
Completion of Metal-Damaged Traces Based on Deep Learning in Sinogram Domain for Metal Artifacts Reduction in CT Images


Abstract
:1. Introduction
2. Materials and Methods
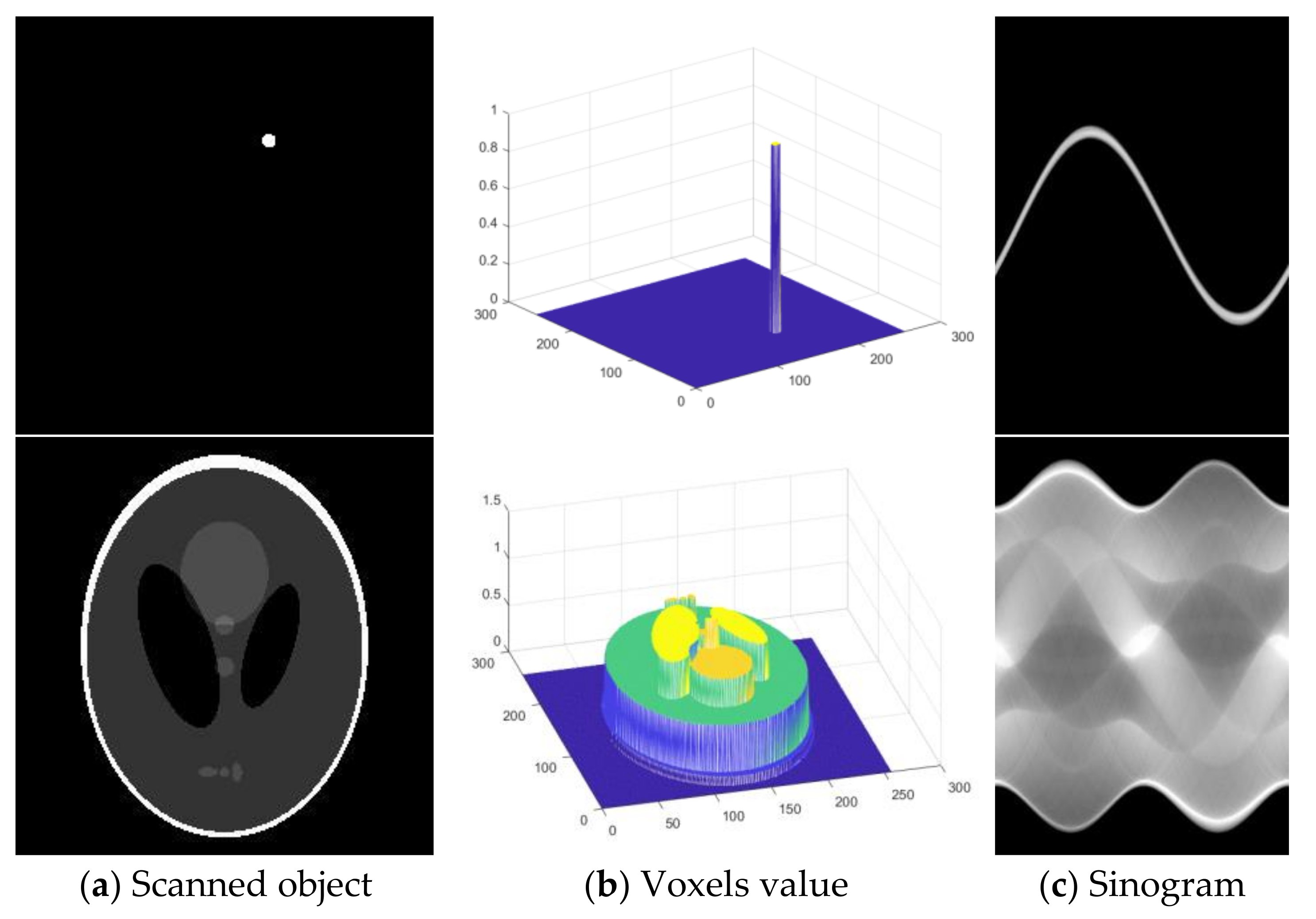
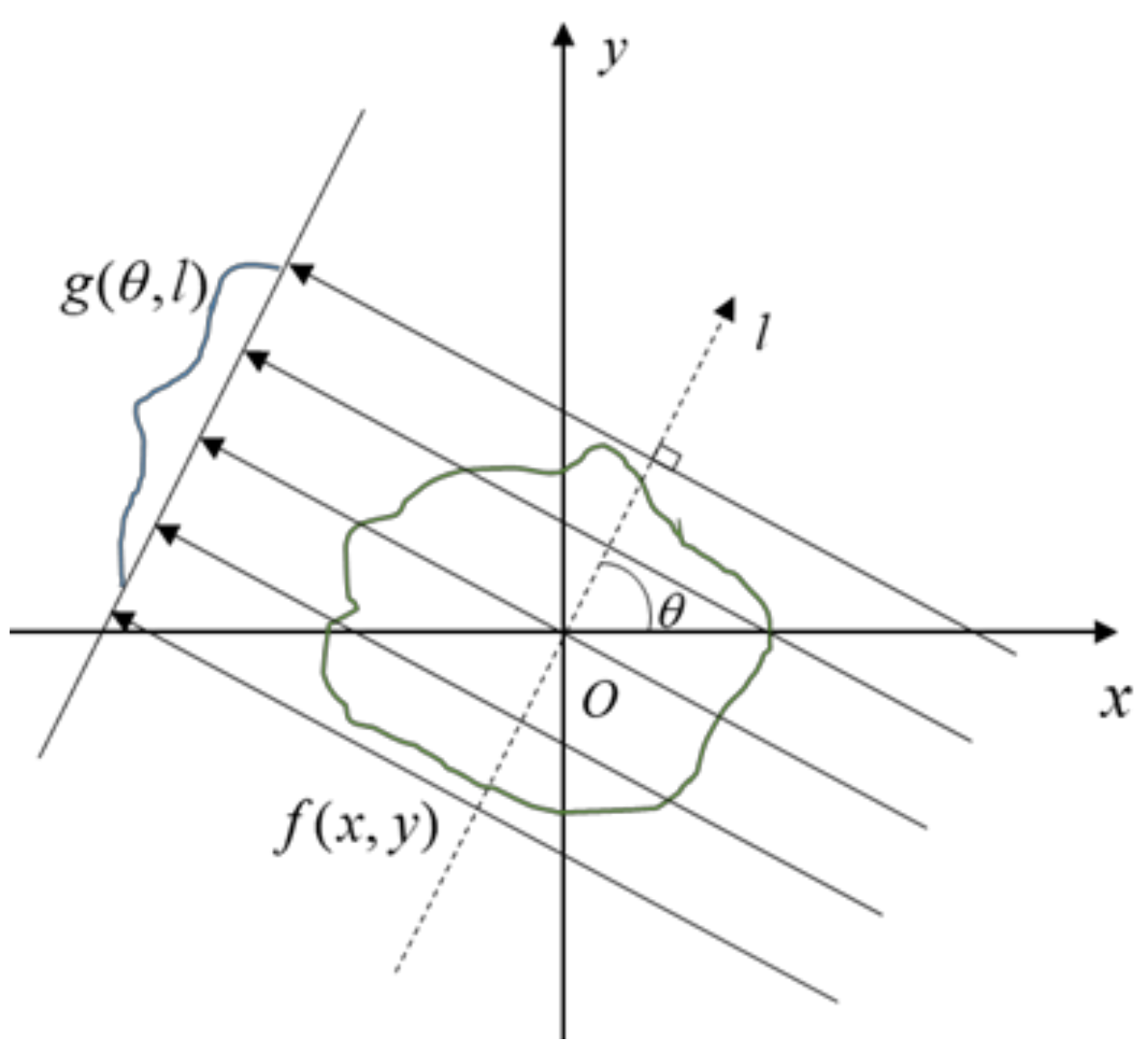
2.1. Dataset Generation
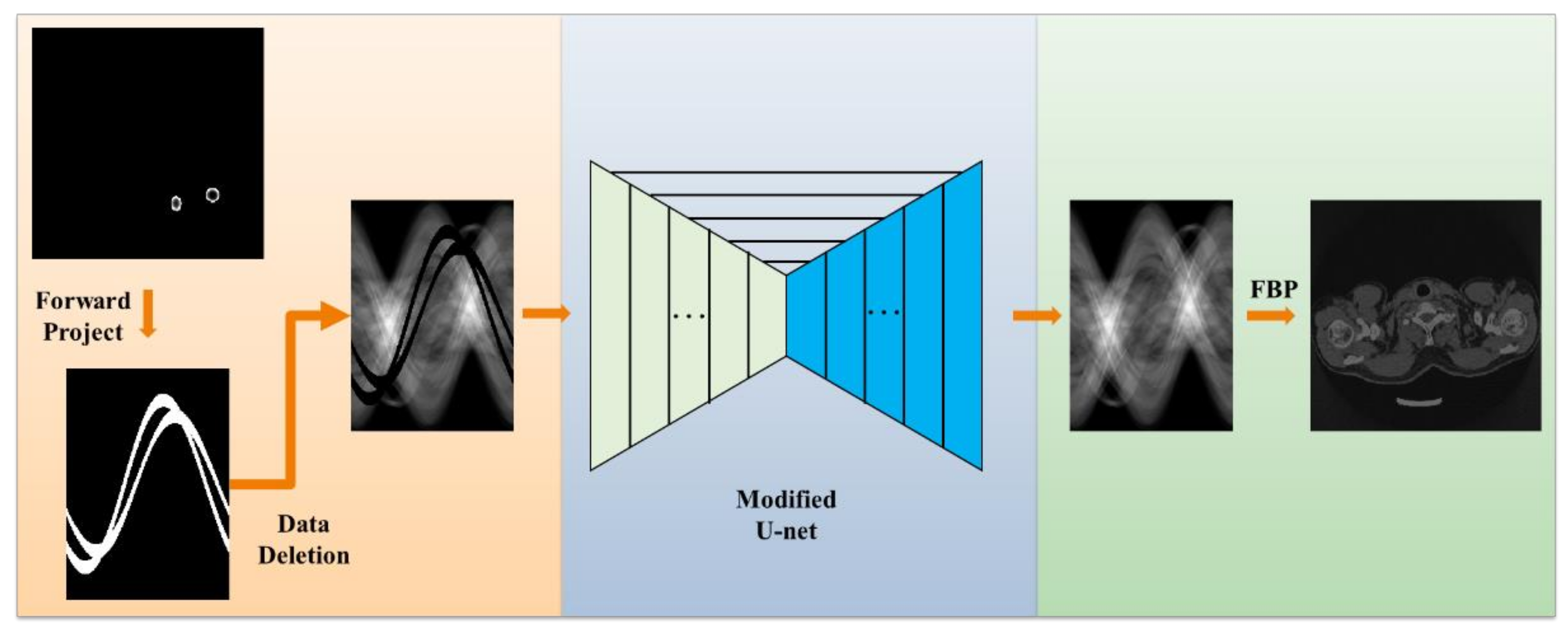
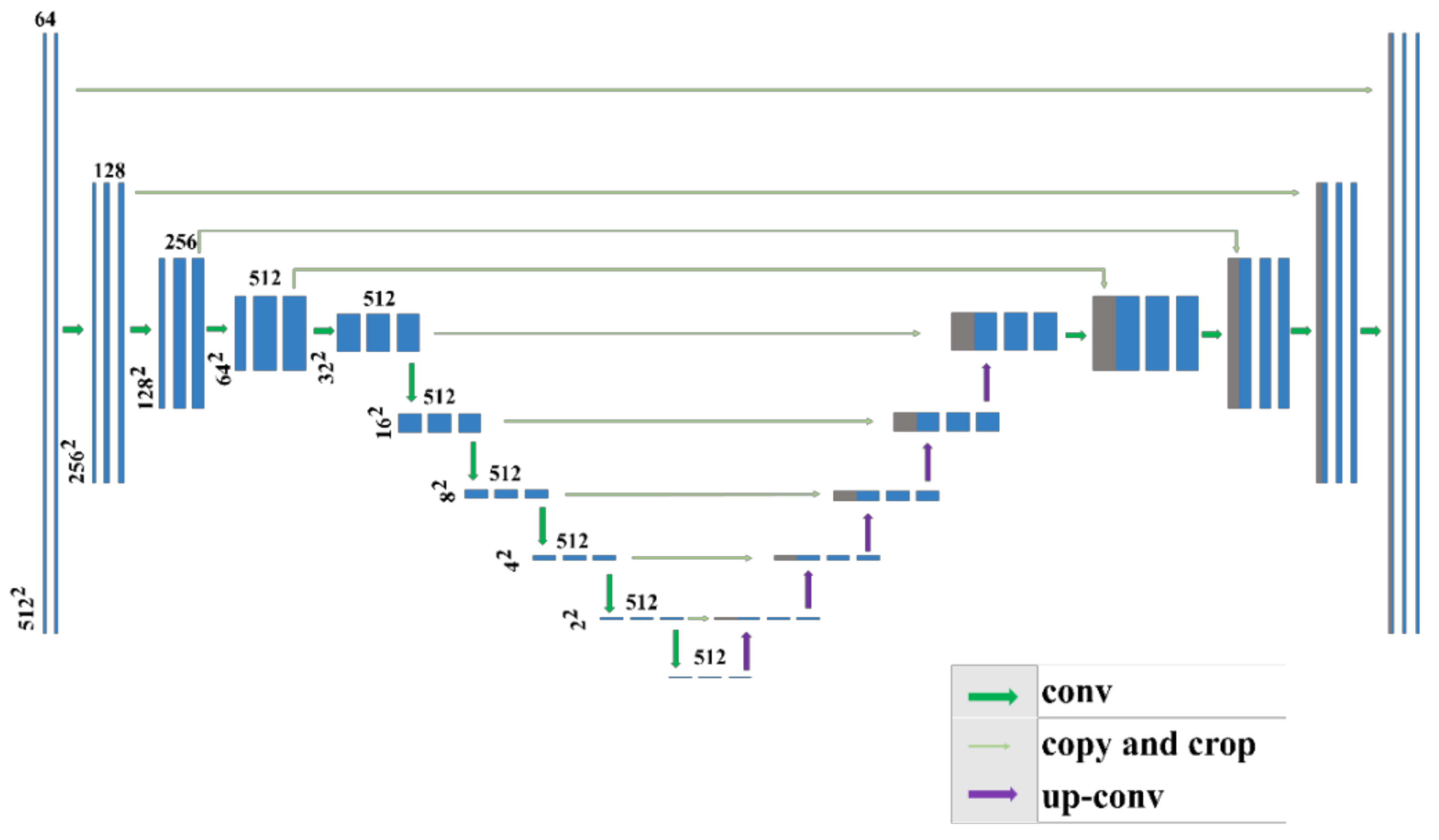
2.2. Network Architecture
2.3. Loss Function and Training
3. Results
3.1. Evaluation Metrics
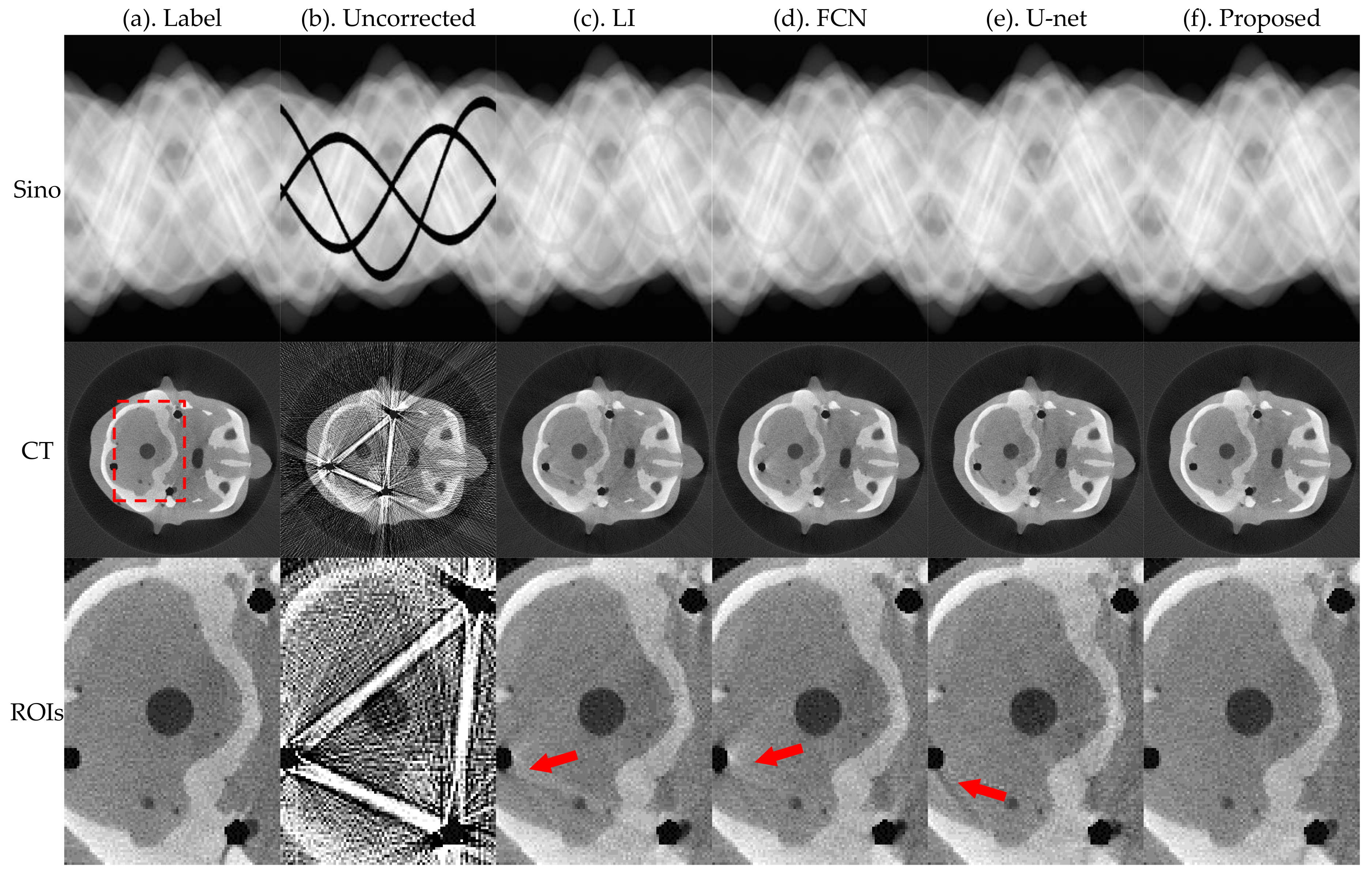
3.2. Simulation Results
3.3. Experimental Results
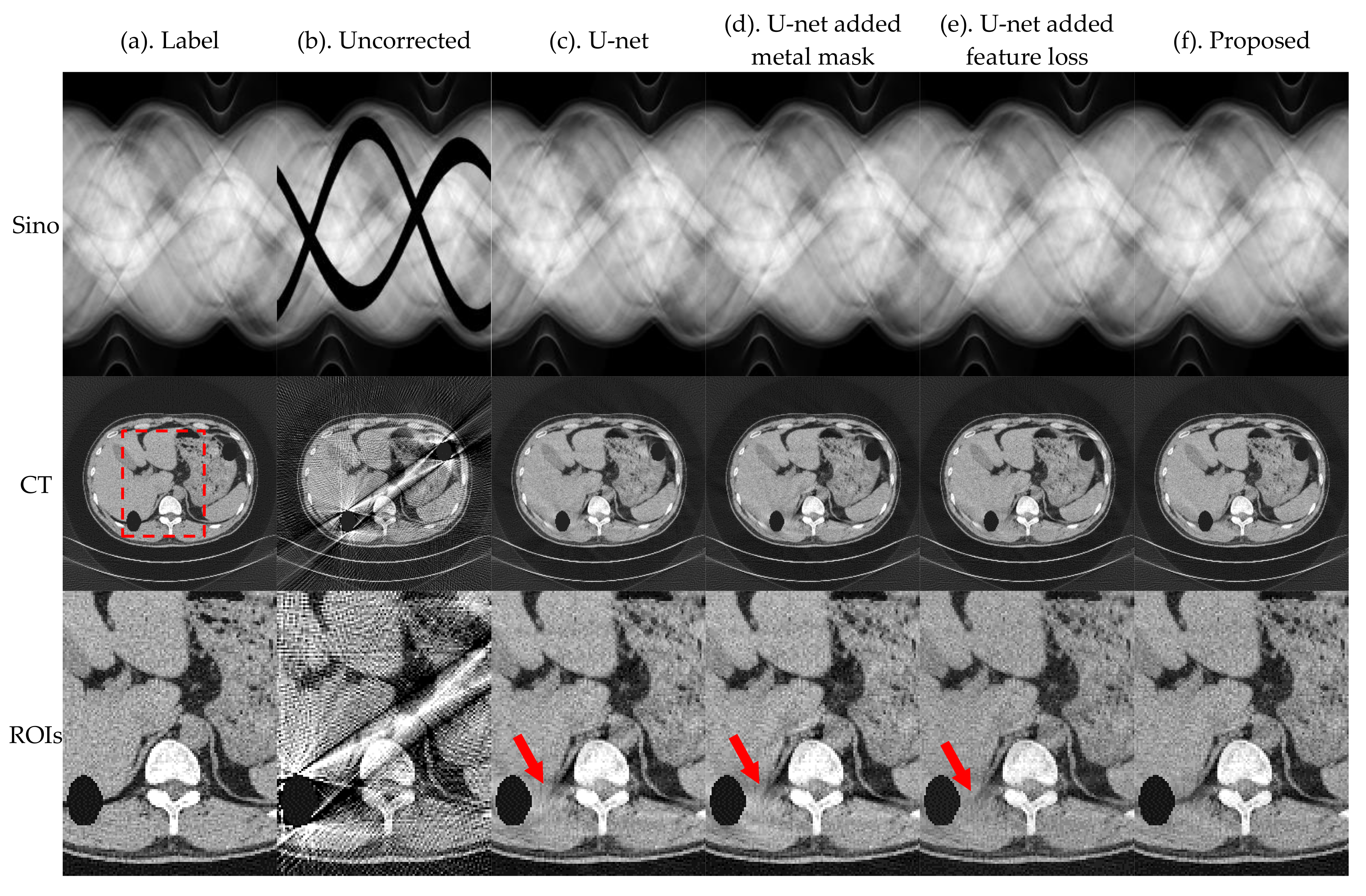
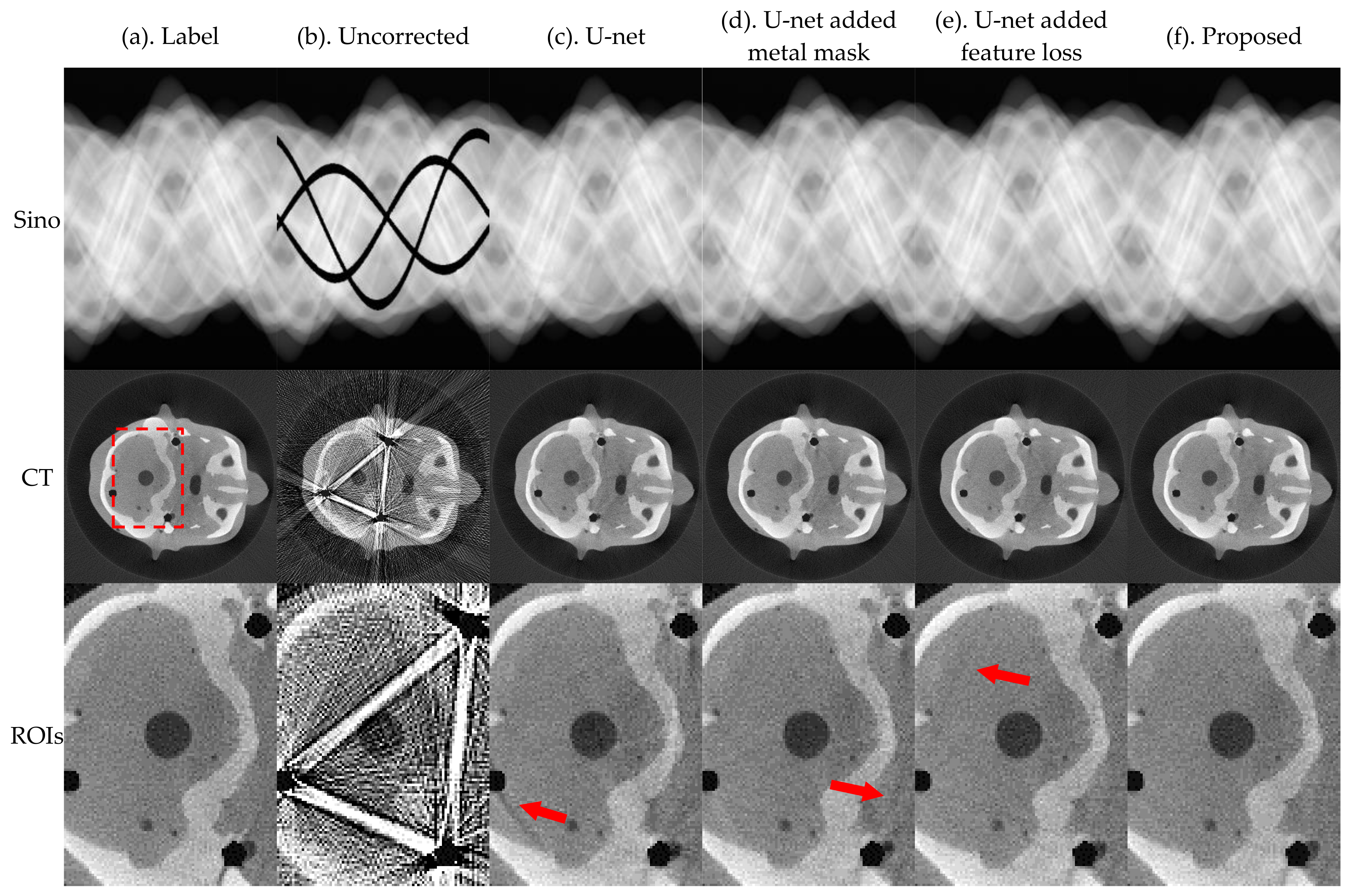
3.4. Ablation Study
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zeng, G. Medical Image Reconstruction; Springer: Berlin/Heidelberg, Germany, 2010. [Google Scholar]
- Jiang, H. Computed Tomography: Principles, Design, Artifacts, and Recent Advances, 2nd ed.; SPIE—The International Society for Optical Engineering: Bellingham, WA, USA, 2009. [Google Scholar]
- Zhang, X.; Wang, J.; Xing, L. Metal artifact reduction in x-ray computed tomography (CT) by constrained optimization. Med. Phys. 2011, 38, 701–711. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gjesteby, L.; Man, B.D.; Jin, Y.; Paganetti, H.; Verburg, J.; Giantsoudi, D.; Ge, W. Metal Artifact Reduction in CT: Where Are We After Four Decades? IEEE Access 2016, 4, 5826–5849. [Google Scholar] [CrossRef]
- Wang, G.; Snyder, D.L.; O’Sullivan, J.A.; Vannier, M.W. Iterative deblurring for CT metal artifact reduction. IEEE Trans. Med. Imaging 1996, 15, 657–664. [Google Scholar] [CrossRef]
- Hui, X.; Li, Z.; Xiao, Y.; Chen, Z.; Xing, Y. Metal Artifact Reduction in Dual Energy CT by Sinogram Segmentation Based on Active Contour Model and TV Inpainting. In Proceedings of the Nuclear Science Symposium Conference Record, Orlando, FL, USA, 24 October–1 November 2009. [Google Scholar]
- Wang, J.; Xing, L. Accurate Determination of the Shape and Location of Metal Objects in X-Ray Computed Tomography. Proceed. SPIE-Int. Soc. Opt. Eng. 2010, 7622, 179. [Google Scholar]
- Wang, J.; Xing, L. A Binary Image Reconstruction Technique for Accurate Determination of the Shape and Location of Metal Objects in X-Ray Computed Tomography. J. X-ray Sci. Technol. 2010, 18, 403–414. [Google Scholar] [CrossRef]
- Zhang, Y.; Mou, X.; Hao, Y. Weighted Total Variation constrained reconstruction for reduction of metal artifact in CT. In Proceedings of the Nuclear Science Symposium Conference Record, Knoxville, TN, USA, 30 October–6 November 2010. [Google Scholar]
- Jiyoung, C.; Kyung Sang, K.; Woo, K.M.; Won, S.; Jong Chul, Y. Sparsity driven metal part reconstruction for artifact removal in dental CT. J. X-ray Sci. Technol. 2011, 19, 457–475. [Google Scholar]
- Levakhina, Y.M.; Muller, J.; Duschka, R.L.; Vogt, F.; Barkhausen, J.; Buzug, T.M. Weighted simultaneous algebraic reconstruction technique for tomosynthesis imaging of objects with high-attenuation features. Med. Phys. 2013, 40, 031106. [Google Scholar] [CrossRef]
- Kalender, W.A.; Hebel, R.; Ebersberger, J. Reduction of CT artifacts caused by metallic implants. Radiology 1987, 164, 576–577. [Google Scholar] [CrossRef] [PubMed]
- Mahnken, A.H.; Raupach, R.; Wildberger, J.E.; Jung, B.; Heussen, N.; Flohr, T.G.; Gunther, R.W.; Schaller, S. A new algorithm for metal artifact reduction in computed tomography: In vitro and in vivo evaluation after total hip replacement. Investig. Radiol. 2003, 38, 769–775. [Google Scholar] [CrossRef]
- Bal, M.; Spies, L. Metal artifact reduction in CT using tissue-class modeling and adaptive prefiltering. Med. Phys. 2006, 33, 2852. [Google Scholar] [CrossRef] [Green Version]
- Meyer, E.; Raupach, R.; Lell, M.; Schmidt, B.; Kachelriess, M. Normalized metal artifact reduction (NMAR) in computed tomography. Med. Phys. 2010, 37, 5482–5493. [Google Scholar] [CrossRef] [PubMed]
- Jeon, S.; Lee, C.O. A CT metal artifact reduction algorithm based on sinogram surgery. J. X-ray Sci. Technol. 2018, 26, 413–434. [Google Scholar] [CrossRef] [PubMed]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. ImageNet Classification with Deep Convolutional Neural Networks. Adv. Neural Inf. Process. Syst. 2012, 25, 1097–1105. [Google Scholar] [CrossRef]
- Simonyan, K.; Zisserman, A. Very Deep Convolutional Networks for Large-Scale Image Recognition. arXiv 2014, arXiv:1409.1556. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Ge, W. A Perspective on Deep Imaging. IEEE Access 2017, 4, 8914–8924. [Google Scholar]
- Gjesteby, L.; Yang, Q.; Yan, X.; Claus, B.; Shan, H. Deep learning methods for CT image-domain metal artifact reduction. In Proceedings of the SPIE Conference on Developments in X-Ray Tomography XI, San Diego, CA, USA, 8–10 August 2017. [Google Scholar]
- Zhang, Y.; Yu, H. Convolutional Neural Network Based Metal Artifact Reduction in X-Ray Computed Tomography. IEEE Trans. Med. Imaging 2018, 37, 1370–1381. [Google Scholar] [CrossRef] [PubMed]
- Gjesteby, L.; Shan, H.; Yang, Q.; Xi, Y.; Jin, Y.; Giantsoudi, D.; Paganetti, H.; De Man, B.; Wang, G. A dual-stream deep convolutional network for reducing metal streak artifacts in CT images. Phys. Med. Biol. 2019, 64, 235003. [Google Scholar] [CrossRef]
- Liao, H.; Lin, W.A.; Zhou, S.K.; Luo, J. ADN: Artifact Disentanglement Network for Unsupervised Metal Artifact Reduction. IEEE Trans. Med. Imaging 2020, 39, 634–643. [Google Scholar] [CrossRef] [Green Version]
- Claus, B.; Jin, Y.; Gjesteby, L.; Wang, G.; Man, B.D. Metal artifact reduction using deep-learning based sinogram completion: Initial results. In Proceedings of the 14th International Conference on Fully Three-Dimensional Image Reconstruction in Radiology and Nuclear Medicine, Xi’an, China, 18–23 June 2017. [Google Scholar]
- Park, H.S.; Lee, S.M.; Kim, H.P.; Seo, J.K.; Chung, Y.E. CT sinogram-consistency learning for metal-induced beam hardening correction. Med. Phys. 2018, 45, 5376–5384. [Google Scholar] [CrossRef] [Green Version]
- Ronneberger, O.; Fischer, P.; Brox, T. U-Net: Convolutional Networks for Biomedical Image Segmentation. In Proceedings of the International Conference on Medical Image Computing and Computer-Assisted Intervention, Munich, Germany, 5–9 October 2015; pp. 234–241. [Google Scholar]
- Wang, Z.; Vandersteen, C.; Demarcy, T.; Gnansia, D.; Raffaelli, C.; Guevara, N.; Delingette, H. Deep Learning based Metal Artifacts Reduction in post-operative Cochlear Implant CT Imaging. In Proceedings of the International Conference on Medical Image Computing and Computer-Assisted Intervention, Shenzhen, China, 13–17 October 2019; pp. 121–129. [Google Scholar]
- Wang, J.; Zhao, Y.; Noble, J.H.; Dawant, B. Conditional Generative Adversarial Networks for Metal Artifact Reduction in CT Images of the Ear. In Proceedings of the Medical Image Computing Computer-Assisted Intervention, Granada, Spain, 16–20 September 2018. [Google Scholar]
- Ghani, M.U.; Karl, W.C. Fast Enhanced CT Metal Artifact Reduction Using Data Domain Deep Learning. IEEE Trans. Comput. Imaging 2020, 6, 181–193. [Google Scholar] [CrossRef] [Green Version]
- Liu, G.; Reda, F.A.; Shih, K.J.; Wang, T.-C.; Tao, A.; Catanzaro, B. Image Inpainting for Irregular Holes Using Partial Convolutions. In Proceedings of the Computer Vision—ECCV 2018, Munich, Germany, 8–14 September 2018; pp. 89–105. [Google Scholar]
- Pimkin, A.; Samoylenko, A.; Antipina, N.; Ovechkina, A.; Golanov, A.; Dalechina, A.; Belyaev, M. Multidomain CT Metal Artifacts Reduction Using Partial Convolution Based Inpainting. In Proceedings of the 2020 International Joint Conference on Neural Networks (IJCNN), Glasgow, UK, 19–24 July 2020; pp. 1–6. [Google Scholar]
- Yuan, L.; Huang, Y.; Maier, A. Projection Inpainting Using Partial Convolution for Metal Artifact Reduction. arXiv 2020, arXiv:2005.00762. [Google Scholar]
- Csáji, B.C. Approximation with Artificial Neural Networks. Master’s Thesis, Etvs Lornd University, Budapest, Hungary, 2001. [Google Scholar]
- Jing, W.; Tianfang, L.; Hongbing, L.; Zhengrong, L. Penalized weighted least-squares approach to sinogram noise reduction and image reconstruction for low-dose X-ray computed tomography. IEEE Trans. Med. Imaging 2006, 25, 1272–1283. [Google Scholar] [CrossRef]
- Natterer, F.; Wang, G. Books and Publications: The Mathematics of Computerized Tomography. Med. Phys. 2002, 29, 107–108. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| (c). LI | (d). FCN | (e). U-Net | (f). Proposed | |
|---|---|---|---|---|
| Pleural | 28.2126 | 37.9773 | 40.6941 | 16.8108 |
| Cranial | 21.8383 | 22.0243 | 35.8966 | 11.9921 |
| (c). LI | (d). FCN | (e). U-Net | (f). Proposed | |||
|---|---|---|---|---|---|---|
| NMAD | Pleural | CT | 0.1164 | 0.0995 | 0.0978 | 0.0724 |
| ROIs | 0.1084 | 0.0930 | 0.0951 | 0.0699 | ||
| Cranial | CT | 0.1216 | 0.1106 | 0.1066 | 0.0713 | |
| ROIs | 0.1150 | 0.1124 | 0.1064 | 0.0646 | ||
| RMSE | Pleural | CT | 8.2725 | 7.1038 | 7.0616 | 5.2356 |
| ROIs | 12.6553 | 10.8224 | 11.4806 | 8.2140 | ||
| Cranial | CT | 7.6252 | 6.3194 | 6.3905 | 4.3367 | |
| ROIs | 12.4006 | 12.0947 | 12.8702 | 7.5756 | ||
| (c). LI | (d). FCN | (e). U-Net | (f). Proposed | |
|---|---|---|---|---|
| Case 1 | 0.9881 | 0.8940 | 0.7298 | 0.3947 |
| Case 2 | 0.5385 | 0.4637 | 0.4320 | 0.2156 |
| (c). LI | (d). FCN | (e). U-Net | (f). Proposed | |||
|---|---|---|---|---|---|---|
| NMAD | Case 1 | CT | 0.1050 | 0.0816 | 0.0787 | 0.0522 |
| ROIs | 0.0967 | 0.0891 | 0.0790 | 0.0480 | ||
| Case 2 | CT | 0.0841 | 0.0847 | 0.0757 | 0.0485 | |
| ROIs | 0.0844 | 0.0886 | 0.0809 | 0.0509 | ||
| RMSE | Case 1 | CT | 0.0616 | 0.0519 | 0.0492 | 0.0319 |
| ROIs | 0.0854 | 0.0865 | 0.0742 | 0.0483 | ||
| Case 2 | CT | 0.0428 | 0.0397 | 0.0398 | 0.0266 | |
| ROIs | 0.0728 | 0.0711 | 0.0674 | 0.0431 | ||
| (c). U-Net | (d). U-Net Added Metal Mask | (e). U-Net Added Feature Loss | (f). Proposed | |||
|---|---|---|---|---|---|---|
| NMAD | Simulation results | CT | 0.0978 | 0.0925 | 0.0859 | 0.0724 |
| ROIs | 0.0951 | 0.0903 | 0.0838 | 0.0699 | ||
| Actual results | CT | 0.0757 | 0.0586 | 0.0569 | 0.0485 | |
| ROIs | 0.0809 | 0.0589 | 0.0588 | 0.0509 | ||
| RMSE | Simulation results | CT | 7.0616 | 6.7823 | 6.1976 | 5.2356 |
| ROIs | 11.4806 | 11.0051 | 9.8988 | 8.2140 | ||
| Actual results | CT | 0.0397 | 0.0329 | 0.0330 | 0.0266 | |
| ROIs | 0.0674 | 0.0535 | 0.0520 | 0.0431 | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, L.; Han, Y.; Xi, X.; Li, L.; Yan, B. Completion of Metal-Damaged Traces Based on Deep Learning in Sinogram Domain for Metal Artifacts Reduction in CT Images. Sensors 2021, 21, 8164. https://doi.org/10.3390/s21248164
Zhu L, Han Y, Xi X, Li L, Yan B. Completion of Metal-Damaged Traces Based on Deep Learning in Sinogram Domain for Metal Artifacts Reduction in CT Images. Sensors. 2021; 21(24):8164. https://doi.org/10.3390/s21248164
Chicago/Turabian StyleZhu, Linlin, Yu Han, Xiaoqi Xi, Lei Li, and Bin Yan. 2021. "Completion of Metal-Damaged Traces Based on Deep Learning in Sinogram Domain for Metal Artifacts Reduction in CT Images" Sensors 21, no. 24: 8164. https://doi.org/10.3390/s21248164
APA StyleZhu, L., Han, Y., Xi, X., Li, L., & Yan, B. (2021). Completion of Metal-Damaged Traces Based on Deep Learning in Sinogram Domain for Metal Artifacts Reduction in CT Images. Sensors, 21(24), 8164. https://doi.org/10.3390/s21248164