Autonomous Surface and Underwater Vehicles as Effective Ecosystem Monitoring and Research Platforms in the Arctic—The Glider Project †

 , , , ,
, , , ,
Abstract
:1. Introduction
2. Materials and Methods
2.1. Surface and Subsurface Vehicles
2.2. GLIDER Deployment and Data Collection
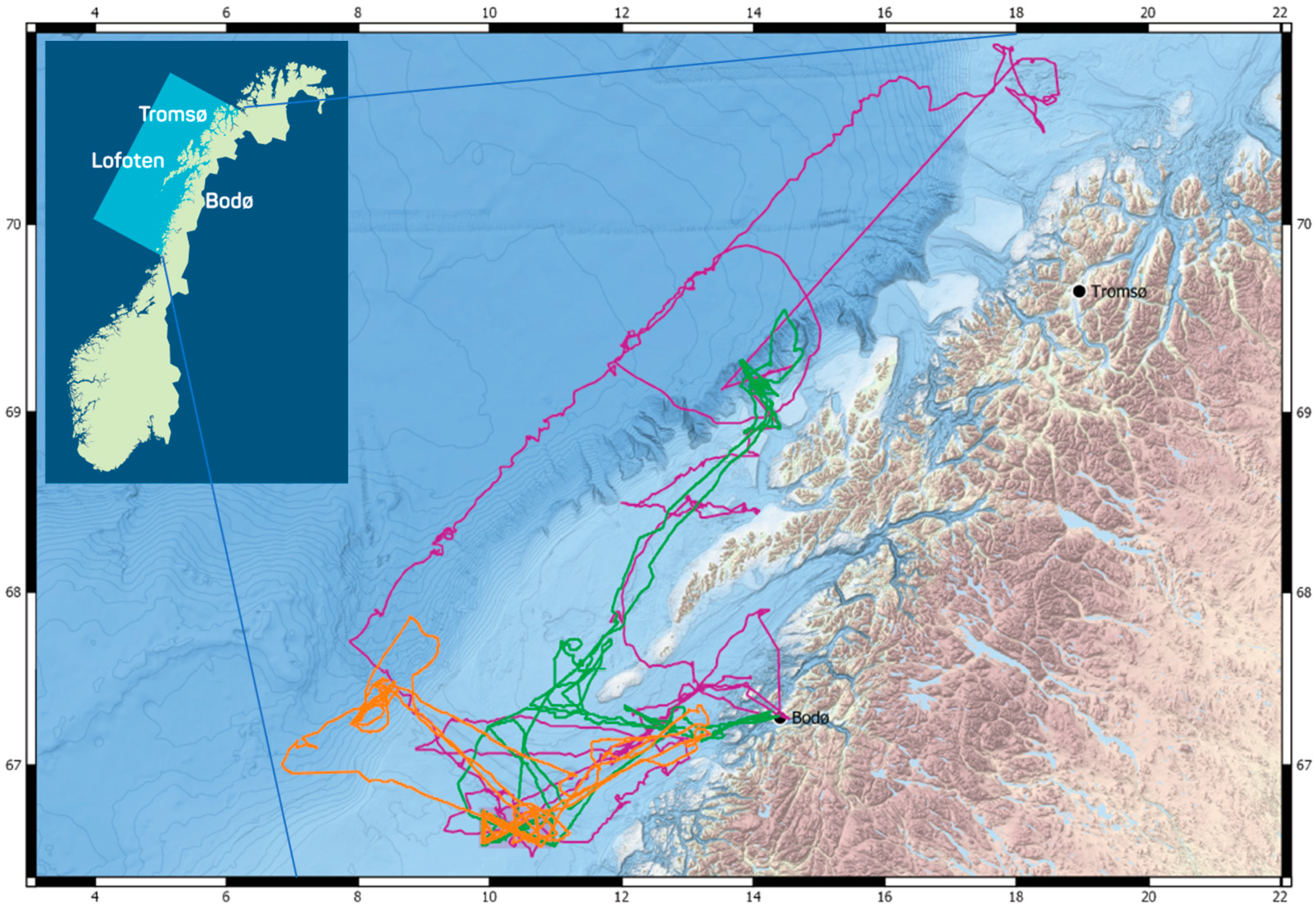
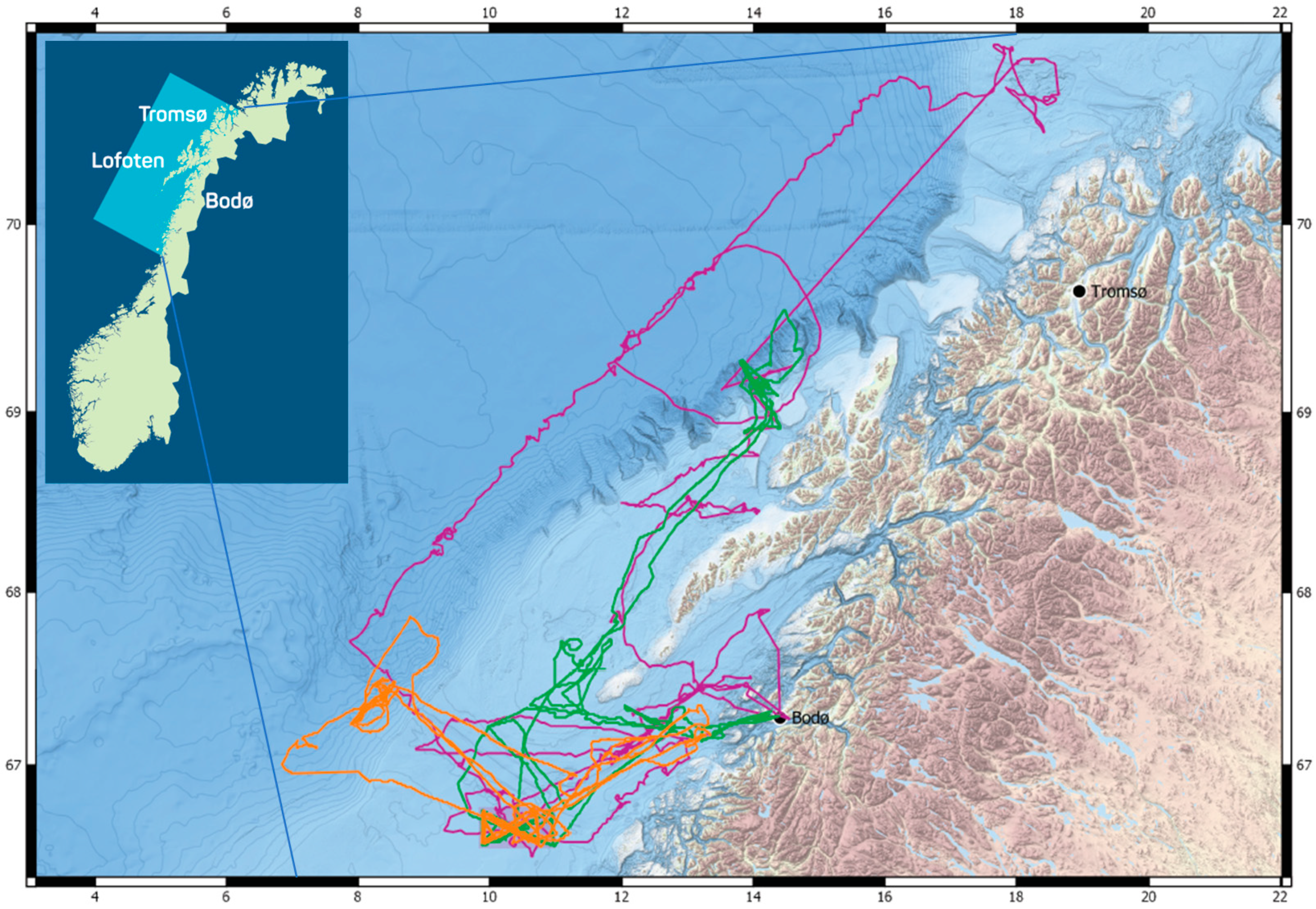
2.2.1. Study Site
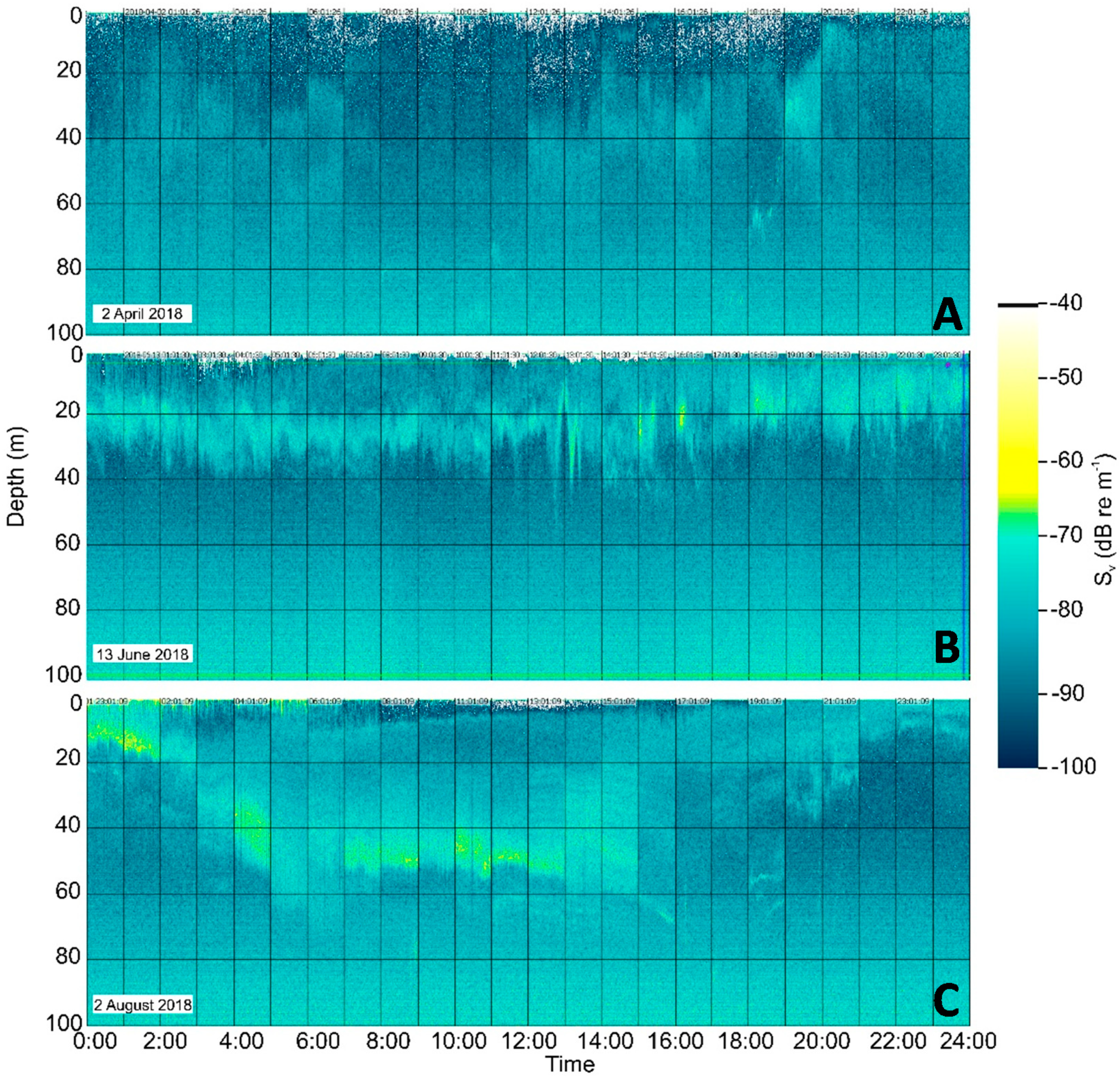
2.2.2. Echo Sounder Mapping of Shallow Zooplankton Layers
2.2.3. Sea Mammal Vocalizations and Anthropogenic Noise
2.2.4. Ocean Modelling
2.3. GLIDER Data Management Platform
3. Results
3.1. GLIDER Environmental Data Recordings
3.2. Echo Sounder Mapping of Shallow Zooplankton Layers
3.3. Sea Mammal Vocalization and Anthropogenic Noise
3.4. Ocean Modeling
4. Discussion
Author Contributions
Funding
Conflicts of Interest
References
- Bigg, G.R.; Jickells, T.D.; Liss, P.S.; Osborn, T.J. The role of the oceans in climate. Int. J. Climatol. 2003, 23, 1127–1159. [Google Scholar] [CrossRef]
- FAO. The State of World Fisheries and Aquaculture 2020. Sustainability in Action; FAO: Rome, Italy, 2020. [Google Scholar]
- Field, C.B.; Behrenfeld, M.J.; Randerson, J.T.; Falkowski, P. Primary production of the biosphere: Integrating terrestrial and oceanic components. Science 1998, 281, 237–240. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- IOC-UNESCO. Global Ocean Science Report 2020—Charting Capacity for Ocean Sustainability; UNESCO Publishing: Paris, France, 2020. [Google Scholar]
- Schmitt, R.W. The ocean’s role in climate. Oceanography 2018, 31, 32–40. [Google Scholar] [CrossRef] [Green Version]
- Visbeck, M. Ocean science research is key for a sustainable future. Nat. Commun. 2018, 9, 4. [Google Scholar] [CrossRef]
- Costello, C.; Cao, L.; Gelcich, S.; Cisneros-Mata, M.Á.; Free, C.M.; Froehlich, H.E.; Golden, C.D.; Ishimura, G.; Maier, J.; Macadam-Somer, I.; et al. The future of food from the sea. Nature 2020, 588, 95–100. [Google Scholar] [CrossRef]
- Jouffray, J.-B.; Blasiak, R.; Norström, A.V.; Österblom, H.; Nyström, M. The blue acceleration: The trajectory of human expansion into the ocean. One Earth 2020, 2, 43–54. [Google Scholar] [CrossRef] [Green Version]
- Winther, J.-G.; Dai, M.; Rist, T.; Hoel, A.H.; Li, Y.; Trice, A.; Morrissey, K.; Juinio-Meñez, M.A.; Fernandes, L.; Unger, S.; et al. Integrated ocean management for a sustainable ocean economy. Nature Ecol. Evol. 2020, 4, 1451–1458. [Google Scholar] [CrossRef]
- Testor, P.; de Young, B.; Rudnick, D.L.; Glenn, S.; Hayes, D.; Lee, C.M.; Pattiaratchi, C.; Hill, K.; Heslop, E.; Turpin, V.; et al. OceanGliders: A component of the integrated GOOS. Front. Mar. Sci. 2019, 6, 32. [Google Scholar] [CrossRef] [Green Version]
- Aniceto, A.S.; Pedersen, G.; Primicerio, R.; Biuw, M.; Lindstrøm, U.; Camus, L. Arctic marine data collection using oceanic gliders: Providing ecological context to cetacean vocalizations. Front. Mar. Sci. 2020, 7, 983. [Google Scholar] [CrossRef]
- Aguzzi, J.; Albiez, J.; Flögel, S.; Godø, O.R.; Grimsbø, E.; Marini, S.; Pfannkuche, O.; Rodriguez, E.; Thomsen, L.; Torkelsen, T.; et al. A flexible autonomous robotic observatory infrastructure for bentho-pelagic monitoring. Sensors 2020, 20, 1614. [Google Scholar] [CrossRef] [Green Version]
- Davis, R.E.; Eriksen, C.C.; Jones, C.P. Autonomous buoyancy-driven underwater gliders. In Technology and Applications of Autonomous Underwater Vehicles; Griffiths, G., Ed.; Taylor & Francis: London, UK, 2002; pp. 37–58. [Google Scholar]
- Lee, C.M.; Thomson, J.; Marginal Ice Zone and Arctic Sea State Teams. An autonomous approach to observing the seasonal ice zone in the Western Arctic. Oceanography 2017, 30, 56–68. [Google Scholar] [CrossRef] [Green Version]
- Whitt, C.; Pearlman, J.; Polagye, B.; Caimi, F.; Muller-Karger, F.; Copping, A.; Spence, H.; Madhusudhana, S.; Kirkwood, W.; Grosjean, L.; et al. Future vision for autonomous ocean observations. Front. Mar. Sci. 2020, 7, 24. [Google Scholar] [CrossRef]
- Höffle, H.; Solemdal, P.; Korsbrekke, K.; Johannessen, M.; Bakkeplass, K.; Kjesbu, O.S. Variability of northeast Arctic cod (Gadus morhua) distribution on the main spawning grounds in relation to biophysical factors. ICES J. Mar. Sci. 2014, 71, 1317–1331. [Google Scholar] [CrossRef]
- Melle, W.; Runge, J.; Head, E.; Plourde, S.; Castellani, C.; Licandro, P.; Pierson, J.; Jonasdottir, S.; Johnson, C.; Broms, C.; et al. The North Atlantic Ocean as habitat for Calanus finmarchicus: Environmental factors and life history traits. Prog. Oceanogr. 2014, 129, 244–284. [Google Scholar] [CrossRef] [Green Version]
- Opdal, A.F.; Vikebo, F.B. Long-term stability in modelled zooplankton influx could uphold major fish spawning grounds on the Norwegian continental shelf. Can. J. Fish. Aquat. Sci. 2016, 73, 189–196. [Google Scholar] [CrossRef]
- Weidberg, N.; Basedow, S.L. Long-term variability in overwintering copepod populations in the Lofoten Basin: The role of the North Atlantic oscillation and trophic effects. Limnol. Oceanogr. 2019, 64, 2044–2058. [Google Scholar] [CrossRef] [Green Version]
- Ministry of Climate and Environment. Norway’s Integrated Ocean Management Plans. Barents Sea–Lofoten Area; the Norwegian Sea; and the North Sea and Skagerrak. Meld. St. 20 (2019–2020) 2020. Available online: https://www.regjeringen.no/contentassets/5570db2543234b8a9834606c33caa900/en-gb/pdfs/stm201920200020000engpdfs.pdf (accessed on 7 October 2021).
- Camus, L.; Pedersen, G.; Falk-Petersen, S.; Dunlop, K.; Daase, M.; Basedow, S.L.; Bandara, K.; Tverberg, V.; Pederick, J.; Peddie, D.; et al. Autonomous surface and underwater vehicles reveal new discoveries in the Arctic Ocean. In Proceedings of the OCEANS 2019 Conference, Marseille, France, 17–20 June 2019; pp. 1–8. [Google Scholar]
- Aguzzi, J.; Chatzievangelou, D.; Company, J.B.; Thomsen, L.; Marini, S.; Bonofiglio, F.; Juanes, F.; Rountree, R.; Berry, A.; Chumbinho, R.; et al. The potential of video imagery from worldwide cabled observatory networks to provide information supporting fish-stock and biodiversity assessment. ICES J. Mar. Sci. 2020, 77, 2396–2410. [Google Scholar] [CrossRef]
- Zuazo, A.; Grinyó, J.; López-Vázquez, V.; Rodríguez, E.; Costa, C.; Ortenzi, L.; Flögel, S.; Valencia, J.; Marini, S.; Zhang, G.; et al. An automated pipeline for image processing and data treatment to track activity rhythms of paragorgia arborea in relation to hydrographic conditions. Sensors 2020, 20, 6281. [Google Scholar] [CrossRef]
- Osterloff, J.; Nilssen, I.; Järnegren, J.; Van Engeland, T.; Buhl-Mortensen, P.; Nattkemper, T.W. Computer vision enables short- and long-term analysis of Lophelia pertusa polyp behaviour and colour from an underwater observatory. Sci. Rep. 2019, 9, 6578. [Google Scholar] [CrossRef] [PubMed]
- Osterloff, J.; Nilssen, I.; Nattkemper, T.W. A computer vision approach for monitoring the spatial and temporal shrimp distribution at the LoVe observatory. Methods Oceanogr. 2016, 15–16, 114–128. [Google Scholar] [CrossRef]
- Chatzievangelou, D.; Bahamon, N.; Martini, S.; del Rio, J.; Riccobene, G.; Tangherlini, M.; Danovaro, R.; De Leo, F.C.; Pirenne, B.; Aguzzi, J. Integrating diel vertical migrations of bioluminescent deep scattering layers into monitoring programs. Front. Mar. Sci. 2021, 8, 615. [Google Scholar] [CrossRef]
- Griffiths, J.R.; Kadin, M.; Nascimento, F.J.A.; Tamelander, T.; Törnroos, A.; Bonaglia, S.; Bonsdorff, E.; Brüchert, V.; Gårdmark, A.; Järnström, M.; et al. The importance of benthic–pelagic coupling for marine ecosystem functioning in a changing world. Global Change Biol. 2017, 23, 2179–2196. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Thomsen, L.; Aguzzi, J.; Costa, C.; De Leo, F.; Ogston, A.; Purser, A. The oceanic biological pump: Rapid carbon transfer to depth at Continental Margins during Winter. Sci. Rep. 2017, 7, 10763. [Google Scholar] [CrossRef] [Green Version]
- Rountree, R.; Aguzzi, J.; Marini, S.; Fanelli, E.; De Leo, F.; del Rio, J.; Juanes, F. Towards an optimal design for ecosystem-level ocean observatories. In Oceanography and Marine Biology: An Annual Review; Hawkins, S.J., Allcock, A.L., Bates, A.E., Evans, A.J., Firth, L.B., McQuaid, C.D., Russell, B.D., Smith, I.P., Swearer, S.E., Todd, P.A., Eds.; Taylor & Francis: Milton Park, UK, 2020; Volume 58, pp. 79–105. [Google Scholar]
- Danovaro, R.; Aguzzi, J.; Fanelli, E.; Billett, D.; Gjerde, K.; Jamieson, A.; Ramirez-Llodra, E.; Smith, C.R.; Snelgrove, P.V.R.; Thomsen, L.; et al. An ecosystem-based deep-ocean strategy. Science 2017, 355, 452–454. [Google Scholar] [CrossRef] [PubMed]
- Eriksen, C.C.; Osse, T.J.; Light, R.D.; Wen, T.; Lehman, T.W.; Sabin, P.L.; Ballard, J.W.; Chiodi, A.M. Seaglider: A long-range autonomous underwater vehicle for oceanographic research. IEEE J. Ocean. Eng. 2001, 26, 424–436. [Google Scholar] [CrossRef] [Green Version]
- Konsberg Seaglider. Available online: https://www.kongsberg.com/globalassets/maritime/km-products/documents/seaglider_product_specification.pdf (accessed on 7 October 2021).
- Manley, J.; Willcox, S. The Wave Glider: A persistent platform for ocean science. In Proceedings of the OCEANS’10 Conference, Sydney, NSW, Australia, 24–27 May 2010; pp. 1–5. [Google Scholar]
- Robotics, L. The Wave Glider Spec Sheet. Available online: https://www.info.liquid-robotics.com/wave-glider-spec-sheet (accessed on 7 October 2021).
- Ghani, M.H.; Hole, L.R.; Fer, I.; Kourafalou, V.H.; Wienders, N.; Kang, H.; Drushka, K.; Peddie, D. The SailBuoy remotely-controlled unmanned vessel: Measurements of near surface temperature, salinity and oxygen concentration in the Northern Gulf of Mexico. Methods Oceanogr. 2014, 10, 104–121. [Google Scholar] [CrossRef] [Green Version]
- Offshore Sensing AS. The Sailbuoy. Available online: www.sailbuoy.no/images/datasheet/Sailbuoy_datasheet.pdf (accessed on 7 October 2021).
- Fregosi, S.; Harris, D.V.; Matsumoto, H.; Mellinger, D.K.; Barlow, J.; Baumann-Pickering, S.; Klinck, H. Detections of whale vocalizations by simultaneously deployed bottom-moored and deep-water mobile autonomous hydrophones. Front. Mar. Sci. 2020, 7, 18. [Google Scholar] [CrossRef]
- Boss, E.; Waite, A.; Muller-Karger, F.; Yamazaki, H.; Wanninkhof, R.; Uitz, J.; Thomalla, S.; Sosik, H.; Sloyan, B.; Richardson, A.; et al. Beyond chlorophyll fluorescence: The time is right to expand biological measurements in ocean observing programs. Limnol. Oceanogr. Bull. 2018, 27, 89–90. [Google Scholar] [CrossRef] [Green Version]
- Basedow, S.L.; McKee, D.; Lefering, I.; Gislason, A.; Daase, M.; Trudnowska, E.; Egeland, E.S.; Choquet, M.; Falk-Petersen, S. Remote sensing of zooplankton swarms. Sci. Rep. 2019, 9, 686. [Google Scholar] [CrossRef]
- Slagstad, D.; Tande, K.S. The importance of seasonal vertical migration in across shelf transport of Calanus finmarchicus. Ophelia 1996, 44, 189–205. [Google Scholar] [CrossRef]
- Bachiller, E.; Skaret, G.; Nøttestad, L.; Slotte, A. Feeding ecology of Northeast Atlantic mackerel, Norwegian spring-spawning herring and blue whiting in the Norwegian Sea. PLoS ONE 2016, 11, e0149238. [Google Scholar] [CrossRef] [Green Version]
- Eiane, K.; Espinasse, M.; Espinasse, B. Environmental effects on zooplankton abundance on a sub-Arctic shelf off northern Norway. Aquat. Biol. 2018, 27, 75–86. [Google Scholar] [CrossRef]
- Olsen, E.; Aanes, S.; Mehl, S.; Holst, J.C.; Aglen, A.; Gjøsæter, H. Cod, haddock, saithe, herring, and capelin in the Barents Sea and adjacent waters: A review of the biological value of the area. ICES J. Mar. Sci. 2009, 67, 87–101. [Google Scholar] [CrossRef]
- Jourdain, E.; Vongraven, D. Humpback whale (Megaptera novaeangliae) and killer whale (Orcinus orca) feeding aggregations for foraging on herring (Clupea harengus) in Northern Norway. Mamm. Biol. 2017, 86, 27–32. [Google Scholar] [CrossRef]
- Koszalka, I.; LaCasce, J.H.; Andersson, M.; Orvik, K.A.; Mauritzen, C. Surface circulation in the Nordic Seas from clustered drifters. Deep-Sea Res. Part I 2011, 58, 468–485. [Google Scholar] [CrossRef]
- Børve, E.; Isachsen, P.E.; Nøst, O.A. Rectified tidal transport in Lofoten-Vesterålen, Northern Norway. Ocean Sci. Discuss. 2021, 2021, 1–33. [Google Scholar]
- Raj, R.P.; Johannessen, J.A.; Eldevik, T.; Nilsen, J.E.Ø.; Halo, I. Quantifying mesoscale eddies in the Lofoten Basin. J. Geophys. Res. Ocean. 2016, 121, 4503–4521. [Google Scholar] [CrossRef]
- Andrade, H.; van der Sleen, P.; Black, B.A.; Godiksen, J.A.; Locke, W.L.; Carroll, M.L.; Ambrose, W.G.; Geffen, A. Ontogenetic movements of cod in Arctic fjords and the Barents Sea as revealed by otolith microchemistry. Polar Biol. 2020, 43, 409–421. [Google Scholar] [CrossRef]
- Pedersen, G.; Falk-Petersen, S.; Dunlop, K.; Camus, L.; Daase, M.; Basedow, S.L.; Bandara, K.; Tverberg, V.; Pederick, J.; Peddie, D. Autonomous surface vehicles for persistent acoustic monitoring of zooplankton in a highly productive shelf area. In Proceedings of the OCEANS 2019 Conference, Marseille, France, 17–20 June 2019; pp. 1–7. [Google Scholar]
- Moloney, J.; Cole, A.; Hillis, C.; Kowarski, K.; MacDonald, B.; Pedersen, G.; Tassara, L.; Camus, L. Observer/amar g4 passive acoustic monitoring system for autonomous maritime observation. In Proceedings of the 2018 IEEE/OES Autonomous Underwater Vehicle Workshop (AUV), Porto, Portugal, 6–9 November 2018; pp. 1–9. [Google Scholar]
- Mordy, C.W.; Cokelet, E.D.; De Robertis, A.; Jenkins, R.; Kuhn, C.E.; Lawrence-Slavas, N.; Berchok, C.L.; Crance, J.L.; Sterling, J.T.; Cross, J.N.; et al. Advances in ecosystem research: Saildrone surveys of oceanography, fish, and marine mammals in the Bering Sea. Oceanography 2017, 30, 113–115. [Google Scholar] [CrossRef]
- Gillespie, D.; Mellinger, D.K.; Gordon, J.; McLaren, D.; Redmond, P.; McHugh, R.; Trinder, P.; Deng, X.Y.; Thode, A. PAMGUARD: Semiautomated, open source software for real-time acoustic detection and localization of cetaceans. J. Acoust. Soc. Am. 2009, 125, 2547. [Google Scholar] [CrossRef]
- Bioacoustics, C.f.C. Raven Pro: Interactive Sound Analysis Software; The Cornell Lab of Ornithology: Ithaca, NY, USA, 2019. [Google Scholar]
- Ghaffari, P.; Isachsen, P.E.; Nøst, O.A.; Weber, J.E. The influence of topography on the stability of the Norwegian Atlantic Current off Northern Norway. J. Phys. Oceanogr. 2018, 48, 2761–2777. [Google Scholar] [CrossRef]
- Röhrs, J.; Sperrevik, A.; Christensen, K. NorShelf: A Reanalysis and Data-Assimilative Forecast Model for the Norwegian Shelf Sea; Norwegian Metheorogical Institute: Oslo, Norway, 2018. [Google Scholar]
- Sperrevik, A.K.; Christensen, K.H.; Röhrs, J. Constraining energetic slope currents through assimilation of high-frequency radar observations. Ocean Sci. 2015, 11, 237–249. [Google Scholar] [CrossRef] [Green Version]
- Ghaffari, P.; Sperrevik, A.; Nøst, O.A.; Christensen, K.H.; Camus, L. Complementary role of Glider data on the modelling of multi-scale dynamics in the Norwegian coastal and fjord regions. In Proceedings of the OCEANS 2019 Conference, Marseille, France, 17–20 June 2019; pp. 1–6. [Google Scholar]
- Chen, C.; Liu, H.; Beardsley, R.C. An unstructured grid, finite-volume, three-dimensional, primitive equations ocean model: Application to coastal ocean and estuaries. J. Atmos. Ocean. Technol. 2003, 20, 159–186. [Google Scholar] [CrossRef]
- Langeland, T.; Cook, J.; Tjøstheim, S.; Kristiansen, T.; Fonnes, G.; Lampe, O.D.; Pedersen, G.; Camus, L. A data management platform for data harvesting and analysis from autonomous marine measurement platforms. In Proceedings of the OCEANS 2019 Conference, Marseille, France, 17–20 June 2019; pp. 1–5. [Google Scholar]
- Buja, A.; McDonald, J.A.; Michalak, J.; Stuetzle, W. Interactive data visualization using focusing and linking. In Proceedings of the 2nd conference on Visualization ‘91, San Diego, CA, USA, 22–25 October 1991; IEEE Computer Society Press: San Diego, CA, USA, 1991; pp. 156–163. [Google Scholar]
- Pierre, J.; Oystein, H.D.; Jani, R.; Birgitta, L.A.; Sabine, M.; Trond, K.; Seppo, K.; Antoine, M. Quality Control of Biogeochemical Measurements within Copernicus in situ TAC. Available online: https://archimer.ifremer.fr/doc/00251/36232/ (accessed on 25 January 2021).
- Böhm, E.; Riminucci, F.; Bortoluzzi, G.; Colella, S.; Acri, F.; Santoleri, R.; Ravaioli, M. Operational use of continuous surface fluorescence measurements offshore Rimini to validate satellite-derived chlorophyll observations. J. Oper. Oceanogr. 2016, 9 (Suppl. 1), s167–s175. [Google Scholar] [CrossRef] [Green Version]
- Thomalla, S.J.; Moutier, W.; Ryan-Keogh, T.J.; Gregor, L.; Schütt, J. An optimized method for correcting fluorescence quenching using optical backscattering on autonomous platforms. Limnol. Oceanogr. Methods 2018, 16, 132–144. [Google Scholar] [CrossRef]
- Xing, X.; Claustre, H.; Blain, S.; D’Ortenzio, F.; Antoine, D.; Ras, J.; Guinet, C. Quenching correction for in vivo chlorophyll fluorescence acquired by autonomous platforms: A case study with instrumented elephant seals in the Kerguelen region (Southern Ocean). Limnol. Oceanogr. Methods 2012, 10, 483–495. [Google Scholar] [CrossRef] [Green Version]
- Maxwell, K.; Johnson, G.N. Chlorophyll fluorescence—A practical guide. J. Exp. Bot. 2000, 51, 659–668. [Google Scholar] [CrossRef]
- Broms, F.; Wenzel, F.; Suarez, P.L.; Stevick, P.; Biuw, M.; Jann, B.; Bouveret, L.; Rikardsen, A.; Ryan, C.; Berrow, S. Recent research on the migratory destinations of humpback whales (Megaptera novaeangliae) from a mid-winter feeding stop-over area in Northern Norway. In Proceedings of the 29th ECS Conference, St. Julian’s, Malta, 23–25 March 2015. [Google Scholar]
- Horton, T.W.; Zerbini, A.N.; Andriolo, A.; Danilewicz, D.; Sucunza, F. Multi-decadal humpback whale migratory route fidelity despite oceanographic and geomagnetic change. Front. Mar. Sci. 2020, 7, 414. [Google Scholar] [CrossRef]
- Andrade, H.; Massabuau, J.-C.; Cochrane, S.; Ciret, P.; Tran, D.; Sow, M.; Camus, L. High frequency non-invasive (HFNI) bio-sensors as a potential tool for marine monitoring and assessments. Front. Mar. Sci. 2016, 3, 187. [Google Scholar] [CrossRef]
- Scalabrin, C.; Marfia, C.; Boucher, J. How much fish is hidden in the surface and bottom acoustic blind zones? ICES J. Mar. Sci. 2009, 66, 1355–1363. [Google Scholar] [CrossRef] [Green Version]
- Berge, J.; Geoffroy, M.; Daase, M.; Cottier, F.; Priou, P.; Cohen, J.H.; Johnsen, G.; McKee, D.; Kostakis, I.; Renaud, P.E.; et al. Artificial light during the polar night disrupts Arctic fish and zooplankton behaviour down to 200 m depth. Commun. Biol. 2020, 3, 102. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ludvigsen, M.; Berge, J.; Geoffroy, M.; Cohen, J.H.; De La Torre, P.R.; Nornes, S.M.; Singh, H.; Sørensen, A.J.; Daase, M.; Johnsen, G. Use of an autonomous surface vehicle reveals small-scale diel vertical migrations of zooplankton and susceptibility to light pollution under low solar irradiance. Sci. Adv. 2018, 4, eaap9887. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Peña, M. Mesopelagic fish avoidance from the vessel dynamic positioning system. ICES J. Mar. Sci. 2018, 76, 734–742. [Google Scholar] [CrossRef]
- Ramm, T. Hungry during Migration? Humpback Whale Movement from the Barents Sea to a Feeding Stopover in Northern Norway Revealed by Photo-ID Analysis; UiT Norges Arktiske Universitet: Tromsø, Norway, 2020. [Google Scholar]
- Hildebrand, J.A. Anthropogenic and natural sources of ambient noise in the ocean. Mar. Ecol. Prog. Ser. 2009, 395, 5–20. [Google Scholar] [CrossRef] [Green Version]
- Zhang, G.; Forland, T.N.; Johnsen, E.; Pedersen, G.; Dong, H. Measurements of underwater noise radiated by commercial ships at a cabled ocean observatory. Mar. Pollut. Bull. 2020, 153, 110948. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Manufacturer | Sensor | Variables |
|---|---|---|
| Wave Glider | ||
| Kongsberg Maritime | WBT Mini echo sounder (ES70-18CD, ES333-7CDK split | Acoustic backscatter |
| LiCor | Light Sensor Li1500 | Photosynthetically active radiation in air |
| SAIV | SAIV-SD204 | Salinity, temperature, density |
| Seapoint (on SAIV CTD) | Seapoint Turbidity Meter | Turbidity |
| Seapoint (on SAIV CTD) | Seapoint Chlorophyll Fluorometer | CHl-a |
| Aanderaa Xylem | Optode 4831 | Oxygen |
| Aanderaa Xylem | Submersible CO2 4797 | pCO2 |
| Airmar | Airmar 200WX | Wind speed and direction, air temperature, barometric pressure |
| Ocean Instruments | Soundtrap HF hydrophone (parts of the deployment) | Underwater sound |
| Sailbuoy | ||
| Kongsberg Maritime | WBT Mini echo sounder (ES333-7CDK split) | Acoustic backscatter |
| Neil Brown Ocean Sensors | NBOSI Cabled CT sensor | Salinity, temperature, density |
| Aanderaa Xylem | Optode 4831 | Oxygen, temperature |
| Seaglider® | ||
| Sea-Bird Scientific | SeaBird CT-Sail | Temperature, conductivity |
| Discontinued (formerly Kongsberg Maritime Contros) | CONTROS HydroFlash® O2 optode | Oxygen |
| Sea-Bird Scientific | SeaOWL UV-A | Total particulate concentration |
| Sea-Bird Scientific | SeaOWL UV-A | CHl-a |
| Sea-Bird Scientific | SeaOWL UV-A | FDOM fluorescence |
| JASCO | Observer/AMARG4 | Underwater sound |
| Month | Temperature (°C) | Salinity (ppt) | O2 Saturation (%) |
|---|---|---|---|
| April | 4.5 +/− 0.7 | 33.6 +/− 0.2 | 101.2 +/− 2.1 |
| May | 8.6 +/− 0.4 | 33.5 +/− 0.0 | 110.0 +/− 1.6 |
| July | 14.1 +/− 0.1 | 34.5 +/− 0.0 | 104.7 +/− 0.6 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Camus, L.; Andrade, H.; Aniceto, A.S.; Aune, M.; Bandara, K.; Basedow, S.L.; Christensen, K.H.; Cook, J.; Daase, M.; Dunlop, K.; et al. Autonomous Surface and Underwater Vehicles as Effective Ecosystem Monitoring and Research Platforms in the Arctic—The Glider Project. Sensors 2021, 21, 6752. https://doi.org/10.3390/s21206752
Camus L, Andrade H, Aniceto AS, Aune M, Bandara K, Basedow SL, Christensen KH, Cook J, Daase M, Dunlop K, et al. Autonomous Surface and Underwater Vehicles as Effective Ecosystem Monitoring and Research Platforms in the Arctic—The Glider Project. Sensors. 2021; 21(20):6752. https://doi.org/10.3390/s21206752
Chicago/Turabian StyleCamus, Lionel, Hector Andrade, Ana Sofia Aniceto, Magnus Aune, Kanchana Bandara, Sünnje Linnéa Basedow, Kai Håkon Christensen, Jeremy Cook, Malin Daase, Katherine Dunlop, and et al. 2021. "Autonomous Surface and Underwater Vehicles as Effective Ecosystem Monitoring and Research Platforms in the Arctic—The Glider Project" Sensors 21, no. 20: 6752. https://doi.org/10.3390/s21206752
APA StyleCamus, L., Andrade, H., Aniceto, A. S., Aune, M., Bandara, K., Basedow, S. L., Christensen, K. H., Cook, J., Daase, M., Dunlop, K., Falk-Petersen, S., Fietzek, P., Fonnes, G., Ghaffari, P., Gramvik, G., Graves, I., Hayes, D., Langeland, T., Lura, H., ... Dahle, S. (2021). Autonomous Surface and Underwater Vehicles as Effective Ecosystem Monitoring and Research Platforms in the Arctic—The Glider Project. Sensors, 21(20), 6752. https://doi.org/10.3390/s21206752