
Measuring Upper Limb Kinematics of Forehand and Backhand Topspin Drives with IMU Sensors in Wheelchair and Able-Bodied Table Tennis Players




Abstract
:1. Introduction
2. Materials and Methods
2.1. Participants
2.2. Gycroscopic 3DSuit Inertial Motion Capture System
2.3. Table Tennis Equipment
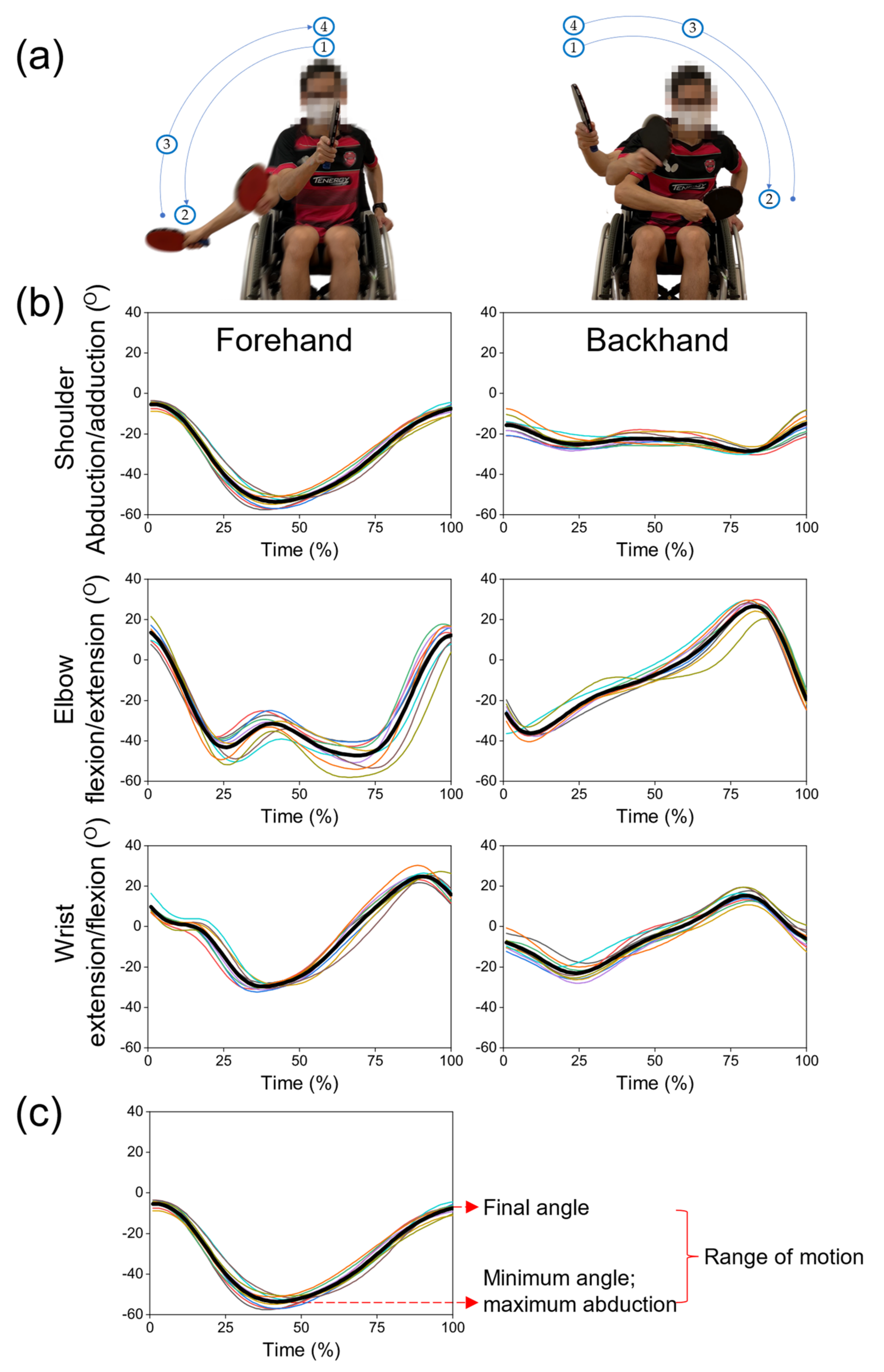
2.4. Experimental Protocol
2.5. Data Processing
2.5.1. Filtering Raw Data
2.5.2. Extracting Key Variables
- Minimum angle—the minimum angle for shoulder, elbow, and wrist joints is maximum shoulder abduction, elbow flexion, and wrist extension, respectively;
- Final angle—the angle at the end of the follow-through phase of each drive;
- Range of motion (ROM)—t he excursion from minimum to final angles of each drive.
3. Results
3.1. Forehand Topspin Drives
3.2. Backhand Topspin Drives
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- ITTF. Classification Rules for ITTF Para Table Tennis: Rules Consistent with the 2015 IPC Athlete Classification Code and Accompanying International Standards. 2018. Available online: https://www.ipttc.org/classification/Rules/ITTFPTT%20Classification%20Rules%202018.pdf (accessed on 29 October 2021).
- Zhang, H.; Liu, W.; Hu, J.J.; Liu, R.Z. Evaluation of elite table tennis players’ technique effectiveness. J. Sports Sci. 2013, 31, 1526–1534. [Google Scholar] [CrossRef] [PubMed]
- Ivanek, V.; Đukić, B.; Mikić, B.; Smajic, M.; Doder, D. Effects of technical and tactical characteristics on the performance of the table tennis players. FU Phys. Educ. Sport 2018, 16, 157. [Google Scholar] [CrossRef]
- Wang, M.Y.; Liu, Y.C.; Chen, C.J. Techniques and Tactics Analysis Related to Personality in Table Tennis Doubles. In Proceedings of the 13th ITTF Sports Science Congress, Paris, France, 11–12 May 2013. [Google Scholar]
- Rodrigues, S.T.; Vickers, J.N.; Williams, A.M. Head, eye and arm coordination in table tennis. J. Sports Sci. 2002, 20, 187–200. [Google Scholar] [CrossRef]
- Shum, H.; Komura, T. Tracking the Translational and Rotational Movement of the Ball Using High-Speed Camera Movies. In Proceedings of the 2005 International Conference on Image Processing, Genoa, Italy, 11–14 September 2005. [Google Scholar]
- Rusdorf, S.; Brunnett, G. Real Time Tracking of High Speed Movements in the Context of a Table Tennis Application. In Proceedings of the ACM Symposium on Virtual Reality Software and Technology, Monterey, CA, USA, 7–9 November 2005. [Google Scholar]
- Wagner, J.F. About motion measurement in sports based on gyroscopes and accelerometers—An engineering point of view. Gyroscopy Navig. 2018, 9, 1–18. [Google Scholar] [CrossRef]
- Blank, P.; Hoßbach, J.; Schuldhaus, D.; Eskofier, B.M. Sensor-Based Stroke Detection and Stroke Type Classification in Table Tennis. In Proceedings of the 2015 ACM International Symposium on Wearable Computers, Osaka, Japan, 9–11 September 2015; pp. 93–100. [Google Scholar]
- Tabrizi, S.S.; Pashazadeh, S.; Javani, V. Data acquired by a single object sensor for the detection and quality evaluation of table tennis forehand strokes. Data Brief 2020, 33, 106504. [Google Scholar] [CrossRef] [PubMed]
- Blank, P.; Groh, B.H.; Eskofier, B.M. Ball Speed and Spin Estimation in Table Tennis Using a Racket-Mounted Inertial Sensor. In Proceedings of the 2017 ACM International Symposium on Wearable Computers, Maui, HI, USA, 11–15 September 2017; Association for Computing Machinery: New York, NY, USA, 2017; pp. 2–9. [Google Scholar]
- Nonaka, Y.; Irie, K.; Ando, S.; Yamada, Y. Application of IMU-Based Motion Measurement Methods to Table Tennis Coaching. In Proceedings of the Symposium on Sports and Human Dynamics, Tokyo, Japan, 25–28 June 2018; Japan Society of Mechanical Engineers: Tokyo, Japan, 2018. [Google Scholar]
- Bańkosz, Z.; Winiarski, S. Using wearable inertial sensors to estimate kinematic parameters and variability in the table tennis topspin forehand stroke. Appl. Bionics Biomech. 2020, 2020, 8413948. [Google Scholar] [CrossRef] [PubMed]
- Wang, H.; Li, L.; Chen, H.; Li, Y.; Qiu, S.; Gravina, R. Motion Recognition for Smart Sports Based on Wearable Inertial Sensors. In Proceedings of the Lecture Notes of the Institute for Computer Sciences, Social Informatics and Telecommunications Engineering, Florence, Italy, 2–3 October 2019; Springer: Cham, Switzerland, 2019; pp. 114–124. [Google Scholar]
- Yin, C. Application of Accelerometer in Table Tennis Action Recognition. In Proceedings of the 5th International Conference on Electrical and Electronics Engineering and Computer Science, Beijing, China, 29–30 June 2018. [Google Scholar]
- Dokic, K.; Mesic, T.; Martinovic, M. Table Tennis Forehand and Backhand Stroke Recognition Based on Neural Network. In Proceedings of the Communicational Conference on Advances in Computinger and Information Science, Valletta, Malta, 24–25 April 2020; Springer: Singapore, 2020; pp. 24–35. [Google Scholar]
- Fu, Z.; Shu, K.-I.; Zhang, H. Ping Pong Motion Recognition Based on Smart Watch. In Proceedings of the 3rd International Conference on Mechatronics Engineering and Information Technology, Dalian, China, 29–30 March 2019; Atliantis Press: Beijing, China, 2019. [Google Scholar]
- Liu, R.; Wang, Z.; Shi, X.; Zhao, H.; Qiu, S.; Li, J.; Yang, N. Table Tennis Stroke Recognition Based on Body Sensor Network. In Proceedings of the International Conference on Internet and Distributed Computing Systems, Naples, Italy, 10–12 October 2019; Springer: Cham, Switzerland, 2019; pp. 1–10. [Google Scholar]
- Zhang, H.; Fu, Z.; Shu, K.-I. Recognizing ping-pong motions using inertial data based on machine learning classification algorithms. IEEE Access 2019, 7, 167055–167064. [Google Scholar] [CrossRef]
- Lim, S.-M.; Oh, H.-C.; Kim, J.; Lee, J.; Park, J. LSTM-guided coaching assistant for table tennis practice. Sensors 2018, 18, 4112. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sharma, M.; Anand, A.; Srivastava, R.; Kaligounder, L. Wearable audio and IMU based shot detection in racquet sports. arXiv 2018, arXiv:1805.05456. [Google Scholar]
- Faber, I.; Pion, J.; Willemse, B.; Schipper, W.; Nijhuis-Van, M. Is the level of eye-hand coordination and executive functioning related to performance in para table tennis players?—An explorative study. IJRSS 2019, 1, 45–60. [Google Scholar]
- Lim, D.; Yap, W.B.; Tan, Z.; Li, H.; Teng, P. A Case Study of Para Table Tennis Athlete’s Functional Ability. In Proceedings of the 3rd International Congress on Sport Sciences Research and Technology Support, Lisbon, Portugal, 15–17 November 2015; Science and Technology Publications: Setúbal, Portugal, 2015; pp. 169–173. [Google Scholar]
- Tang, S.Q.; Li, K.H.H.; Lim, S.L.D. Design enhancement of overall Paralympics wheelchair for para table tennis competition. J. Sport Eng. Technol. 2019, 233, 342–350. [Google Scholar] [CrossRef]
- Li, K.H.H.; Lim, S.L.; Ozaki, H. Functional Synthesis of Mechanical Improvement of Wheelchair for Paralympians’ Table Tennis Competition. In Proceedings of the 2nd International Conference in Sports Science and Technology, Singapore, 12–13 December 2016; Nanyang Technological University: Singapore, 2016; pp. 191–199. [Google Scholar]
- Zemková, E.; Muyor, J.M.; Jeleň, M. Association of trunk rotational velocity with spine mobility and curvatures in para table tennis players. Int. J. Sports Med. 2018, 39, 1055–1062. [Google Scholar] [CrossRef]
- Van Biesen, D.; Mactavish, J.; McCulloch, K.; Lenaerts, L.; Vanlandewijck, Y.C. Cognitive profile of young well-trained athletes with intellectual disabilities. Res. Dev. Disabil. 2016, 53, 377–390. [Google Scholar] [CrossRef]
- Van Biesen, D.; Mactavish, J.; Kerremans, J.; Vanlandewijck, Y. Cognitive predictors of performance in well-trained table tennis players with intellectual disability. Adapt. Phys. Activ. Q. 2016, 33, 324–337. [Google Scholar] [CrossRef]
- Van Biesen, D.; Mactavish, J.; Pattyn, N.; Vanlandewijck, Y. Technical proficiency among table tennis players with and without intellectual disabilities. Hum. Mov. Sci. 2012, 31, 1517–1528. [Google Scholar] [CrossRef]
- Van Biesen, D.; Mactavish, J.; Vanlandewijck, Y. Tactical proficiency among table tennis players with and without intellectual disabilities. Eur. J. Sport Sci. 2014, 14, 403–409. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Fuchs, M.; Faber, I.; Lames, M. Game characteristics in elite para table tennis. Ger. J. Exerc. Sport Res. 2019, 49, 251–258. [Google Scholar] [CrossRef]
- Caldwell, M.; De Luigi, A.J. Wheelchair tennis and para-table tennis. In Adaptive Sports Medicine: A Clinical Guide; De Luigi, A.J., Ed.; Springer: Berlin/Heidelberg, Germany, 2018; pp. 201–217. [Google Scholar]
- Wong, D.W.; Lee, W.C.; Lam, W. Biomechanics of table tennis: A systematic scoping review of playing levels and maneuvers. Appl. Sci. 2020, 10, 5203. [Google Scholar] [CrossRef]
- Iino, Y.; Kojima, T. Kinetics of the upper limb during table tennis topspin forehands in advanced and intermediate players. Sports Biomech. 2011, 10, 361–377. [Google Scholar] [CrossRef] [PubMed]
- Xia, R.; Dai, B.; Fu, W.; Gu, N.; Wu, Y. Kinematic comparisons of the shakehand and penhold grips in table tennis forehand and backhand strokes when returning topspin and backspin balls. J. Sports Sci. Med. 2020, 19, 637–644. [Google Scholar] [PubMed]
- Bjerkefors, A.; Rosen, J.S.; Tarassova, O.; Arndt, A. Three-dimensional kinematics and power output in elite para-kayakers and elite able-bodied flat-water kayakers. J. Appl. Biomech. 2019, 35, 93–100. [Google Scholar] [CrossRef] [PubMed]
- Gołaś, A.; Zwierzchowska, A.; Maszczyk, A.; Wilk, M.; Stastny, P.; Zając, A. Neuromuscular control during the bench press movement in an elite disabled and able-bodied athlete. J. Hum. Kinet. 2017, 60, 209–215. [Google Scholar] [CrossRef] [Green Version]
- IPC. Explanatory Guide to Paralympic Classification: Paralympic Summer Sports; International Paralympic Committee: Bonn, Germany, 2015; pp. 37–38. [Google Scholar]
- Bankosz, Z.; Winiarski, S. Correlations between angular velocities in selected joints and velocity of table tennis racket during topspin forehand and backhand. J. Sports Sci. Med. 2018, 19, 637–644. [Google Scholar]
- Bankosz, Z.; Winiarski, S. The evaluation of changes in angles in selected joints during topspin forehand in table tennis. Motor Control 2018, 22, 314–337. [Google Scholar] [CrossRef] [PubMed]
- Taylor, J.B.; Santi, G.; Mellalieu, S.D. Freestyle race pacing strategies (400 m) of elite able-bodied swimmers and swimmers with disability at major international championships. J. Sports Sci. 2016, 34, 1913–1920. [Google Scholar] [CrossRef]
- Lam, W.-K.; Fan, J.-X.; Zheng, Y.; Lee, W.C.-C. Joint and plantar loading in table tennis topspin forehand with different footwork. Eur. J. Sport Sci. 2018, 19, 471–479. [Google Scholar] [CrossRef] [PubMed]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Classification | Class 1 | Class 2 | Class 3 | Able-Bodied | |
|---|---|---|---|---|---|
| n | 3 | 3 | 4 | 9 | |
| Age (years) | 52.3 (9.1) | 44.0 (5.6) | 50.3 (17.2) | 23.1 (1.6) | |
| Experience (years) | 3.3 (0.6) | 4.7 (1.5) | 3.0 (1.4) | 13.4 (2.6) | |
| Playing hand | Right-handed | 2 Right-handed 1 Left-handed | Right-handed | Right-handed | |
| Grip style | Shakehand | Shakehand | Shakehand | Shakehand | |
| Racket Type | Front | 2 Inverted 1 Long pimples | 2 Inverted 1 Long pimples | 2 Inverted 2 Mid pimples | Inverted |
| Back | 1 Inverted 2 Long pimples | 2 Inverted 1 Long pimples | 1 Inverted 1 Short pimples 2 Long pimples | 7 Inverted 1 Short pimples 1 Long pimples | |
| Joint | Minimum Angle (°) | Final Angle (°) | ROM (°) | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| C1 | C2 | C3 | AB | C1 | C2 | C3 | AB | C1 | C2 | C3 | AB | |
| Forehand | ||||||||||||
| Shoulder | 32.9 (11.9) | 32.9 (8.7) | 38.4 (5.4) | 48.1 (8.5) | 11.8 (18.7) | 8.2 (5.8) | 15.3 (9.1) | 16.1 (12.7) | 21.1 (6.8) | 24.7 (4.9) | 23.0 (11.2) | 32.0 (15.1) |
| Elbow | 39.2 (9.5) | 37.9 (10.8) | 49.9 (21.7) | 70.3 (24.5) | 35.7 (8.4) | 33.0 (14.9) | 25.3 (43.5) | 12.2 (26.0) | 3.5 (1.2) | 5.0 (4.1) | 24.7 (31.0) | 58.0 (31.8) |
| Wrist | 50.7 (11.1) | 8.4 (19.5) | 16.0 (25.1) | 69.1 (49.0) | 34.6 (7.8) | 14.2 (16.6) | 18.9 (22.6) | 16.6 (17.6) | 16.1 (3.3) | 5.8 (4.3) | 2.9 (2.6) | 52.5 (37.9) |
| Backhand | ||||||||||||
| Shoulder | 17.0 (31.2) | 10.9 (1.1) | 13.7 (13.5) | 54.4 (13.8) | 12.5 (10.7) | 13.0 (14.6) | 2.7 (17.1) | 29.5 (10.9) | 29.6 (39.3) | 23.9 (15.0) | 16.4 (9.4) | 24.9 (15.8) |
| Elbow | 46.5 (16.0) | 34.6 (44.3) | 19.3 (18.8) | 40.8 (11.4) | 34.7 (9.8) | 11.3 (18.8) | 1.3 (27.8) | 28.2 (6.4) | 11.8 (6.2) | 23.2 (25.6) | 18.0 (11.4) | 12.6 (14.1) |
| Wrist | 39.4 (2.1) | 12.8 (13.4) | 6.7 (29.1) | 45.1 (49.7) | 29.1 (5.5) | 10.9 (12.5) | 4.2 (29.1) | 11.7 (20.0) | 10.3 (3.3) | 1.9 (2.0) | 2.5 (1.4) | 33.3 (50.4) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yam, J.-W.; Pan, J.-W.; Kong, P.-W. Measuring Upper Limb Kinematics of Forehand and Backhand Topspin Drives with IMU Sensors in Wheelchair and Able-Bodied Table Tennis Players. Sensors 2021, 21, 8303. https://doi.org/10.3390/s21248303
Yam J-W, Pan J-W, Kong P-W. Measuring Upper Limb Kinematics of Forehand and Backhand Topspin Drives with IMU Sensors in Wheelchair and Able-Bodied Table Tennis Players. Sensors. 2021; 21(24):8303. https://doi.org/10.3390/s21248303
Chicago/Turabian StyleYam, Jia-Wen, Jing-Wen Pan, and Pui-Wah Kong. 2021. "Measuring Upper Limb Kinematics of Forehand and Backhand Topspin Drives with IMU Sensors in Wheelchair and Able-Bodied Table Tennis Players" Sensors 21, no. 24: 8303. https://doi.org/10.3390/s21248303
APA StyleYam, J.-W., Pan, J.-W., & Kong, P.-W. (2021). Measuring Upper Limb Kinematics of Forehand and Backhand Topspin Drives with IMU Sensors in Wheelchair and Able-Bodied Table Tennis Players. Sensors, 21(24), 8303. https://doi.org/10.3390/s21248303