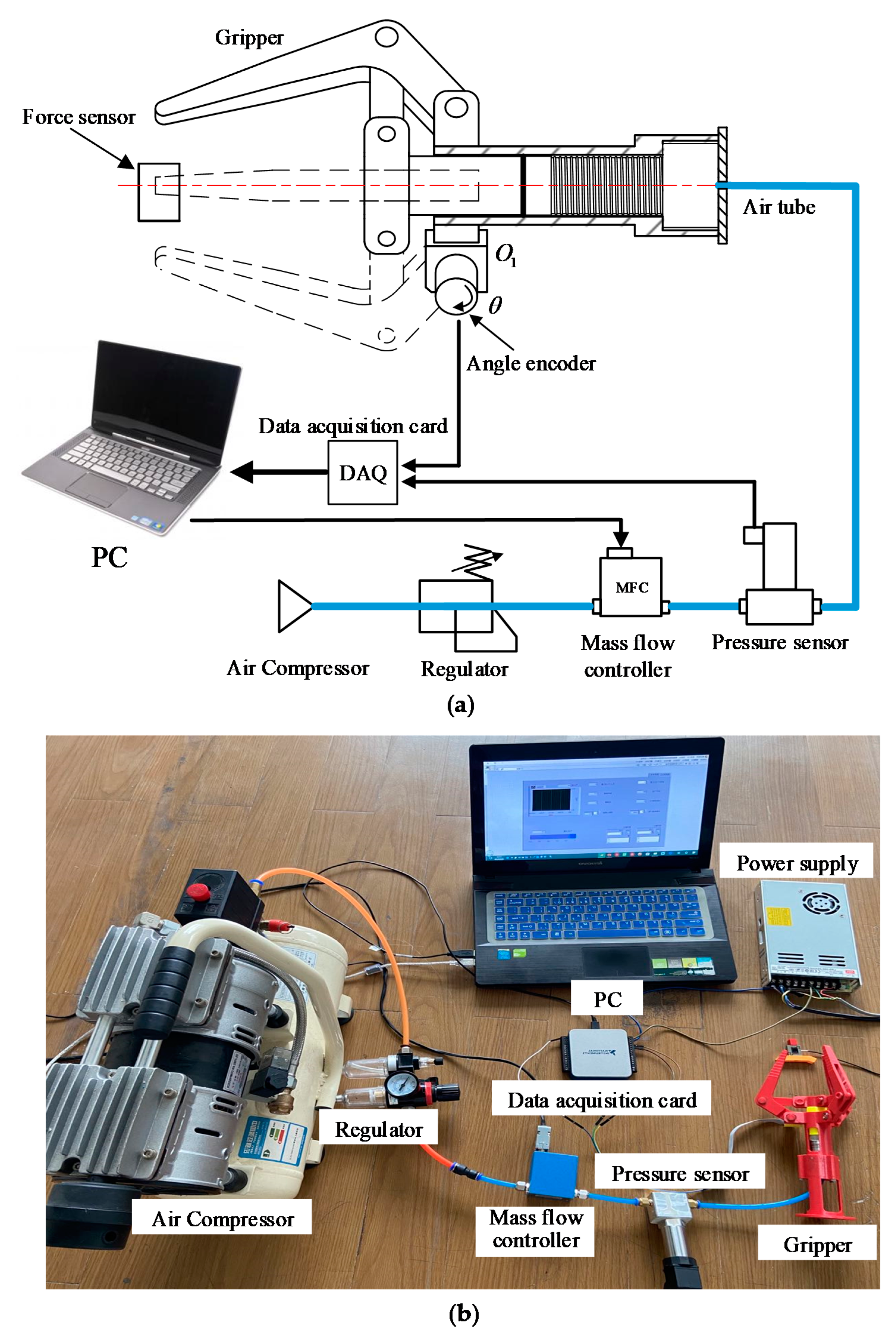
3. Control and Measurement System
3.1. Experiment Apparatus
3.2. Control Method
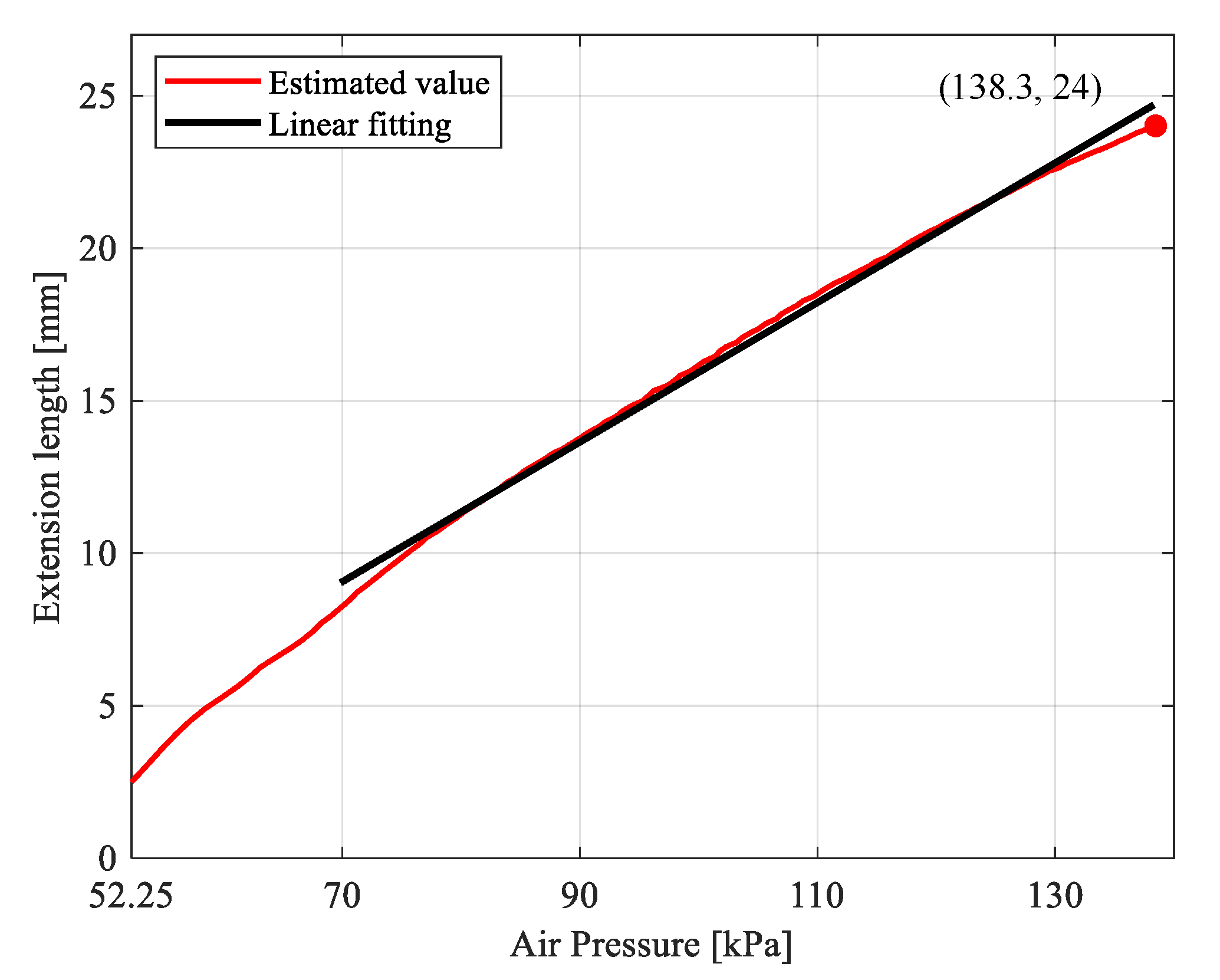
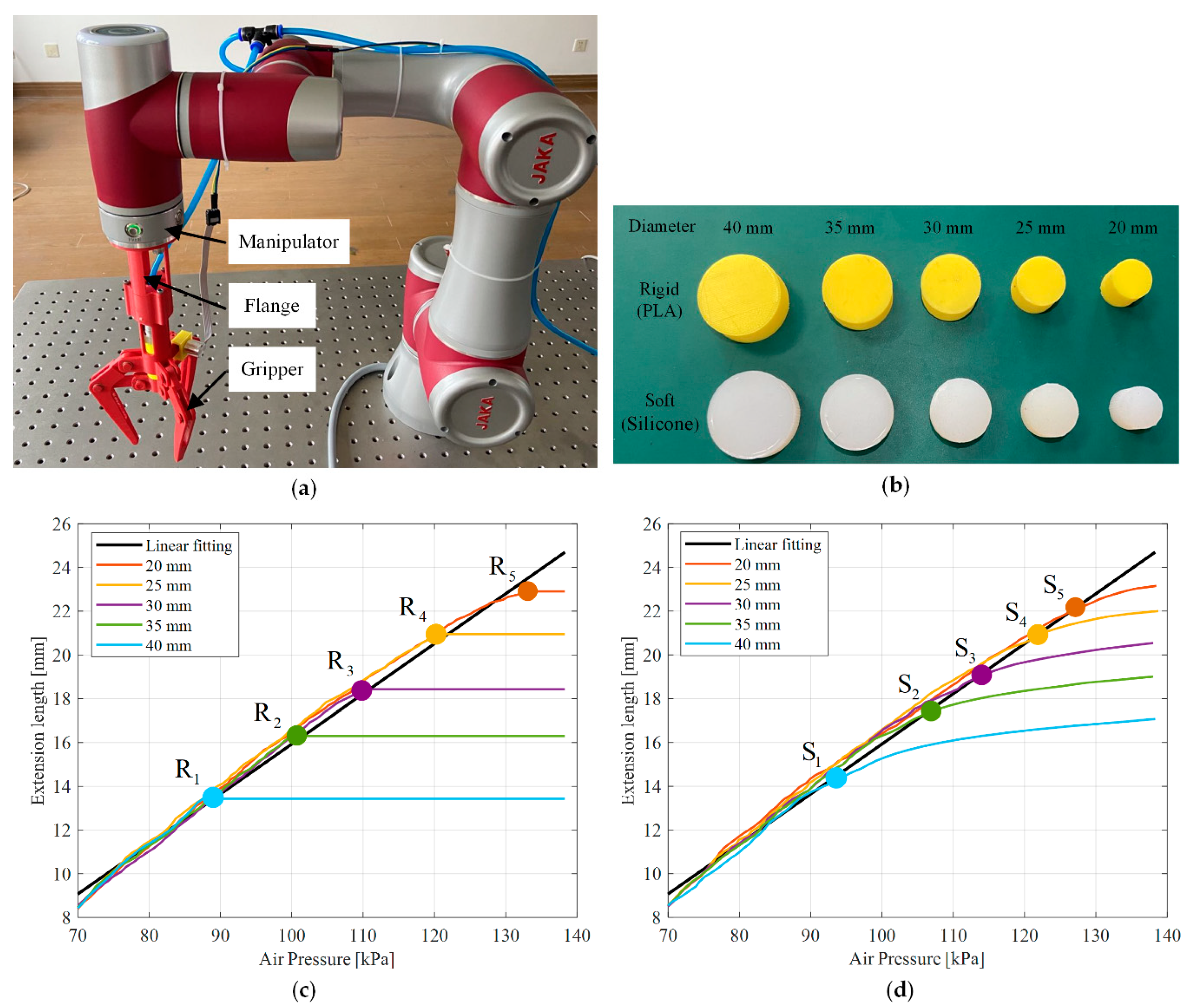
4. Characteristics of the Gripper
5. Validation Experiments
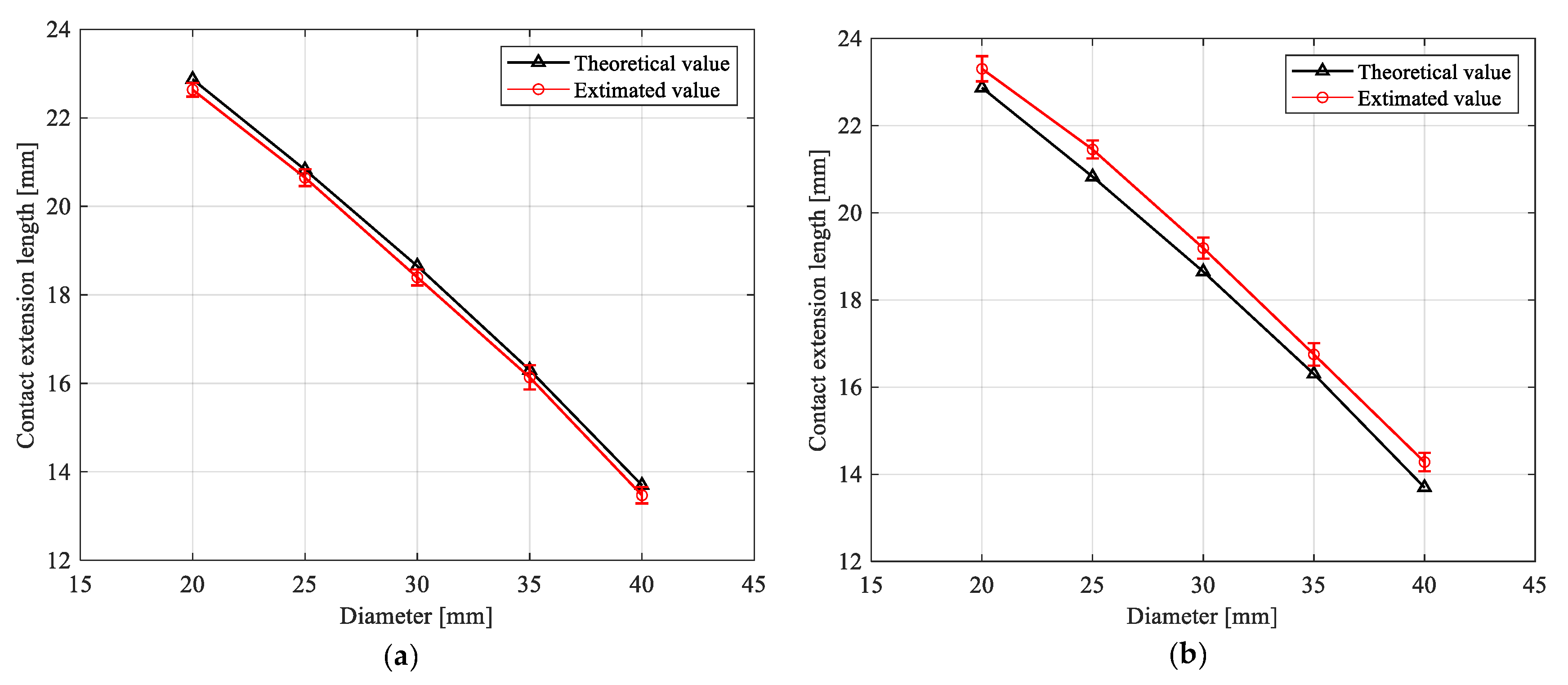
5.1. Contact State Estimation
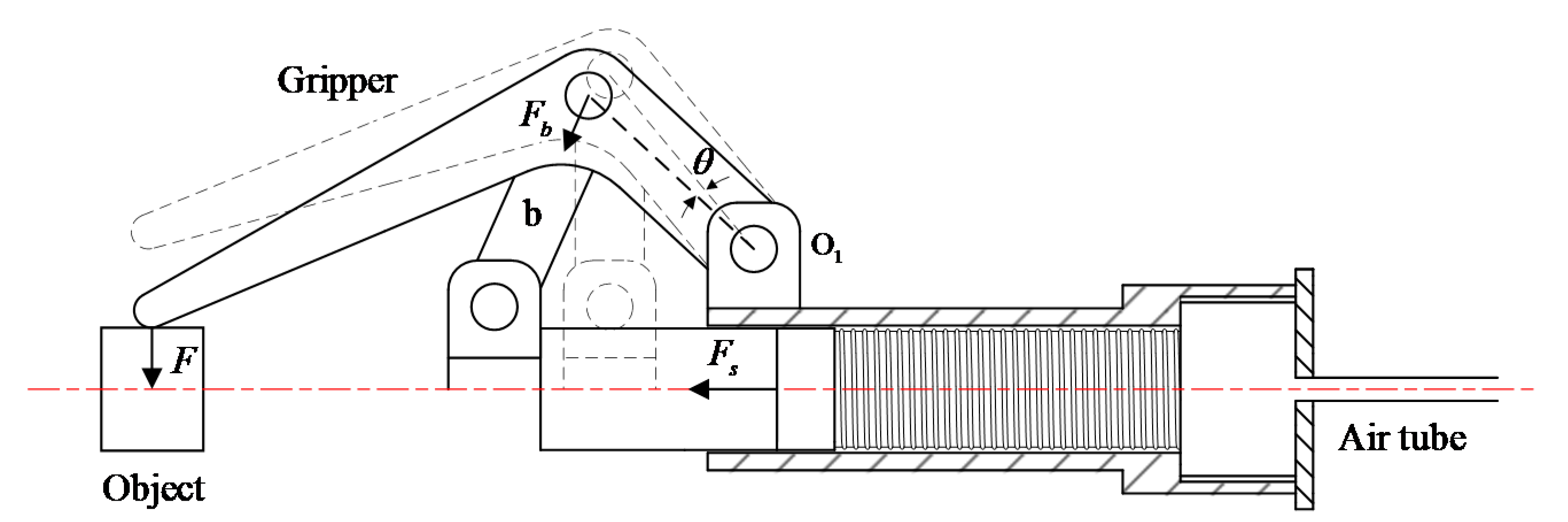
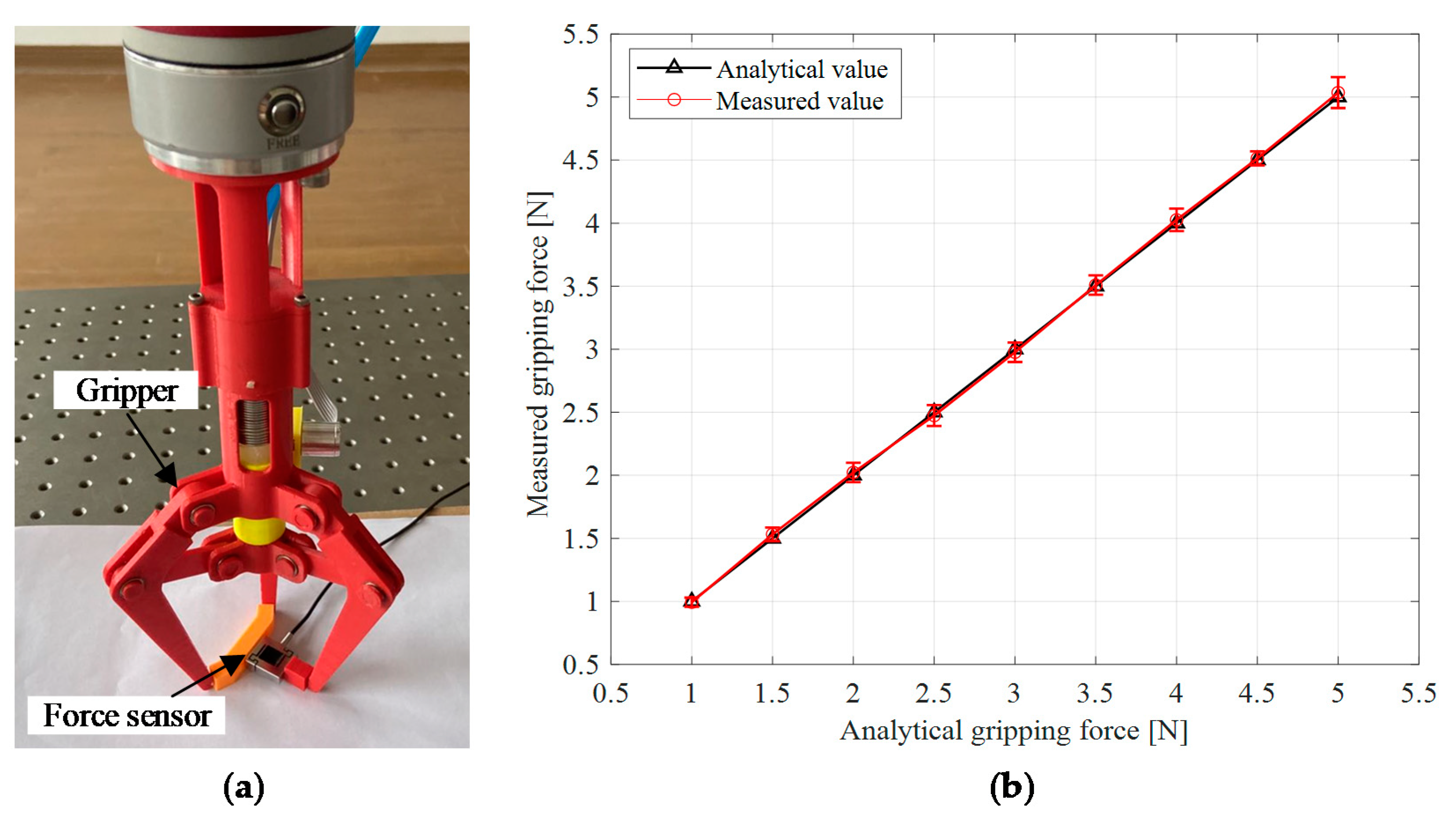
5.2. Gripping Force Analysis
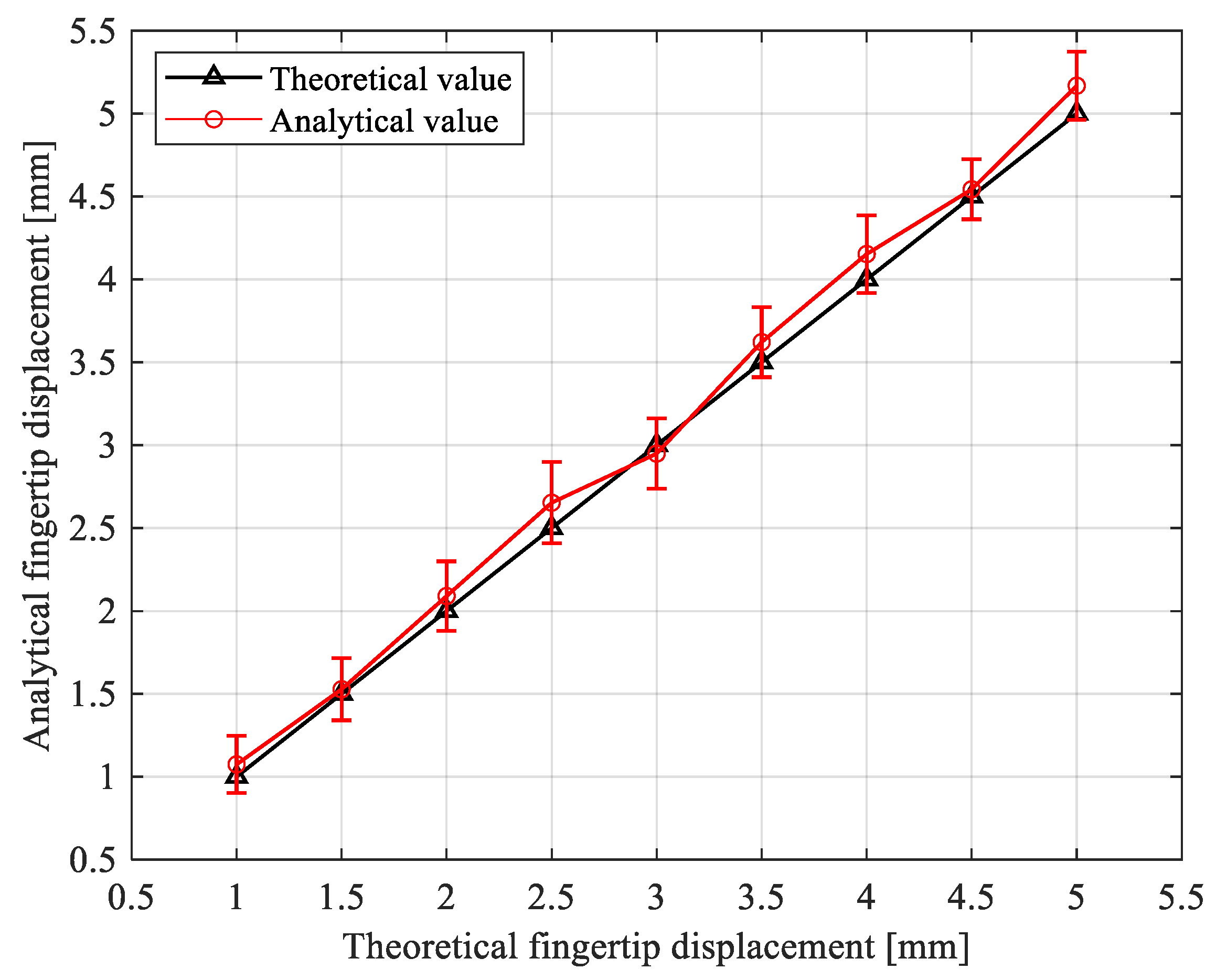
5.3. Fingertip Displacement Analysis
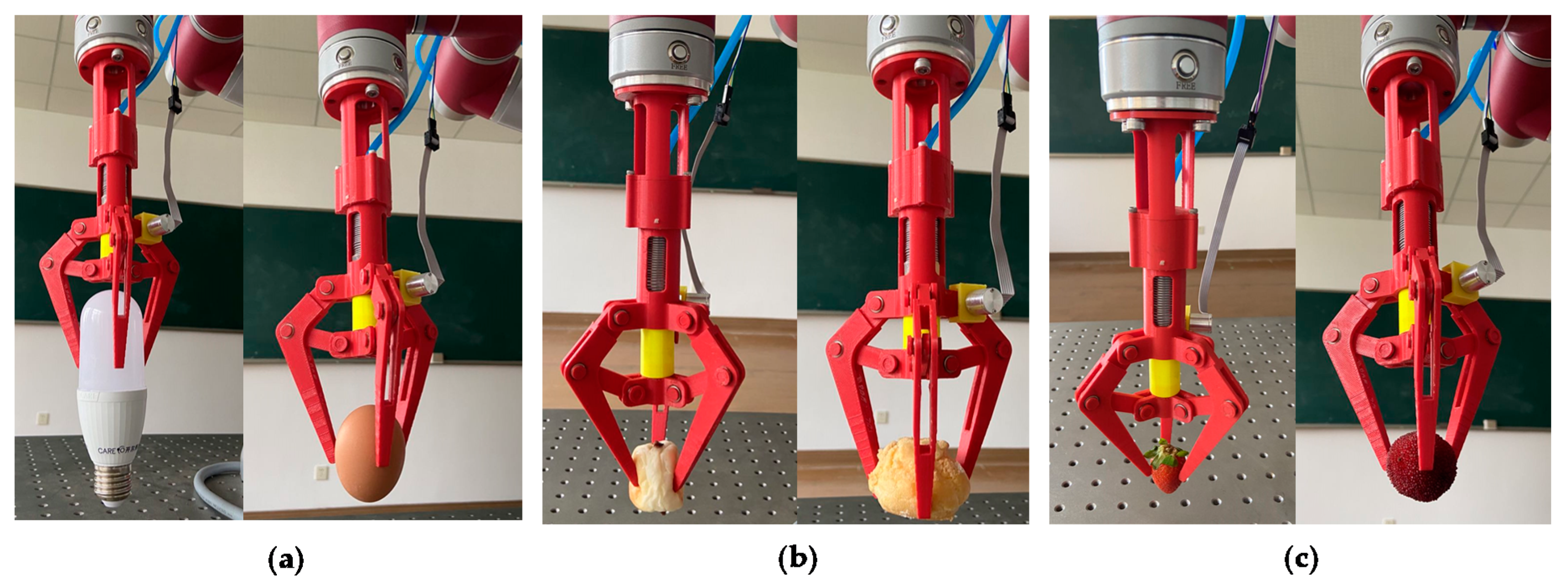
5.4. Static Gripping Test
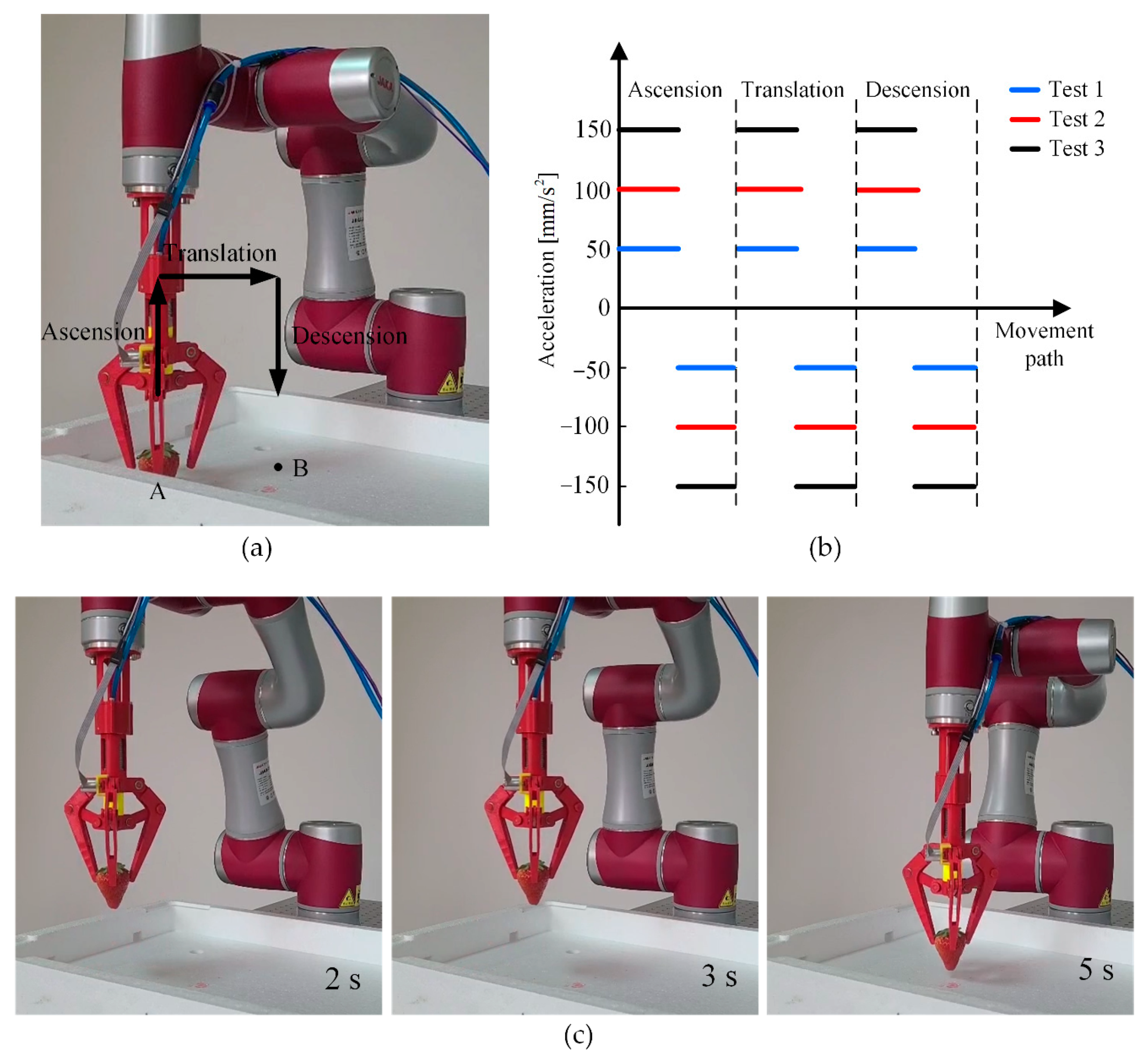
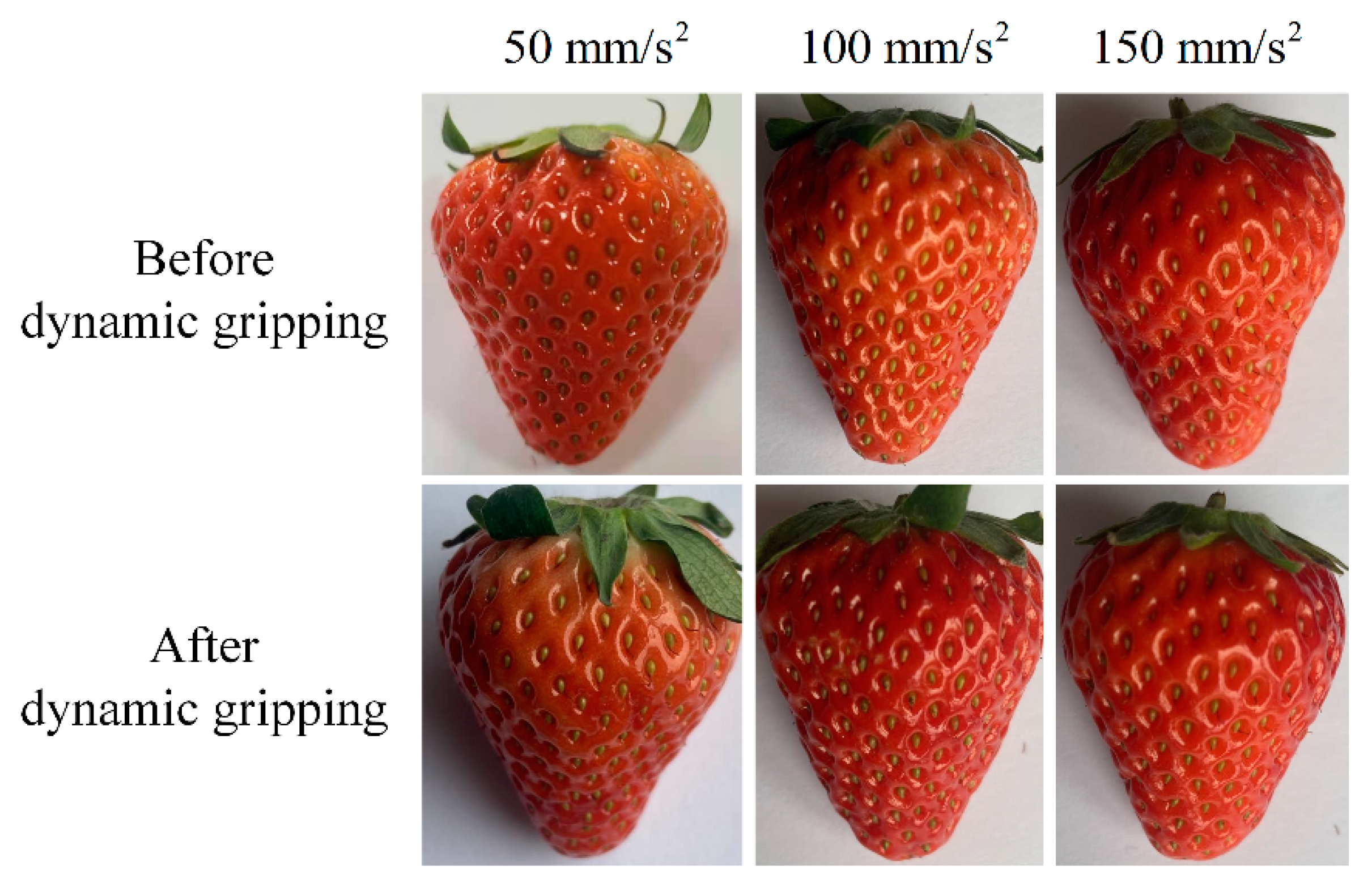
5.5. Dynamic Gripping Test
6. Conclusions and Future Work
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| Contact pressure | Pressure of the soft actuator when the fingers are in contact with the object |
| Contact extension length | Extension length of the soft actuator when the fingers are in contact with the object |
| Theoretical contact extension length | Theoretical value of the contact extension length |
| Estimated contact extension length | Estimated value of the contact extension length |
| Contact angle | Rotation angle of the hinge when the fingers are in contact with the object |
| Theoretical contact angle | Theoretical value of the contact angle |
| Estimated contact angle | Estimated value of the contact angle |
| Analytical gripping force | Analytical value of the gripping force calculated by Equation (6) |
| Fingertip displacement | Displacement of the fingertip deep-going into the object surface |
| Analytical fingertip displacement | Analytical value of the fingertip displacement calculated by Equation (8) |
| Theoretical fingertip displacement | Accurate value of the fingertip displacement |
References
- Huang, S.J.; Chang, W.; Su, J.-Y. Intelligent robotic gripper with adaptive grasping force. Int. J. Control. Autom. 2017, 15, 2272–2282. [Google Scholar] [CrossRef]
- Mura, D.; Barbarossa, M.; Dinuzzi, G.; Grioli, G.; Caiti, A.; Catalano, M.G. A soft modular end effector for underwater manipulation: A gentle, adaptable grasp for the ocean depths. IEEE Robot. Autom. Mag. 2018, 25, 45–56. [Google Scholar] [CrossRef]
- Galloway, K.C.; Becker, K.P.; Phillips, B.; Kirby, J.; Licht, S.; Tchernov, D.; Wood, R.J.; Gruber, D.F. Soft robotic grippers for biological sampling on deep reefs. Soft Robot. 2016, 3, 23–33. [Google Scholar] [CrossRef]
- Tanaka, M.; Tadakuma, K.; Nakajima, M.; Fujita, M. Task-Space control of articulated mobile robots with a soft gripper for operations. IEEE Trans. Robot. 2019, 35, 135–146. [Google Scholar] [CrossRef]
- Zhong, G.; Hou, Y.; Dou, W. A soft pneumatic dexterous gripper with convertible grasping modes. Int. J. Mech. Sci. 2019, 153, 445–456. [Google Scholar] [CrossRef]
- Shintake, J.; Rosset, S.; Schubert, B.; Floreano, D.; Shea, H. Versatile soft grippers with intrinsic electroadhesion based on multifunctional polymer actuators. Adv. Mater. 2016, 28, 231–238. [Google Scholar] [CrossRef]
- Ohkura, S.; Shinohira, D.; Yoshida, T.; Kanno, T.; Miyazaki, T.; Kawase, T.; Kawashima, K. Development of three-fingered end-effector using pneumatic soft actuators. In Proceedings of the 2019 IEEE/SICE International Symposium on System Integration (SII), Paris, France, 14–16 January 2019; IEEE: New York, NY, USA, 2019; pp. 701–706. [Google Scholar]
- Sun, Y.; Zhang, Q.; Chen, X. Design and analysis of a flexible robotic hand with soft fingers and a changeable palm. Adv. Robot. 2020, 34, 1041–1054. [Google Scholar] [CrossRef]
- Liu, Z.; Wang, Y.; Ren, Y.; Jin, G.; Zhang, C.; Chen, W.; Yan, F. Poly (ionic liquid) hydrogel-based anti-freezing ionic skin for a soft robotic gripper. Mater. Horiz. 2020, 7, 919–927. [Google Scholar] [CrossRef]
- Zhang, H.; Kumar, A.S.; Fuh, J.Y.H.; Wang, M.Y. Design and development of a topology-optimized three-dimensional printed soft gripper. Soft Robot. 2018, 5, 650–661. [Google Scholar] [CrossRef] [PubMed]
- Tawk, C.; Gillett, A.; Panhuis, M.i.h.; Spinks, G.M.; Alici, G. A 3D-Printed Omni-Purpose Soft Gripper. IEEE Trans. Robot. 2019, 35, 1268–1275. [Google Scholar] [CrossRef]
- Zhu, G.; Xiao, X.; Li, C.; Ma, J.; Ponraj, G.; Prituja, A.V.; Ren, H. A bimanual robotic teleoperation architecture with anthropomorphic hybrid grippers for unstructured manipulation tasks. Appl. Sci. 2020, 10, 2086. [Google Scholar] [CrossRef]
- Haibin, Y.; Cheng, K.; Junfeng, L.; Guilin, Y. Modeling of grasping force for a soft robotic gripper with variable stiffness. Mech. Mach. Theory 2018, 128, 254–274. [Google Scholar] [CrossRef]
- Akbari, S.; Sakhaei, A.H.; Panjwani, S.; Kowsari, K.; Serjouei, A.; Ge, Q. Multimaterial 3D printed soft actuators powered by shape memory alloy wires. Sensors Actuators A Phys. 2019, 290, 177–189. [Google Scholar] [CrossRef]
- Chen, F.; Liu, K.; Wang, Y.; Zou, J.; Gu, G.; Zhu, X. Automatic design of soft dielectric elastomer actuators with optimal spatial electric fields. IEEE Trans. Robot. 2019, 35, 1150–1165. [Google Scholar] [CrossRef]
- Youn, J.; Jeong, S.M.; Hwang, G.; Kim, H.; Hyeon, K.; Park, J.; Kyung, K. Dielectric elastomer actuator for soft robotics applications and challenges. Appl. Sci. 2020, 10, 640. [Google Scholar] [CrossRef]
- Yoon, C. Advances in biomimetic stimuli responsive soft grippers. Nano Converg. 2019, 6, 20. [Google Scholar] [CrossRef]
- Kobayashi, K.; Yoon, C.; Oh, S.H.; Pagaduan, J.V.; Gracias, D.H. Biodegradable thermomagnetically responsive soft untethered grippers. ACS Appl. Mater. Inter. 2019, 11, 151–159. [Google Scholar] [CrossRef]
- Miron, G.; Bédard, B.; Plante, J.-S. Sleeved bending actuators for soft grippers: A durable solution for high force-to-weight applications. Actuators 2018, 7, 40. [Google Scholar] [CrossRef]
- Wang, Z.; Polygerinos, P.; Overvelde, J.T.B.; Galloway, K.C.; Bertoldi, K.; Walsh, C.J. Interaction forces of soft fiber reinforced bending actuators. IEEE ASME Trans. Mech. 2017, 22, 717–727. [Google Scholar] [CrossRef]
- Wang, Z.; Wang, D.; Zhang, Y.; Liu, J.; Wen, L.; Xu, W.; Zhang, Y. A three-fingered force feedback glove using fiber-reinforced soft bending actuators. IEEE Trans. Ind. Electron. 2020, 67, 7681–7690. [Google Scholar] [CrossRef]
- Chen, W.; Xiong, C.; Liu, C.; Li, P.; Chen, Y. Fabrication and dynamic modeling of bidirectional bending soft actuator integrated with optical waveguide curvature sensor. Soft Robot. 2019, 6, 495–506. [Google Scholar] [CrossRef] [PubMed]
- Hao, Y.; Gong, Z.; Xie, Z.; Guan, S.; Yang, X.; Wang, T.; Wen, L. A soft bionic gripper with variable effective length. J. Bionic Eng. 2018, 15, 220–235. [Google Scholar] [CrossRef]
- Nassour, J. Marionette-based programming of a soft textile inflatable actuator. Sens. Actuators A Phys. 2019, 291, 93–98. [Google Scholar] [CrossRef]
- Zhou, J.; Chen, S.; Wang, Z. A soft-robotic gripper with enhanced object adaptation and grasping reliability. IEEE Robot. Autom. Lett. 2017, 2, 2287–2293. [Google Scholar] [CrossRef]
- Liu, S.; Wang, F.; Liu, Z.; Zhang, W.; Tian, Y.; Zhang, D. A two-finger soft-robotic gripper with enveloping and pinching grasping modes. IEEE ASME Trans. Mech. 2020, 1, 1. [Google Scholar] [CrossRef]
- Li, H.; Yao, J.; Zhou, P.; Chen, X.; Xu, Y.; Zhao, Y. High-load soft grippers based on bionic winding effect. Soft Robot. 2019, 6, 276–288. [Google Scholar] [CrossRef]
- Elgeneidy, K.; Liu, P.; Pearson, S.; Lohse, N.; Neumann, G. Printable soft grippers with integrated bend sensing for handling of crops. In Proceedings of the 19th Annual Conference on Towards Autonomous Robotics, TAROS 2018, Bristol, UK, 25–27 July 2018; Springer: Cham, Switzerland, 2018; pp. 479–480. [Google Scholar]
- Yang, Y.; Chen, Y. Innovative design of embedded pressure and position sensors for soft actuators. IEEE Robot. Autom. Lett. 2018, 3, 656–663. [Google Scholar] [CrossRef]
- Elgeneidy, K.; Neumann, G.; Pearson, S.; Jackson, M.; Lohse, N. Contact detection and size estimation using a modular soft Gripper with embedded flex sensors. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; IEEE: New York, NY, USA, 2018; pp. 498–503. [Google Scholar]
- Elgeneidy, K.; Lohse, N.; Jackson, M. Bending angle prediction and control of soft pneumatic actuators with embedded flex sensors—A data-driven approach. Mechatronics 2018, 50, 234–247. [Google Scholar] [CrossRef]
- Nassour, J.; Amirabadi, H.G.; Weheabby, S.; Ali, A.A.; Lang, H.; Hamker, F. A Robust Data-Driven Soft Sensory Glove for Human Hand Motions Identification and Replication. IEEE Sens. J. 2020, 20, 12972–12979. [Google Scholar] [CrossRef]
- Thuruthel, T.G.; Shih, B.; Laschi, C.; Tolley, M.T. Soft robot perception using embedded soft sensors and recurrent neural networks. Sci. Robot. 2019, 4, eaav1488. [Google Scholar] [CrossRef]
- Park, J.; Heo, P.; Kim, J.; Na, Y. A finger grip force sensor with an open-pad structure for glove-type assistive devices. Sensors 2020, 20, 4. [Google Scholar] [CrossRef] [PubMed]
- Li, S.; Zhao, H.; Shepherd, R.F. Flexible and stretchable sensors for fluidic elastomer actuated soft robots. MRS Bull. 2017, 42, 138–142. [Google Scholar] [CrossRef]
- Liu, J.; Liu, M.; Bai, Y.; Zhang, J.; Liu, H.; Zhu, W. Recent progress in flexible wearable sensors for vital sign monitoring. Sensors 2020, 20, 4009. [Google Scholar] [CrossRef] [PubMed]
- Cai, G.; Yang, M.; Xu, Z.; Liu, J.; Tang, B.; Wang, X. Flexible and wearable strain sensing fabrics. Chem. Eng. J. 2017, 325, 396–403. [Google Scholar] [CrossRef]
- Dwivedi, A.; Ramakrishnan, A.; Reddy, A.; Patel, K.; Ozel, S.; Onal, C.D. Design, modeling, and validation of a soft magnetic 3-D force sensor. IEEE Sens. J. 2018, 18, 3852–3863. [Google Scholar] [CrossRef]
- Mirzanejad, H.; Agheli, M. Soft force sensor made of magnetic powder blended with silicone rubber. Sensor. Actuators A Phys. 2019, 293, 108–118. [Google Scholar] [CrossRef]
- Tawk, C.; Alici, G. Finite element modeling in the design process of 3D printed pneumatic soft actuators and sensors. Robotics 2020, 9, 52. [Google Scholar] [CrossRef]
- Cheng, N.; Low, J.H.; Ang, B.W.; Goh, A.J.; Yeow, C.-H. Soft fabric-based pneumatic sensor for bending angles and contact force detection. IEEE Sens. J. 2018, 19, 1269–1279. [Google Scholar] [CrossRef]
- Guo, X.-Y.; Li, W.-B.; Gao, Q.-H.; Yan, H.; Fei, Y.-Q.; Zhang, W.-M. Self-locking mechanism for variable stiffness rigid-soft gripper. Smart Mater. Struct. 2020, 29, 035033. [Google Scholar] [CrossRef]
- Zhong, H.; Shen, Z.; Zhao, Y.; Tang, K.; Wang, W.; Wang, Z. A hybrid underwater manipulator system with intuitive muscle-level sEMG mapping control. IEEE Robot. Autom. Lett. 2020, 5, 3198–3205. [Google Scholar] [CrossRef]
- Takizawa, T.; Kanno, T.; Miyazaki, R.; Tadano, K.; Kawashima, K. Grasping force estimation in robotic forceps using a soft pneumatic actuator with a built-in sensor. Sens. Actuators A Phys. 2018, 271, 124–130. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Spring Parameter | Value |
|---|---|
| Material | SUS304WPB |
| Wire diameter | 1.0 mm |
| Outside diameter | 20.0 mm |
| Pitch | 1.0 mm |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cheng, P.; Jia, J.; Ye, Y.; Wu, C. Modeling of a Soft-Rigid Gripper Actuated by a Linear-Extension Soft Pneumatic Actuator. Sensors 2021, 21, 493. https://doi.org/10.3390/s21020493
Cheng P, Jia J, Ye Y, Wu C. Modeling of a Soft-Rigid Gripper Actuated by a Linear-Extension Soft Pneumatic Actuator. Sensors. 2021; 21(2):493. https://doi.org/10.3390/s21020493
Chicago/Turabian StyleCheng, Peilin, Jiangming Jia, Yuze Ye, and Chuanyu Wu. 2021. "Modeling of a Soft-Rigid Gripper Actuated by a Linear-Extension Soft Pneumatic Actuator" Sensors 21, no. 2: 493. https://doi.org/10.3390/s21020493
APA StyleCheng, P., Jia, J., Ye, Y., & Wu, C. (2021). Modeling of a Soft-Rigid Gripper Actuated by a Linear-Extension Soft Pneumatic Actuator. Sensors, 21(2), 493. https://doi.org/10.3390/s21020493