
A Novel Method for the Accurate Measurement of Soil Infiltration Line by Portable Vector Network Analyzer


Abstract
:1. Introduction
2. Materials and Methods
2.1. Conversion from Time Domain to Frequency Domain
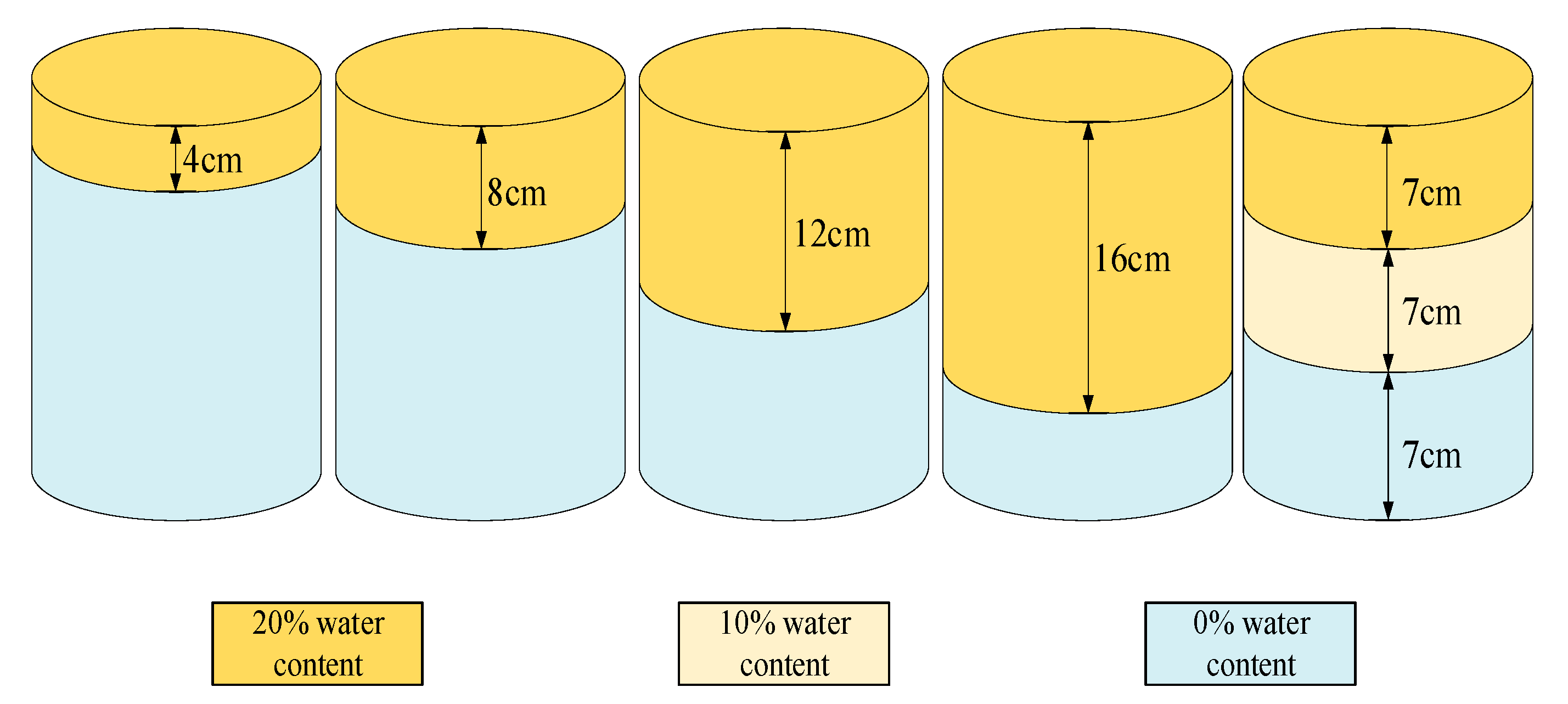
2.2. Experimental Preparation
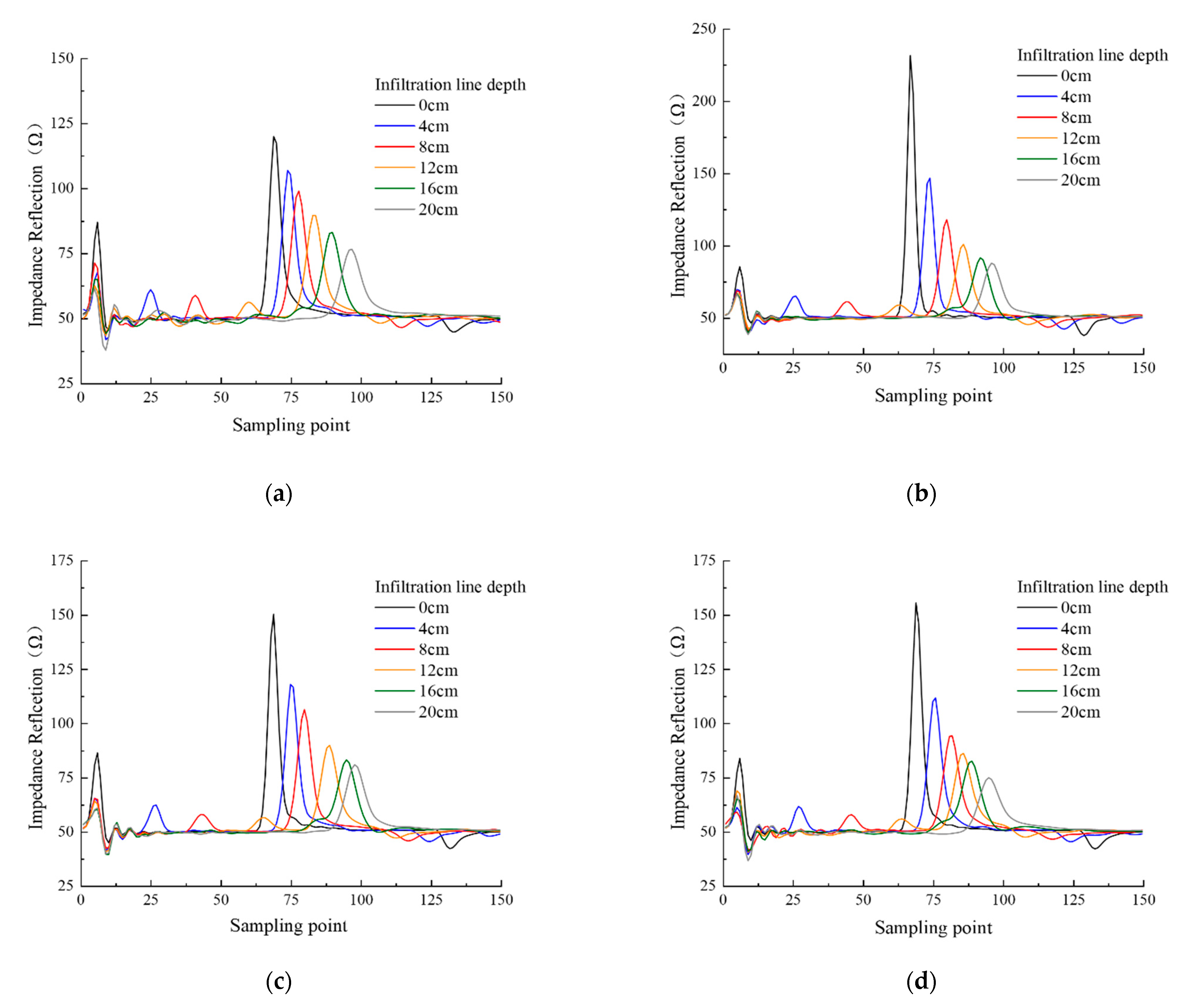
3. Results
3.1. Infiltration Line of Soil with Two-Layer
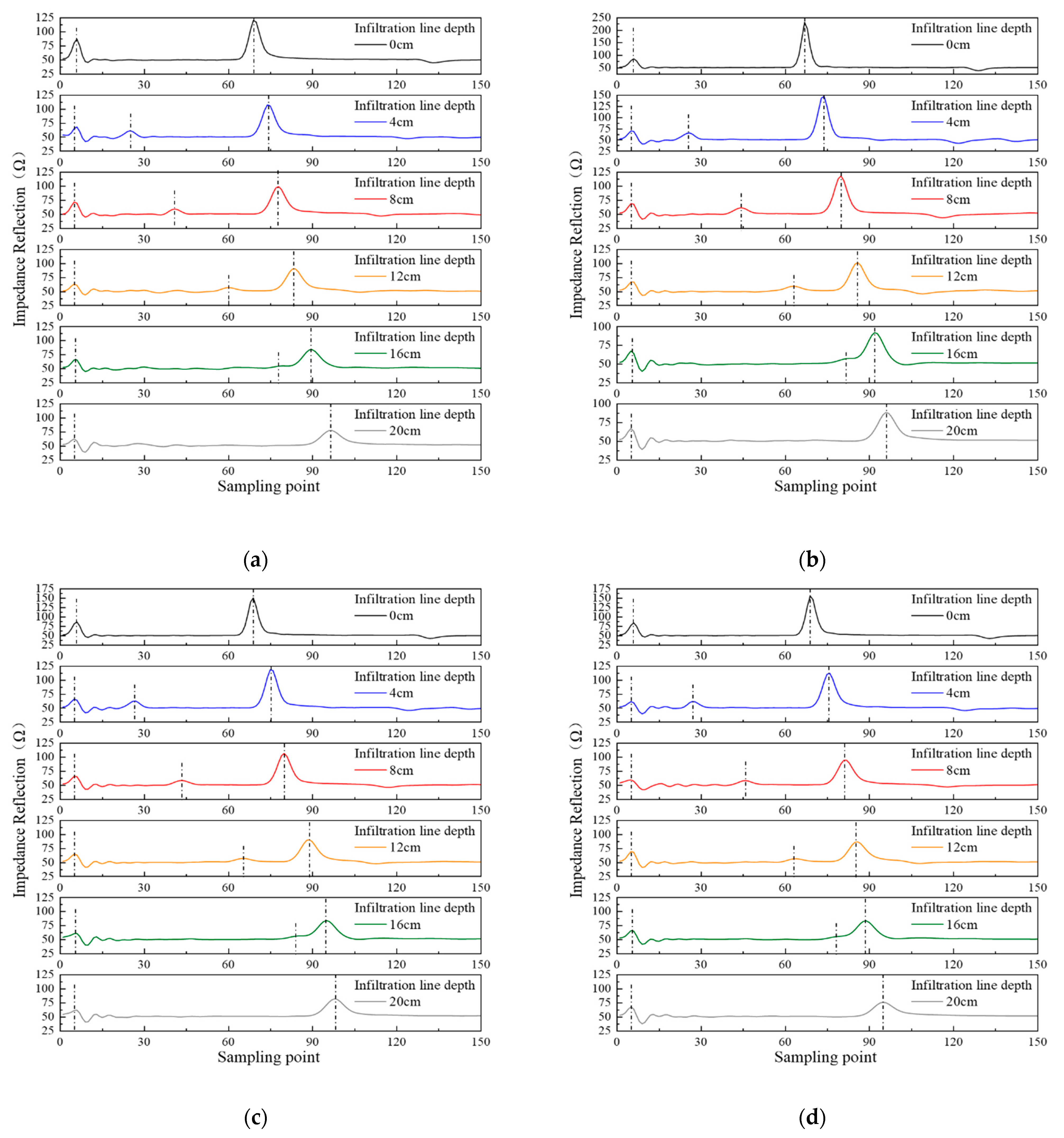
3.2. Three-Layer Soil Infiltration Line Measurement
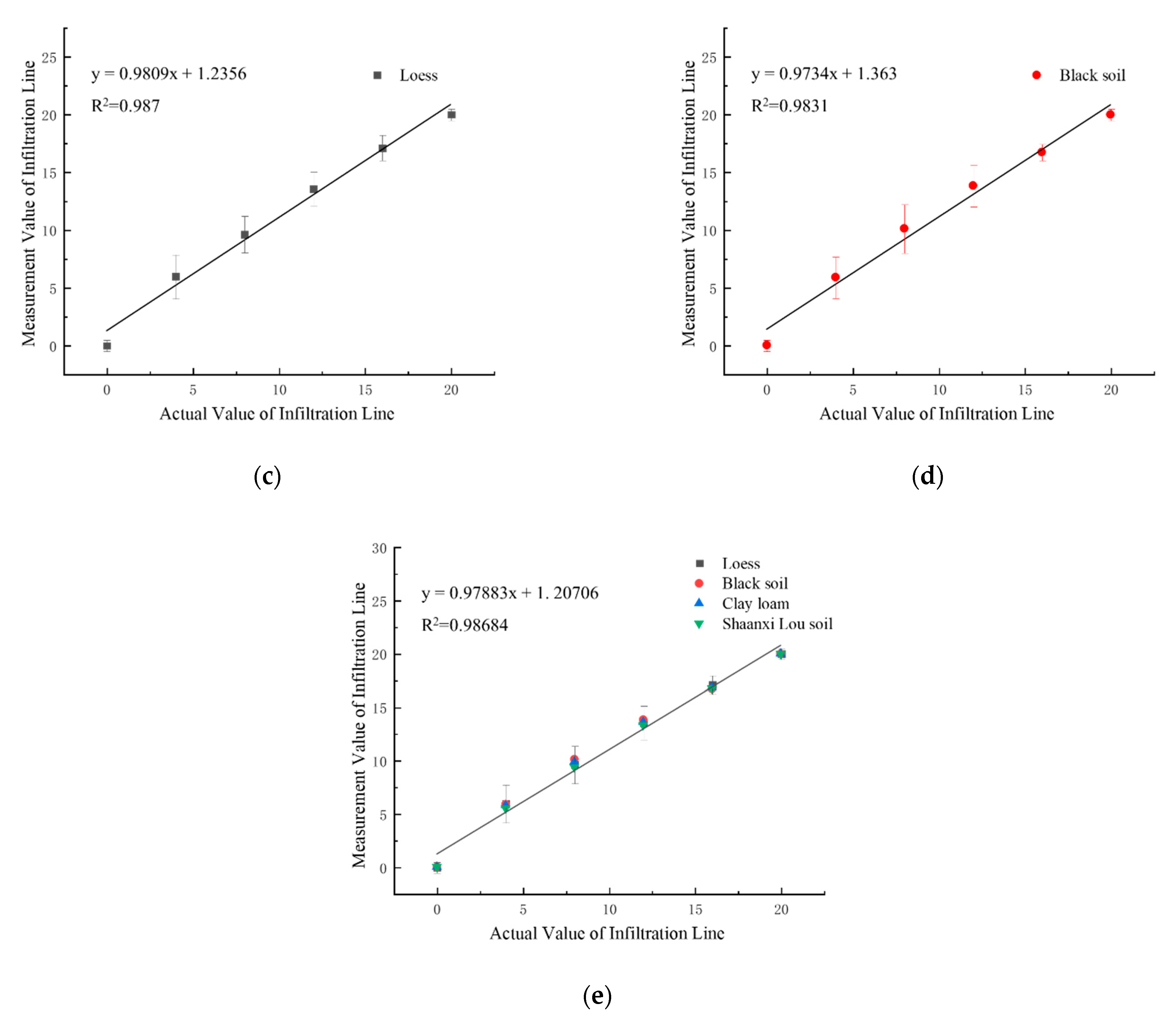
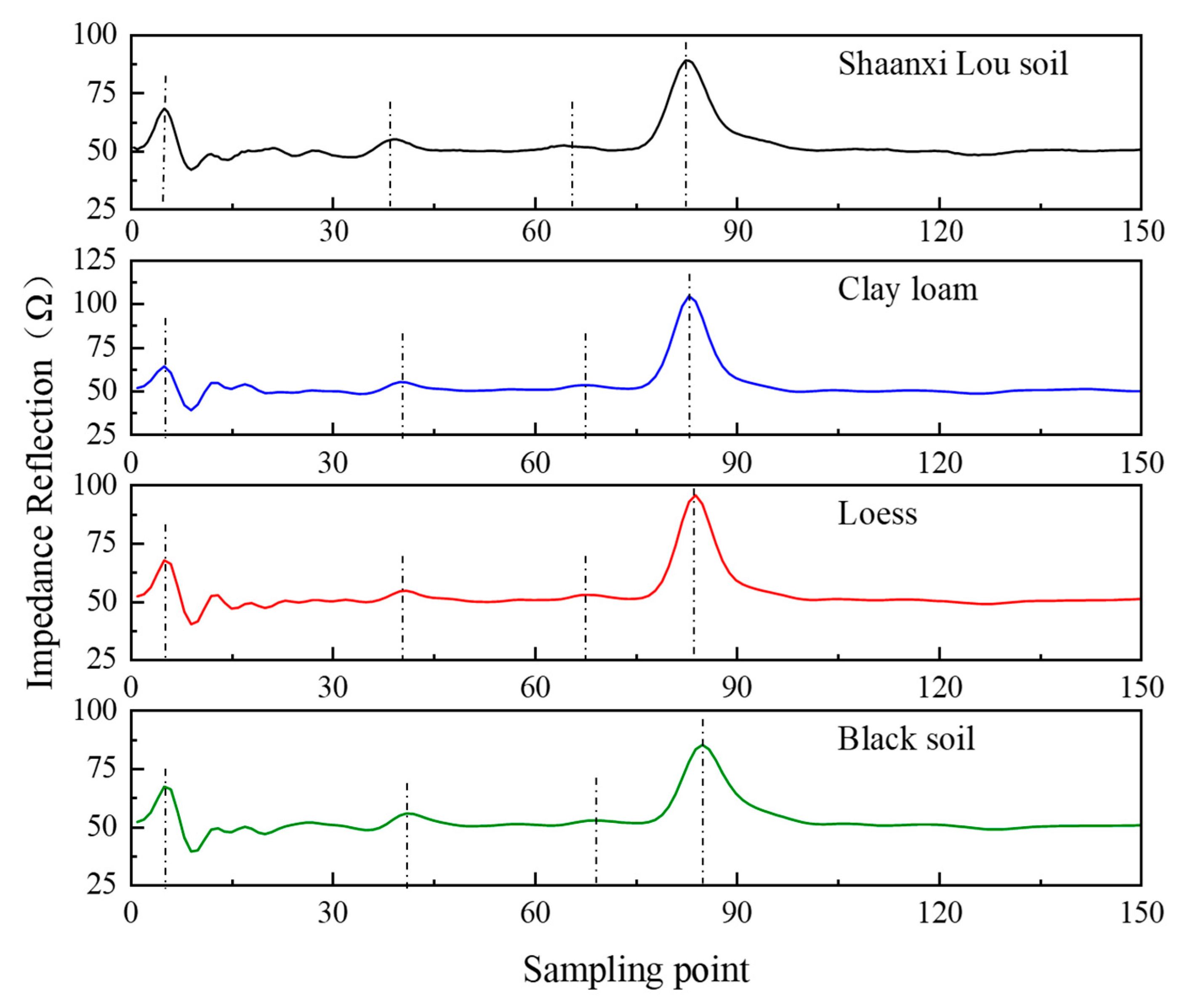
3.3. Universal Adaptability Analysis
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Toll, D.G. A Conceptual Model for the Drying and Wetting of Soil. Proc. Int. Conf. Unsaturated Soils 1995, 2, 805–810. [Google Scholar]
- Usowicz, B.; Jerzy, L. Spatial Variability of Saturated Hydraulic Conductivity and Its Links with Other Soil Properties at the Regional Scale. Sci. Rep. 2021, 11, 8293. [Google Scholar] [CrossRef] [PubMed]
- Iqbal, A.; He, L.; Izhar, A.; Saif, U.; Aziz, K.; Kashif, A.; Wei, S.; Shah, F.; Rayyan, K.; Ligeng, J. Co-Incorporation of Manure and Inorganic Fertilizer Improves Leaf Physiological Traits, Rice Production and Soil Functionality in a Paddy Field. Sci. Rep. 2021, 11, 10048. [Google Scholar] [CrossRef] [PubMed]
- Aggarwal, P.; Ranjan, B.; Amit, K.M.; Das, T.K.; Šimůnek, J.; Pramanik, P.; Sudhishri, S.; Vashisth, A.; Krishnan, P.; Chakraborty, D.; et al. Modelling Soil Water Balance and Root Water Uptake in Cotton Grown under Different Soil Conservation Practices in the Indo-Gangetic Plain. Agric. Ecosyst. Environ. 2017, 240, 287–299. [Google Scholar] [CrossRef] [Green Version]
- Ibragimov, N.; Avliyakulov, M.; Durdiev, N.; Evett, S.R.; Gopporov, F.; Yakhyoeva, N. Cotton Irrigation Scheduling Improvements Using Wetting Front Detectors in Uzbekistan. Agric. Water Manag. 2021, 244, 106538. [Google Scholar] [CrossRef]
- Shi, J.; Wu, X.; Wamg, X.; Zhang, M.; Han, L.; Zhang, W.; Liu, W.; Zuo, Q.; Wu, X.; Zhang, H.; et al. Determining Threshold Values for Root-Soil Water Weighted Plant Water Deficit Index Based Smart Irrigation. Agric. Water Manag. 2020, 230, 105979. [Google Scholar] [CrossRef]
- Queiroz, M.; Silva, T.; Zolnier, S.; Jardim, A.; Souza, C.; Júnior, G.; Morais, J.; Souza, L. Spatial and Temporal Dynamics of Soil Moisture for Surfaces with a Change in Land Use in the Semi-Arid Region of Brazil. CATENA 2020, 188, 104457. [Google Scholar] [CrossRef]
- Leuther, F.; Weller, U.; Wallach, R.; Vogel, H.J. Quantitative Analysis of Wetting Front Instabilities in Soil Caused by Treated Waste Water Irrigation. Geoderma 2018, 319, 132–141. [Google Scholar] [CrossRef]
- Han, D.; Wang, G.; Liu, T.; Xue, B.; George, K.; Xu, X. Hydroclimatic Response of Evapotranspiration Partitioning to Prolonged Droughts in Semiarid Grassland. J. Hydrol. 2018, 563, 766–777. [Google Scholar] [CrossRef]
- Zhang, Y.; Shen, Y.; Sun, H.; John, B.G. Evapotranspiration and Its Partitioning in an Irrigated Winter Wheat Field: A Combined Isotopic and Micrometeorologic Approach. J. Hydrol. 2011, 408, 203–211. [Google Scholar] [CrossRef]
- Clarke, D.; Hess, T.M.; Haro-Monteagudo, D.; Semenov, M.A.; Knox, J.W. Assessing Future Drought Risks and Wheat Yield Losses in England. Agric. For. Meteorol. 2021, 297, 108248. [Google Scholar] [CrossRef]
- Wang, J.; Chen, X.; Hu, Q.; Liu, J. Responses of Terrestrial Water Storage to Climate Variation in the Tibetan Plateau. J. Hydrol. 2020, 584, 124652. [Google Scholar] [CrossRef]
- Pakparvar, M.; Hashemi, H.; Rezaei, M.; Cornelis, W.M.; Nekooeian, G.; Kowsar, S.A. Artificial Recharge Efficiency Assessment by Soil Water Balance and Modelling Approaches in a Multi-Layered Vadose Zone in a Dry Region. Hydrol. Sci. J. 2018, 63, 1183–1202. [Google Scholar] [CrossRef]
- Stirzaker, R.J.; Hutchinson, P.A. Irrigation Controlled by a Wetting Front Detector: Field Evaluation under Sprinkler Irrigation. Soil Res. 2005, 43, 935–943. [Google Scholar] [CrossRef] [Green Version]
- Stirzaker, R.J. When to Turn the Water Off: Scheduling Micro-Irrigation with a Wetting Front Detector. Irrig. Sci. 2003, 22, 177–185. [Google Scholar] [CrossRef]
- Eltohamy, K.M.; Liu, C.; Khan, S.; Niyungeko, C.; Jin, Y.; Hosseini, S.H.; Li, F.; Liang, X. An Internet-Based Smart Irrigation Approach for Limiting Phosphorus Release from Organic Fertilizer-Amended Paddy Soil. J. Clean. Prod. 2021, 293, 126254. [Google Scholar] [CrossRef]
- Ahmad, M.; Chakraborty, D.; Aggarwal, P.; Bhattacharyya, B.; Singh, R. Modelling Soil Water Dynamics and Crop Water Use in a Soybean-Wheat Rotation under Chisel Tillage in a Sandy Clay Loam Soil. Geoderma 2018, 327, 13–24. [Google Scholar] [CrossRef]
- Zhao, Z.; Wang, H.; Qin, D.; Wang, C. Large-Scale Monitoring of Soil Moisture Using Temperature Vegetation Quantitative Index (Tvqi) and Exponential Filtering: A Case Study in Beijing. Agric. Water Manag. 2021, 252, 106896. [Google Scholar] [CrossRef]
- Li, T.; Shao, M.; Jia, Y.; Jia, X.; Huang, L. Profile Distribution of Soil Moisture in the Gully on the Northern Loess Plateau, China. CATENA 2018, 171, 460–468. [Google Scholar] [CrossRef]
- Guo, F.; Wang, Y.; Hou, T.; Zhang, L.; Mu, Y.; Wu, F. Variation of Soil Moisture and Fine Roots Distribution Adopts Rainwater Collection, Infiltration Promoting and Soil Anti-Seepage System (Rcip-Sa) in Hilly Apple Orchard on the Loess Plateau of China. Agric. Water Manag. 2021, 244, 106573. [Google Scholar] [CrossRef]
- Sonkar, I.; Kotnoor, H.P.; Sen, S. Estimation of Root Water Uptake and Soil Hydraulic Parameters from Root Zone Soil Moisture and Deep Percolation. Agric. Water Manag. 2019, 222, 38–47. [Google Scholar] [CrossRef]
- Shiri, J.; Karimi, B.; Karimi, N.; Kazemi, M.H.; Karimi, S. Simulating Wetting Front Dimensions of Drip Irrigation Systems: Multi Criteria Assessment of Soft Computing Models. J. Hydrol. 2020, 585, 124792. [Google Scholar] [CrossRef]
- Hachimi, M.; Maslouhi, A.; Qanza, H.; Tamoh, K. Numerical Methods for Estimating the Soil Hydraulic Properties and the Wetting Front in the Soil. Eurasian Soil Sci. 2019, 52, 1402–1413. [Google Scholar] [CrossRef]
- Feng, W.; Lin, C.P.; Deschamps, R.J.; Drnevich, V.P. Theoretical Model of a Multisection Time Domain Reflectometry Measurement System. Water Resour. Res. 1999, 35, 2321–2331. [Google Scholar] [CrossRef] [Green Version]
- Cui, G.; Zhu, J. Infiltration Model Based on Traveling Characteristics of Wetting Front. Soil Sci. Soc. Am. J. 2018, 82, 45–55. [Google Scholar] [CrossRef]
- Singh, D.K.; Rajput, T.; Singh, D.K.; Sikarwar, H.S.; Sahoo, R.N.; Ahmad, T. Simulation of Soil Wetting Pattern with Subsurface Drip Irrigation from Line Source. Agric. Water Manag. 2006, 83, 130–134. [Google Scholar] [CrossRef]
- Wang, J.; Zhang, C.; Liao, X.; Teng, Y.; Zhai, Y.; Yue, W. Influence of Surface-Water Irrigation on the Distribution of Organophosphorus Pesticides in Soil-Water Systems, Jianghan Plain, Central China. J. Environ. Manag. 2021, 281, 111874. [Google Scholar] [CrossRef]
- Walker, J.P.; Willgoose, G.R.; Kalma, J.D. One-Dimensional Soil Moisture Profile Retrieval by Assimilation of near-Surface Measurements: A Simplified Soil Moisture Model and Field Application. J. Hydrometeorol. 2009, 2, 356. [Google Scholar] [CrossRef]
- Monjezi, M.S.; Ebrahimian, H.; Liaghat, A.; Moradi, M.A. Soil-Wetting Front in Surface and Subsurface Drip Irrigation. Pap. Present. Proc. Inst. Civ. Eng. Water Manag. 2013, 166, 272–284. [Google Scholar] [CrossRef]
- Moncef, H.; Hedi, D.; Jelloul, B.; Mohamed, M. Approach for Predicting the Wetting Front Depth beneath a Surface Point Source: Theory and Numerical Aspect. Irrig. Drain. 2002, 51, 347–360. [Google Scholar] [CrossRef]
- Topp, G.C.; Davis, J.L.; Annan, A.P. Electromagnetic Determination of Soil Water Content Using Tdr: I. Applications to Wetting Fronts and Steep Gradients. Soil Sci. Soc. Am. J. 1982, 46, 672–678. [Google Scholar] [CrossRef]
- Lin, C.P. Analysis of Nonuniform and Dispersive Time Domain Reflectometry Measurement Systems with Application to the Dielectric Spectroscopy of Soils. Water Resour. Res. 2003, 39, 309–310. [Google Scholar] [CrossRef]
- Rabiner, L.R.; Schafer, R.W.; Rader, C.M. The chirp z-transform algorithm. IEEE Trans. Audio Electroacoust. 1969, 17, 86–92. [Google Scholar] [CrossRef]
- Frickey, D.A. Using the Inverse Chirp-Z Transform for Time-Domain Analysis of Simulated Radar Signals. Available online: https://www.osti.gov/servlets/purl/10110067 (accessed on 26 October 2021).
- Lewitt, R.M. Multidimensional Digital Image Representations Using Generalized Kaiser–Bessel Window Functions. J. Opt. Soc. Am. A Opt. Image Sci. Vis. 1990, 7, 1834–1846. [Google Scholar] [CrossRef]
- Zhao, W.; Qin, H.; Li, Q. A Calibration Procedure for Two-Port Vna with Three Measurement Channels Based on T-Matrix. Prog. Electromagn. Res. Lett. 2012, 29, 35–42. [Google Scholar] [CrossRef] [Green Version]
- Roth, C.H.; Malicki, M.A.; Plagge, R. Empirical evaluation of the relationship between soil dielectric constant and volumetric water content as the basis for calibrating soil moisture measurements by TDR. J. Soil Sci. 1992, 43, 1–13. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Soil Type | Cosmid (%) (<0.002 mm) | Powder (%) (0.002~0.02 mm) | Sand Grain (%) (0.02~2 mm) | Bulk Density (g/cm3) |
|---|---|---|---|---|
| Shaanxi Lou soil | 35.23 | 46.12 | 18.65 | 1.26 |
| Clay loam | 23.02 | 27.38 | 50.60 | 1.37 |
| Loess | 19.44 | 22.32 | 58.24 | 1.50 |
| Black soil | 14.45 | 31.12 | 54.43 | 1.36 |
| Depth | 0 cm | 4 cm | 8 cm | 12 cm | 16 cm | 20 cm | ||
|---|---|---|---|---|---|---|---|---|
| Soil Type | ||||||||
| Shaanxi Lou soil | Starting point | 5 | 5 | 5 | 5 | 5 | 5 | |
| Intermediate reflection point | 25 | 41 | 60 | 80 | ||||
| End point | 67 | 74 | 78 | 83 | 90 | 97 | ||
| Clay loam | Starting point | 5 | 5 | 5 | 5 | 5 | 5 | |
| Intermediate reflection point | 26 | 44 | 63 | 82 | ||||
| End point | 69 | 74 | 80 | 86 | 92 | 96 | ||
| Loess | Starting point | 5 | 5 | 5 | 5 | 5 | 5 | |
| Intermediate reflection point | 26 | 43 | 65 | 82 | ||||
| End point | 69 | 75 | 80 | 89 | 95 | 98 | ||
| Black soil | Starting point | 5 | 5 | 5 | 5 | 5 | 5 | |
| Intermediate reflection point | 27 | 46 | 64 | 79 | ||||
| End point | 69 | 76 | 82 | 86 | 89 | 95 | ||
| Soil Type | Equations of Model | R2 | RMSE |
|---|---|---|---|
| Shaanxi Lou soil | y = 0.9856x + 0.9668 | 0.991 | 0.678 |
| Clay loam | y = 0.9795x + 1.2151 | 0.9855 | 0.798 |
| Loess | y = 0.9835x + 1.2068 | 0.986 | 0.653 |
| Black soil | y = 0.9756x + 1.3365 | 0.9818 | 0.410 |
| Concatenated fitting | y = 0.98x + 1.3345 | 0.9861 | 0.621 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, X.; Liu, Z.; Lin, L.; Fan, H.; Liang, X.; Xu, J. A Novel Method for the Accurate Measurement of Soil Infiltration Line by Portable Vector Network Analyzer. Sensors 2021, 21, 7201. https://doi.org/10.3390/s21217201
Li X, Liu Z, Lin L, Fan H, Liang X, Xu J. A Novel Method for the Accurate Measurement of Soil Infiltration Line by Portable Vector Network Analyzer. Sensors. 2021; 21(21):7201. https://doi.org/10.3390/s21217201
Chicago/Turabian StyleLi, Xiaobin, Zhengguang Liu, Lei Lin, Hao Fan, Xingyu Liang, and Jinghui Xu. 2021. "A Novel Method for the Accurate Measurement of Soil Infiltration Line by Portable Vector Network Analyzer" Sensors 21, no. 21: 7201. https://doi.org/10.3390/s21217201
APA StyleLi, X., Liu, Z., Lin, L., Fan, H., Liang, X., & Xu, J. (2021). A Novel Method for the Accurate Measurement of Soil Infiltration Line by Portable Vector Network Analyzer. Sensors, 21(21), 7201. https://doi.org/10.3390/s21217201