
Design, Manufacturing, and Control of a Pneumatic-Driven Passive Robotic Gait Training System for Muscle-Weakness in a Lower Limb


Abstract
:1. Introduction
- The PRPGTS is a self-designed and-manufactured gait training system. It features a PBWSS, a pneumatic postural support system, and a PGOS. The PBWSS and the pneumatic postural support system, respectively, provide weight support and postural support for a patient during gait training, and the PGOS drives the patient’s legs to follow a pre-set training gait cycle;
- The PRPGTS is a pneumatic-driven system. It can significantly reduce manufacturing costs and provide compliance force;
- The PRPGTS has approval for experimental testing on healthy individuals from the Fu Jen Catholic University Institutional Review Board (IRB);
- The IT2SFCs are designed for the PRPGTS to provide excellent robustness against uncertainties and external loads. In this paper, four interval type-2 fuzzy sliding pulse-width modulation controllers are designed to regulate the four joints of the PGOS and achieve precise and stable trajectory tracking control, and one IT2SFC is used to regulate the supporting force for the PBWSS;
- The experimental results demonstrate that the PRPGTS provides a stable control force to assist a subject in gait training and gives assist-as-needed PBWSS and pneumatic postural support system during gait training.
2. Prototype of the Pneumatic-Driven Robotic Passive Gait Training System
- the pneumatic body-weight support system (PBWSS),
- the pneumatic postural support system, and
- the pneumatic gait orthosis system (PGOS).
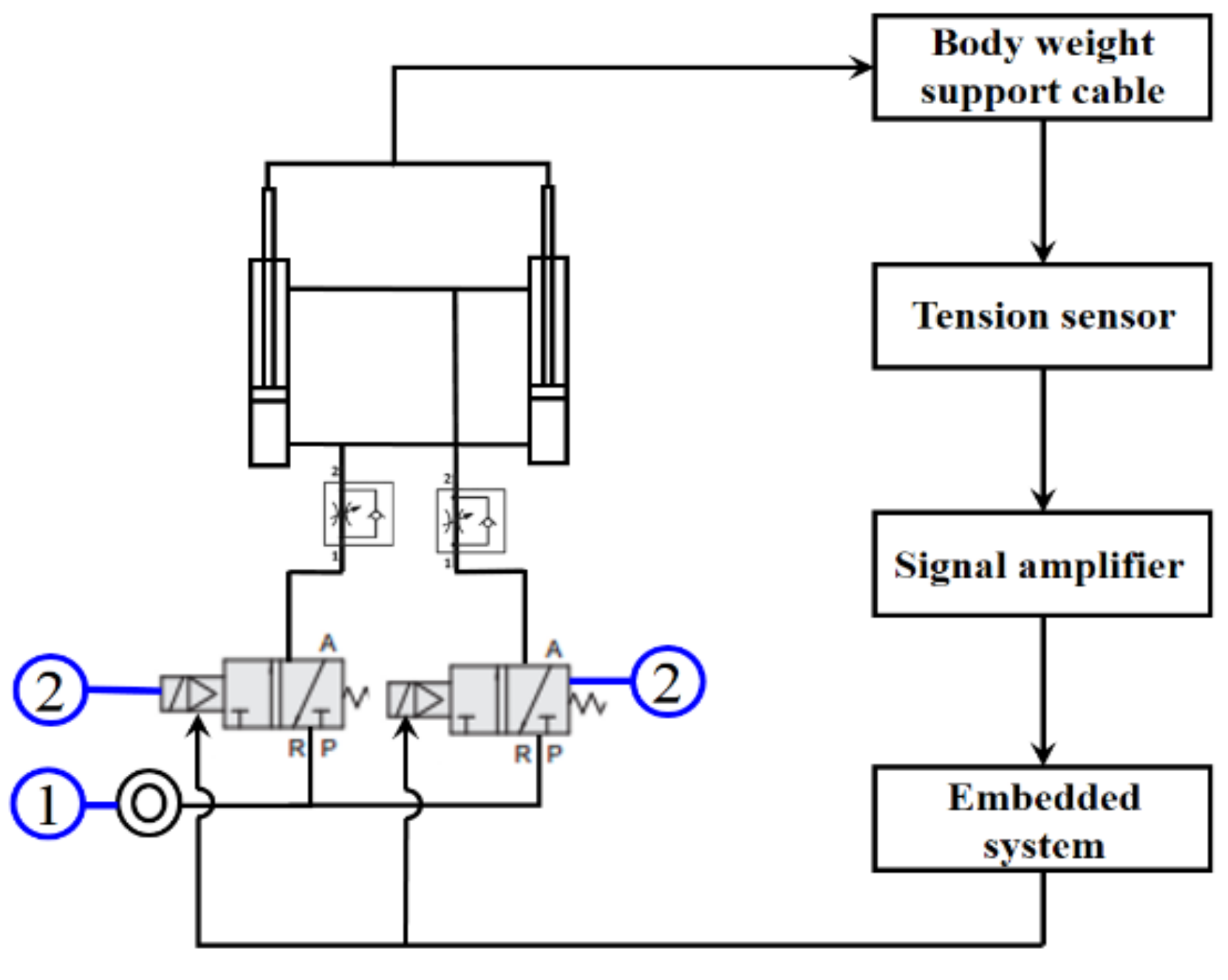
2.1. Pneumatic Body-Weight Support System
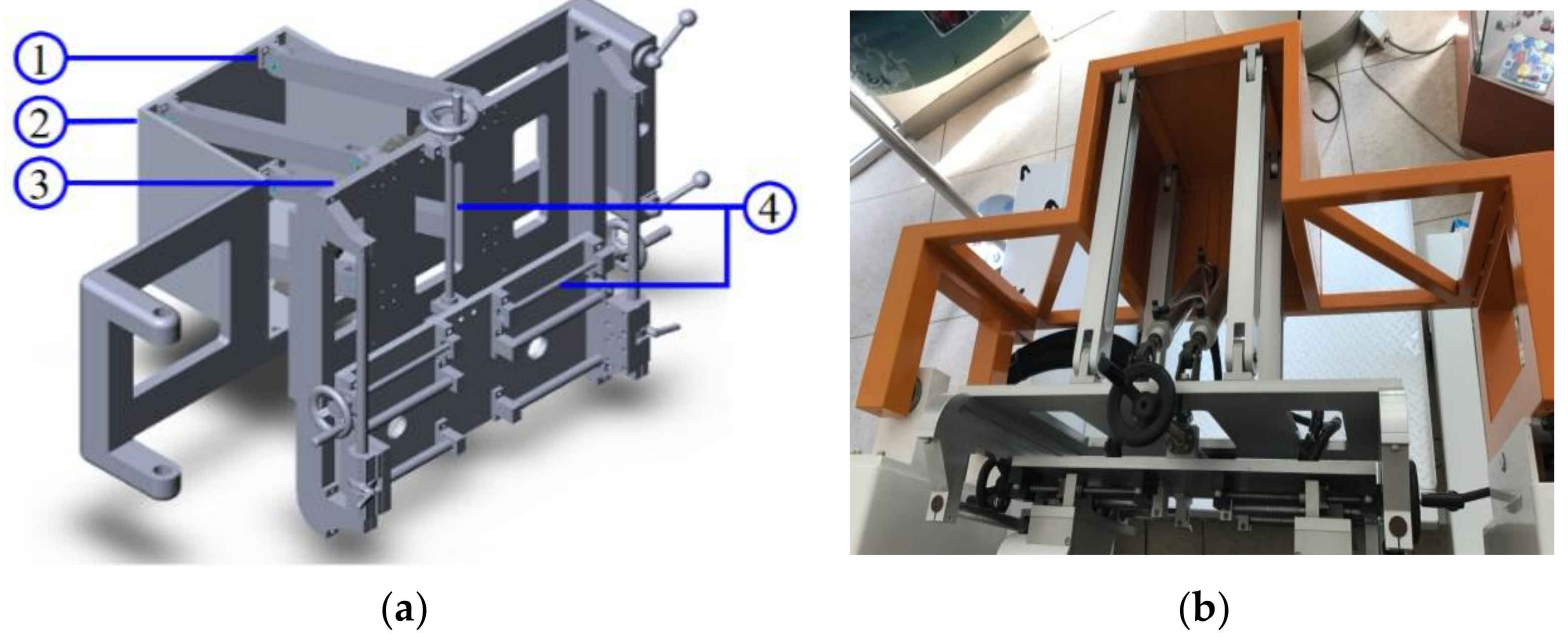
2.2. Pneumatic Postural Support System
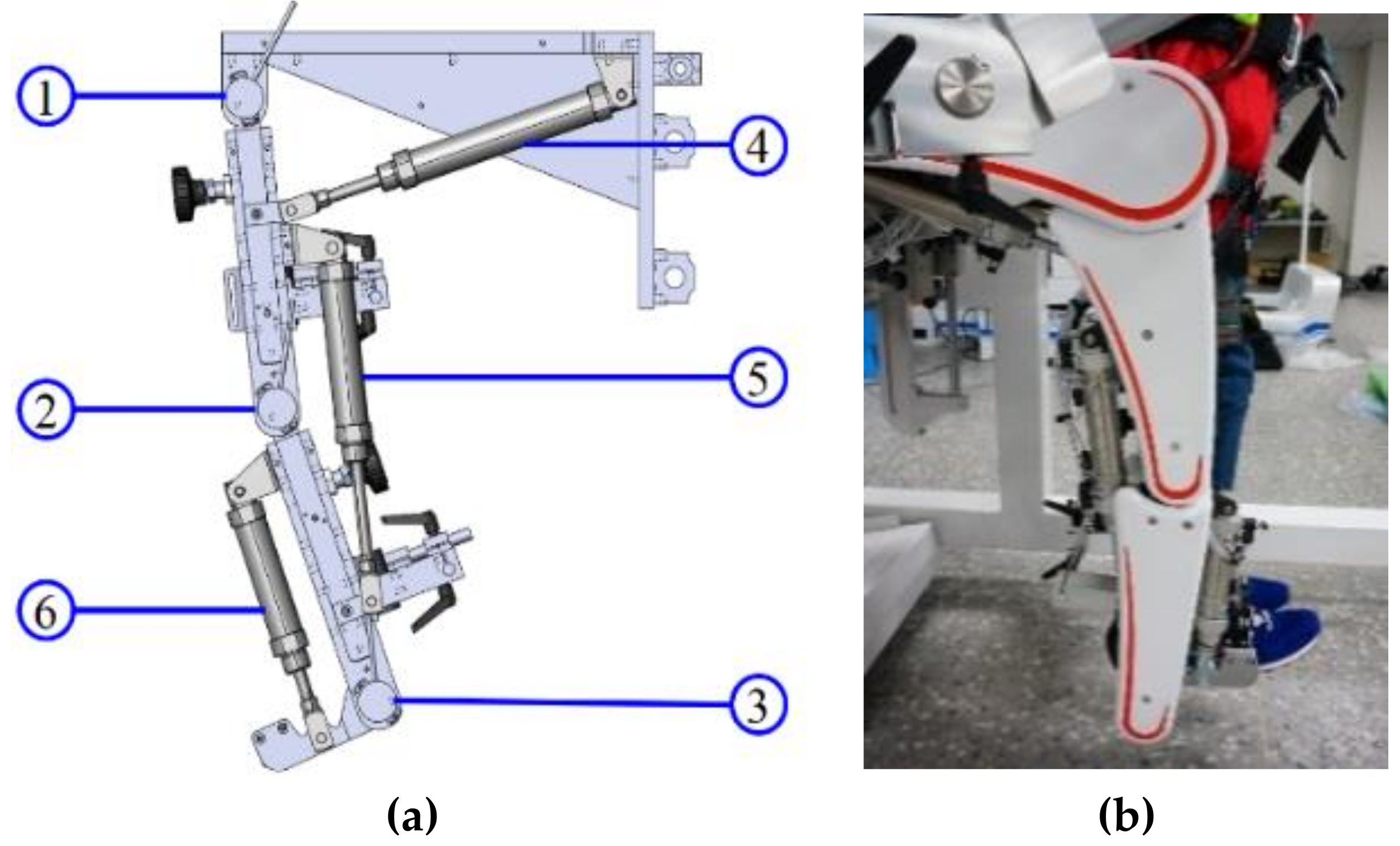
2.3. Pneumatic Gait Orthosis System
3. Design of the Gait Training Trajectory for the PGOS
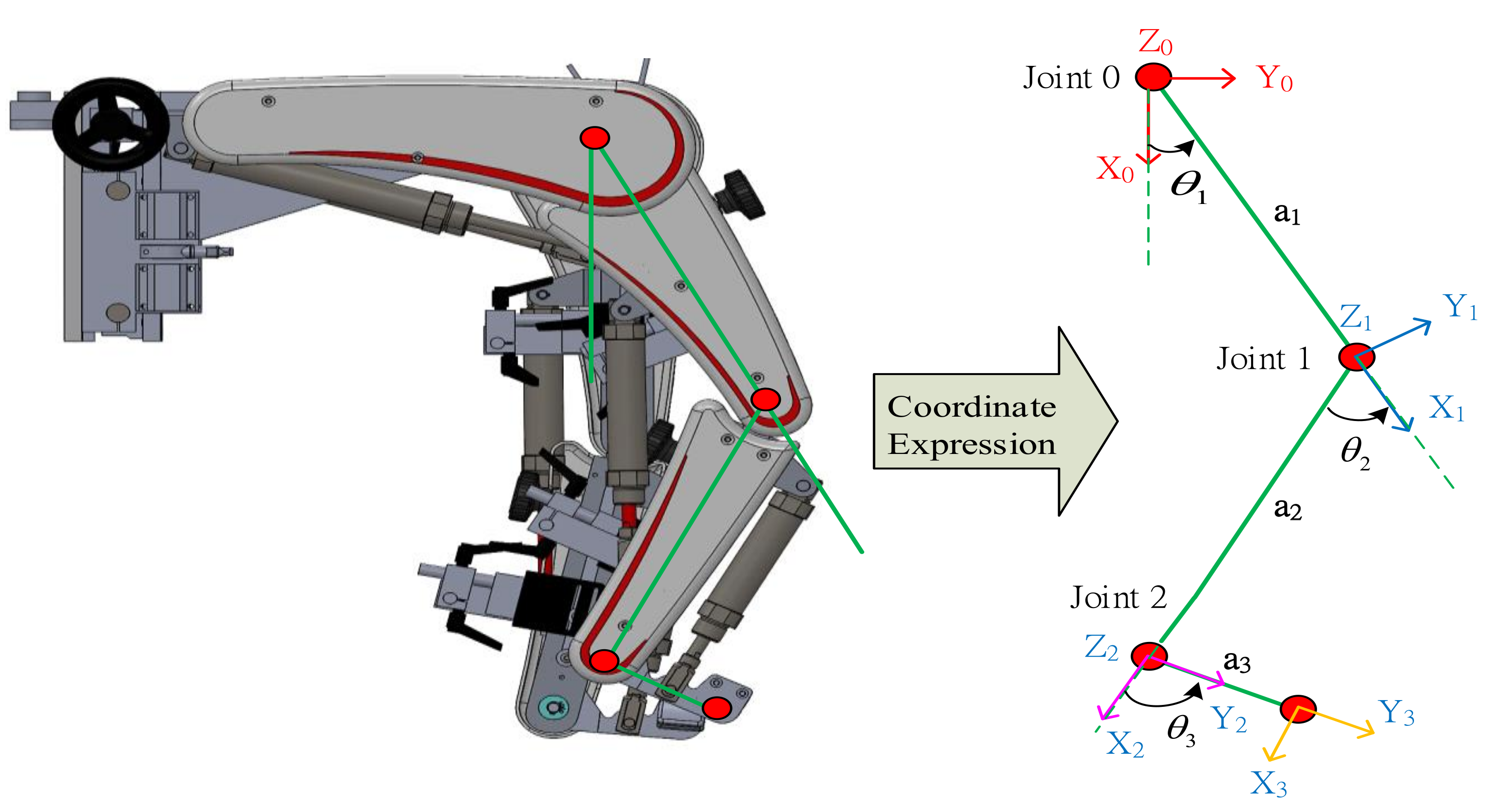
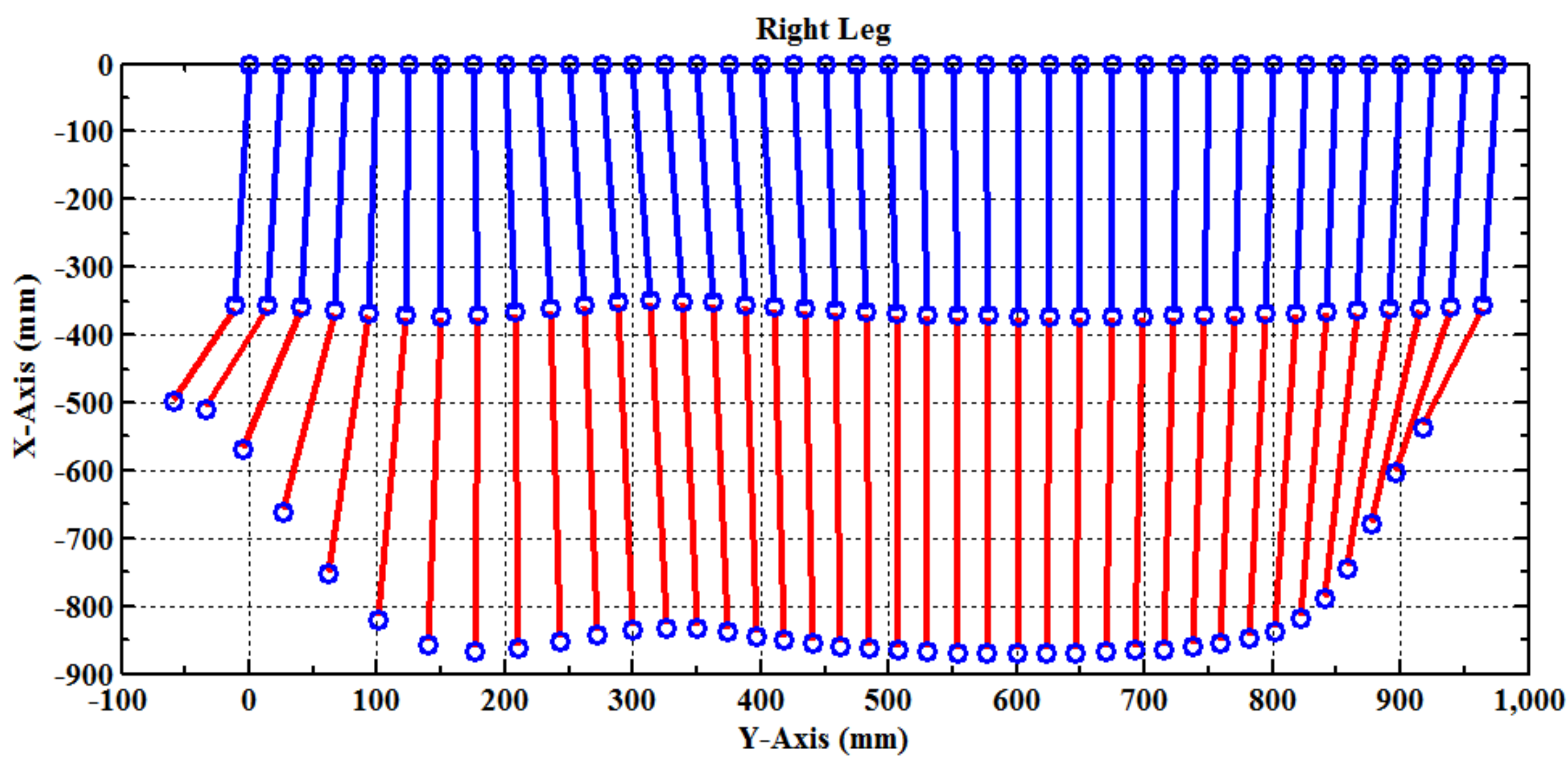
3.1. Forward Kinematic Analysis of the PGOS
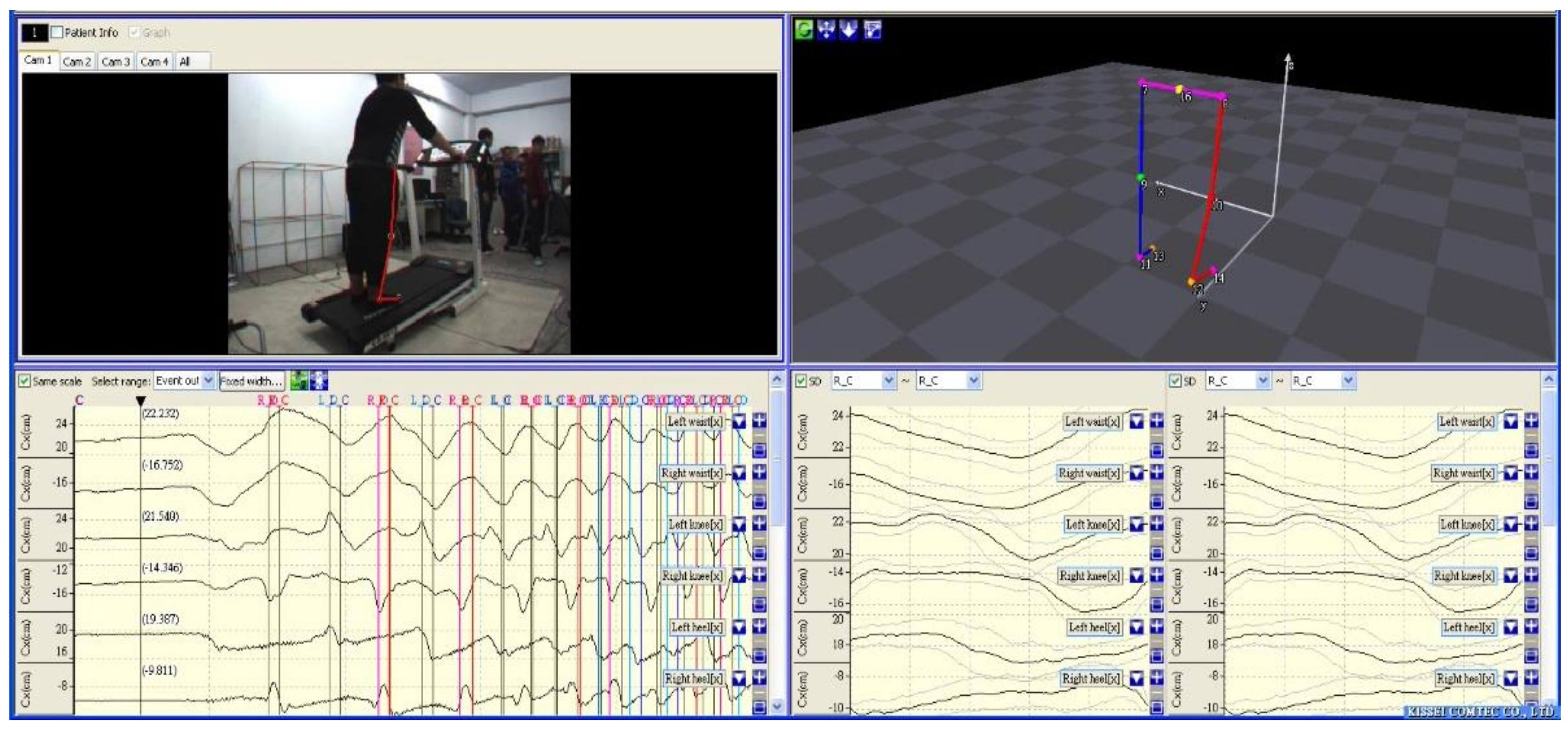
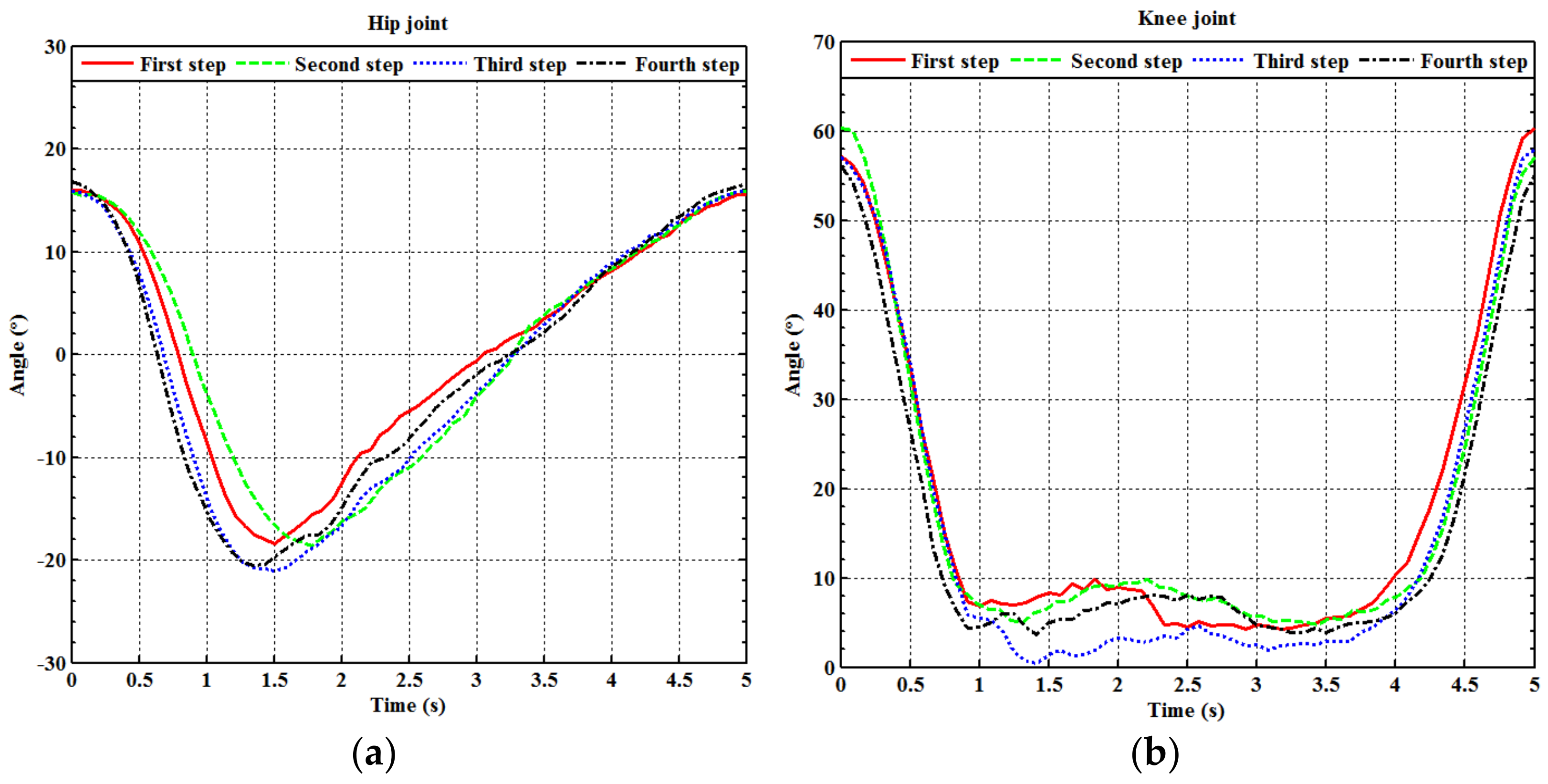
3.2. Gait Parameter Extraction
3.3. Design of Gait Training Cycle
4. Controller Design for the PRPGTS
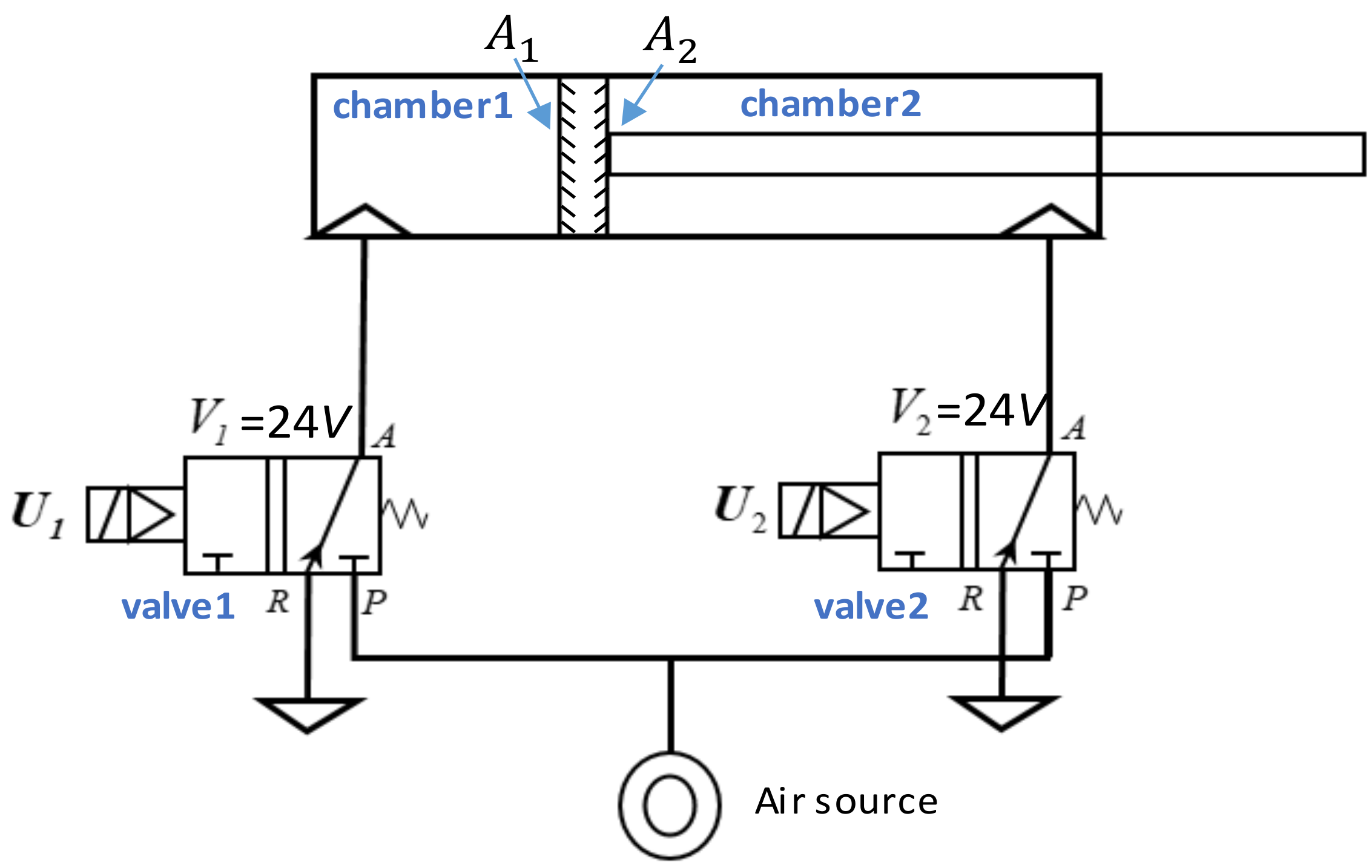
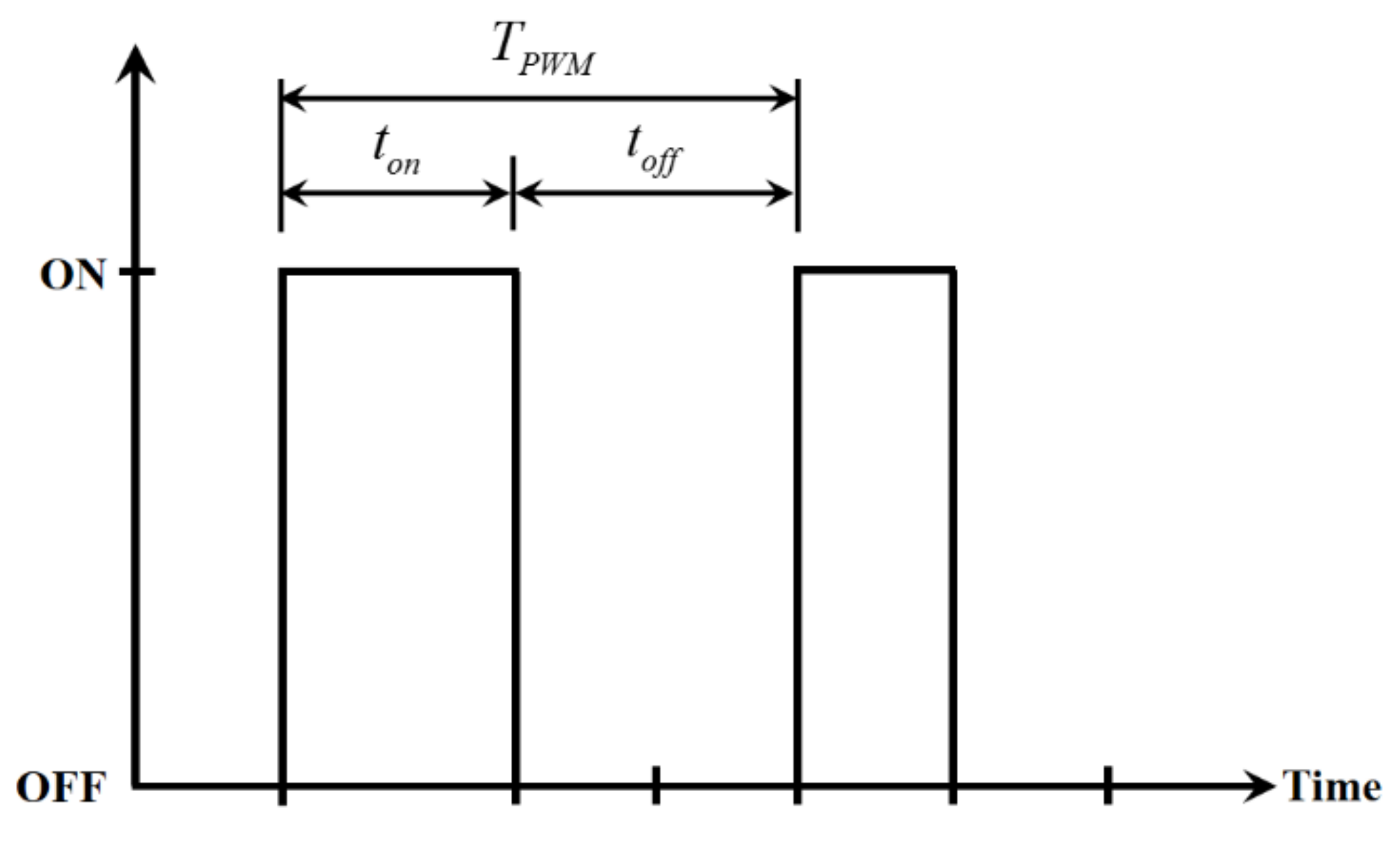
4.1. Mathematical Model of the Pneumatic Actuator
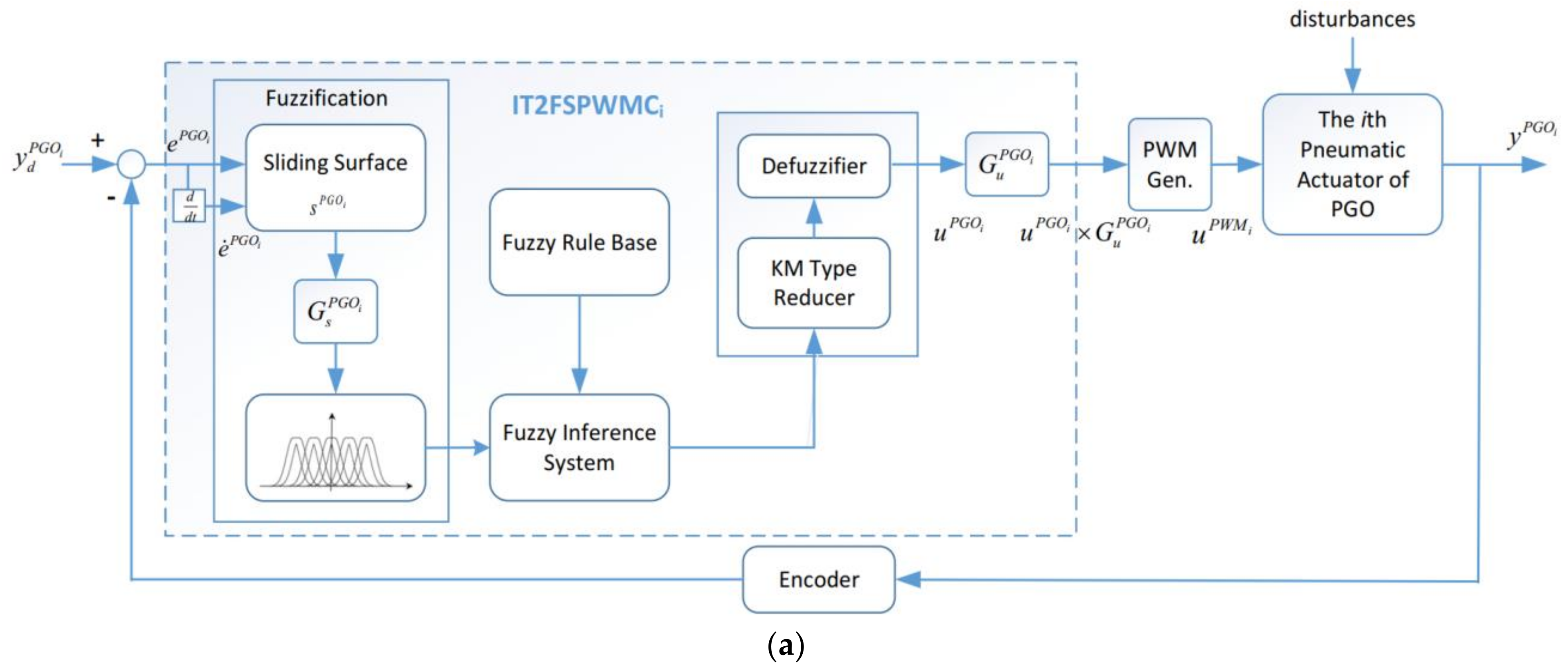
4.2. Interval Type-2 Fuzzy Sliding Pulse-Width Modulation Control for the PGOS
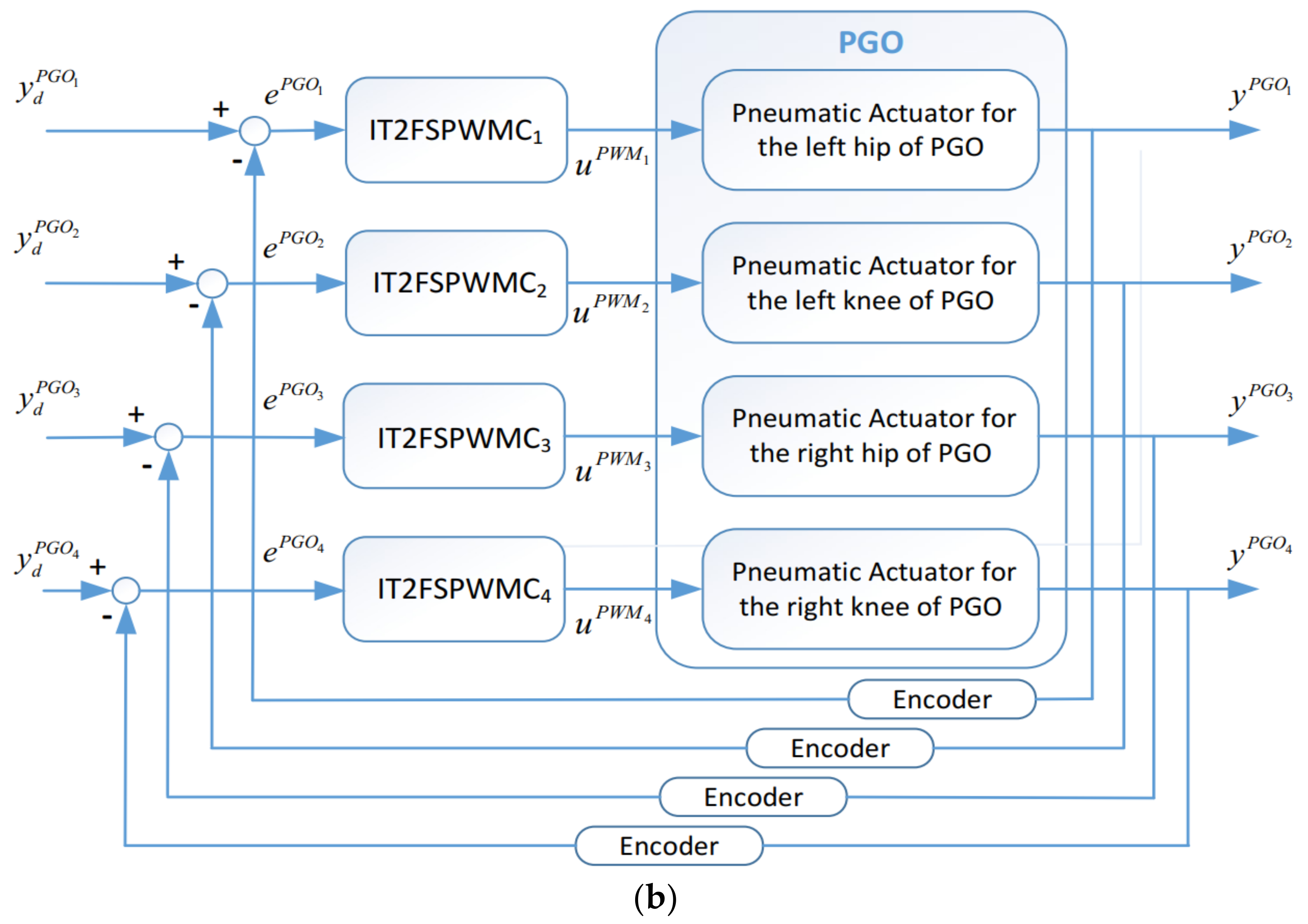
4.3. Design of an Interval Type-2 Fuzzy Sliding Controller for the PBWSS
5. Experiments Results and Discussion
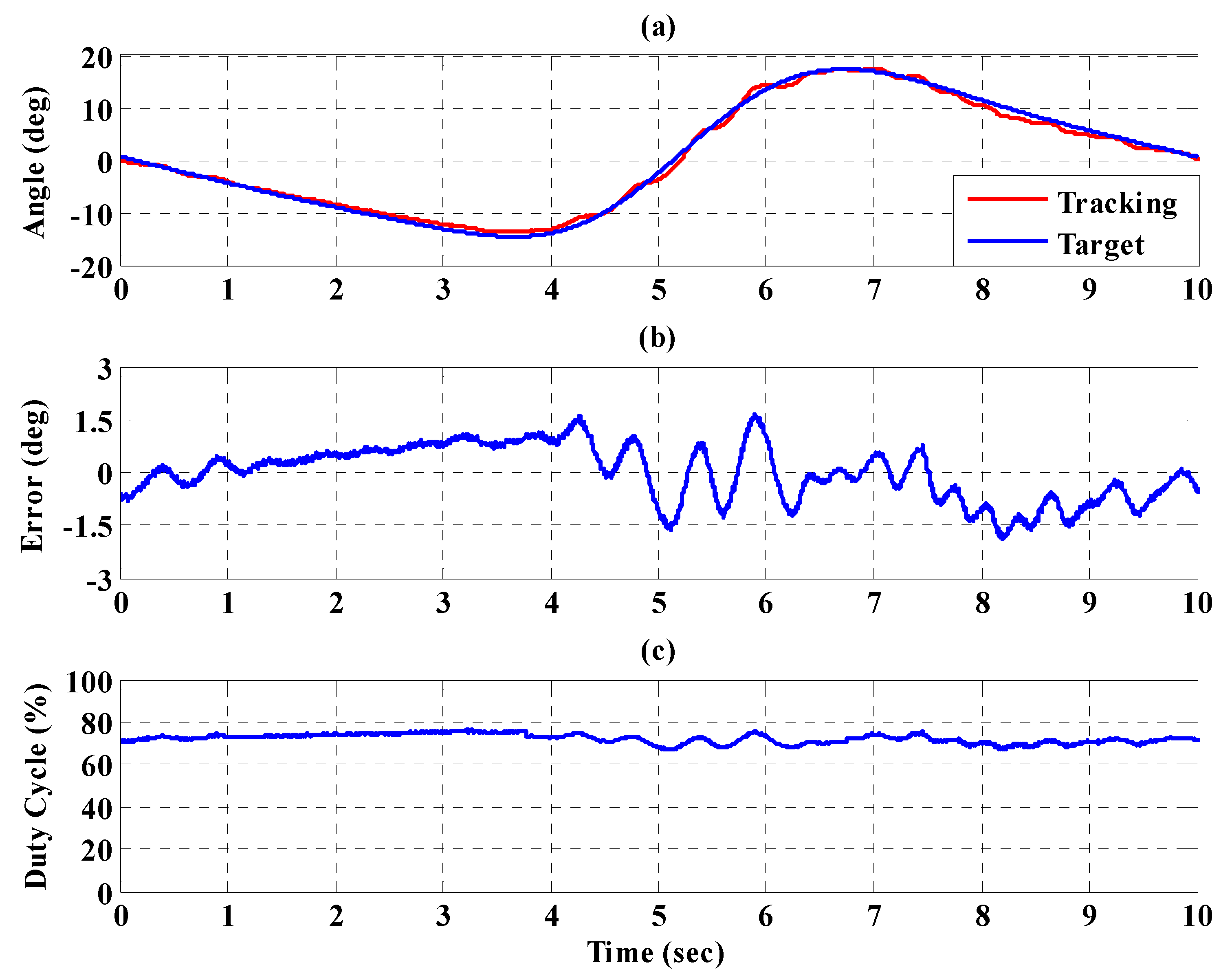
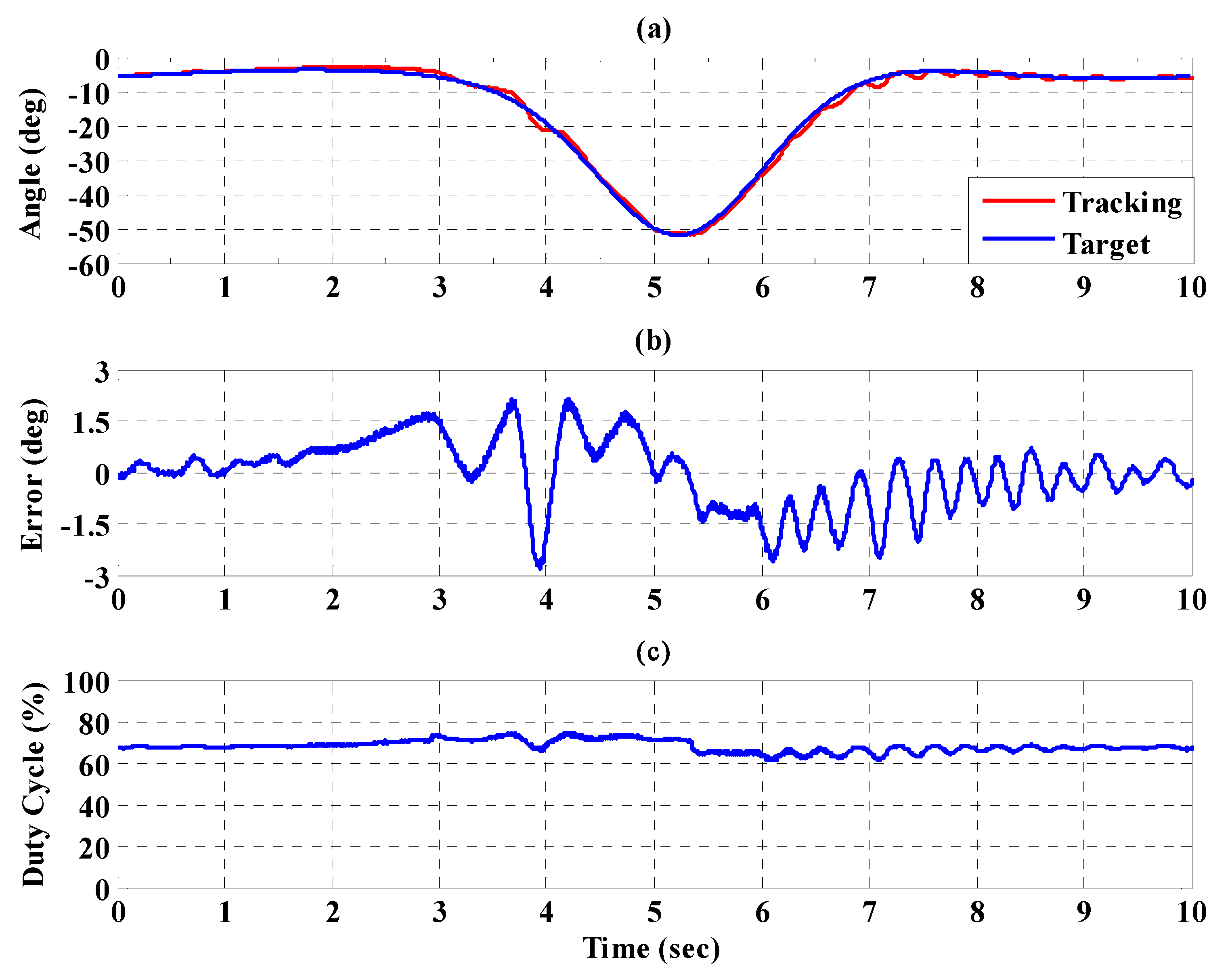
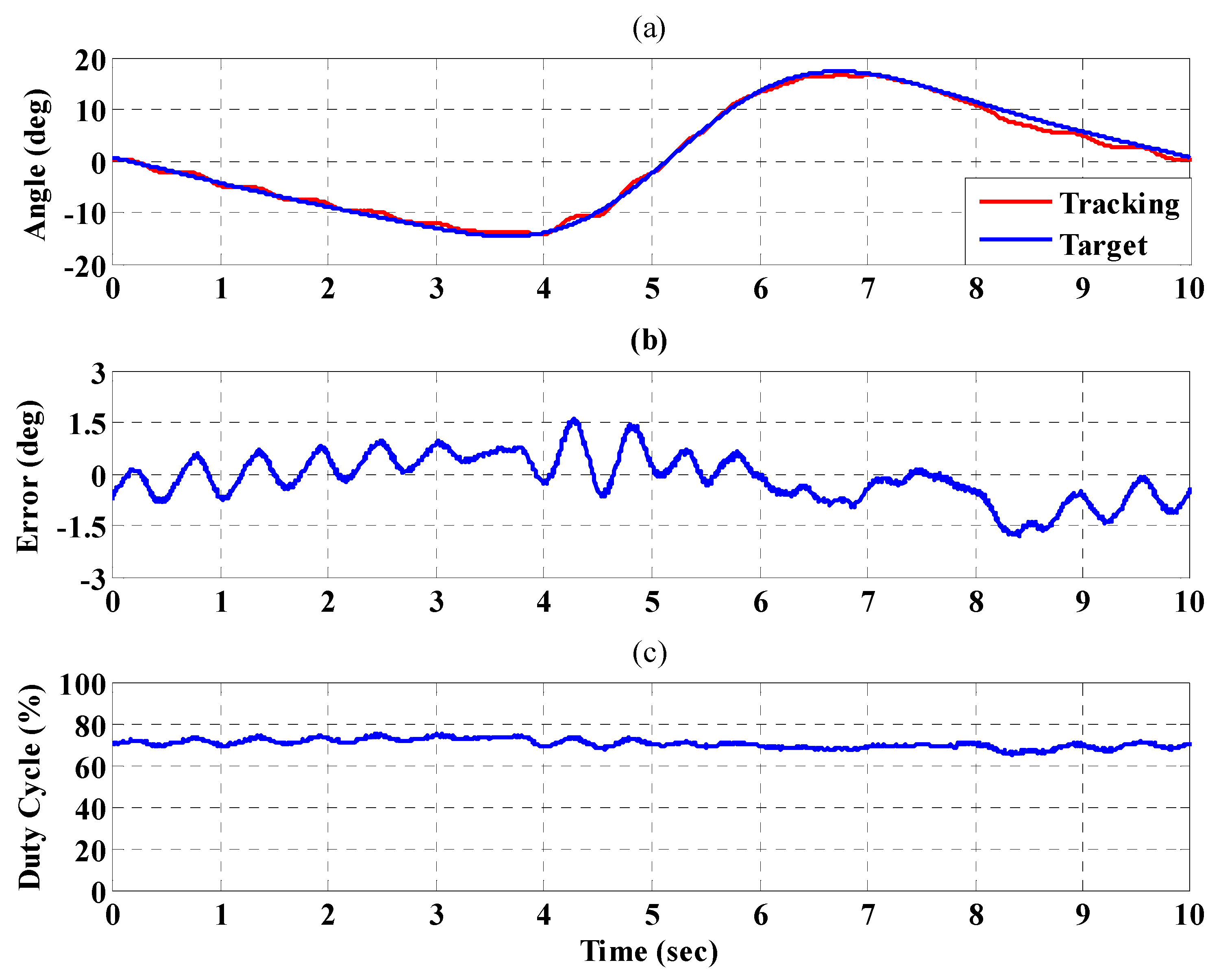
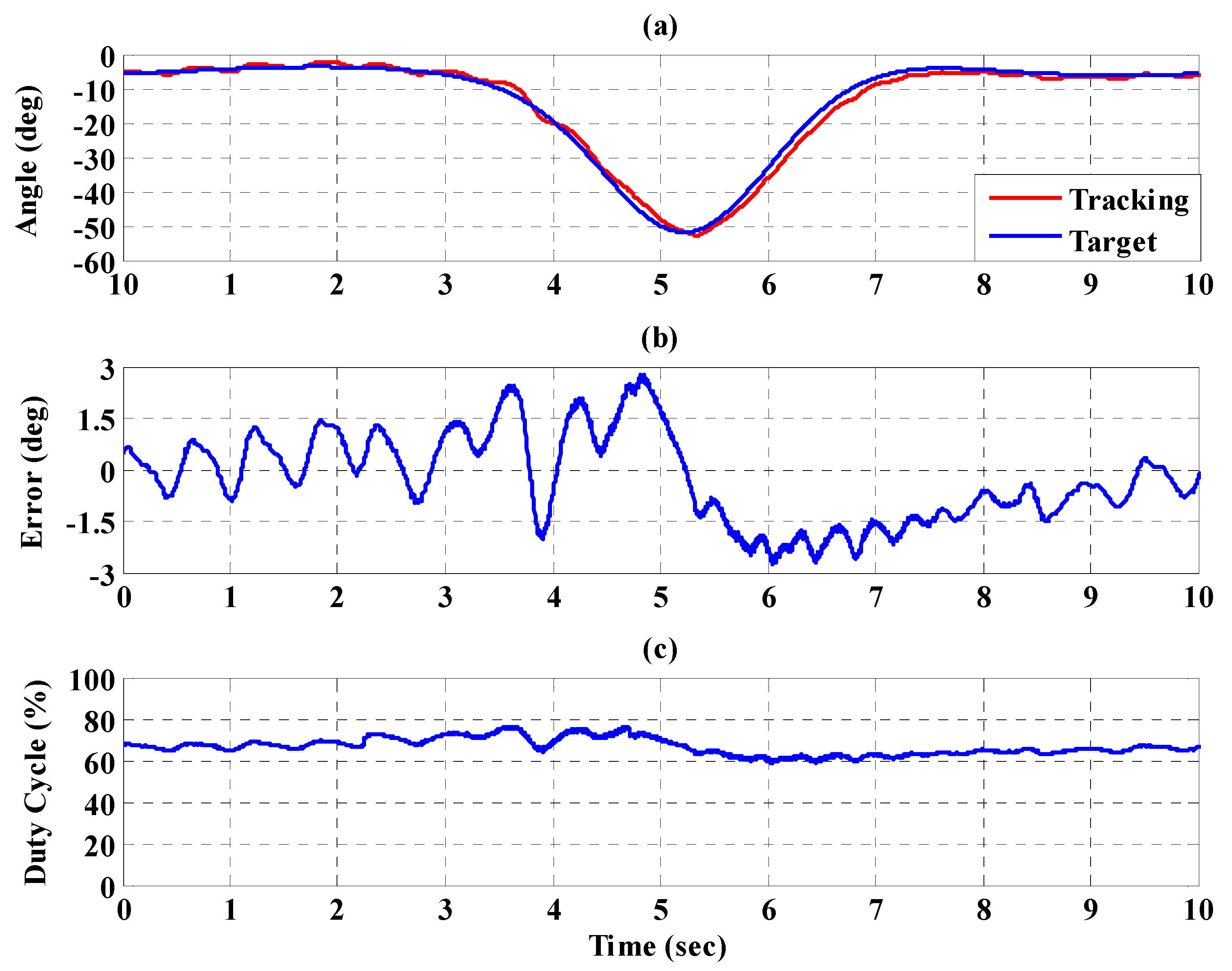
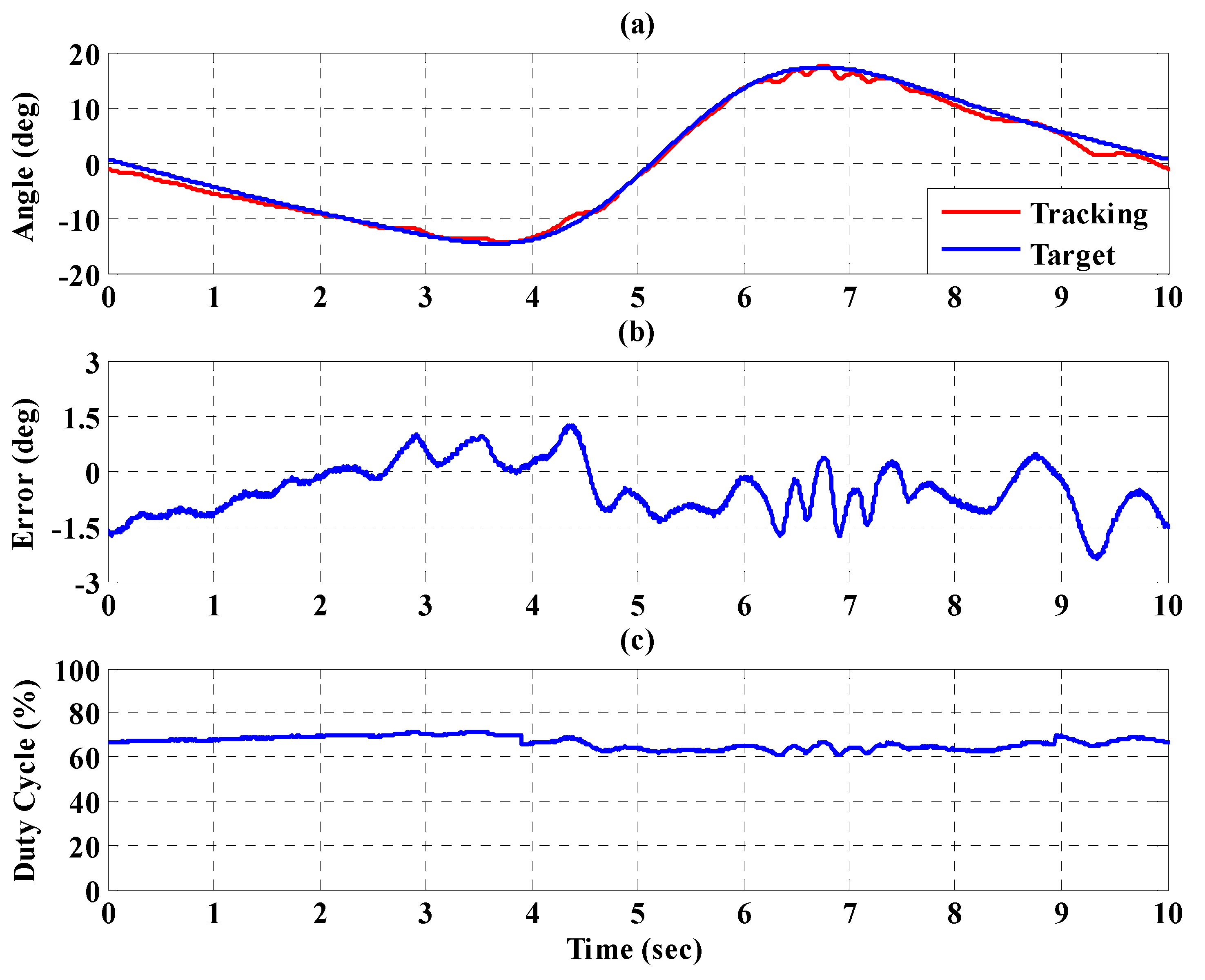
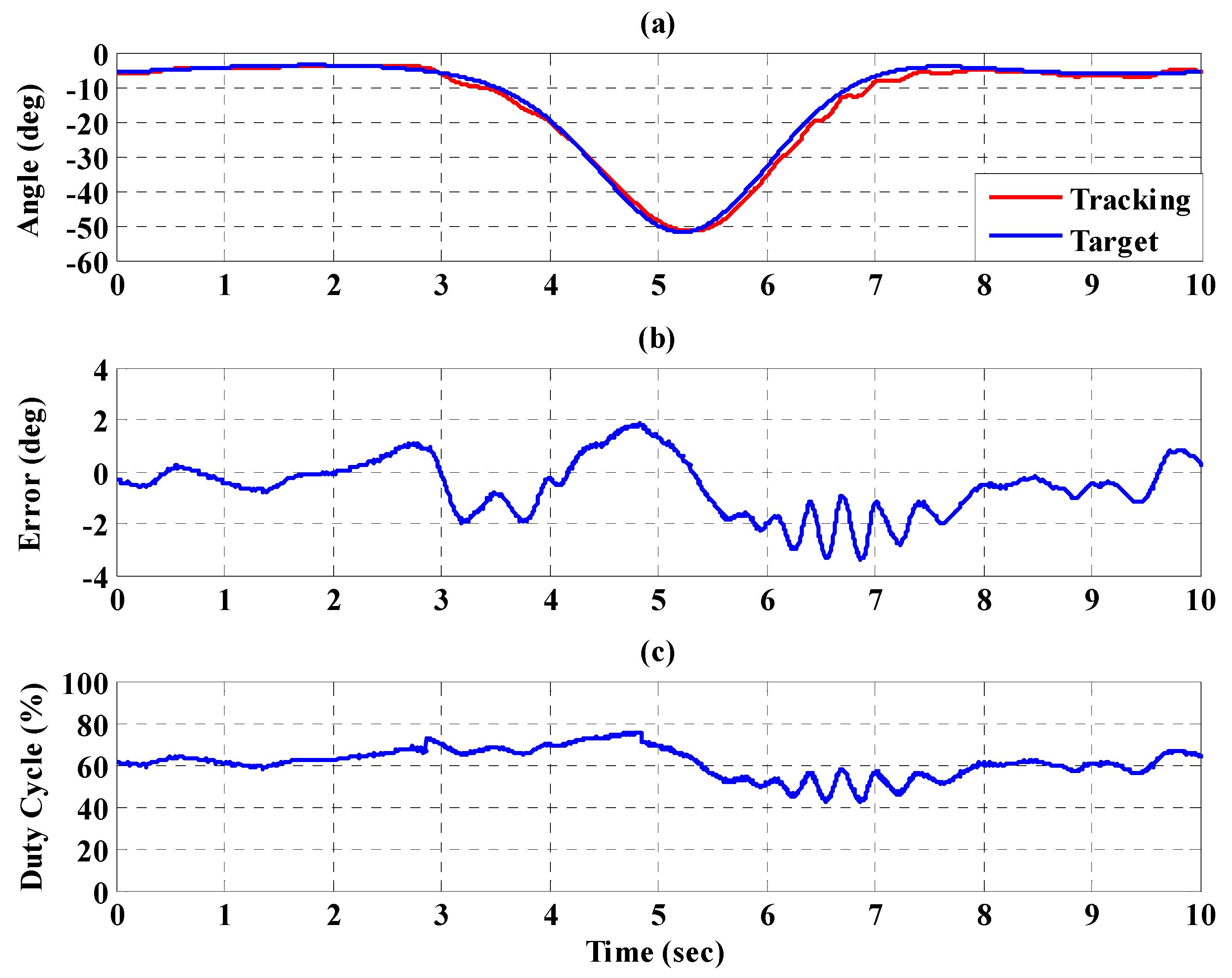
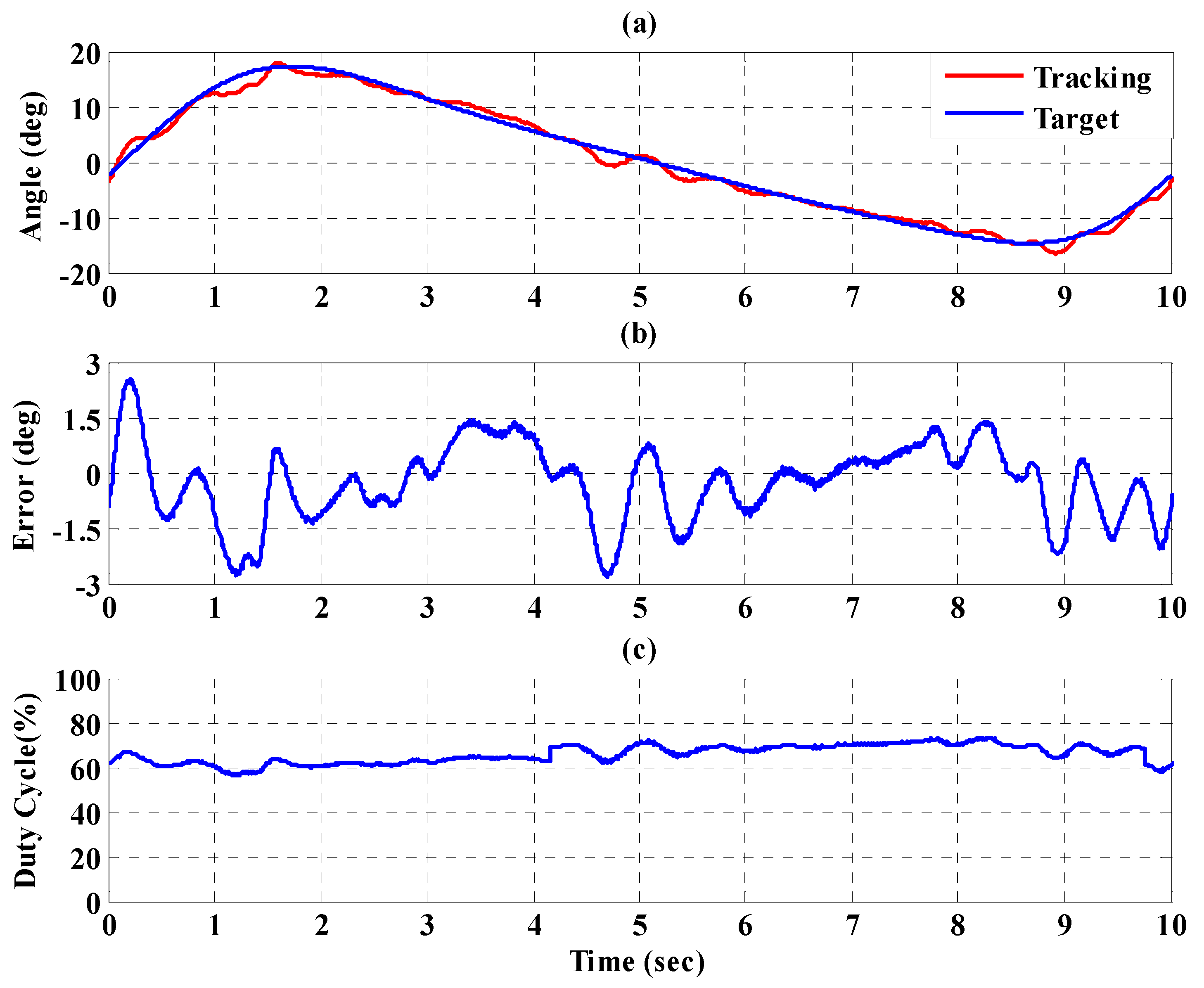
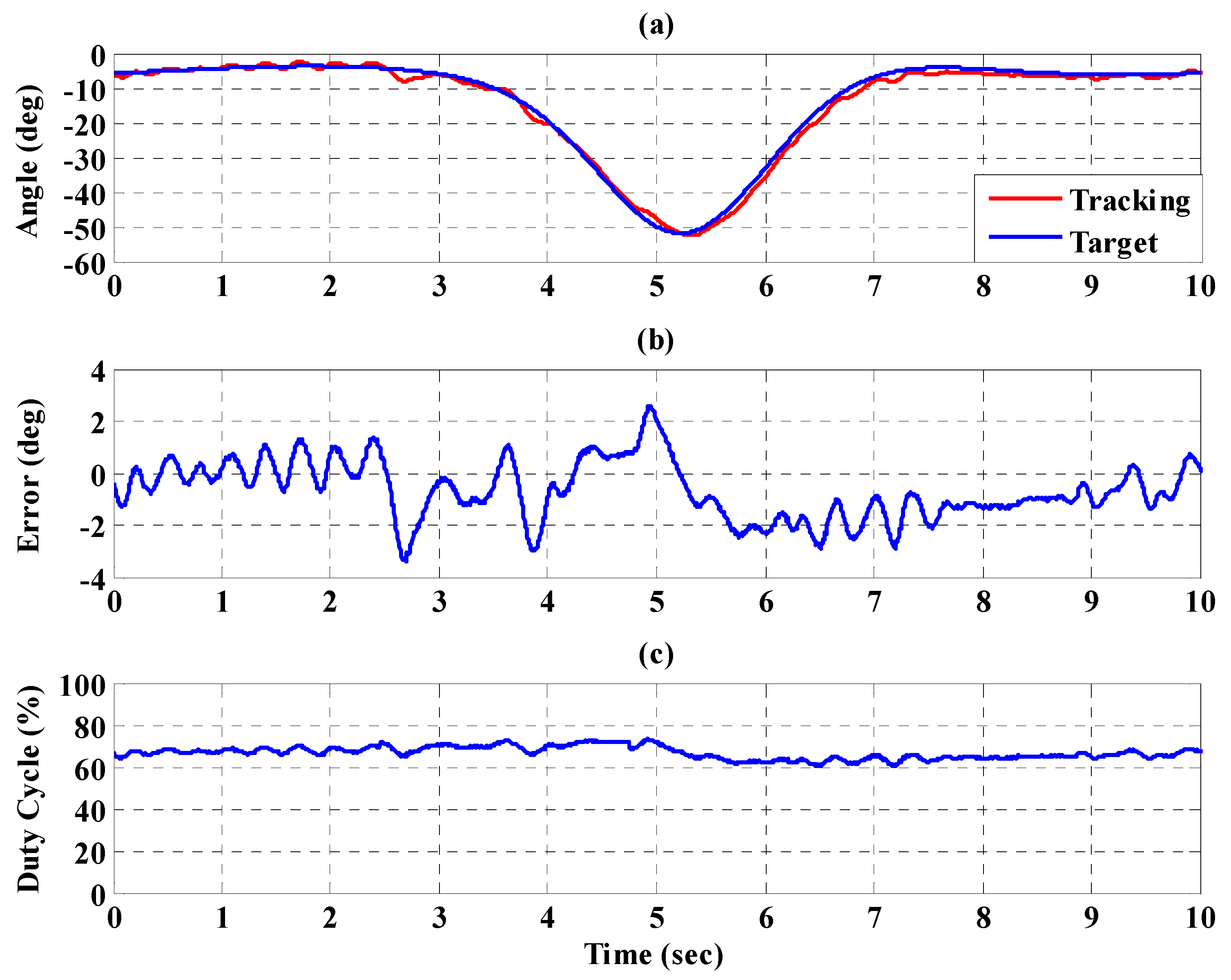
5.1. Control of the Motion for the PGOS Using Interval Type-2 Fuzzy Sliding Pulse-Width Modulation Controllers
- Step 1:
- The time scalar of the full gait cycle is set to 2 for the ten-second examination. The reference translational trajectories, i.e.,, , and , for the joints of the lower limb exoskeleton are calculated by Equations (7) and (8).
- Step 2:
- Power on the pneumatic postural support system.
- Step 3:
- The interval type-2 fuzzy sliding pulse-width modulation controller is designed according to Equations (12) and (15) with the parameters given in Table 3.
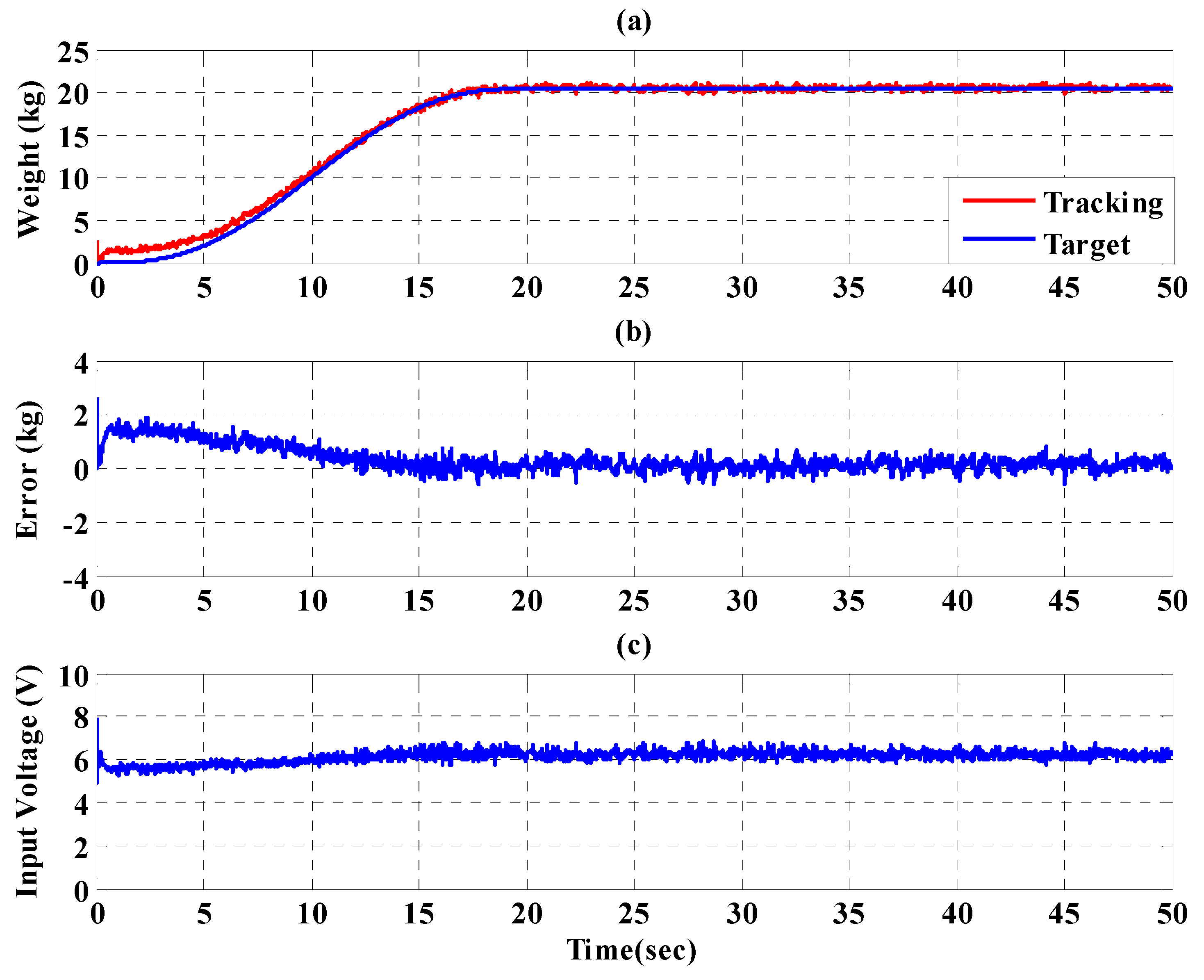
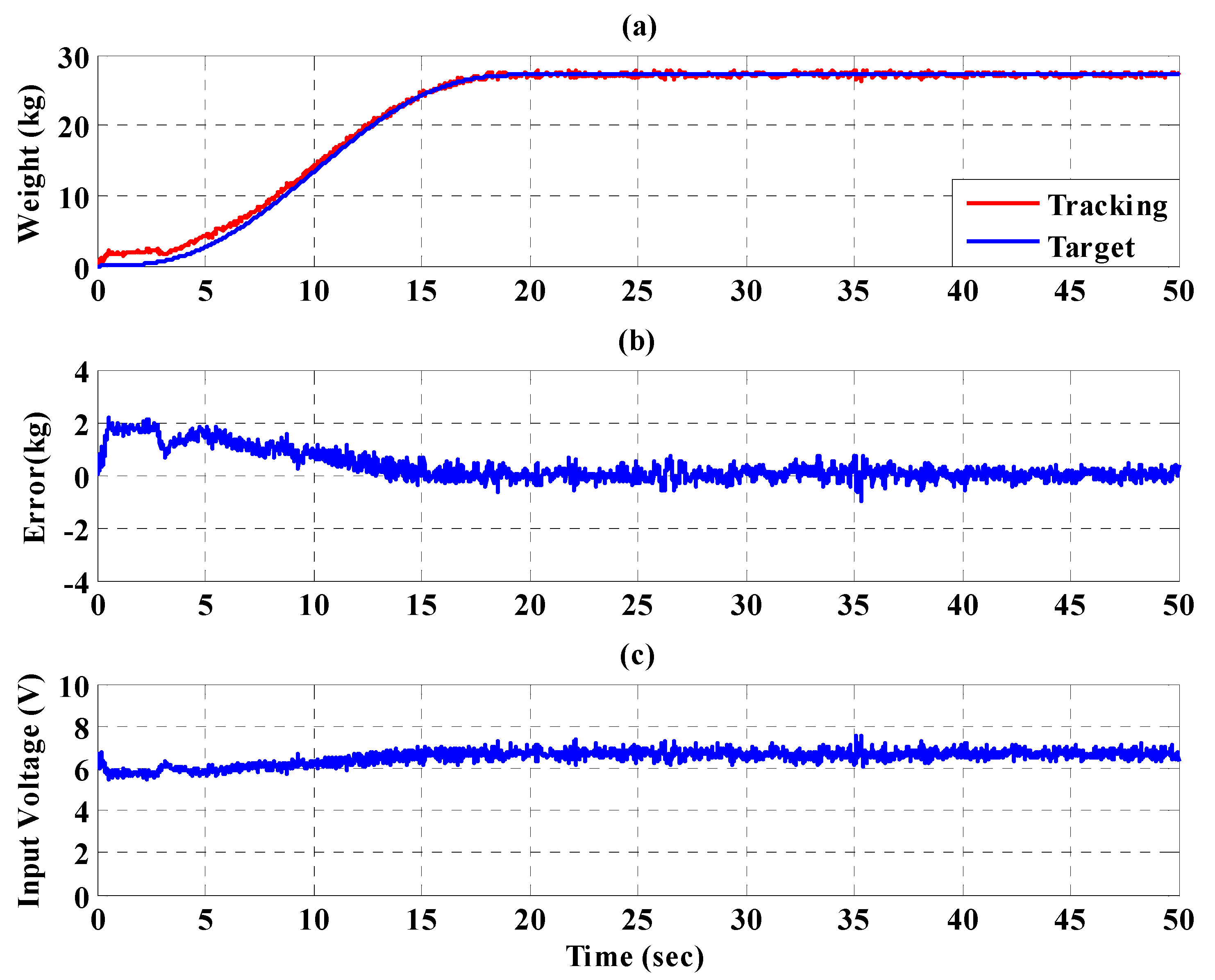
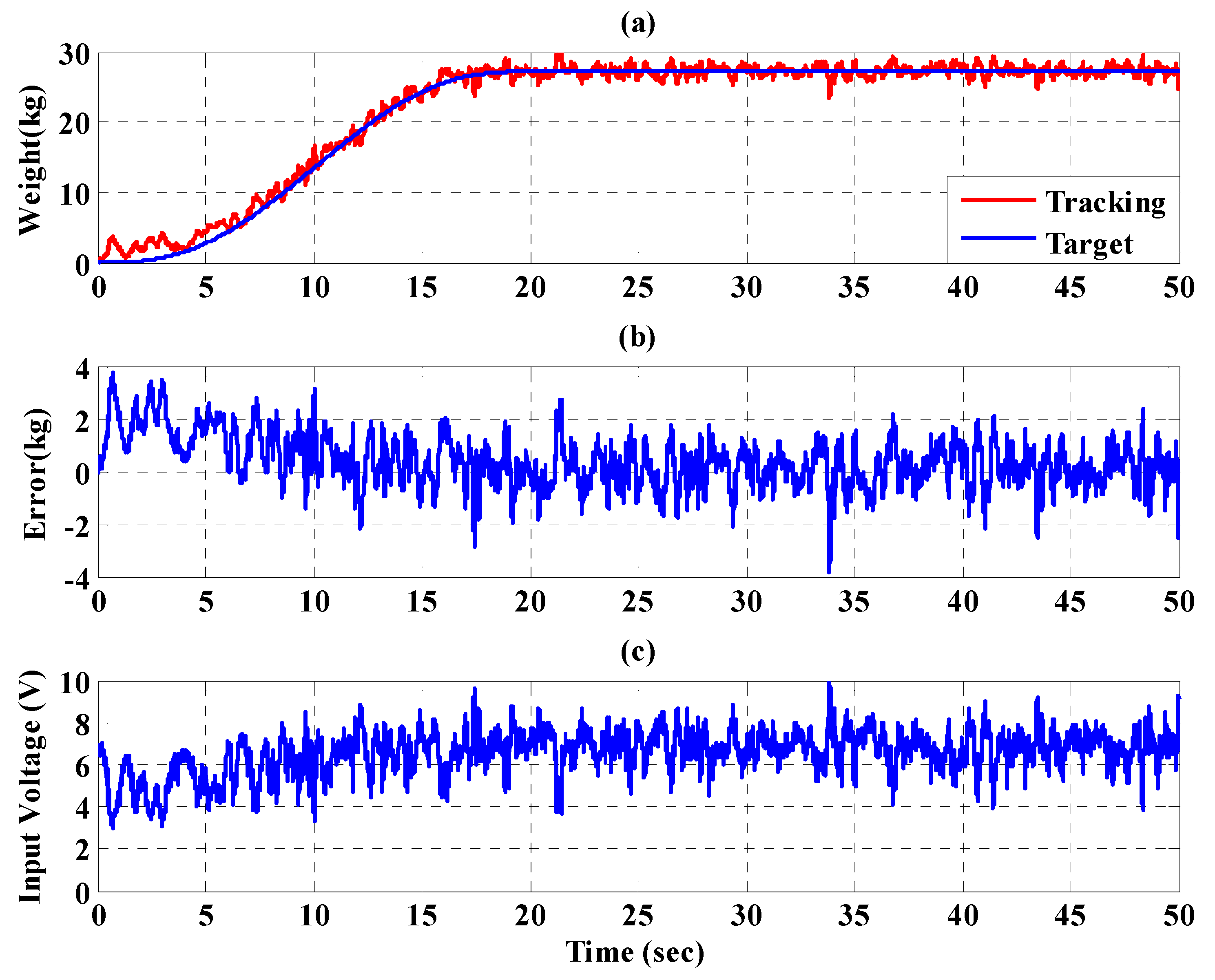
5.2. Static Bodyweight Unloading Force Control for the PBWSS
- Step 1:
- The targeted weight reduction for the subject is set to 20% (13.6 kg weight loss), 30% (20.4 kg weight loss), and 40% (27.2 kg weight loss) in this experiment. The load cell directly senses the weight of the subject and sends it back to the IT2FSC, so that the reference inputs and can be chosen as the targeted weight; that is kg for the experiment with a 20% weight reduction, kg for the experiment with 30% weight reduction, kg for the experiment with 40% weight reduction. The reference inputs and are described as the fifth-order polynomial continuous function to ensure the PBWSS moves smoothly, stably, and safely.
- Step 2:
- Power on the pneumatic postural support system.
- Step 3:
- The controller IT2FSC is designed according to Equation (19), with the parameters given in Table 4.
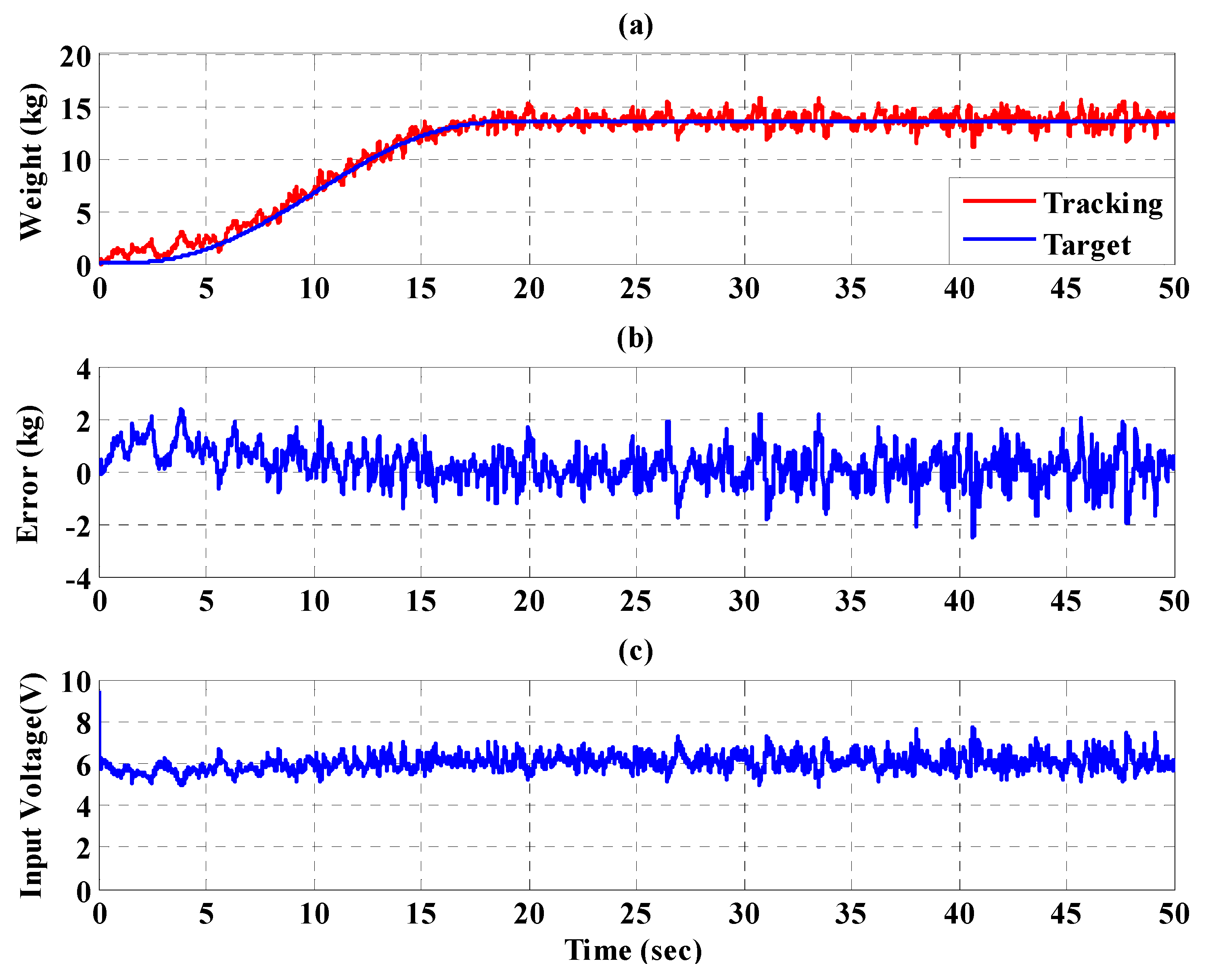
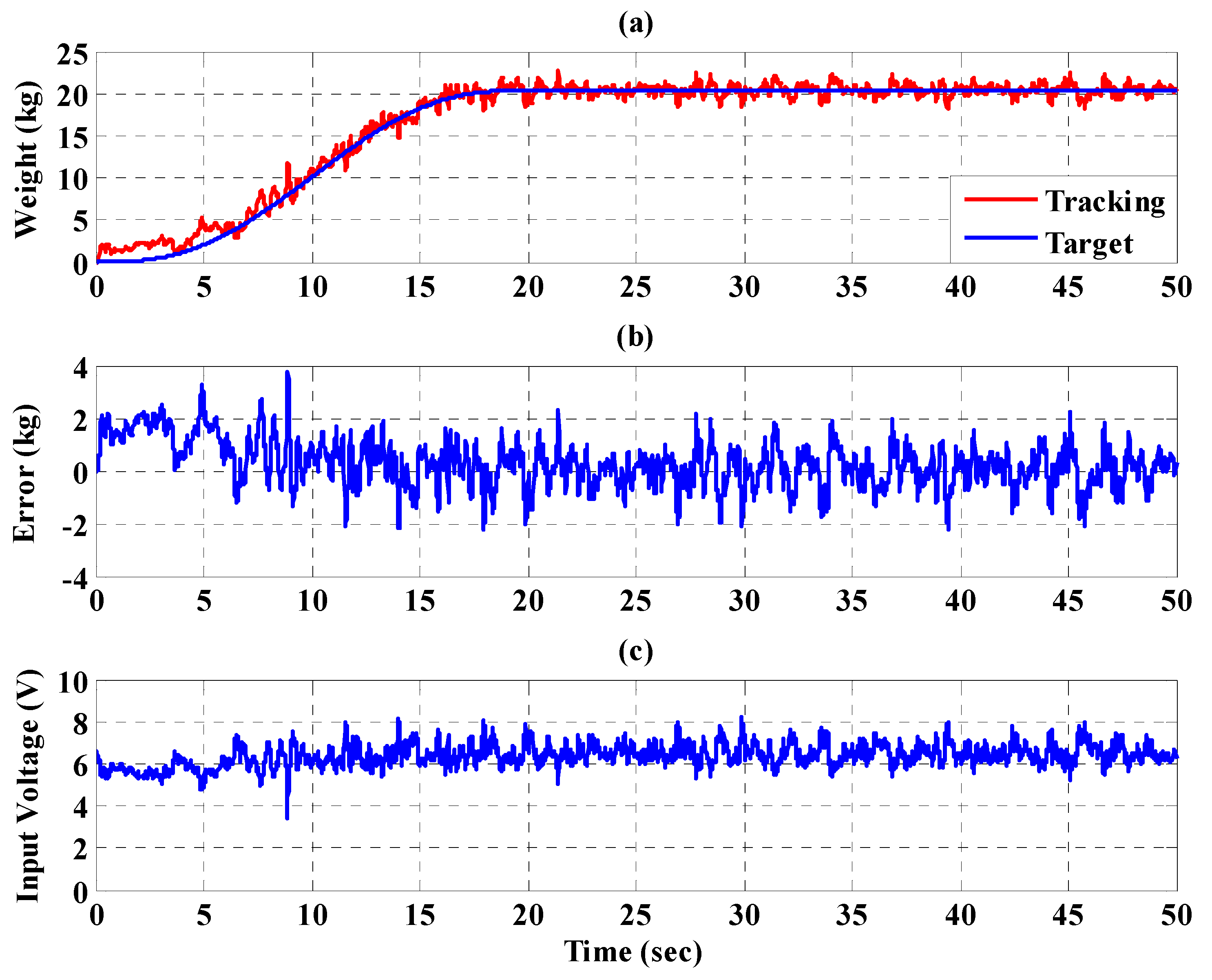
5.3. Dynamic Bodyweight Unloading Force Control for the PBWSS
- Step 1:
- The targeted weight reduction for the subject was set to 20% (13.6 kg weight loss), 30% (20.4 kg weight loss), and 40% (27.2 kg weight loss) in this experiment. The load cell directly senses the weight of the subject and sends it back to the IT2FSC, so the reference inputs and are defined as the targeted weight; that is kg for the experiment with a 20% weight reduction, kg for the experiment with 30% weight reduction, and kg for the experiment with 40% weight reduction. The reference inputs and are described as the fifth-order polynomial continuous function to ensure the PBWSS moves smoothly, stably, and safely.
- Step 2:
- Power on the pneumatic postural support system.
- Step 3:
- The controller IT2FSC was designed according to Equation (19), with the parameters given in Table 5.
- Step 4:
- The procedure of the PGOS control is identical to experiment 1. The interval type-2 fuzzy sliding pulse-width modulation controllers were designed according to Equations (12) and (15), with the parameters given in Table 3.
6. Conclusions
7. Patents
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Chen, G.; Zhou, Z.; Vanderborght, B.; Wang, N.; Wang, Q. Proxy-based sliding mode control of a robotic ankle-foot system for post-stroke rehabilitation. Adv. Robot. 2016, 30, 992–1003. [Google Scholar] [CrossRef]
- Andrea, G.; Martin, S.; Elisa, P.; Jan, E.; Michael, E.; Marko, W.; Ingeborg, K.M.; Giovanni, C. Brain representation of active and passive hand movements in children. Pediatr. Res. 2007, 61, 485–490. [Google Scholar]
- Lukas, J.; Laura, M.C.; Peter, W.; Robert, R.; Lars, M.; Spyros, K. Brain activation associated with active and passive lower limb stepping. Front. Hum. Neurosci. 2014, 8. [Google Scholar]
- Zhavoronkova, L.A.; Boldyreva, G.N.; Kuptsova, S.V.; Sharova, E.V.; Smirnov, A.S.; Pronin, I.N. fMRI responses of the brain during active and passive movements in left-handed subjects. Hum. Physiol. 2017, 43, 191–198. [Google Scholar] [CrossRef]
- Finch, L.; Barbeau, H.; Arsenault, B. Influence of Body Weight Support on Normal Human Gait: Development of a Gait Retraining Strategy. Phys. Ther. 1991, 71, 842–897. [Google Scholar] [CrossRef] [PubMed]
- He, J.P.; Kram, R.; McMahon, T.A. Mechanics of running under simulated low gravity. J. Appl. Physiol. 1991, 71, 863–870. [Google Scholar] [CrossRef] [PubMed]
- Kram, R.; Domingo, A.; Ferris, D.P. Effect of reduced gravity on the preferred walk-run transition speed. J. Exp. Biol. 1997, 200, 821–826. [Google Scholar] [CrossRef] [PubMed]
- Dietz, V.; Colombo, G.; Jensen, L. Locomotor activity in spinal man. Lancet 1994, 344, 1260–1263. [Google Scholar] [CrossRef]
- Hesse, S.; Malezic, M.; Schaffrin, A.; Mauritz, K.H. Restoration of gait by combined treadmill training and multichannel electrical stimulation in nonambulatory hemiparetic patients. J. Rehabil. Med. 1995, 27, 199–204. [Google Scholar]
- Visintin, M.; Barbeau, H.; Bitensky, N.K.; Mayo, N.E. A new approach to retrain gait in stroke patients through body weight support and treadmill stimulation. Stroke 1998, 29, 1122–1128. [Google Scholar] [CrossRef] [Green Version]
- Hesse, S.; Konrad, M.; Uhlenbrock, D. Treadmill walking with partial body weight support versus floor walking in hemiparetic subjects. Arch. Phys. Med. Rehabil. 1999, 80, 421–427. [Google Scholar] [CrossRef]
- Wernig, A.; Nanassy, A.; Mller, S. Laufband (treadmill) therapy in incomplete paraplegia and tetraplegia. J. Neurotrauma 1999, 16, 719–726. [Google Scholar] [CrossRef]
- Edgerton, V.R.; Leon, R.D.; Harkema, S.J.; Hodgson, J.A.; London, N.; Reinkensmeyer, D.J.; Roy, R.R.; Talmadge, R.J.; Tillakaratne, N.J.; Timoszyk, W.; et al. Retraining the injured spinal cord. J. Physiol. 2001, 533, 15–22. [Google Scholar] [CrossRef]
- Hubertus, J.A.H.; Irene, R.; Sandra, B.R. Clinical utility of the over-ground bodyweight-supporting walking system Andago in children and youths with gait impairments. J. Neuroeng. Rehabil. 2021, 16, 1–20. [Google Scholar]
- Grzegorz, G.; Piotr, G.; Slawomir, D. Control System Design of an Underactuated Dynamic Body Weight Support System Using Its Stability. Sensors 2021, 21, 5051. [Google Scholar]
- Grzegorz, G.; Piotr, G.; Slawomir, D. Modeling and Control of an Underactuated System for Dynamic Body Weight Support. Appl. Sci. 2021, 11, 905. [Google Scholar]
- Barbeau, H.; Visintin, M. Optimal outcomes obtained with body-weight support combined with treadmill training in stroke subjects. Arch Phys. Med. Rehabil. 2003, 84, 1458–1465. [Google Scholar] [CrossRef]
- Mehrholz, J.; Pohl, M.; Elsner, B. Treadmill training and body weight support for walking after stroke. Cochrane Database Syst. Rev. 2014, 1, 1–202. [Google Scholar]
- Mao, Y.R.; Lo, W.L.; Lin, Q.; Li, L.; Xiao, X.; Raghavan, P.; Huang, D.F. The effect of body weight support treadmill training on gait recovery, proximal lower limb motor pattern, and balance in patients with subacute stroke. BioMed Res. Int. 2015, 2015, 175719. [Google Scholar] [CrossRef]
- Gazzani, F.; Fadda, A.; Torre, M.; Macellari, V. WARD: A pneumatic system for body weight relief in gait rehabilitation. IEEE Trans. Rehabilitation Eng. 2000, 8, 506–513. [Google Scholar] [CrossRef]
- Mcdaid, A.; Kora, K.; Xie, S.; Lutz, J.; Battley, M. Human-inspired robotic exoskeleton (HuREx) for lower limb rehabilitation. In Proceedings of the IEEE International Conference on Mechatronics and Automation, Takamatsu, Japan, 4–7 August 2013; pp. 19–24. [Google Scholar]
- Riener, R.; Lunenburger, L.; Colombo, G. Human-centered robotics applied to gait training and assessment. J. Rehabil. Res. Dev. 2006, 43, 679–694. [Google Scholar] [CrossRef]
- Veneman, J.F.; Kruidhof, R.; Ekkelenkamp, R. Design and evaluation of the LOPES exoskeleton robot for interactive gait rehabilitation. IEEE Trans. Neural Syst. Rehabilitation Eng. 2007, 15, 379–386. [Google Scholar] [CrossRef] [Green Version]
- Fisher, S.; Lucas, L.; Thrasher, T.A. Robot-assisted gait training for patients with hemiparesis due to stroke. Top. Stroke Rehabil. 2011, 18, 269–276. [Google Scholar] [CrossRef]
- Guo, B.; Han, J.; Li, X.; Lin, S.Y. Human–robot interactive control based on reinforcement learning for gait rehabilitation training robot. Int. J. Adv. Robot. Syst. 2019, 12, 1–16. [Google Scholar]
- Beyl, P.; Knaepen, K.; Duerinck, S.; Damme, M.V.; Vanderborght, B.; Meeusen, R.; Lefeber, D. Safe and compliant guidance by a powered knee exoskeleton for robot-assisted rehabilitation of gait. Adv. Robot. 2011, 25, 513–535. [Google Scholar] [CrossRef]
- Veale, A.J.; Xie, S.Q. Towards Compliant and Wearable Robotic Orthoses: A Review of Current and Emerging Actuator Technologies. Med. Eng. Phys. 2016, 38, 317–325. [Google Scholar] [CrossRef] [PubMed]
- Beyl, P.; Damme, M.V.; Ham, R.V.; Vanderborght, B.; Lefeber, D. Design and control of a lower limb exoskeleton for robot-assisted gait training. Appl. Bionics Biomech. 2009, 6, 229–243. [Google Scholar] [CrossRef] [Green Version]
- Ozkan, M.; Inou, K.; Negishi, K.; Yamanaka, T. Defining a Neural Network Controller Structure for a Rubbertuator Robot. Neural Netw. 2000, 13, 533–544. [Google Scholar] [CrossRef]
- Caldwell, D.G.; Tsagarakis, N.G.; Kousidou, S.; Costa, N.; Sarakoglou, I. Soft exoskeletons for upper and lower body rehabilitation—Design, control and testing. Int. J. Hum. Comput. Stud. 2007, 4, 549–573. [Google Scholar] [CrossRef]
- Lewek, M.D. The influence of body weight support on ankle mechanics during treadmill walking. J. Biomech. 2011, 44, 128–133. [Google Scholar] [CrossRef]
- Jiangtao, C.; Honghai, L.; Ping, L.; David, B. Adaptive fuzzy logic controller for vehicle active suspensions with interval type-2 fuzzy membership functions. In Proceedings of the IEEE International Conference on Fuzzy Systems, Hong Kong, China, 1–6 June 2008; pp. 83–89. [Google Scholar]
- Bijan, R.S.; Mohammad, S.; Mehdi, R. Control of Active Suspension System: An Interval Type -2 Fuzzy Approach. World Appl. Sci. J. 2011, 12, 2218–2228. [Google Scholar]
- Zirkohi, M.M.; Lin, T.C. Interval type-2 fuzzy-neural network indirect adaptive sliding mode control for an active suspension system. Nonlinear Dyn. 2015, 79, 513–526. [Google Scholar] [CrossRef]
- Chiu, C.H.; Hung, Y.T. One wheel vehicle real world control based on interval type 2 fuzzy controller. Mechatronics 2020, 70, 102387. [Google Scholar] [CrossRef]
- Kelekci, E.; Kizir, S. Trajectory and vibration control of a flexible joint manipulator using interval type-2 fuzzy logic. ISA Trans. 2019, 94, 218–233. [Google Scholar] [CrossRef] [PubMed]
- Barbeau, H.; Rossignol, S. Recovery of locomotion after chronic spinalization in the adult cat. Brain Res. 1987, 412, 84–95. [Google Scholar] [CrossRef]
- Hishikawa, N.; Tanikawa, H.; Ohtsuka, K.; Mukaino, M.; Inagaki, K.; Matsuda, F.; Teranishi, T.; Kanada, Y.; Kagaya, H.; Saitoh, E. Quantitative assessment of knee extensor thrust, flexed-knee gait, insufficient knee flexion during the swing phase, and medial whip in hemiplegia using three-dimensional treadmill gait analysis. Top. Stroke Rehabil. 2018, 25, 548–553. [Google Scholar] [CrossRef]
- Mukaino, M.; Ohtsuka, K.; Tsuchiyama, K.; Matsuda, F.; Inagaki, K.; Yamada, J.; Tanikawa, H.; Saitoh, E. Feasibility of a Simplified, Clinically Oriented, Three-dimensional Gait Analysis System for the Gait Evaluation of Stroke Patients. Prog. Rehabil. Med. 2016, 1, 20160001. [Google Scholar]
- Li, I.H.; Lee, L.W. Interval type 2 hierarchical FNN with the H-infinity condition for MIMO non-affine systems. Appl. Soft Comput. 2012, 12, 1996–2011. [Google Scholar] [CrossRef]
- Tang, Z.; Xu, X.; Xiong, J.; Pei, Z. Trajectory planning and mechanic’s analysis of lower limb rehabilitation robot. Biomed. Mater. Eng. 2015, 26, 347–355. [Google Scholar]
- Chen, K.; Liu, Q.; Wang, R. Development of a body weight-support gait training robot. Chinese J. Rehabilitation Med. 2011, 26, 847–851. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Components | Type | Part of the PGOS |
|---|---|---|
| Single-rod pneumatic cylinder | CHELIC SDA32–150 | Hip joints for both legs |
| Single-rod pneumatic cylinder | CHELIC SDA32–100 | Knee joints for both legs |
| Single-rod pneumatic cylinder | CHELIC SDA32–75 | Ankle joints for both legs |
| Proportional pressure regulator | FESTO VPPM-6L-L-1-G18-0L6H-V1P-S1 | Hip joints, knee joint, and ankle joints for both legs |
| Incremental encoders | ELCO E38F8-C4AR-2000 at the maximum frequency of 300 kHz | Joints of the PGOS |
| Joint Variable | |||||
|---|---|---|---|---|---|
| 1 | 0 | 0 | |||
| 2 | 0 | 0 | |||
| 3 | 0 | 0 |
| Membership function of | ||||
| Membership function of | ||||
| Control parameters of joints | ||||
| Right hip | 0.5 | 0.4 | 0.5 | 1.2 |
| Right knee | 0.8 | 0.9 | 0.7 | 1.2 |
| Left hip | 0.7 | 1 | 0.5 | 1.1 |
| Left knee | 0.5 | 0.2 | 0.4 | 1.3 |
| Membership function of | ||||
| Membership function of | ||||
| Control parameters | ||||
| 3.32 | 2 | 0.85 | 1.12 | |
| Membership function of | ||||
| Membership function of | ||||
| Control parameters | ||||
| 3.32 | 2 | 0.75 | 1.06 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, I.-H.; Lin, Y.-S.; Lee, L.-W.; Lin, W.-T. Design, Manufacturing, and Control of a Pneumatic-Driven Passive Robotic Gait Training System for Muscle-Weakness in a Lower Limb. Sensors 2021, 21, 6709. https://doi.org/10.3390/s21206709
Li I-H, Lin Y-S, Lee L-W, Lin W-T. Design, Manufacturing, and Control of a Pneumatic-Driven Passive Robotic Gait Training System for Muscle-Weakness in a Lower Limb. Sensors. 2021; 21(20):6709. https://doi.org/10.3390/s21206709
Chicago/Turabian StyleLi, I-Hsum, Yi-Shan Lin, Lian-Wang Lee, and Wei-Ting Lin. 2021. "Design, Manufacturing, and Control of a Pneumatic-Driven Passive Robotic Gait Training System for Muscle-Weakness in a Lower Limb" Sensors 21, no. 20: 6709. https://doi.org/10.3390/s21206709