
Driver’s Personality and Behavior for Boosting Automobile Security and Sensing Health Problems Through Fuzzy Signal Detection Case Study: Mexico City

 ,
,  ,
, 

Abstract
:1. Introduction
2. Background
2.1. Collision Avoidance Systems
2.2. Driver’s Personality Analysis
2.3. Signal Detection Theory
3. Personality Analysis Proposal
4. Drivers Personality and Behavior Associated with Health Problems
5. Project Results
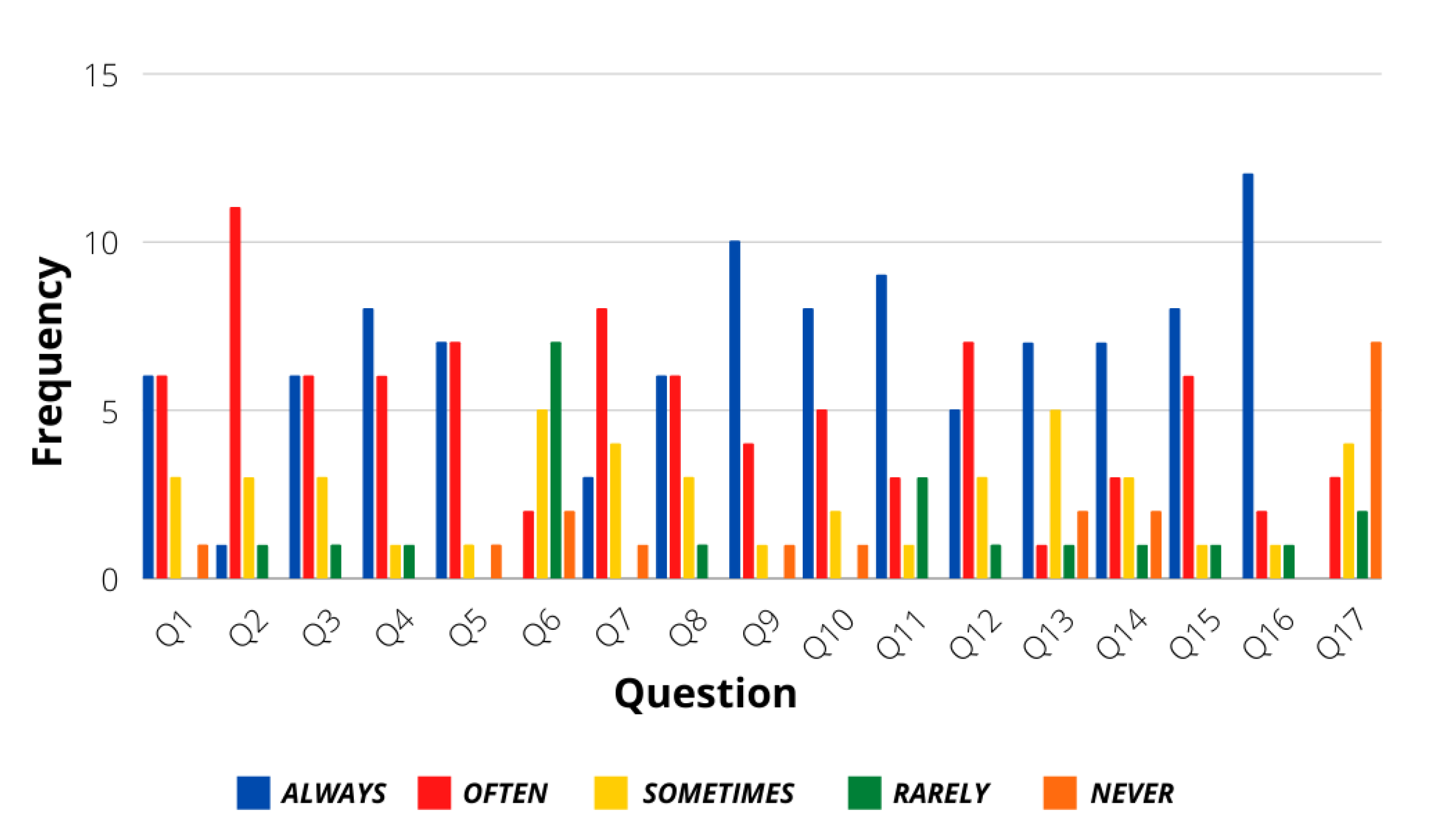
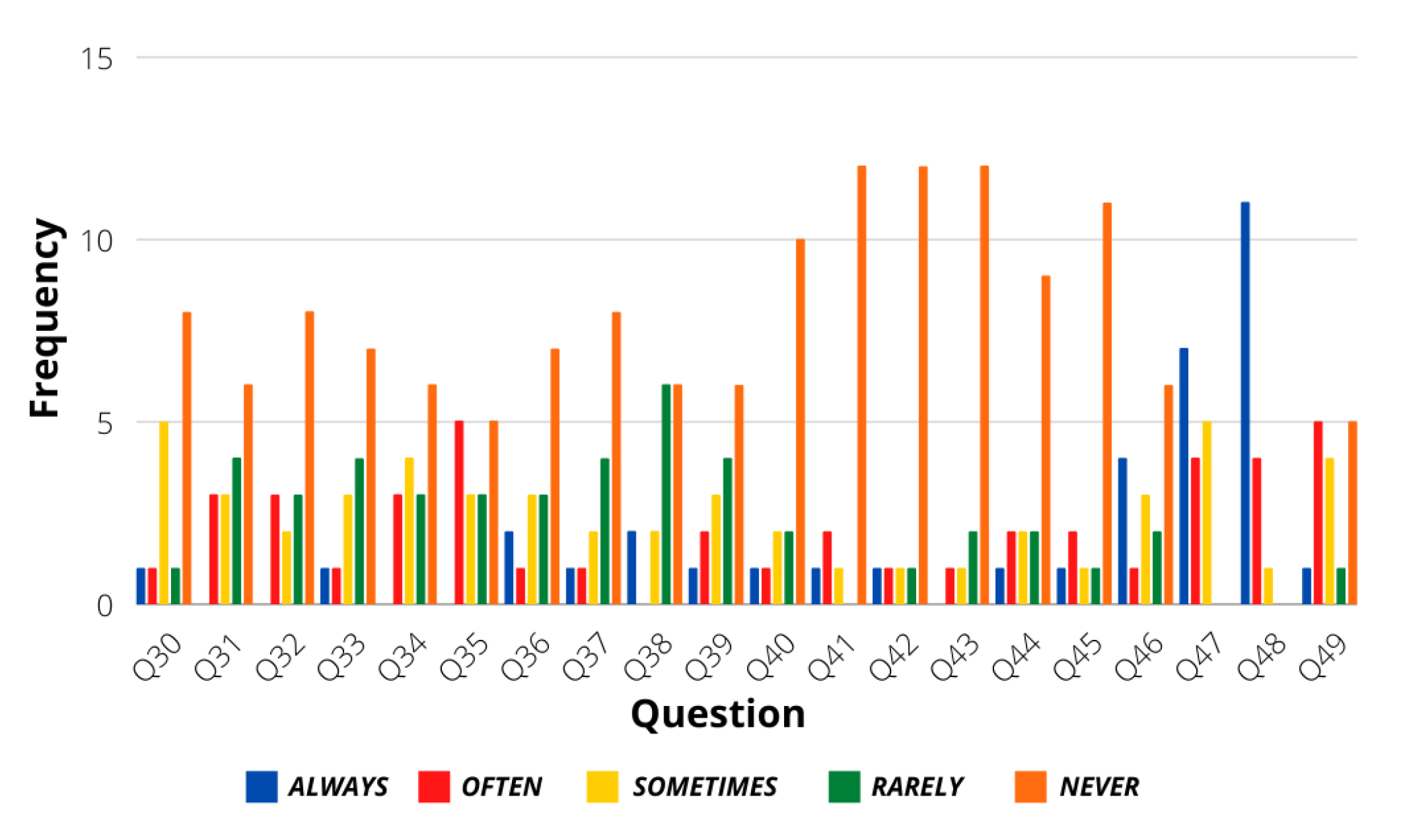
5.1. Survey Results
5.2. SDT Results
5.3. Driving Personality Test Results
6. Discussion
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Del-Colle, A. This Cadillac Concept Had Radar Crash-Avoidance in 1959. Available online: https://www.roadandtrack.com/car-culture/news/a27132/the-first-radar-based-crash-avoidance-system-was-in-a-1959-concept-car/ (accessed on 3 July 2021).
- Olney, R.D.; Manorotkul, S. Driver Adaptive Collision Warning System. U.S. Patent 7,302,344, 27 November 2007. [Google Scholar]
- Global NCAP. Crash Avoidance Features Reduce Crashes, Insurance Claim Study Shows. Available online: http://www.globalncap.org/crash-avoidance-features-reduce-crashes-insurance-claim-study-shows/ (accessed on 3 July 2021).
- Kiefer, R.; Cassar, M.; Flannagan, C. Forward Collision Warning Requirements Project Final Report-Task 1, DOT HS 809 574; Technical Report; National Highway Traffic Safety Administration: Washington, DC, USA, 2003. [Google Scholar]
- Ortiz-Peregrina, S.; Ortiz, C.; Anera, R.G. Aggressive driving behaviours in cannabis users. the influence of consumer characteristics. Int. J. Environ. Res. Public Health 2021, 18, 3911. [Google Scholar] [CrossRef]
- Van Voorhees, E.E.; Moore, D.A.; Kimbrel, N.A.; Dedert, E.A.; Dillon, K.H.; Elbogen, E.B.; Calhoun, P.S. Association of post-traumatic stress disorder and traumatic brain injury with aggressive driving in Iraq and Afghanistan combat veterans. Rehabil. Psychol. 2018, 63, 160. [Google Scholar] [CrossRef]
- Lashkov, I.; Kashevnik, A. A Multimodal Approach to Psycho-Emotional State Detection of a Vehicle Driver. In Proceedings of SAI Intelligent Systems Conference; Springer: Berlin/Heidelberg, Germany, 2021; pp. 574–585. [Google Scholar]
- De Seguridad, C.N. Accidentes y sus Factores. 2015. Available online: shorturl.at/dguyG (accessed on 3 July 2021).
- Safercar. Automatic Emergency Braking. Available online: https://www.safercar.gov/Vehicle+Shoppers/Safety+Technology/aeb-1/ (accessed on 3 July 2021).
- Council, E.T.S. New Study Confirms Real-World Safety Benefits of Autonomous Emergency Brakings. Available online: https://etsc.eu/new-study-confirms-real-world-safety-benefits-of-autonomous-emergency-braking/ (accessed on 11 July 2015).
- Nations, U. Uniform Provisions Concerning the Approval of Motor Vehicles with Regard to the Advanced Emergency Braking Systems (AEBS); United Nations, European Union: Brussels, Belgium, 2012. [Google Scholar]
- Kanarachos, S.A. A new method for computing optimal obstacle avoidance steering manoeuvres of vehicles. Int. J. Veh. Auton. Syst. 2009, 7, 73–95. [Google Scholar] [CrossRef]
- Zahid, M.; Chen, Y.; Khan, S.; Jamal, A.; Ijaz, M.; Ahmed, T. Predicting risky and aggressive driving behavior among taxi drivers: Do spatio-temporal attributes matter? Int. J. Environ. Res. Public Health 2020, 17, 3937. [Google Scholar] [CrossRef]
- Yang, J.; Du, F.; Qu, W.; Gong, Z.; Sun, X. Effects of personality on risky driving behavior and accident involvement for Chinese drivers. Traffic Inj. Prev. 2013, 14, 565–571. [Google Scholar] [CrossRef]
- Martí-Belda Bertolín, A.; Pastor Soriano, J.C.; Montoro González, L.; Bosó Seguí, P.; Roca, J. Persistent traffic offenders. Alcohol consumption and personality as predictors of driving disqualification. Eur. J. Psychol. Appl. Leg. Context 2019, 11, 81–92. [Google Scholar] [CrossRef] [Green Version]
- Honda. Honda Introduces New Crash Compatibility Body Frame Structure That Both Enhances Self Protection and Reduces Aggressivity. Available online: https://global.honda/newsroom/ (accessed on 3 July 2021).
- Šucha, M.; Černochová, D. Driver personality as a valid predictor of risky driving. Transp. Res. Procedia 2016, 14, 4286–4295. [Google Scholar] [CrossRef] [Green Version]
- Zicat, E.; Bennett, J.M.; Chekaluk, E.; Batchelor, J. Cognitive function and young drivers: The relationship between driving, attitudes, personality and cognition. Transp. Res. Part F Traffic Psychol. Behav. 2018, 55, 341–352. [Google Scholar] [CrossRef]
- Ehsani, J.P.; Li, K.; Simons-Morton, B.G.; Tree-McGrath, C.F.; Perlus, J.G.; O’Brien, F.; Klauer, S.G. Conscientious personality and young drivers’ crash risk. J. Saf. Res. 2015, 54, 83–e29. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Jonsson, M.; Dahlbäck, N. In-car information systems: Matching and mismatching personality of driver with personality of car voice. In International Conference on Human-Computer Interaction; Springer: Berlin/Heidelberg, Germany, 2013; pp. 586–595. [Google Scholar]
- Parasuraman, R.; Masalonis, A.J.; Hancock, P.A. Fuzzy signal detection theory: Basic postulates and formulas for analyzing human and machine performance. Hum. Factors 2000, 42, 636–659. [Google Scholar] [CrossRef]
- Abdi, H. Signal detection theory (SDT). In Encyclopedia of Measurement and Statistics; Sage: Beijing, China, 2007; pp. 886–889. [Google Scholar]
- Rader, A.E.; Young, M.E.; Leaf, J.B. A quantitative analysis of accuracy, reliability and bias in judgements of functional analyses. J. Exp. Anal. Behav. 2021, 116, 166–181. [Google Scholar] [CrossRef] [PubMed]
- DeCarlo, L.T. A Signal Detection Model for Multiple-Choice Exams. Appl. Psychol. Meas. 2021, 45, 01466216211014599. [Google Scholar] [CrossRef] [PubMed]
- Gruda, D.; Kafetsios, K. I Need a Doctor, Call Me a Doctor: Attachment and the Evaluation of General Practitioners before and during the COVID-19 Pandemic. Int. J. Environ. Res. Public Health 2021, 18, 7914. [Google Scholar] [CrossRef]
- Today, P. Driving Personality Test. Available online: https://www.psychologytoday.com/us/tests/personality/driving-personality-test (accessed on 3 July 2021).
- Harro, J.; Laas, K.; Eensoo, D.; Kurrikoff, T.; Sakala, K.; Vaht, M.; Parik, J.; Mäestu, J.; Veidebaum, T. Orexin/hypocretin receptor gene (HCRTR1) variation is associated with aggressive behaviour. Neuropharmacology 2019, 156, 107527. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Scott-Parker, B.; Jones, C.; Rune, K.; Tucker, J. A qualitative exploration of driving stress and driving discourtesy. Accid. Anal. Prev. 2018, 118, 38–53. [Google Scholar] [CrossRef]
- Hasaninasab, S.; Jalili, S.; Mirani, K. Evaluation Effects of Personality on the Young people Traffic Offense and Accident. Iran. J. Sci. Technol. Trans. Civ. Eng. 2021, 45, 491–503. [Google Scholar] [CrossRef]
- Qi, W.; Hu, H.; Guo, T.; Cao, S.; Chen, C. Characteristics Analysis on Eye Moving and Lane Changing of Taxi Drivers in the Congestion State. In CICTP 2017: Transportation Reform and Change—Equity, Inclusiveness, Sharing, and Innovation; American Society of Civil Engineers Reston: Reston, VA, USA, 2018; pp. 4660–4666. [Google Scholar]
- Zinzow, H.M.; Jeffirs, S.M. Driving aggression and anxiety: Intersections, assessment, and interventions. J. Clin. Psychol. 2018, 74, 43–82. [Google Scholar] [CrossRef]
- Vanstone, M.; Rewegan, A.; Brundisini, F.; Dejean, D.; Giacomini, M. Patient perspectives on quality of life with uncontrolled type 1 diabetes mellitus: A systematic review and qualitative meta-synthesis. Ont. Health Technol. Assess. Ser. 2015, 15, 1. [Google Scholar]
- van den Berg, T.G.; Kroesen, M.; Chorus, C.G. Does morality predict aggressive driving? A conceptual analysis and exploratory empirical investigation. Transp. Res. Part Traffic Psychol. Behav. 2020, 74, 259–271. [Google Scholar] [CrossRef]
- Islam, M.; Mannering, F. A temporal analysis of driver-injury severities in crashes involving aggressive and non-aggressive driving. Anal. Methods Accid. Res. 2020, 27, 100128. [Google Scholar] [CrossRef]
- Dahlen, E.R.; Edwards, B.D.; Tubré, T.; Zyphur, M.J.; Warren, C.R. Taking a look behind the wheel: An investigation into the personality predictors of aggressive driving. Accid. Anal. Prev. 2012, 45, 1–9. [Google Scholar] [CrossRef] [PubMed]
- Dadhich, T.; Gupta, S. Detecting Aggressive Driving Behavior Using Spectral Kurtosis and MEMS Accelerometers. In Proceedings of the Second International Conference on Information Management and Machine Intelligence; Springer: Berlin/Heidelberg, Germany, 2021; pp. 9–20. [Google Scholar]
- Günthner, T.; Proff, H. On the way to autonomous driving: How age influences the acceptance of driver assistance systems. Transp. Res. Part F Traffic Psychol. Behav. 2021, 81, 586–607. [Google Scholar] [CrossRef]
- Ponce, P.; Polasko, K.; Molina, A. Technology transfer motivation analysis based on fuzzy type 2 signal detection theory. AI Soc. 2016, 31, 245–257. [Google Scholar] [CrossRef]
- Bělohlávek, R.; Klir, G.J. Concepts and Fuzzy Logic; MIT Press: Cambridge, MA, USA, 2011. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 1 | When drivers indicate they want to pass ahead of me into my lane, I let them through |
| 2 | I drive at or below the speed limit. |
| 3 | When a driver allows me to pass ahead of him/her, I signal my thanks (smile, wave my hand, etc.) |
| 4 | I reduce my speed when I am in a school zone. |
| 5 | On rainy/slushy days, I slow down when driving near sidewalks to avoid splashing pedestrians. |
| 6 | I talk on the phone while driving. |
| 7 | I give other drivers the right-of-way. |
| 8 | If I know I have had too much to drink, I find an alternative mode of transportation to get home. |
| 9 | I use my signal flashers to let drivers behind me know when I am turning or changing lanes. |
| 10 | Even if it is late at night and no other cars are on the road, I still stop at traffic lights or signs. |
| 11 | If I am driving slower than other drivers, I refrain from using the left lane. |
| 12 | If my passenger(s) try to pressure me to drive faster, I ignore them. |
| 13 | Even when weather conditions at night are clear, I still drive with my high beams on. |
| 14 | When driving, I insist that all my passengers put their seatbelts on. |
| 15 | When waiting to turn from a one-way street, I leave enough space (if possible) so that drivers behind me that are going straight can pass. |
| 16 | I check my blind spot before changing lanes. |
| 17 | My driving attitude and style change depending on whether a police officer is nearby. |
| 18 | At an intersection with a four-way stop, the vehicle that arrives first should go first. |
| 19 | Even if a road is divided by a cement median, cars on the opposite side must still stop when the signal lights of a school bus are flashing. |
| 20 | Reversing on expressway entrances or exits is allowed. |
| 21 | The faster you drive, the more braking distance you will require to come to a full stop. |
| 22 | When passing (from the left lane), you are not permitted to pass more than one vehicle at a time. |
| 23 | If two or more vehicles arrive at a four-way stop simultaneously, the one on the right should yield to the one on the left. |
| 24 | Drivers must stop a minimum of 5 m from a school bus (with its signal lights flashing). |
| 25 | When more than one lane is designated for turning, the safest turning method would be to use the left lane. |
| 26 | If the beams blind you from an oncoming car’s headlights, you should direct your eyes: |
| 27 | Hydroplaning occurs when: |
| 28 | As your driving speed increases, your field of vision: |
| 29 | In which of the following conditions is the road the MOST slippery? |
| 30 | Purposely cutting someone off. |
| 31 | Swearing or “flipping the bird.” |
| 32 | Tailgating. |
| 33 | Honking to make someone drive faster. |
| 34 | Zigzagging through traffic. |
| 35 | Exceeding the speed limit by 20 mph (30km/h) on city streets. |
| 36 | Verbalizing or wishing physical harm to other drivers. |
| 37 | Braking suddenly to scare a tailgater. |
| 38 | Excessively honking. |
| 39 | Flashing your lights in frustration. |
| 40 | Trying to run someone off the road. |
| 41 | Purposely hitting another driver (with your car or an object) |
| 42 | Purposely cutting a driver off to splash water in their car. |
| 43 | Stopping your car in anger or insisting that a driver pull over to confront him/her (i.e., because she/he cut you off, stole your parking space, etc.) |
| 44 | Rolling your window down to yell at another driver. |
| 45 | Chasing another car. |
| 46 | It is OK to drive a little recklessly as long as no one is around to get hurt. |
| 47 | I think punishment for speeding should be license removal. |
| 48 | I wear my seatbelt. |
| 49 | I believe there is nothing wrong with breaking a few traffic regulations as long as you have good reflexes (are an alert driver). |
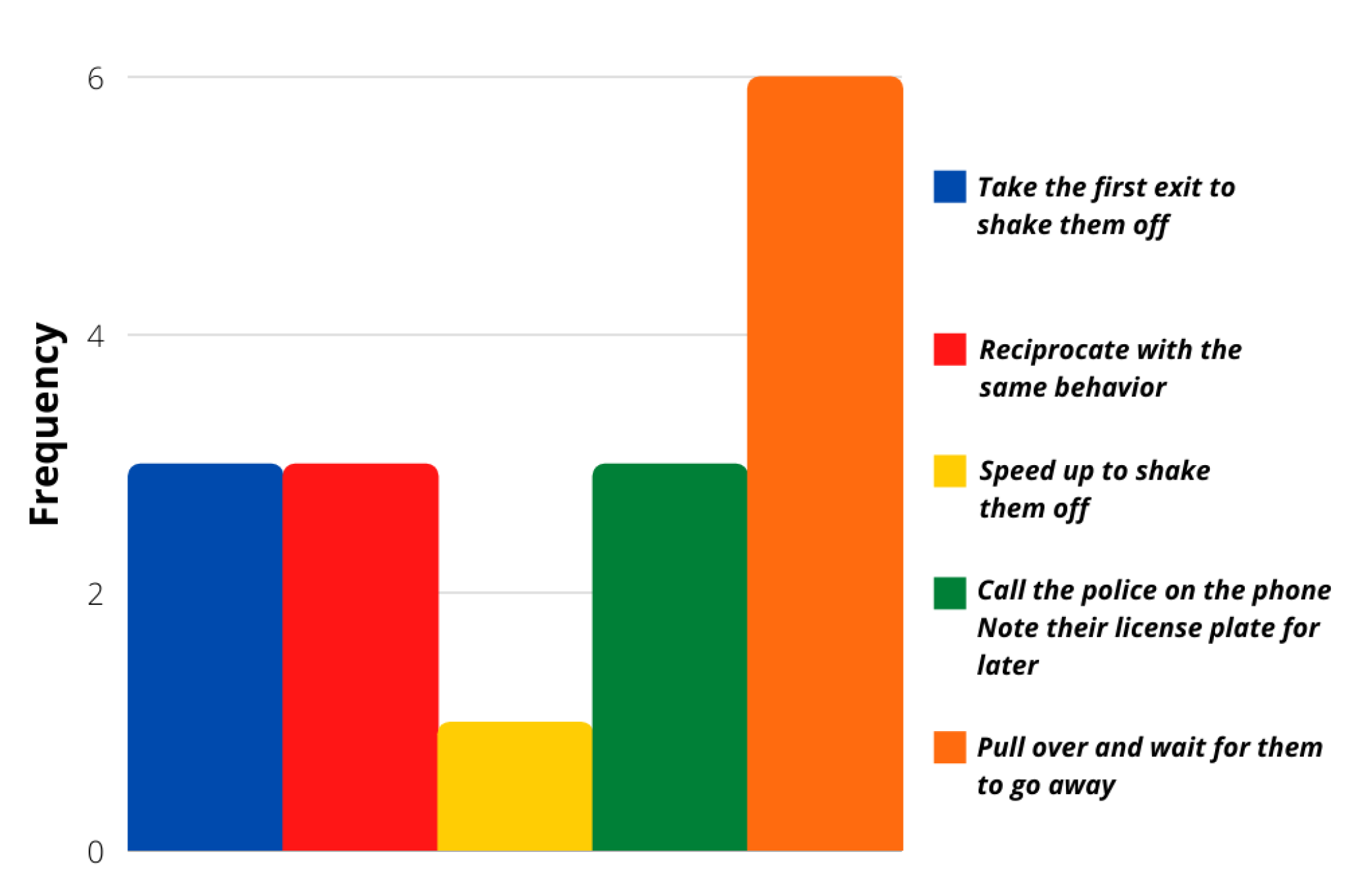
| 50 | You are driving along peacefully when a car full of teenagers zooms up behind you. After tailgating you for a few moments, they then proceed to pass you, pull up in front of you, and drastically decrease their speed. All along, they are taunting, laughing, and pointing. What do you do? |
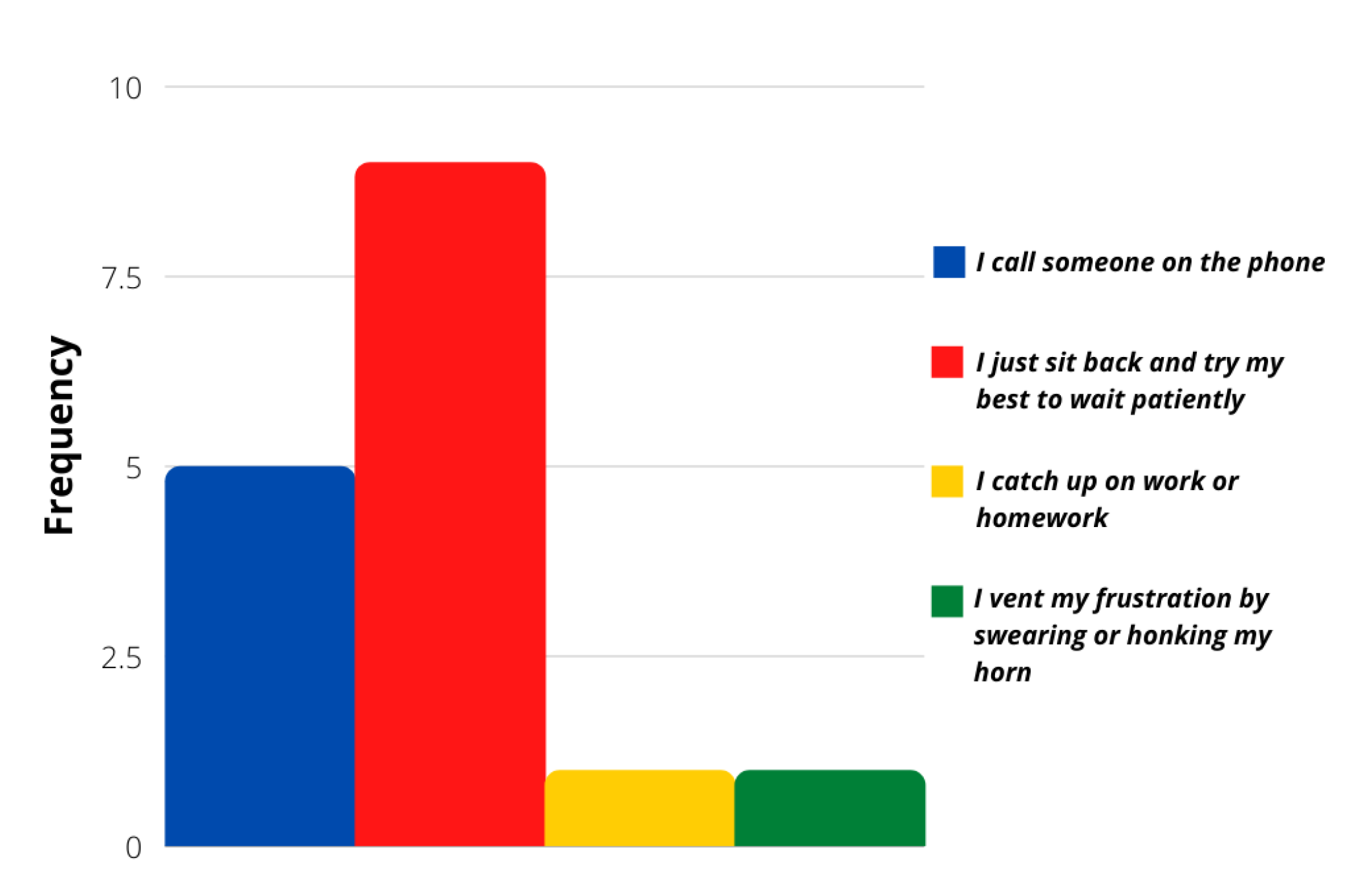
| 51 | You are stuck in a traffic jam on a hot summer day. What do you usually do in this situation? |
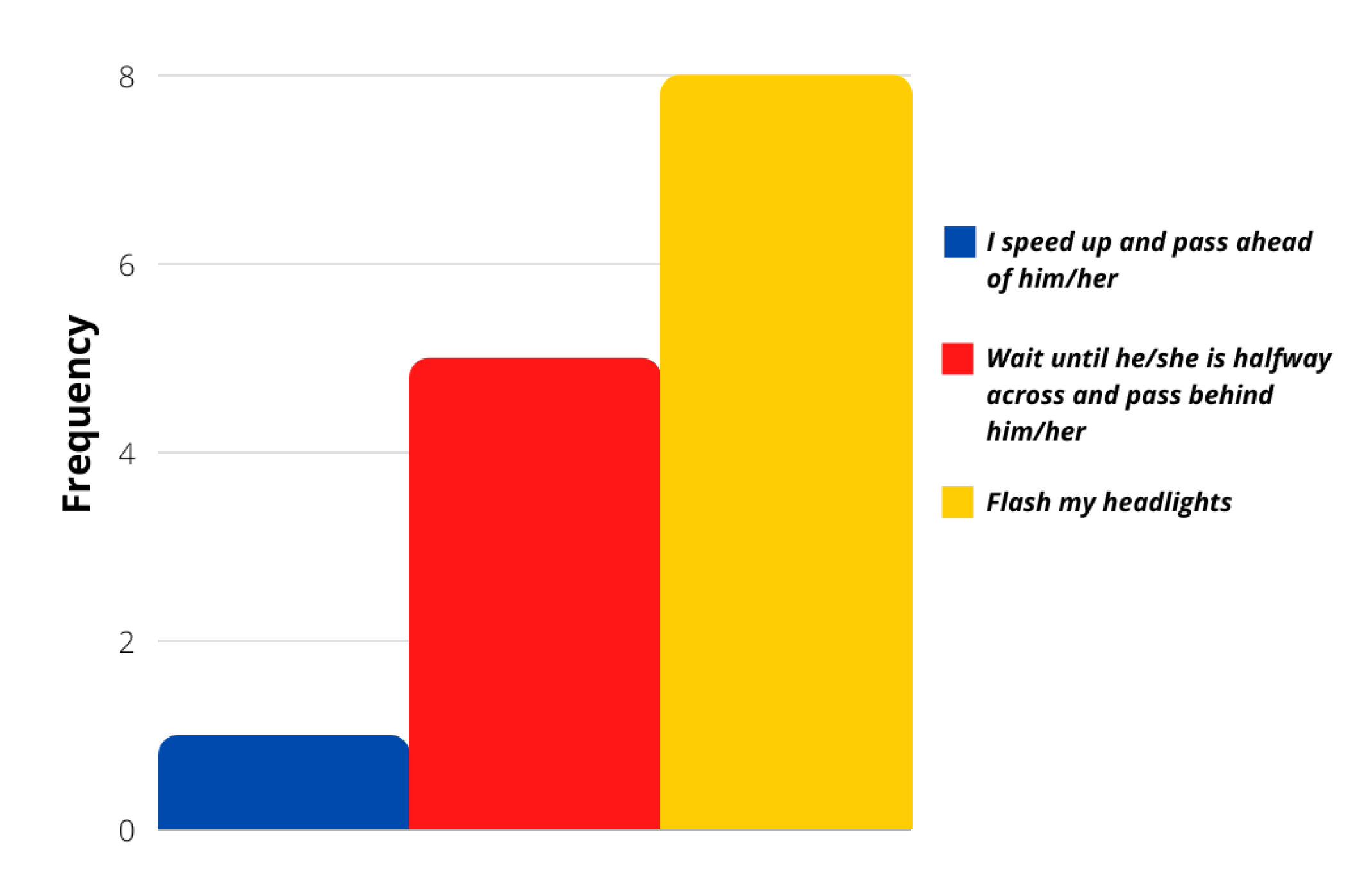
| 52 | A slow pedestrian is crossing the street you want to turn on. What do you do? |
| 53 | You are driving down a road at night when you notice that an oncoming driver does not have his/her headlights on. What do you do? |
| 54 | You are driving at the speed limit on a low-traffic country road when a car passes you illegally. Which of the following would you most likely do? |
| 55 | You are driving down a narrow street late at night when you accidentally bump into a parked car. The dent is minor but still somewhat noticeable. What is your first instinct? |
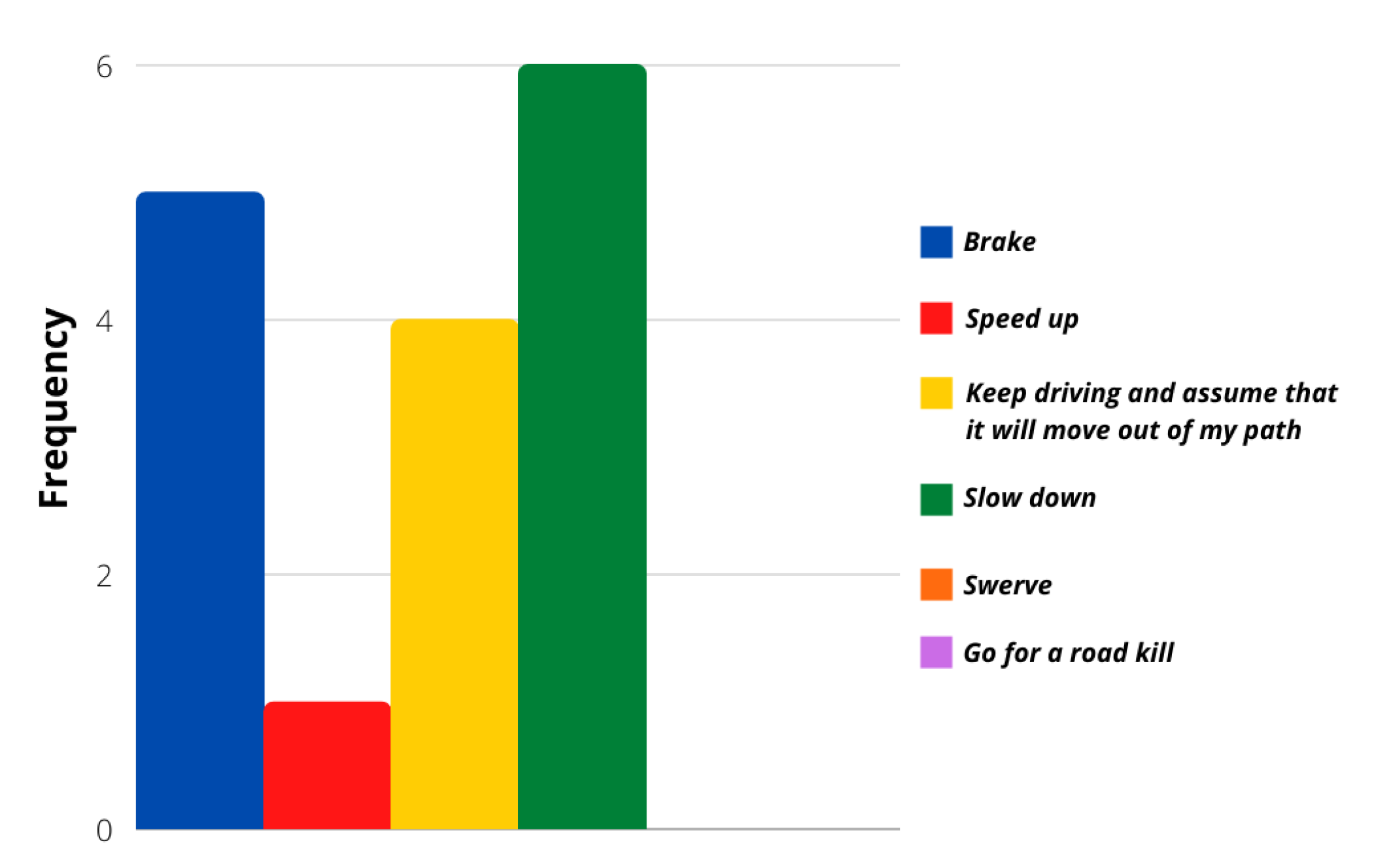
| 56 | You have had a bad day. You were chastised by your boss in front of your colleagues, you had a rude waitress during lunch, and you got splashed on the way to your car. As you are driving through a quiet neighborhood, you see a little squirrel crossing the street about 30 feet (10 m) ahead of you. What is your first instinct? |
| 57 | You are at the mall for some last-minute Christmas shopping. Available parking space is sparse buy you manage to spot a car pulling out. You steer towards and wait for the car to leave, but just as you are about to pull in, another car drives up from the opposite side and takes it from you. Unfortunately, you are not sure whether he/she saw you waiting. What do you do? |
| 58 | You are on your way to the theater with your niece and nephew to see the latest Disney movie. An aggressive driver recklessly cuts you off as you are chitchatting, forcing you to slam on the brakes. How would you respond? |
| 59 | The light turns green, but the driver ahead of you has not noticed. What do you usually do in this situation? |
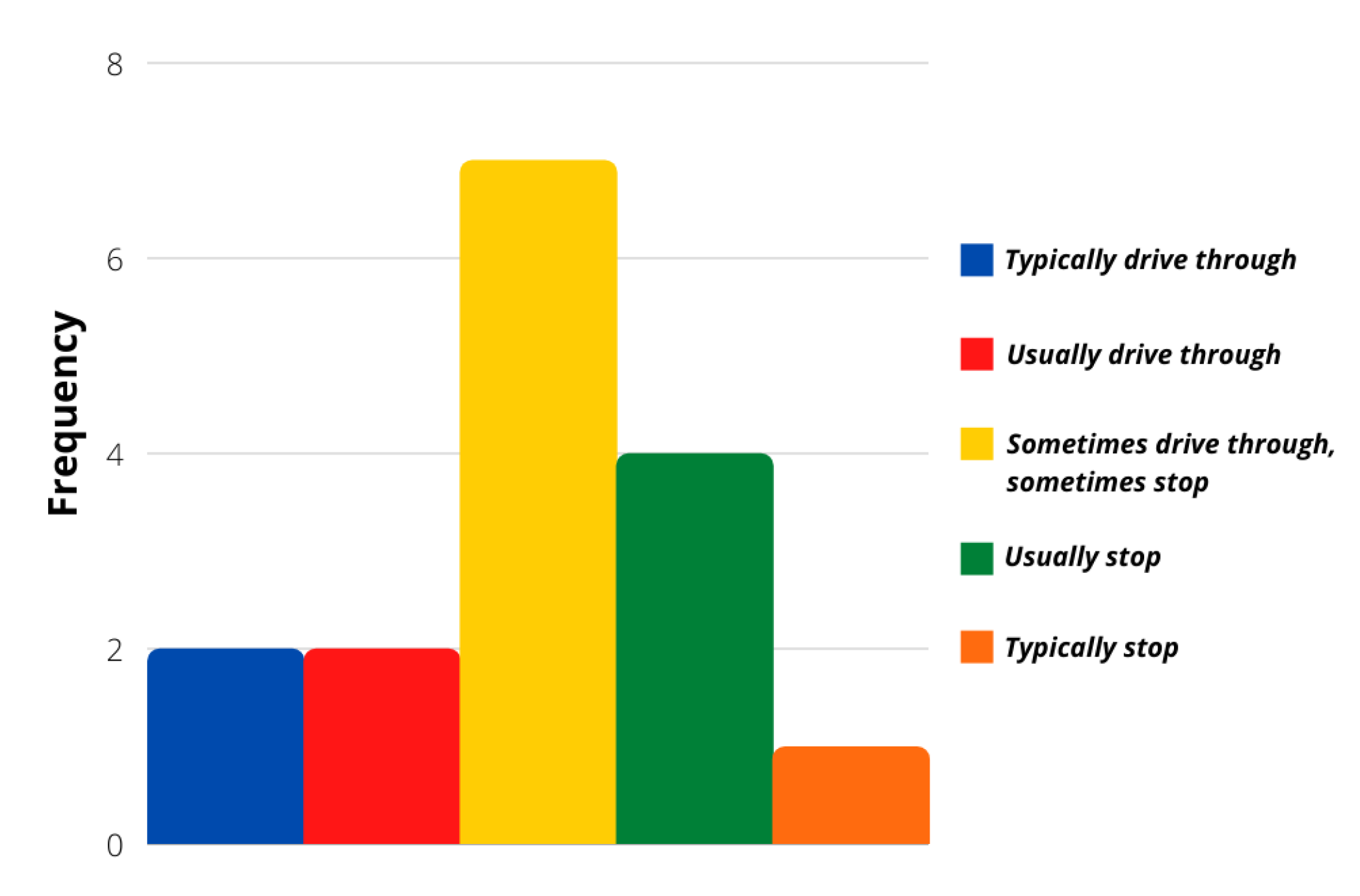
| 60 | You are approaching an intersection, and the light turns yellow. You can make it through if you accelerate, but you have enough time to stop. What do you do? |
| 26 | Straight ahead | Towards the right side of the pavement | Towards the tip of your hood | Towards the horizon | |||
| 27 | Your brakes get wet | You slide on black ice | You accelerate too quickly in snowy conditions | Your tires lose traction in deep water | |||
| 28 | Increases | Decreases | Remains the same, no matter what speed you are driving at | ||||
| 29 | Before it starts to rain | A few minutes after it starts raining | After it has finished raining | Once most of the water has evaporated | |||
| 50 | Take the first exit to shake them off | Reciprocate with the same behavior | Speed up to shake them off | Pull-over and wait for them to go away | Call the police on the cellphone/note their license plate for later | ||
| 51 | I call someone on the phone | I sit back and try my best to wait patiently | I catch up on work or homework | I vent my frustration by swearing or honking | I try to find a way to get through the traffic (e.g., drive on the shoulder of the road, or zigzag through the cars) | ||
| 52 | Speed up and pass ahead of him/her | Wait until he/she is halfway across and pass behind him/her | Wait until he/she is near the sidewalk and then turn | Wait until he/she steps entirely into the sidewalk before turning | |||
| 53 | Ignore him/her | Honk | Flash my headlights | ||||
| 54 | Honk and/or flash my lights | Reciprocate and/or get behind the car and start tailgating | Ignore it and keep driving | Give the driver a dirty look and keep driving | Try to drive the car off the road to teach the driver a lesson | ||
| 55 | Keep driving; the damage is not that bad | Stop to make sure the damage is not too bad, then drive away | Start ringing some doorbells to find the owner of the car | Leave a note on the windshield with your name and number | |||
| 56 | Brake | Speed up | Go for a roadkill | Slow down | Swerve | Keep driving and assume that it will move out of my path | |
| 57 | Look for another space | Get out of the car and peacefully confront the driver | Roll down my window and start screaming at the driver | Get out of the car and angrily confront the driver | Shake my head in anger and find another spot | ||
| 58 | I would ignore the incident and keep driving | I would shake my head in disapproval | I would mutter swear words under my breath | I would shout obscenities at the driver that would make a sailor blush | I would chase after the driver to tell him/her off | I would chase after the driver and coy him/her off in return | |
| 59 | I wait until he/she notices | I wait for other cars to honk | I wait a few seconds to see if he/she notices, then honk lightly | I honk immediately but lightly | I honk heavily until he/she moves | I honk heavily until he/she moves, then give him/her a dirty look | I try to pass around him/her making sure to give him/her a dirty look before speeding up |
| 60 | Typically drive-through | Usually, drive-through | Usually, stop | Typically stop | Sometimes drive through, sometimes stop | ||
| Subject | H | M | FA | CR | HR | FAR | ||
|---|---|---|---|---|---|---|---|---|
| Expert | 13 | 1 | 14 | 14 | 0.92857 | 0.50000 | 1.46523 | 0.34183 |
| 1 | 11 | 3 | 16 | 12 | 0.78571 | 0.57143 | 0.61163 | 0.74294 |
| 2 | 11 | 3 | 22 | 6 | 0.78571 | 0.78571 | 0.00000 | 1.00000 |
| 3 | 12 | 2 | 6 | 22 | 0.85714 | 0.21429 | 1.85921 | 0.77375 |
| 4 | 13.5 | 0.5 | 24 | 4 | 0.96429 | 0.85714 | 0.73517 | 0.34816 |
| 5 | 9 | 5 | 3 | 25 | 0.64286 | 0.10714 | 1.60797 | 2.02203 |
| 6 | 11 | 3 | 15 | 13 | 0.78571 | 0.53571 | 0.70200 | 0.73394 |
| 7 | 13.5 | 0.5 | 24 | 4 | 0.96429 | 0.85714 | 0.73517 | 0.34816 |
| 8 | 3 | 11 | 7 | 21 | 0.21429 | 0.25000 | 0.00000 | 0.91771 |
| 9 | 12 | 2 | 23 | 5 | 0.85714 | 0.82143 | 0.14675 | 0.86425 |
| 10 | 9 | 5 | 5 | 23 | 0.64286 | 0.17857 | 1.28693 | 1.42895 |
| 11 | 11 | 3 | 17 | 11 | 0.78571 | 0.60714 | 0.51976 | 0.75852 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Reyes, G.E.B.; Ponce, P.; Castellanos, S.; Hernández, J.A.G.; Cruz, U.S.; MacDaniel, T.; Molina, A. Driver’s Personality and Behavior for Boosting Automobile Security and Sensing Health Problems Through Fuzzy Signal Detection Case Study: Mexico City. Sensors 2021, 21, 7350. https://doi.org/10.3390/s21217350
Reyes GEB, Ponce P, Castellanos S, Hernández JAG, Cruz US, MacDaniel T, Molina A. Driver’s Personality and Behavior for Boosting Automobile Security and Sensing Health Problems Through Fuzzy Signal Detection Case Study: Mexico City. Sensors. 2021; 21(21):7350. https://doi.org/10.3390/s21217350
Chicago/Turabian StyleReyes, Germán E. Baltazar, Pedro Ponce, Sergio Castellanos, José Alberto Galván Hernández, Uriel Sierra Cruz, Troy MacDaniel, and Arturo Molina. 2021. "Driver’s Personality and Behavior for Boosting Automobile Security and Sensing Health Problems Through Fuzzy Signal Detection Case Study: Mexico City" Sensors 21, no. 21: 7350. https://doi.org/10.3390/s21217350
APA StyleReyes, G. E. B., Ponce, P., Castellanos, S., Hernández, J. A. G., Cruz, U. S., MacDaniel, T., & Molina, A. (2021). Driver’s Personality and Behavior for Boosting Automobile Security and Sensing Health Problems Through Fuzzy Signal Detection Case Study: Mexico City. Sensors, 21(21), 7350. https://doi.org/10.3390/s21217350