
Reconstruction of Velocity Curve in Long Stroke and High Dynamic Range Laser Interferometry


Abstract
:1. Introduction
2. System Theory Analysis
2.1. Optical Path Analysis and Design
2.2. Signal Processing
2.2.1. Traditional Modulus Maxima Frequency Extraction Algorithm
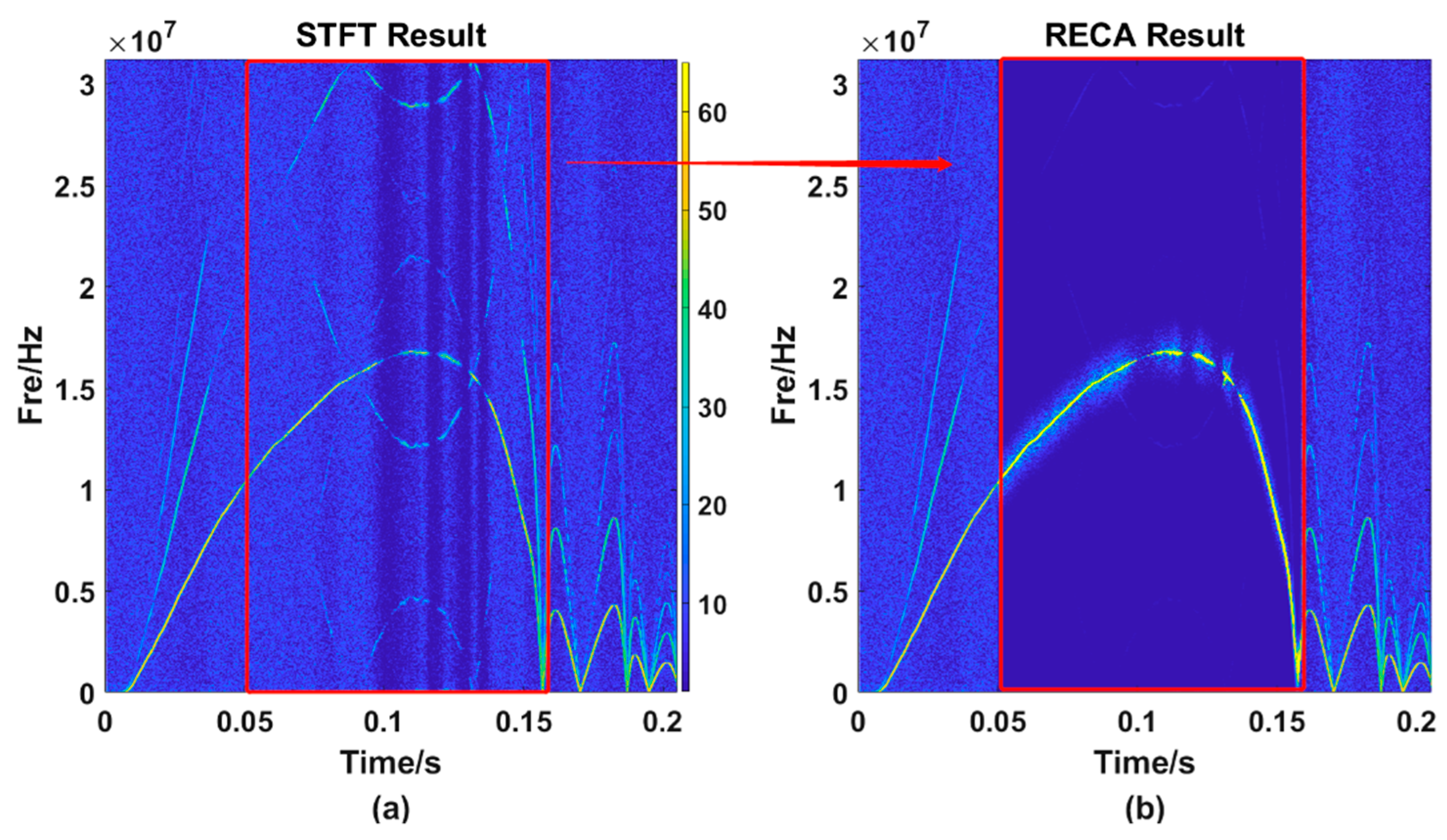
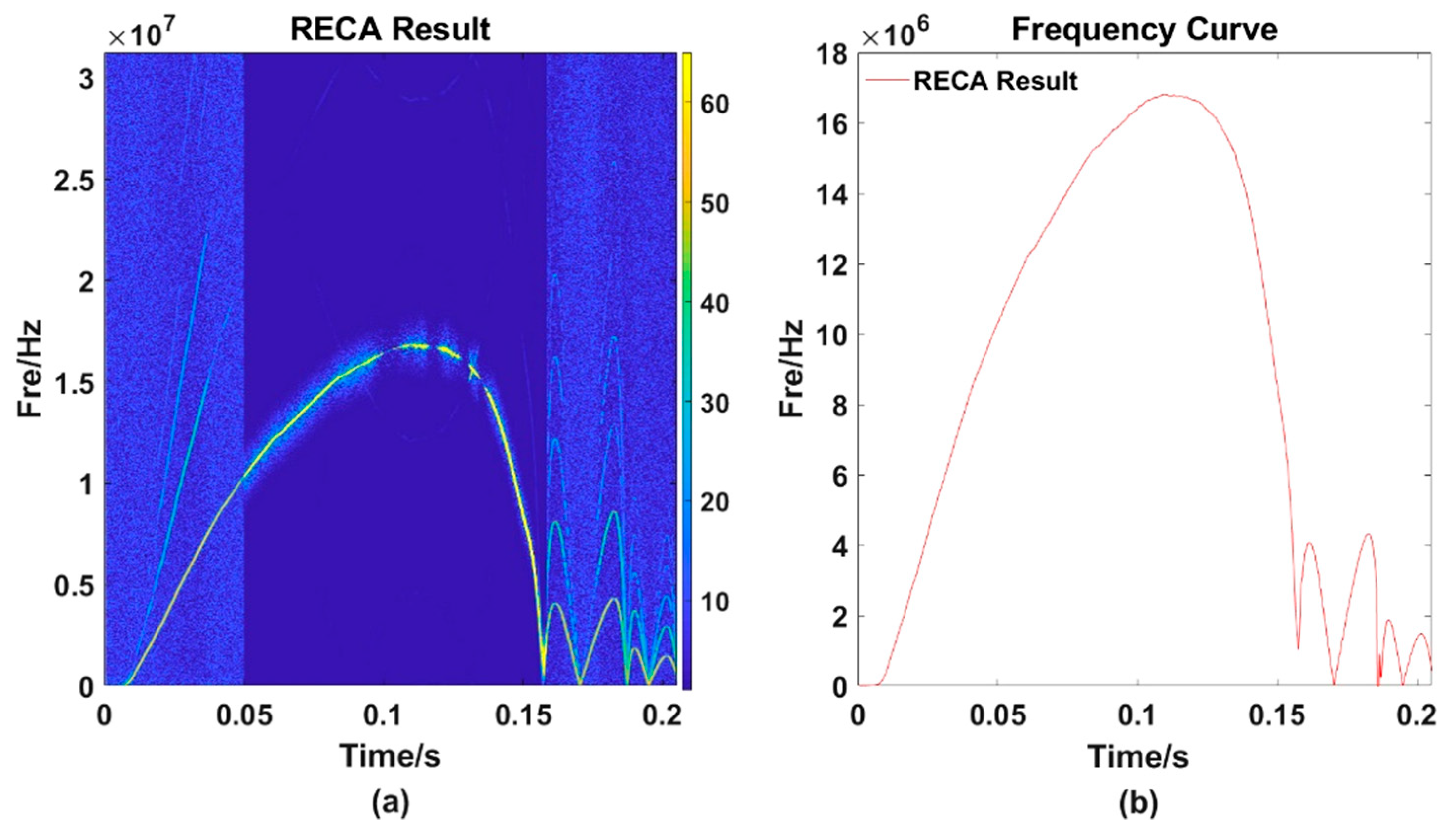
2.2.2. RECA Based on STFT
3. Experiment Construction and Result Analysis
3.1. Experimental Construction
3.2. Analysis of Experimental Results
3.2.1. Calibration Analysis of Single Point Frequency Data
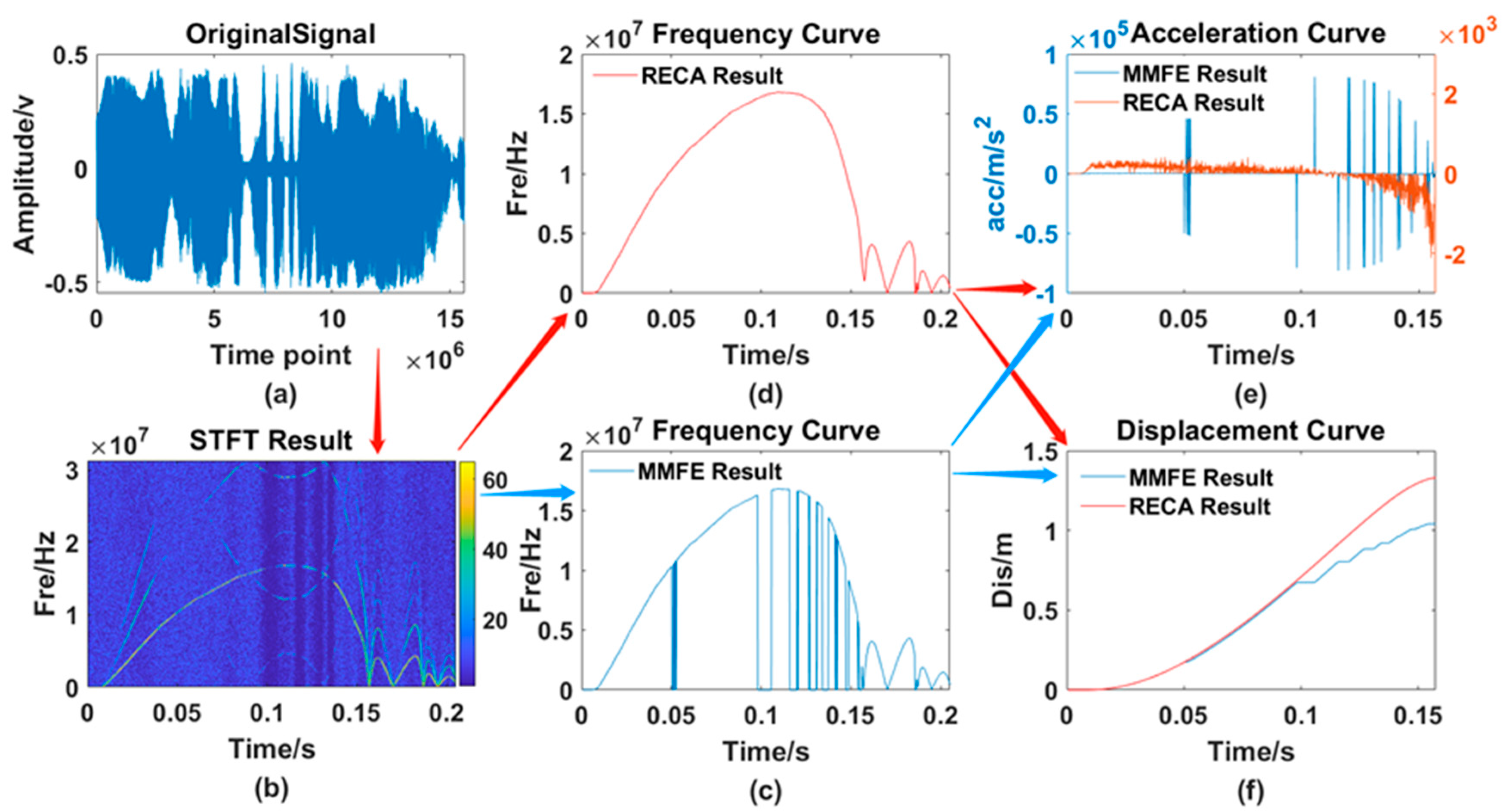
3.2.2. Detailed Analysis of a Single Experiment Results
3.2.3. Comparative Analysis of Multiple Experimental Results
4. Conclusions and Prospect
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wu, X.; Xia, W.; Wang, X.; Song, H.; Huang, C. Effect of surface reflectivity on photonic Doppler velocimetry measurement. Meas. Sci. Technol. 2014, 25, 055207. [Google Scholar] [CrossRef] [Green Version]
- Dolan, D.H. Extreme measurements with Photonic Doppler Velocimetry (PDV). Rev. Sci. Instrum. 2020, 91, 051501. [Google Scholar] [CrossRef]
- Tunnell, T.W. Feature Extraction of PDV Challenge Data Set A with Digital Down Shift (DDS). In Proceedings of the PDV Workshop, Sandia National Laboratories, Albuquerque, NM, USA, 22–23 October 2012. [Google Scholar]
- Barbarin, Y.; Le Blanc, G.; D’Almeida, T.; Hamrouni, M.; Roudot, M.; Luc, J. Multi-wavelength crosstalk-free photonic Doppler velocimetry. Rev. Sci. Instrum. 2020, 91, 123105. [Google Scholar] [CrossRef] [PubMed]
- Malone, R.M.; Cata, B.M.; Daykin, E.P.; Esquibel, D.L.; Frogget, B.C.; Holtkamp, D.B.; Kaufman, M.I.; McGillivray, K.D.; Palagi, M.J.; Pazuchanics, P.; et al. Photonic Doppler velocimetry probe designed with stereo imaging. Proc. Soc. Photo-Opt. Instrum. Eng. 2014, 9195, 919503. [Google Scholar] [CrossRef]
- Dolan, D.H. Accuracy and precision in photonic Doppler velocimetry. Rev. Sci. Instrum. 2010, 81, 053905. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Mance, J.G.; La Lone, B.M.; Dolan, D.H.; Payne, S.L.; Ramsey, D.L.; Veeser, L.R. Time-stretched photonic Doppler velocimetry. Opt. Express 2019, 27, 25022–25030. [Google Scholar] [CrossRef]
- Chu, P.; Kilic, V.; Foster, M.A.; Wang, Z. Time-lens photon Doppler velocimetry (TL-PDV). Rev. Sci. Instrum. 2021, 92, 044703. [Google Scholar] [CrossRef]
- Pavlenko, A.V.; Mokrushin, S.S.; Tyaktev, A.A.; Anikin, N.B. A hybrid interferometric system for velocity measurements in shock-wave experiments. Rev. Sci. Instrum. 2021, 92, 015104. [Google Scholar] [CrossRef]
- Mateo, C.; Talavera, J.A. Bridging the gap between the short-time Fourier transform (STFT), wavelets, the constant-Q transform and multi-resolution STFT. Signal Image Video Process. 2020, 14, 1535–1543. [Google Scholar] [CrossRef]
- Klejmova, E.; Pomenkova, J. Identification of a Time-Varying Curve in Spectrogram. Radioengineering 2017, 26, 291–298. [Google Scholar] [CrossRef]
- Leandro, D.; Zhu, M.; Lopez-Amo, M.; Murayama, H. Quasi-Distributed Vibration Sensing Based on Weak Reflectors and STFT Demodulation. J. Lightwave Technol. 2020, 38, 6954–6960. [Google Scholar] [CrossRef]
- Zhao, Q.; Qiu, W.; Zhang, B.; Wang, B. Quickest Spectrum Sensing Approaches for Wideband Cognitive Radio Based On STFT and CS. KSII Trans. Internet Inf. Syst. 2019, 13, 1199–1212. [Google Scholar] [CrossRef] [Green Version]
- Manhertz, G.; Bereczky, A. STFT spectrogram based hybrid evaluation method for rotating machine transient vibration analysis. Mech. Syst. Signal Process. 2021, 154, 107583. [Google Scholar] [CrossRef]
- Djurovie, I.; Popovic-Bugarin, V.; Simeunovic, M. The STFT-Based Estimator of Micro-Doppler Parameters. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 1273–1283. [Google Scholar] [CrossRef]
- Alaifari, R.; Wellershoff, M. Uniqueness of STFT phase retrieval for bandlimited functions. Appl. Comput. Harmon. Anal. 2020, 50, 34–48. [Google Scholar] [CrossRef]
- Tao, H.; Wang, P.; Chen, Y.; Stojanovic, V.; Yang, H. An unsupervised fault diagnosis method for rolling bearing using STFT and generative neural networks. J. Frankl. Inst. 2020, 357, 7286–7307. [Google Scholar] [CrossRef]
- Soubra, R.; Chkeir, A.; Mourad-Chehade, F.; Alshamaa, D. Doppler Radar System for In-Home Gait Characterization using Wavelet Transform Analysis. In Proceedings of the 2019 41st Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Berlin, Germany, 23–27 July 2019; pp. 6081–6084. [Google Scholar] [CrossRef]
- Choi, C.; Park, J.; Lee, H.; Yang, J. Heartbeat detection using a Doppler radar sensor based on the scaling function of wavelet transform. Microw. Opt. Technol. Lett. 2019, 61, 1792–1796. [Google Scholar] [CrossRef]
- Song, H.; Wu, X.; Huang, C.; Wei, Y.; Wang, X. Measurement of fast-changing low velocities by photonic Doppler velocimetry. Rev. Sci. Instrum. 2012, 83, 73301. [Google Scholar] [CrossRef] [PubMed]
- Dai, J.; Zhang, D.; Duan, X. Comparison of Signal Demodulation Methods for Photon Doppler Velocimetry System. Metrol. Meas. Technol. 2019, 39, 1–7. [Google Scholar]
- Yu, G.; Yu, M.; Xu, C. Synchroextracting Transform. IEEE Trans. Ind. Electron. 2017, 64, 8042–8054. [Google Scholar] [CrossRef]
- Lear, C.R.; Jones, D.R.; Prime, M.B.; Fensin, S.J. Saver: A Peak Velocity Extraction Program for Advanced Photonic Doppler Velocimetry Analysis. J. Dyn. Behav. Mater. 2021, 7, 510–517. [Google Scholar] [CrossRef]
- Wang, W.; Guo, G.; He, W.; Chen, Q. Extraction Method of Photon Doppler Velocimetry Signal Based on MeanShift Algorithm. Chin. J. Lasers 2014, 41, 217–225. [Google Scholar]
- Liu, S.; Wang, D.; Li, T.; Chen, G.; Li, Z.; Peng, Q. Analysis of photonic Doppler velocimetry data based on the continuous wavelet transform. Rev. Sci. Instrum. 2011, 82, 23103. [Google Scholar] [CrossRef] [PubMed]
- Gallegos, C.H.; Marshall, B.; Teel, M.; Romero, V.T.; Diaz, A.; Berninger, M. Comparison of Triature Doppler Velocimetry and Visar. J. Phys. Conf. Ser. 2010, 244, 032045. [Google Scholar] [CrossRef]
- Huang, J.; Chen, B.; Yao, B.; He, W. ECG Arrhythmia Classification Using STFT-Based Spectrogram and Convolutional Neural Network. IEEE Access 2019, 7, 92871–92880. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Serial Number | Measured Value | MMFEM easurements | Error Value (%) | ΔMMFE | RECA Measurements | Error Value (%) | ΔRECA | Error Reduction (%) |
|---|---|---|---|---|---|---|---|---|
| 1 | 1360 mm | 1212 mm | 10.88 | 248.46 | 1354 mm | 0.44 | 7.27 | 10.44 |
| 2 | 1360 mm | 1030 mm | 24.26 | 1353 mm | 0.51 | 23.75 | ||
| 3 | 1360 mm | 1132 mm | 16.76 | 1352 mm | 0.58 | 16.18 | ||
| 4 | 1360 mm | 1311 mm | 3.6 | 1357 mm | 0.22 | 3.38 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Feng, J.; Wu, J.; Si, Y.; Gao, Y.; Liu, J.; Wang, G. Reconstruction of Velocity Curve in Long Stroke and High Dynamic Range Laser Interferometry. Sensors 2021, 21, 7520. https://doi.org/10.3390/s21227520
Feng J, Wu J, Si Y, Gao Y, Liu J, Wang G. Reconstruction of Velocity Curve in Long Stroke and High Dynamic Range Laser Interferometry. Sensors. 2021; 21(22):7520. https://doi.org/10.3390/s21227520
Chicago/Turabian StyleFeng, Jinbao, Jinhui Wu, Yu Si, Yubin Gao, Ji Liu, and Gao Wang. 2021. "Reconstruction of Velocity Curve in Long Stroke and High Dynamic Range Laser Interferometry" Sensors 21, no. 22: 7520. https://doi.org/10.3390/s21227520