
Review of Underwater Sensing Technologies and Applications



Abstract
:1. Introduction
2. Geological Survey
2.1. Seafloor Mapping
2.1.1. Single-Beam Sonar
2.1.2. Multibeam Sonar
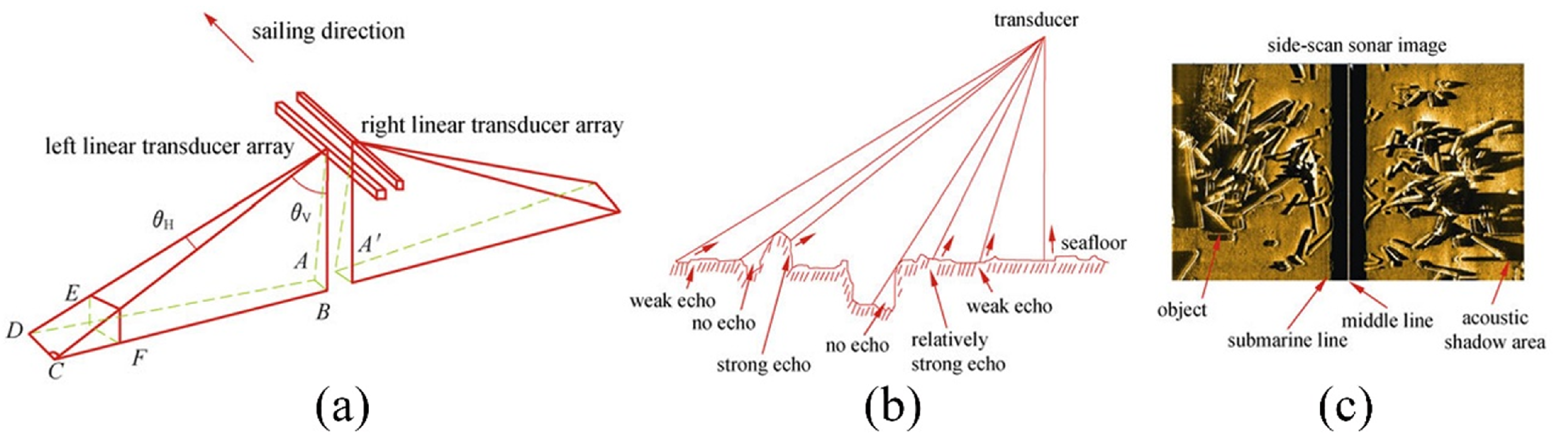
2.1.3. Side-Scan Sonar
2.1.4. Sub-Bottom Profiler
2.2. Resource Exploration
2.2.1. Mineral Resources
2.2.2. Hydrocarbon
3. Navigation and Communication
3.1. Location and Navigation
3.1.1. Inertial/Dead Reckoning
3.1.2. Acoustic Navigation
3.1.3. Geophysical Navigation
3.2. Underwater Communication
3.2.1. Fiber Optic Communication
3.2.2. Underwater Acoustic Communication
3.2.3. Radio Frequency Communication
3.2.4. Underwater Visible Light Communication
4. Essential Ocean Variables
4.1. CTD—Conductivity, Temperature and Depth
4.2. Turbidity
4.3. Dissolved Oxygen
4.4. Dissolved CO2
4.5. pH
4.6. Dissolved Organic Matter
4.7. Nutrients
5. Underwater Inspections
5.1. Underwater Detection
5.1.1. Objects Detection
5.1.2. Security Issues
5.2. Track and Inspect
6. Discussion and Summary
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wang, Y.; Liu, Y.; Guo, Z. Three-dimensional ocean sensor networks: A survey. J. Ocean. Univ. China 2012, 11, 436–450. [Google Scholar] [CrossRef]
- Zhai, M.; Hu, R.; Wang, Y.; Jiang, S.; Wang, R.; Li, J.; Chen, H.; Yang, Z.; Lv, Q.; Qi, T.; et al. Mineral resource science in china: Review and perspective. Geogr. Sustain. 2021, 2, 107–114. [Google Scholar] [CrossRef]
- Hwang, J.; Bose, N.; Nguyen, H.D.; Williams, G. Acoustic search and detection of oil plumes using an autonomous underwater vehicle. J. Mar. Sci. Eng. 2020, 8, 618. [Google Scholar] [CrossRef]
- Jamieson, A. The Hadal Zone: Life in the Deepest Oceans; Cambridge University Press: Cambridge, UK, 2015. [Google Scholar]
- Cong, Y.; Gu, C.; Zhang, T.; Gao, Y. Underwater robot sensing technology: A survey. Fundam. Res. 2021, 1, 337–345. [Google Scholar] [CrossRef]
- Cui, W. An overview of submersible research and development in china. J. Mar. Sci. Appl. 2018, 17, 459–470. [Google Scholar] [CrossRef]
- Mai, C.; Pedersen, S.; Hansen, L.; Jepsen, K.L.; Yang, Z. Subsea infrastructure inspection: A review study. In Proceedings of the 2016 IEEE International Conference on Underwater System Technology: Theory and Applications (USYS), Penang, Malaysia, 13–14 December 2016; pp. 71–76. [Google Scholar]
- Mayer, L.; Jakobsson, M.; Allen, G.; Dorschel, B.; Falconer, R.; Ferrini, V.; Lamarche, G.; Snaith, H.; Weatherall, P. The nippon foundation—GEBCO seabed 2030 project: The quest to see the world’s oceans completely mapped by 2030. Geosciences 2018, 8, 63. [Google Scholar] [CrossRef] [Green Version]
- Menandro, P.S.; Bastos, A.C. Seabed mapping: A brief history from meaningful words. Geosciences 2020, 10, 273. [Google Scholar] [CrossRef]
- Wölfl, A.-C.; Snaith, H.; Amirebrahimi, S.; Devey, C.W.; Dorschel, B.; Ferrini, V.; Huvenne, V.A.I.; Jakobsson, M.; Jencks, J.; Johnston, G.; et al. Seafloor mapping—The challenge of a truly global ocean bathymetry. Front. Mar. Sci. 2019, 6, 283. [Google Scholar] [CrossRef]
- Sandwell, D.T.; Harper, H.; Tozer, B.; Smith, W.H.F. Gravity field recovery from geodetic altimeter missions. Adv. Space Res. 2019, 68, 1059–1072. [Google Scholar] [CrossRef]
- Theberge, A.E. Sounding pole to sea beam. Surv. Cartogr. 1989, 5, 334–346. [Google Scholar]
- Charnock, H. Hms challenger and the development of marine science. J. Navig. 1973, 26, 1–12. [Google Scholar] [CrossRef]
- Urick, R.J. Principles of Underwater Sound-2; McGraw-Hill Book: New York, NY, USA, 1975. [Google Scholar]
- Mayer, L.A. Frontiers in seafloor mapping and visualization. Mar. Geophys. Res. 2006, 27, 7–17. [Google Scholar] [CrossRef]
- Farr, H.K. Multibeam bathymetric sonar: Sea beam and hydro chart. Mar. Geod. 1980, 4, 77–93. [Google Scholar] [CrossRef]
- Violante, C. Acoustic remote sensing for seabed archaeology. In Proceedings of the IMEKO TC4 International Conference on Metrology for Archaeology and Cultural Heritage, Trento, Italy, 22–24 October 2020; pp. 22–24. [Google Scholar]
- HydroSweep DS. Available online: http://www.teledynemarine.com/HydroSweep_DS?ProductLineID=111/ (accessed on 5 September 2021).
- GeoSwath Plus. Available online: https://www.kongsberg.com/globalassets/maritime/km-products/product-documents/geoswath-plus---wide-swath-bathymetry-and-georeferenced-side-scan/Download/ (accessed on 5 September 2021).
- State of the Art in Multibeam Echosounders. Available online: https://atteris.com.au/pipeline-defect-asshttps://www.hydro-international.com/content/article/state-of-the-art-in-multibeam-echosounders/ (accessed on 5 September 2021).
- Wu, Z.; Yang, F.; Tang, Y. High-Resolution Seafloor Survey and Applications; Springer Nature: Berlin/Heidelberg, Germany, 2021. [Google Scholar]
- Oktavia, R.N.A.; Pratomo, D.G. Analysis of Angular Resolution and Range Resolution on Multibeam Echosounder r2 Sonic 2020 in Port of Tanjung Perak (Surabaya); IOP Publishing: Bristol, UK, 2021; Volume 731, p. 012032. [Google Scholar]
- LCS Instruments. Multibeam Sonar Theory of Operation; LCS Instruments: East Walpole, MA, USA, 2000. [Google Scholar]
- Wu, Z.; Yang, F.; Tang, Y. Side-scan sonar and sub-bottom profiler surveying. In High-Resolution Seafloor Survey and Applications; Springer: Berlin/Heidelberg, Germany, 2021; pp. 95–122. [Google Scholar]
- Graham, E.; Ovadia, J.S. Oil exploration and production in sub-saharan africa, 1990-present: Trends and developments. Extr. Ind. Soc. 2019, 6, 593–609. [Google Scholar] [CrossRef]
- Hein, J.R.; Mizell, K.; Koschinsky, A.; Conrad, T.A. Deep-ocean mineral deposits as a source of critical metals for high-and green-technology applications: Comparison with land-based resources. Ore Geol. Rev. 2013, 51, 1–14. [Google Scholar] [CrossRef]
- Cathles, L.M. Future rx: Optimism, preparation, acceptance of risk. Geol. Soc. Lond. Spec. Publ. 2015, 393, 303–324. [Google Scholar] [CrossRef]
- Lusty, P.A.J.; Murton, B.J. Deep-ocean mineral deposits: Metal resources and windows into earth processes. Elem. Int. Mag. Mineral. Geochem. Petrol. 2018, 14, 301–306. [Google Scholar] [CrossRef] [Green Version]
- Olofsson, T. Imagined futures in mineral exploration. J. Cult. Econ. 2020, 13, 265–277. [Google Scholar] [CrossRef] [Green Version]
- Kawada, Y.; Kasaya, T. Marine self-potential survey for exploring seafloor hydrothermal ore deposits. Sci. Rep. 2017, 7, 1–12. [Google Scholar]
- Marine Magnetics, Explorer. Available online: http://marinemagnetics.com/products/marine-magnetometers/explorer/ (accessed on 5 September 2021).
- Kowalczyk, P. Compensation of Magnetic Data for Autonomous Underwater Vehicle Mapping Surveys. US Patent 10,132,956, 20 November 2018. [Google Scholar]
- Safipour, R.; Hölz, S.; Halbach, J.; Jegen, M.; Petersen, S.; Swidinsky, A. A self-potential investigation of submarine massive sulfides: Palinuro seamount, tyrrhenian sea. Geophysics 2017, 82, A51–A56. [Google Scholar] [CrossRef] [Green Version]
- Petersen, S. Rv Meteor Fahrtbericht/Cruise Report m127: Metal Fluxes and Resource Potential at the Slow-Spreading Tag Midocean Ridge Segment (26 °N, MAR)—Blue Mining@ Sea, Bridgetown (Barbados)—Ponta Delgada (Portugal), 25 May–28 June 2016 (Extended Version). Available online: https://oceanrep.geomar.de/34777/1/geomar_rep_ns_32_2016.pdf (accessed on 17 November 2021).
- Brewitt-Taylor, C.R. Self-potential prospecting in the deep oceans. Geology 1975, 3, 541–542. [Google Scholar] [CrossRef]
- Heinson, G.; White, A.; Constable, S.; Key, K. Marine self potential exploration. Explor. Geophys. 1999, 30, 1–4. [Google Scholar] [CrossRef]
- Jahn, F.; Cook, M.; Graham, M. Hydrocarbon Exploration and Production; Elsevier: Amsterdam, The Netherlands, 2008. [Google Scholar]
- Birin, I.; Maglić, L. Analysis of seismic methods used for subsea hydrocarbon exploration. Pomor. Zb. 2020, 58, 77–89. [Google Scholar] [CrossRef]
- Hanssen, P. Passive seismic methods for hydrocarbon exploration. In Third EAGE Passive Seismic Workshop-Actively Passive 2011; European Association of Geoscientists & Engineers: Brussels, Belgium, 2011. [Google Scholar]
- Alsadi, H.N. Seismic Hydrocarbon Exploration; 2D and 3D Techniques, Seismic Waves; Spring: New York, NY, USA, 2017. [Google Scholar]
- Fukasawa, T.; Oketani, T.; Masson, M.; Groneman, J.; Hara, Y.; Hayashi, M. Optimized mets sensor for methane leakage monitoring. In OCEANS 2008-MTS/IEEE Kobe Techno-Ocean; IEEE: Washington, DC, USA, 2008; pp. 1–8. [Google Scholar]
- Boulart, C.; Connelly, D.P.; Mowlem, M.C. Sensors and technologies for in situ dissolved methane measurements and their evaluation using technology readiness levels. TrAC Trends Anal. Chem. 2010, 29, 186–195. [Google Scholar] [CrossRef]
- Wang, F.; Jia, S.; Wang, Y.; Tang, Z. Recent developments in modulation spectroscopy for methane detection based on tunable diode laser. Appl. Sci. 2019, 9, 2816. [Google Scholar] [CrossRef] [Green Version]
- Shen, Z.W.; Sun, C.Y.; He, H.C.; Zhao, J.-W. The principle and applied research of in-situ mets for dissolved methane measurement in deep sea. J. Ocean Technol. 2015, 34, 19–25. [Google Scholar]
- Jalal, F.; Nasir, F. Underwater navigation, localization and path planning for autonomous vehicles: A review. In Proceedings of the 2021 International Bhurban Conference on Applied Sciences and Technologies (IBCAST), Islamabad, Pakistan, 12–16 January 2021; pp. 817–828. [Google Scholar]
- Lin, M.; Yang, C. Auv docking method in a confined reservoir with good visibility. J. Intell. Robot. Syst. 2020, 100, 349–361. [Google Scholar] [CrossRef]
- Hwang, J.; Bose, N.; Fan, S. Auv adaptive sampling methods: A review. Appl. Sci. 2019, 9, 3145. [Google Scholar] [CrossRef] [Green Version]
- Ahmad, N.; Ghazilla, R.A.R.; Khairi, N.M.; Kasi, V. Reviews on various inertial measurement unit (imu) sensor applications. Int. J. Signal Process. Syst. 2013, 1, 256–262. [Google Scholar] [CrossRef] [Green Version]
- Ellipse 2 Micro Series. Available online: https://www.sbg-systems.com/wp-content/uploads/Ellipse_2_Micro_Series_Leaflet.pdf (accessed on 5 September 2021).
- SUBLOCUS DVL. Available online: https://www.advancednavigation.com/products/sublocus-dvl/ (accessed on 5 September 2021).
- Han, Y.; Zheng, C.; Sun, D. Accurate underwater localization using lbl positioning system. In Proceedings of the OCEANS 2015—MTS/IEEE, Washington, DC, USA, 19–22 October 2015; pp. 1–4. [Google Scholar]
- Kongsberg—HiPAP 602. Available online: https://www.kongsberg.com/contentassets/16672e966d5e479495cacfc61116d147/476666a-hipap-602-datasheet.pdf/ (accessed on 5 September 2021).
- Howe, B.M.; Miksis-Olds, J.; Rehm, E.; Sagen, H.; Worcester, P.F.; Haralabus, G. Observing the oceans acoustically. Front. Mar. Sci. 2019, 6, 426. [Google Scholar] [CrossRef] [Green Version]
- Paull, L.; Saeedi, S.; Seto, M.; Li, H. Auv navigation and localization: A review. IEEE J. Ocean. Eng. 2013, 39, 131–149. [Google Scholar] [CrossRef]
- Amarasinghe, C.; Ratnaweera, A.; Maitripala, S. Monocular visual slam for underwater navigation in turbid and dynamic environments. Am. J. Mech. Eng. 2020, 8, 76–87. [Google Scholar] [CrossRef]
- Thomson, D. Acoustic positioning systems. In Proceedings of the OCEANS ’02 MTS/IEEE, Biloxi, MI, USA; Volume 3, pp. 1312–1318.
- Nicosevici, T.; Garcia, R.; Carreras, M.; Villanueva, M. A review of sensor fusion techniques for underwater vehicle navigation. In Oceans’ 04 MTS/IEEE Techno-Ocean’04 (IEEE Cat. No. 04CH37600); IEEE: Washington, DC, USA, 2004; Volume 3, pp. 1600–1605. [Google Scholar]
- Shaukat, N.; Ali, A.; Iqbal, M.J.; Moinuddin, M.; Otero, P. Multi-sensor fusion for underwater vehicle localization by augmentation of rbf neural network and error-state kalman filter. Sensors 2021, 21, 1149. [Google Scholar] [CrossRef] [PubMed]
- Lanzagorta, M. Underwater communications. Synth. Lect. Commun. 2012, 5, 1–129. [Google Scholar] [CrossRef]
- Pranitha, B.; Anjaneyulu, L. Review of research trends in underwater communications—A technical survey. In Proceedings of the 2016 International Conference on Communication and Signal Processing (ICCSP), Melmaruvathur, India, 6–8 April 2016; pp. 1443–1447. [Google Scholar]
- Zhou, S.; Wang, Z. OFDM for Underwater Acoustic Communications; John Wiley & Sons: Hoboken, NJ, USA, 2014. [Google Scholar]
- Demirors, E.; Sklivanitis, G.; Melodia, T.; Batalama, S.N.; Pados, D.A. Software-defined underwater acoustic networks: Toward a high-rate real-time reconfigurable modem. IEEE Commun. Mag. 2015, 53, 64–71. [Google Scholar] [CrossRef]
- Demirors, E.; Sklivanitis, G.; Santagati, G.E.; Melodia, T.; Batalama, S.N. Design of a software-defined underwater acoustic modem with real-time physical layer adaptation capabilities. In Proceedings of the International Conference on Underwater Networks & Systems, Rome, Italy, 12–14 November 2014; pp. 1–8. [Google Scholar]
- Mangione, S.; Galioto, G.E.; Croce, D.; Tinnirello, I.; Petrioli, C. A channel-aware adaptive modem for underwater acoustic communications. IEEE Access 2021, 9, 76340–76353. [Google Scholar] [CrossRef]
- Palmeiro, A.; Martin, M.; Crowther, I.; Rhodes, M. Underwater radio frequency communications. In Proceedings of the OCEANS 2011 IEEE-Spain, Santander, Spain, 6–9 June 2011; pp. 1–8. [Google Scholar]
- Elamassie, M.; Miramirkhani, F.; Uysal, M. Performance characterization of underwater visible light communication. IEEE Trans. Commun. 2018, 67, 543–552. [Google Scholar] [CrossRef]
- Wang, J.; Shi, W.; Xu, L.; Zhou, L.; Niu, Q. Design of optical-acoustic hybrid underwater wireless sensor network. J. Netw. Comput. Appl. 2017, 92, 59–67. [Google Scholar] [CrossRef]
- Wang, C.; Yu, H.-Y.; Zhu, Y.-J. A long distance underwater visible light communication system with single photon avalanche diode. IEEE Photonics J. 2016, 8, 1–11. [Google Scholar] [CrossRef]
- Wang, P.; Pan, X.; Wen, W.; Wang, J.; Yao, B. analysis and integration prospect of underwater communication positioning and navigation technology. Ship Sci. Technol. 2021, 43, 134–138. [Google Scholar]
- Spagnolo, G.S.; Cozzella, L.; Leccese, F. Underwater optical wireless communications: Overview. Sensors 2020, 20, 2261. [Google Scholar] [CrossRef]
- Lacovara, P. High-bandwidth underwater communications. Mar. Technol. Soc. J. 2008, 42, 93–102. [Google Scholar] [CrossRef]
- Elliott, J.E.; Elliott, K.H. Tracking marine pollution. Science 2013, 340, 556–558. [Google Scholar] [CrossRef] [PubMed]
- Willis, K.A.; Serra-Gonçalves, C.; Richardson, K.; Schuyler, Q.A.; Pedersen, H.; Anderson, K.; Stark, J.S.; Vince, J.; Hardesty, B.D.; Wilcox, C.; et al. Cleaner seas: Reducing marine pollution. Rev. Fish Biol. Fish. 2021, 1–16. [Google Scholar] [CrossRef] [PubMed]
- Essential Ocean Variables. Available online: https://www.goosocean.org/index.php?option=com_content&view=article&id=283:essential-ocean-variables&catid=9&Itemid=441 (accessed on 27 October 2021).
- McDougall, T.J.; Jackett, D.R.; Millero, F.J. An algorithm for estimating absolute salinity in the global ocean. Ocean. Sci. Discuss. 2009, 6, 215. [Google Scholar]
- Hamon, B.V. A temperature-salinity-depth recorder. ICES J. Mar. Sci. 1955, 21, 72–73. [Google Scholar] [CrossRef]
- Hamon, B.V.; Brown, N.L. A temperature-chlorinity-depth recorder for use at sea. J. Sci. Instruments 1958, 35, 452. [Google Scholar] [CrossRef]
- Woody, C.; Shih, E.; Miller, J.; Royer, T.; Atkinson, L.P.; Moody, R.S. Measurements of salinity in the coastal ocean: A review of requirements and technologies. Mar. Technol. Soc. J. 2000, 34, 26–33. [Google Scholar] [CrossRef]
- Perkin, R.; Lewis, E. The practical salinity scale 1978: Fitting the data. IEEE J. Ocean. Eng. 1980, 5, 9–16. [Google Scholar] [CrossRef]
- Lewis, E.L.; Perkin, R.G. The practical salinity scale 1978: Conversion of existing data. Deep. Sea Res. Part A Oceanogr. Res. Pap. 1981, 28, 307–328. [Google Scholar] [CrossRef]
- Unesco. Algorithms for Computation of Fundamental Properties of Seawater; Unesco: Paris, France, 1983. [Google Scholar]
- Thermodynamic Equation Of Seawater—2010 (TEOS-10). Available online: http://teos-10.org/ (accessed on 26 October 2021).
- Pawlowicz, R. What Every Oceanographer Needs to Know about Teos-10 (the Teos-10 Primer). 2010. Unpublished Manuscript. Available online: www.TEOS-10.org (accessed on 17 November 2021).
- ISO 7027-1:2016 Water Quality—Determination of Turbidity—Part 1: Quantitative Methods. Available online: https://www.iso.org/standard/62801.html (accessed on 5 September 2021).
- Hasumoto, H.; Imazu, T.; Miura, T.; Kogure, K. Use of an optical oxygen sensor to measure dissolved oxygen in seawater. J. Oceanogr. 2006, 62, 99–103. [Google Scholar] [CrossRef] [Green Version]
- McDonagh, C.; Kolle, C.; McEvoy, A.K.; Dowling, D.L.; Cafolla, A.A.; Cullen, S.J.; MacCraith, B.D. Phase fluorometric dissolved oxygen sensor. Sensors Actuators B Chem. 2001, 74, 124–130. [Google Scholar] [CrossRef]
- Sosna, M.; Denuault, G.; Pascal, R.W.; Prien, R.D.; Mowlem, M. Development of a reliable microelectrode dissolved oxygen sensor. Sens. Actuators B Chem. 2007, 123, 344–351. [Google Scholar] [CrossRef]
- The Oceans Are Absorbing More Carbon Than Previously Thought. Available online: https://www.carbonbrief.org/guest-post-the-oceans-are-absorbing-more-carbon-than-previously-thought/ (accessed on 5 September 2021).
- Aquams. Dissolved CO2 Sensor for In-Situ Measurement. Available online: https://www.aquams.com/submersible-probes/dissolved-co2/?lang=en (accessed on 5 September 2021).
- SGX Sensortech(IS) Ltd. Infrared Sensor Application Note 1: A Background to Gas Sensing by Non-Dispersive Infrared (NDIR). Available online: https://www.sgxsensortech.com/content/uploads/2014/08/AN1-%E2%80%93-A-Background-to-Gas-Sensing-by-Non-Dispersive-Infrared-NDIR.pdf/ (accessed on 5 September 2021).
- Tan, X.; Zhang, H.; Li, J.; Wan, H.; Guo, Q.; Zhu, H.; Liu, H.; Yi, F. Non-dispersive infrared multi-gas sensing via nanoantenna integrated narrowband detectors. Nat. Commun. 2020, 11, 1–9. [Google Scholar] [CrossRef]
- Popa, D.; Udrea, F. Towards integrated mid-infrared gas sensors. Sensors 2019, 19, 2076. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yao, W.; Liu, X.; Byrne, R.H. Impurities in indicators used for spectrophotometric seawater ph measurements: Assessment and remedies. Mar. Chem. 2007, 107, 167–172. [Google Scholar] [CrossRef]
- HydroCAT-EP. Available online: https://www.seabird.com/asset-get.download.jsa?id=54627862545/ (accessed on 5 September 2021).
- Parr, T.B.; Findlay, S.E.G. Methods in Stream Ecology, 3rd ed.; Academic Press: Cambridge, MA, USA, 2017. [Google Scholar]
- Chen, J.; Ye, W.; Guo, J.; Luo, Z.; Li, Y. Diurnal variability in chlorophyll-a, carotenoids, cdom and so42- intensity of offshore seawater detected by an underwater fluorescence-raman spectral system. Sensors 2016, 16, 1082. [Google Scholar] [CrossRef] [Green Version]
- Bridgeman, J.; Bieroza, M.; Baker, A. The application of fluorescence spectroscopy to organic matter characterisation in drinking water treatment. Rev. Environ. Sci. Bio/Technol. 2011, 10, 277–290. [Google Scholar] [CrossRef]
- Lakowicz, J.R. Plasmonics in biology and plasmon-controlled fluorescence. Plasmonics 2006, 1, 5–33. [Google Scholar] [CrossRef]
- UviLux-Compact In Situ UV Fluorometer. Available online: https://chelsea.co.uk/wp-content/uploads/2019/05/1431_UviLux_4pp_V6_artwork_V2.pdf/ (accessed on 5 September 2021).
- EOV Specification Sheet: Nutrients. Available online: https://www.goosocean.org/index.php?option=com_oe&task=viewDocumentRecord&docID=17474/ (accessed on 5 September 2021).
- Johnson, K.S.; Coletti, L.J. In situ ultraviolet spectrophotometry for high resolution and long-term monitoring of nitrate, bromide and bisulfide in the ocean. Deep. Sea Res. Part I Oceanogr. Res. Pap. 2002, 49, 1291–1305. [Google Scholar] [CrossRef]
- Helms, J.R.; Stubbins, A.; Ritchie, J.D.; Minor, E.C.; Kieber, D.J.; Mopper, K. Absorption spectral slopes and slope ratios as indicators of molecular weight, source, and photobleaching of chromophoric dissolved organic matter. Limnol. Oceanogr. 2008, 53, 955–969. [Google Scholar] [CrossRef] [Green Version]
- Roemmich, D.; Alford, M.H.; Claustre, H.; Johnson, K.; King, B.; Moum, J.; Oke, P.; Owens, W.B.; Pouliquen, S.; Purkey, S.; et al. On the future of argo: A global, full-depth, multi-disciplinary array. Front. Mar. Sci. 2019, 6, 439. [Google Scholar] [CrossRef] [Green Version]
- A SOCCOM Profiling Float Thumbnail. Available online: https://argo.ucsd.edu/outreach/media/schematics/a-soccom-profiling-float-thumbnail// (accessed on 5 September 2021).
- Steinhart, J.S.; Hart, S.R. Calibration curves for thermistors. In Deep Sea Research and Oceanographic Abstracts; Elsevier: Amsterdam, The Netherlands, 1968; Volume 15, pp. 497–503. [Google Scholar]
- Rebello, L.R.B.; Siepman, T.; Drexler, S. Correlations between tds and electrical conductivity for high-salinity formation brines characteristic of south atlantic pre-salt basins. Water SA 2020, 46, 602–609. [Google Scholar]
- Rusydi, A.F. Correlation between conductivity and total dissolved solid in various type of water: A review. In IOP Conference Series: Earth and Environmental Science; IOP Publishing: Bristol, UK, 2018; Volume 118, p. 012019. [Google Scholar]
- Hakim, W.L.; Hasanah, L.; Mulyanti, B.; Aminudin, A. Characterization of turbidity water sensor sen0189 on the changes of total suspended solids in the water. J. Phys. Conf. Ser. 2019, 1280, 022064. [Google Scholar] [CrossRef]
- Mylvaganaru, S.; Jakobsen, T. Turbidity sensor for underwater applications. In IEEE Oceanic Engineering Society. OCEANS’98. Conference Proceedings (Cat. No. 98CH36259); IEEE: Washington, DC, USA, 1998; Volume 1, pp. 158–161. [Google Scholar]
- Measuring Dissolved Oxygen. Fonderiest Environmental Learning Center. Available online: https://www.fondriest.com/environmental-measurements/measurements/measuring-water-quality/dissolved-oxygen-sensors-and-methods/ (accessed on 5 September 2021).
- Wei, Y.; Jiao, Y.; An, D.; Li, D.; Li, W.; Wei, Q. Review of dissolved oxygen detection technology: From laboratory analysis to online intelligent detection. Sensors 2019, 19, 3995. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- The Dissolved Oxygen Handbook. YSI. Available online: https://www.fondriest.com/pdf/ysi_do_handbook.pdf// (accessed on 5 September 2021).
- Vivaldi, F.; Salvo, P.; Poma, N.; Bonini, A.; Biagini, D.; Noce, L.D.; Melai, B.; Lisi, F.; Francesco, F.D. Recent advances in optical, electrochemical, and field effect ph sensors. Chemosensors 2021, 9, 33. [Google Scholar] [CrossRef]
- Colorimetric and Potentiometric pH Measurement, Chapter 23—Introduction to continuous Analytical Measurement. Available online: https://control.com/textbook/continuous-analytical-measurement/ph-measurement/// (accessed on 5 September 2021).
- Optical Nitrate Measurement. Leibniz Institute for Baltic Sea Research Warnemünde. Available online: https://www.io-warnemuende.de/optical-nitrate-measurement.html// (accessed on 5 September 2021).
- Han, S.; Jeong, Y.H.; Jung, J.H.; Begley, A.; Choi, E.; Yoo, S.J.; Jang, J.H.; Kim, H.; Nam, S.W.; Kim, J.Y. Spectrophotometric analysis of phosphoric acid leakage in high-temperature phosphoric acid-doped polybenzimidazole membrane fuel cell application. J. Sens. 2016, 2016, 5290510. [Google Scholar] [CrossRef]
- Pellerin, B.A.; Bergamaschi, B.A.; Downing, B.D.; Saraceno, J.F.; Garrett, J.D.; Olsen, L.D. Optical Techniques for the Determination of Nitrate in Environmental Waters: Guidelines for Instrument Selection, Operation, Deployment, Maintenance, Quality Assurance, and Data Reporting. US Geological Survey Techniques and Methods 1–D5. 2013. Available online: https://pubs.usgs.gov/tm/01/d5/ (accessed on 17 November 2021).
- Ryu, H.; Thompson, D.; Huang, Y.; Li, B.; Lei, Y. Electrochemical sensors for nitrogen species: A review. Sensors Actuators Rep. 2020, 2020, 100022. [Google Scholar] [CrossRef]
- Stradiotto, N.R.; Yamanaka, H.; Zanoni, M.V.B. Electrochemical sensors: A powerful tool in analytical chemistry. J. Braz. Chem. Soc. 2013, 14. [Google Scholar] [CrossRef] [Green Version]
- Rong, Y.; Liang, X.S. A study of the impact of the fukushima nuclear leak on east china coastal regions. Atmosphere-Ocean 2018, 56, 254–267. [Google Scholar] [CrossRef]
- Yamamoto, T. Radioactivity of fission product and heavy nuclides deposited on soil in fukushima dai-ichi nuclear power plant accident: Fukushima npp accident related. J. Nucl. Sci. Technol. 2012, 49, 1116–1133. [Google Scholar] [CrossRef] [Green Version]
- Han, Y.; Nambi, I.M.; Clement, T.P. Environmental impacts of the chennai oil spill accident—A case study. Sci. Total. Environ. 2018, 626, 795–806. [Google Scholar] [CrossRef]
- Teal, J.M.; Howarth, R.W. Oil spill studies: A review of ecological effects. Environ. Manag. 1984, 8, 27–43. [Google Scholar] [CrossRef]
- Sharma, S.; Chatterjee, S. Microplastic pollution, a threat to marine ecosystem and human health: A short review. Environ. Sci. Pollut. Res. 2017, 24, 21530–21547. [Google Scholar] [CrossRef]
- Mai, L.; Bao, L.; Shi, L.; Wong, C.S.; Zeng, E.Y. A review of methods for measuring microplastics in aquatic environments. Environ. Sci. Pollut. Res. 2018, 25, 11319–11332. [Google Scholar] [CrossRef]
- McNutt, M. The hunt for MH370. Science 2014, 344, 947. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Mcleod, D.; Jacobson, J. Advances in autonomous deepwater inspection. Presented at the OTC Brasil, Rio de Janeiro, Brazil, 29–31 October 2013. [Google Scholar] [CrossRef]
- Drap, P.; Seinturier, J.; Scaradozzi, D.; Gambogi, P.; Long, L.; Gauch, F. Photogrammetry for virtual exploration of underwater archeological sites. In Proceedings of the 21st International Symposium, CIPA, Athens, Greece, 1–6 October 2007. [Google Scholar]
- Stieglitz, T.C.; Waterson, P. Impact of cyclone yasi on the wreck of the ss yongala documented by comparative multibeam bathymetry analysis. Qld. Archaeol. Res. 2013, 16, 33–43. [Google Scholar] [CrossRef] [Green Version]
- Castillón, M.; Palomer, A.; Forest, J.; Ridao, P. State of the art of underwater active optical 3d scanners. Sensors 2019, 19, 5161. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kocak, D.M.; Dalgleish, F.R.; Caimi, F.M.; Schechner, Y.Y. A focus on recent developments and trends in underwater imaging. Mar. Technol. Soc. J. 2008, 42, 52–67. [Google Scholar] [CrossRef]
- Kwon, Y.-H. Object plane deformation due to refraction in two-dimensional underwater motion analysis. J. Appl. Biomech. 1999, 15, 396–403. [Google Scholar] [CrossRef]
- Explorer Pro Bowtech. Available online: http://www.teledynemarine.com/explorer-pro?ProductLineID=121/ (accessed on 5 September 2021).
- Sedlazeck, A.; Koch, R. Perspective and non-perspective camera models in underwater imaging—Overview and error analysis. In Outdoor and Large-Scale Real-World Scene Analysis; Springer: Berlin/Heidelberg, Germany, 2012; pp. 212–242. [Google Scholar]
- Passaro, S.; Barra, M.; Saggiomo, R.; Giacomo, S.D.; Leotta, A.; Uhlen, H.; Mazzola, S. Multi-resolution morpho-bathymetric survey results at the pozzuoli—Baia underwater archaeological site (naples, italy). J. Archaeol. Sci. 2013, 40, 1268–1278. [Google Scholar] [CrossRef]
- Plets, R.M.K.; Dix, J.K.; Adams, J.R.; Bull, J.M.; Henstock, T.J.; Gutowski, M.; Best, A.I. The use of a high-resolution 3d chirp sub-bottom profiler for the reconstruction of the shallow water archaeological site of the grace dieu (1439), river hamble, uk. J. Archaeol. Sci. 2009, 36, 408–418. [Google Scholar] [CrossRef]
- Gourry, J.-C.; Vermeersch, F.; Garcin, M.; Giot, D. Contribution of geophysics to the study of alluvial deposits: A case study in the val d’avaray area of the river loire, france. J. Appl. Geophys. 2003, 54, 35–49. [Google Scholar] [CrossRef]
- Qin, T.; Zhao, Y.; Lin, G.; Hu, S.; An, C.; Geng, D.; Rao, C. Underwater archaeological investigation using ground penetrating radar: A case analysis of shanglinhu yue kiln sites (china). J. Appl. Geophys. 2018, 154, 11–19. [Google Scholar] [CrossRef]
- Bloomer, S.; Kowalczyk, P.; Williams, J.; Wass, T.; Enmoto, K. Compensation of magnetic data for autonomous underwater vehicle mapping surveys. In Proceedings of the 2014 IEEE/OES Autonomous Underwater Vehicles (AUV), Oxford, MI, USA, 6–9 October 2014; pp. 1–4. [Google Scholar]
- Costa, M.; Pinto, J.; Ribeiro, M.; Lima, K.; Monteiro, A.; Kowalczyk, P.; Sousa, J. Underwater archaeology with light auvs. In OCEANS 2019-Marseille; IEEE: Washington, DC, USA, 2019; pp. 1–6. [Google Scholar]
- Weber, C. Maritime Terrorist Threat: Focus Report; New York State Office of Homeland Security: New York, NY, USA, 2006. [Google Scholar]
- Buelow, H.; Birk, A. Diver detection by motion-segmentation and shape-analysis from a moving vehicle. In OCEANS’11 MTS/IEEE KONA; IEEE: Washington, DC, USA, 2019; pp. 1–7. [Google Scholar]
- Kessel, R.T.; Hollett, R.D. Underwater intruder detection sonar for harbour protection: State of the art review and implications. In Proceedings of the Second IEEE International Conference on Technologies for Homeland Security and Safety, Istanbul, Turkey, 9–13 October 2006; Available online: https://www.researchgate.net/profile/Reginald-Hollett/publication/228995099_Underwater_Intruder_detection_sonar_for_harbour_protection_state_of_the_art_review_and_implications/links/0deec525fe3e973508000000/Underwater-Intruder-detection-sonar-for-harbour-protection-state-of-the-art-review-and-implications.pdf (accessed on 17 November 2021).
- Tu, Q.; Yuan, F.; Yang, W.; Cheng, E. An approach for diver passive detection based on the established model of breathing sound emission. J. Mar. Sci. Eng. 2020, 8, 44. [Google Scholar] [CrossRef] [Green Version]
- Remmas, W.; Chemori, A.; Kruusmaa, M. Diver tracking in open waters: A low-cost approach based on visual and acoustic sensor fusion. J. Field Robot. 2021, 38, 494–508. [Google Scholar] [CrossRef]
- Stack, J. Automation for underwater mine recognition: Current trends and future strategy. In Detection and Sensing of Mines, Explosive Objects, and Obscured Targets XVI; International Society for Optics and Photonics: Bellingham, WA, USA, 2011; Volume 8017, p. 80170K. [Google Scholar]
- Padmaja, V.; Rajendran, V.; Vijayalakshmi, P. Study on metal mine detection from underwater sonar images using data mining and machine learning techniques. J. Ambient. Intell. Humaniz. Comput. 2021, 12, 5083–5092. [Google Scholar] [CrossRef]
- Phung, S.L.; Nguyen, T.N.A.; Le, H.T.; Chapple, P.B.; Ritz, C.H.; Bouzerdoum, A.; Tran, L.C. Mine-like object sensing in sonar imagery with a compact deep learning architecture for scarce data. In Proceedings of the 2019 Digital Image Computing: Techniques and Applications (DICTA), Perth, Australia, 2–4 December 2019; pp. 1–7. [Google Scholar]
- Rao, C.; Mukherjee, K.; Gupta, S.; Ray, A.; Phoha, S. Underwater mine detection using symbolic pattern analysis of sidescan sonar images. In Proceedings of the 2009 American Control Conference, Saint Louis, MO, USA, 10–12 June 2009; pp. 5416–5421. [Google Scholar]
- Submarine Cable Frequently Asked Questions. Available online: https://www2.telegeography.com/submarine-cable-faqs-frequently-asked-questions (accessed on 5 September 2021).
- Reda, A.; Thiedeman, J.; Elgazzar, M.A.; Shahin, M.A.; Sultan, I.A.; McKee, K.K. Design of subsea cables/umbilicals for in-service abrasion-part 1: Case studies. Ocean. Eng. 2021, 2021, 108895. [Google Scholar] [CrossRef]
- Submarine Cables, the True Communication Highway. Available online: https://www.mapfreglobalrisks.com/gerencia-riesgos-seguros/article/submarine-cables-the-true-communication-highway/?lang=en (accessed on 5 September 2021).
- Jackson, L.A. Submarine Communication Cable Including Optical Fibres within an Electrically Conductive Tube, England. U.S. Patent US 4,278,835, 14 July 1981. [Google Scholar]
- Szyrowski, T.; Sharma, S.K.; Sutton, R.; Kennedy, G.A. Developments in subsea power and telecommunication cables detection: Part 2-electromagnetic detection. Underw. Technol. 2013, 31, 133–143. [Google Scholar] [CrossRef]
- Zhang, J.; Zhang, Q.; Xiang, X. Automatic inspection of subsea optical cable by an autonomous underwater vehicle. In Proceedings of the OCEANS 2017-Aberdeen, Aberdeen, Scotland, 19–22 June 2017; pp. 1–6. [Google Scholar]
- Xiang, X.; Yu, C.; Niu, Z.; Zhang, Q. Subsea cable tracking by autonomous underwater vehicle with magnetic sensing guidance. Sensors 2016, 16, 1335. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ho, M.; El-Borgi, S.; Patil, D.; Song, G. Inspection and monitoring systems subsea pipelines: A review paper. Struct. Health Monit. 2020, 19, 606–645. [Google Scholar] [CrossRef] [Green Version]
- Pipeline Defect Assessment. Available online: https://atteris.com.au/pipeline-defect-assessment/ (accessed on 5 September 2021).
- Shi, Y.; Zhang, C.; Li, R.; Cai, M.; Jia, G. Theory and application of magnetic flux leakage pipeline detection. Sensors 2015, 15, 31036–31055. [Google Scholar] [CrossRef] [PubMed]
- Sposito, G.; Cawley, P.; Nagy, P.B. Potential drop mapping for the monitoring of corrosion or erosion. Ndt & E Int. 2010, 43, 394–402. [Google Scholar]
- Wassink, C.; Hol, M.; Flikweert, A.; van Meer, P. Toward practical 3d radiography of pipeline girth welds. In AIP Conference Proceedings; American Institute of Physics: New York, NY, USA, 2015; Volume 1650, pp. 519–524. [Google Scholar]
- Li, G.; Chen, X.; Zhou, F.; Liang, Y.; Xiao, Y.; Cao, X.; Zhang, Z.; Zhang, M.; Wu, B.; Yin, S.; et al. Self-powered soft robot in the mariana trench. Nature 2021, 591, 66–71. [Google Scholar] [CrossRef] [PubMed]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Single-Beam Sonar | Side-Scan Sonar | Multi-Beam Sonar | |
|---|---|---|---|
| Number of Beams | 1 | 2 | 256 (typical) |
| Number of transducers | 1 | 2 | 1 |
| Coverage | Solid angle size of the beam | Two scan beams tilted away from the vessel, up to 240° | Up to 160° directly below the vessel; Theoretically up to 320° with a Dual Head MBES |
| Deployment Position | Bottom of vessels or subs | Sides Bottom of vessels or subs | Bottom of vessels or subs |
| Nadir Zone Achievable | Yes | No | Yes |
| Ability to accurately resolve vertical features | No | No | Yes |
| Ability to map irregular seafloors | No | Fair | Excellent |
| Classifications | Principles | Methods | Characteristics |
|---|---|---|---|
| Inertial/dead reckoning | uses accelerometers and gyroscopes to estimate the current state | Magnetic compass, barometer or pressure sensor, DVL, INS | Increasing and unbounded position error |
| Acoustic Navigation | measuring the time of flight (TOF) of signals from acoustic beacons to perform navigate | LBL, UBL, USBL | Depending on beacons |
| Geophysical Navigation | use external environmental information as references for navigation | Magnetic field maps, visual-based seabed images, identify feature acoustically | Depending on sensors to identify environmental features |
| Pressure Sensors | Advantages | Disadvantages |
|---|---|---|
| Piezoresistive | simple structure, small size, high precision | low robustness |
| Capacitive | simple structure, high precision, high robustness | large non-linear error |
| Resonant | stable construction, high precision, high stability | complex manufacturing and high cost |
| Category | Objectives | Sensor Type | Working Principle | Calculation Theory | Representative Sensors | Reference |
|---|---|---|---|---|---|---|
| Physical EOVs | CTD:Depth | Pressure-sensitive | The external pressure results in the change of electric-signals which can reflect the ambient water pressure. | Liquid Pressure Formula | SBE 41/41CP Argo CTD; Rockland Scientific MicroCTD; OTT CTD Sensor | - |
| CTD:Temperature | Thermistor | The resistance change of thermistor is related to the change of temperature. | Steinhart-Hart Equation | [105] | ||
| CTD:Salinity | Electric | Water salinity is proportional to its conductivity. | Empirical Formula | [106,107] | ||
| Biochemical EOVs | Turbidity | Optical IR | Certain frequency IR pulse is transmitted to water, and the intensity of scattered or passed IR light detected | Empirical Formulas | Aanderaa Turbidity Sensor 4112; Chelsea Technologies UniLux Turbidity | [108,109] |
| Dissolved Oxygen | Optical Blue Light (Reagent Needed) | DO pass through semi-permeable membrane and reacts with substrate film attached to fluorescence-sensitive substances. Blue light excites the fluorescence quenching reaction | Stern-Volmer Equation | SBE 63 Optical Dissolved Oxygen Sensor | [110,111,112] | |
| Electrochemical | DO involved redox reaction generates an electrical current, whose amplitude is directly related to the DO concentration. | Redox Reaction Electrochemical Equations | SBE 43 Dissolved Oxygen Sensor | [110,111] | ||
| Dissolved CO2 | Optical IR | Dissolved CO2 passes through silicone membrane into a detection chamber. The absorption of IR intensity is proportional to the concentration of the CO2 | Lambert-Beer Law | SubCTech Underwater CO2 Sensor MK5 | ||
| pH | Electrochemical | Electro-potential caused by different concentration between the reference and analyte solution. | Nernst Equation | SBE SeaFET V2 Ocean pH Sensor; Seanic pH probe | [113,114] | |
| Dissolved Organic Matter | Optical UV | High energy UV excite the fluorescence of different DOMs. | Excitation-Emission Matrix (EEM) | SBE HydroCAT-EP | [97,102] | |
| Nutrients: Nitrate | Optical UV | Concentration derivates from the intensity difference of the incident and transimission lights. | Lambert-Beer Law | SBE SUNA V2 | [115,116,117] | |
| Nutrients: Phosphates | Optical Visible—IR (Reagent Needed) | SBE HydroCycle-PO4 | ||||
| Nutrients: Ammonium | Electrochemical Potentiometric | The open-circuit potential (OCP) between the working and reference electrodes will be measured by a high impedance voltmeter without current flow. Since only the target ions can pass the membrane on working electrode, the OCP can reflect the concentration of target ions | Concentration of ions is relevant to the OCP | Xylem ISE sensor for ammonium-WTW | [118,119] |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, K.; Cui, W.; Chen, C. Review of Underwater Sensing Technologies and Applications. Sensors 2021, 21, 7849. https://doi.org/10.3390/s21237849
Sun K, Cui W, Chen C. Review of Underwater Sensing Technologies and Applications. Sensors. 2021; 21(23):7849. https://doi.org/10.3390/s21237849
Chicago/Turabian StyleSun, Kai, Weicheng Cui, and Chi Chen. 2021. "Review of Underwater Sensing Technologies and Applications" Sensors 21, no. 23: 7849. https://doi.org/10.3390/s21237849
APA StyleSun, K., Cui, W., & Chen, C. (2021). Review of Underwater Sensing Technologies and Applications. Sensors, 21(23), 7849. https://doi.org/10.3390/s21237849