
Design and Control of an Adaptive Knee Joint Exoskeleton Mechanism with Buffering Function


Abstract
:1. Introduction
- (1)
- A cross-configuration structure was designed to adapt to the change of the instantaneous center, with the ability to be adapted for a wide range of people.
- (2)
- A structure with a buffering function was designed to absorb impact when walking, which can bear the weight of the mechanism and reduce its complexity.
- (3)
- An adaptive controller was designed to compensate for the uncertainty and external disturbances of the model.
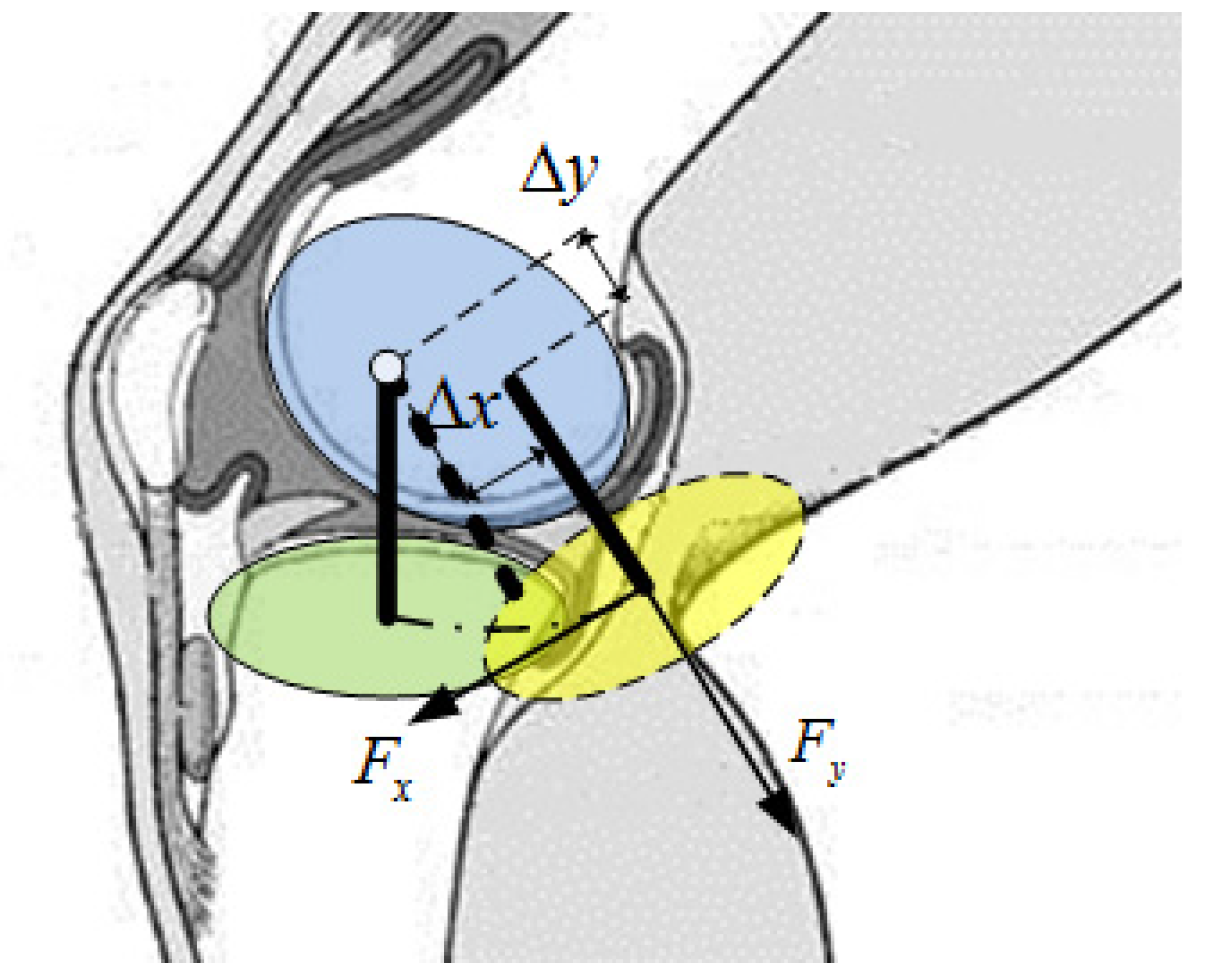
2. Physiological Characteristics of the Knee Joint
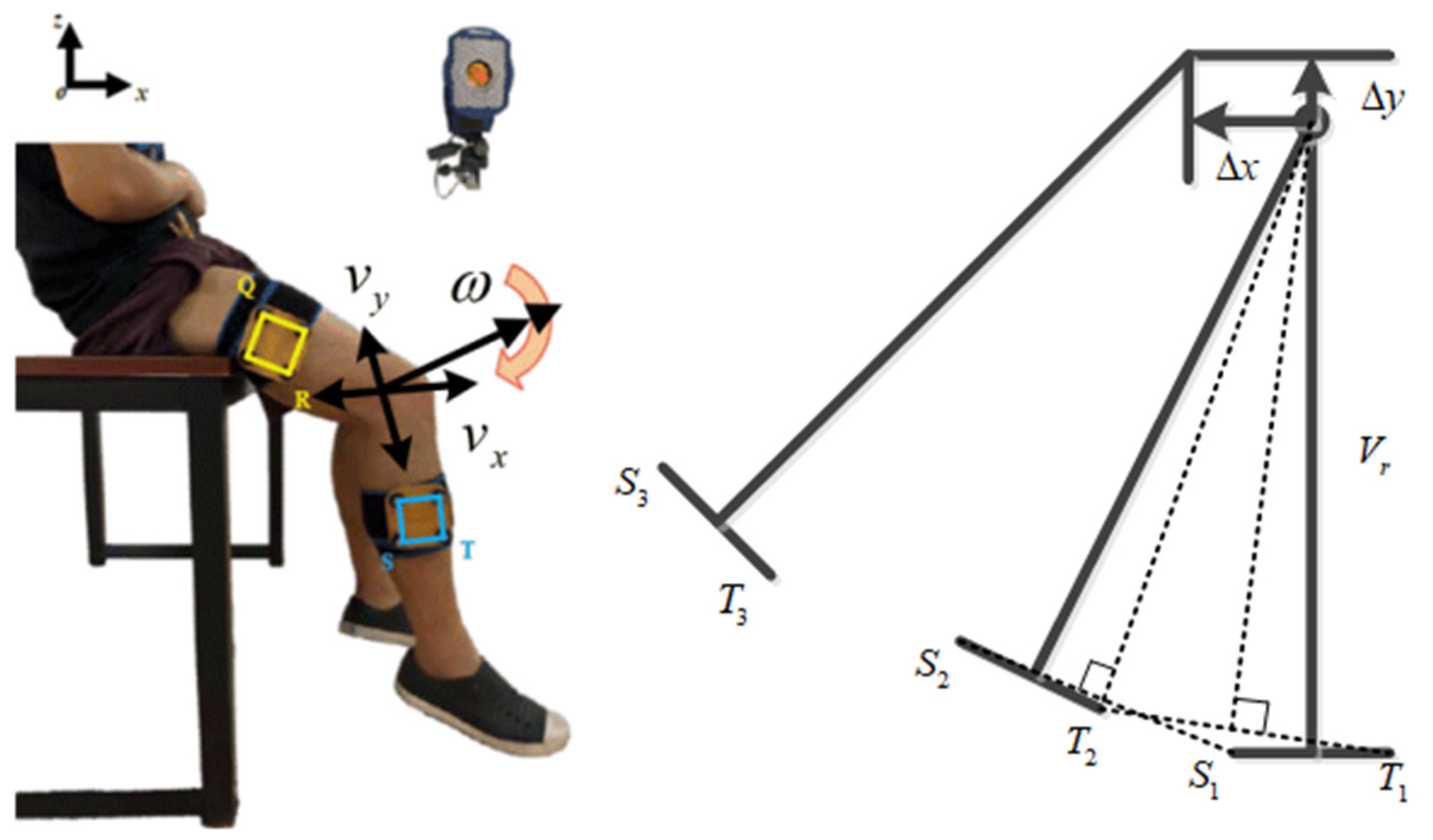
2.1. Leg Translation Measurement
2.2. Impact Force Experiment and Stiffness Fitting
3. Design of the Knee Joint Mechanism
3.1. Cross-Configuration Design
3.2. Design of the Vertical Butler Part
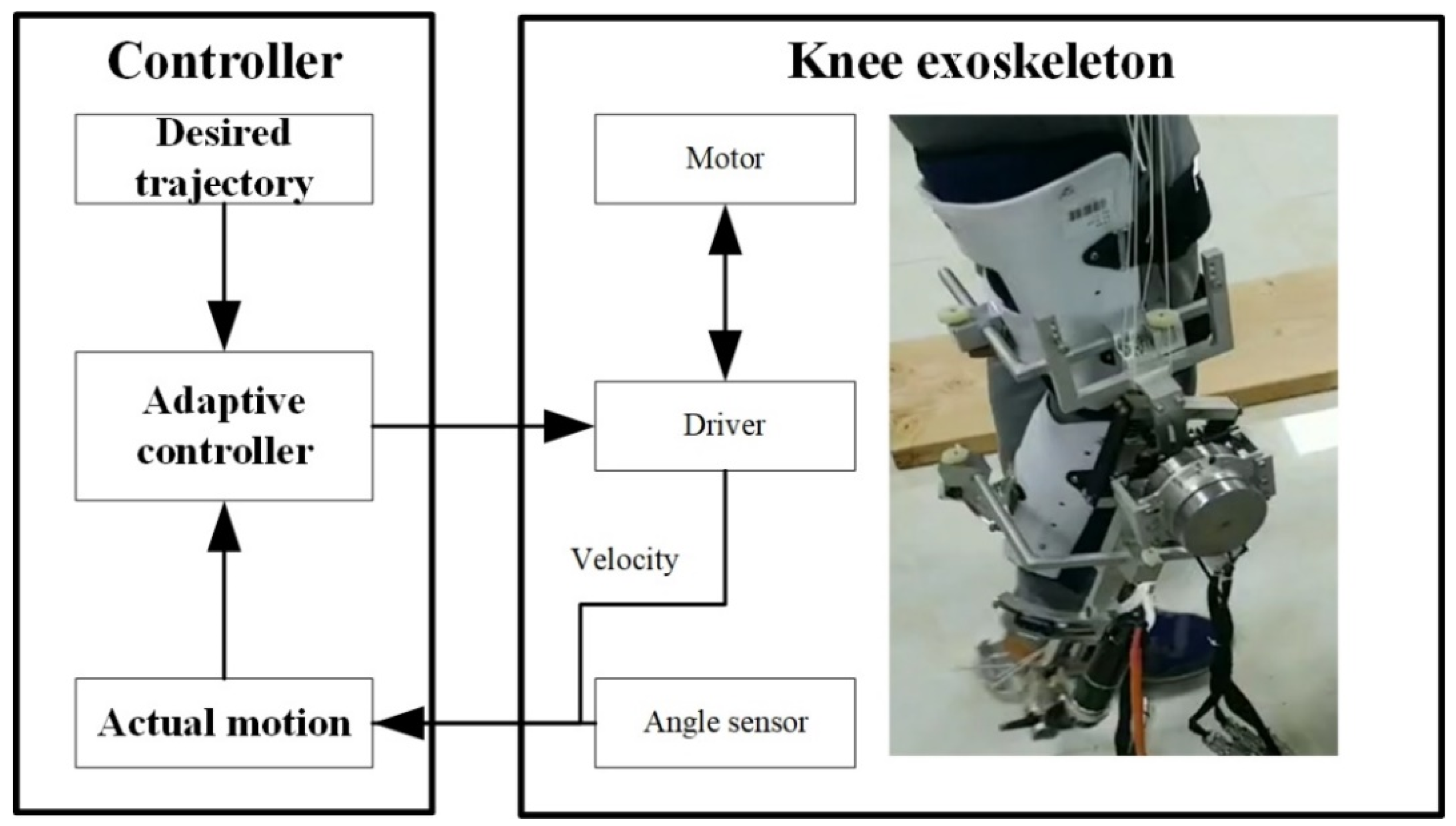
4. Adaptive Controller Design
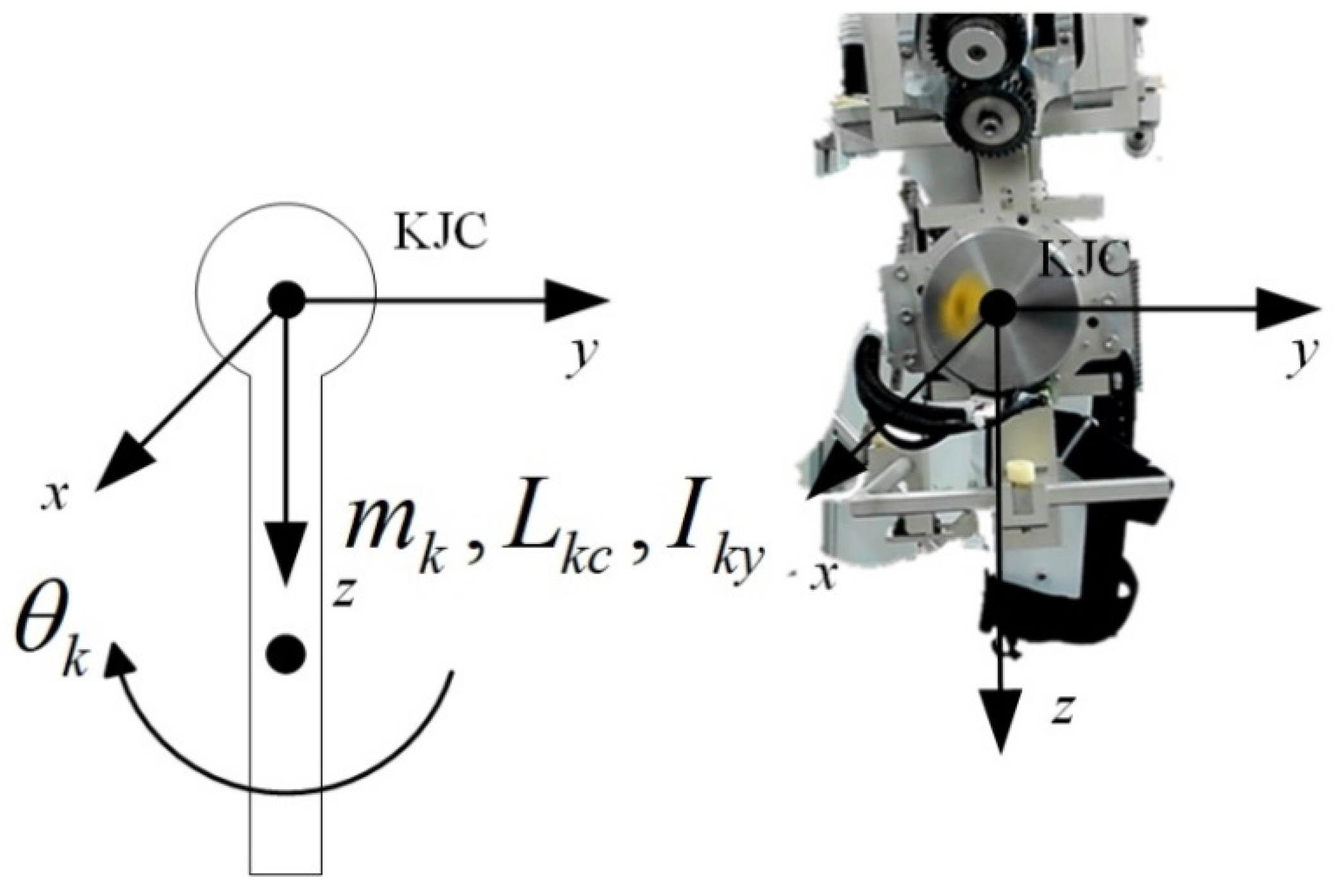
4.1. State Space Model
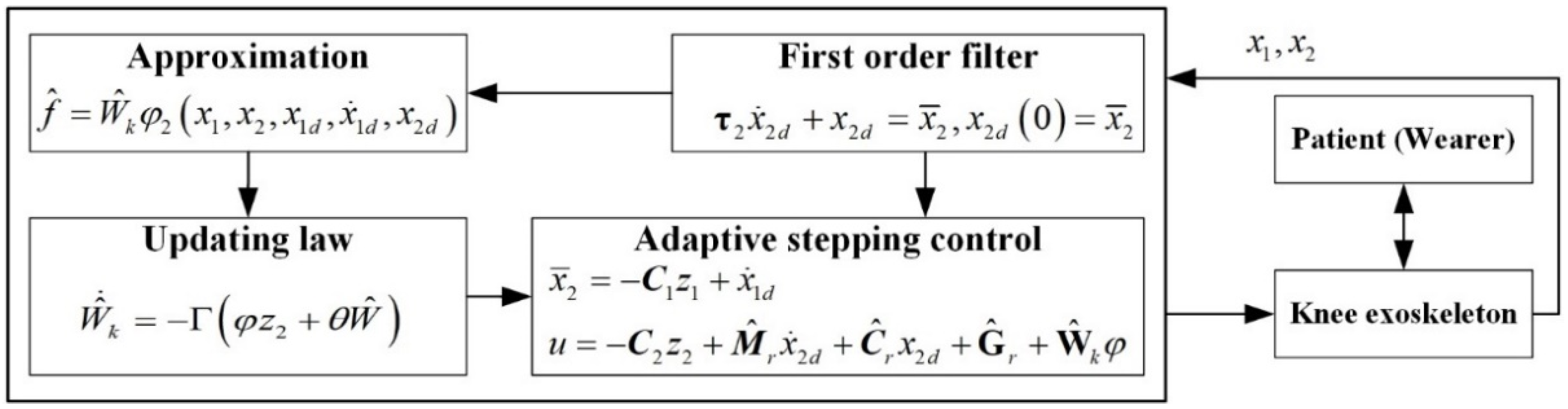
4.2. Adaptive Controller Design
5. Simulation and Experiment
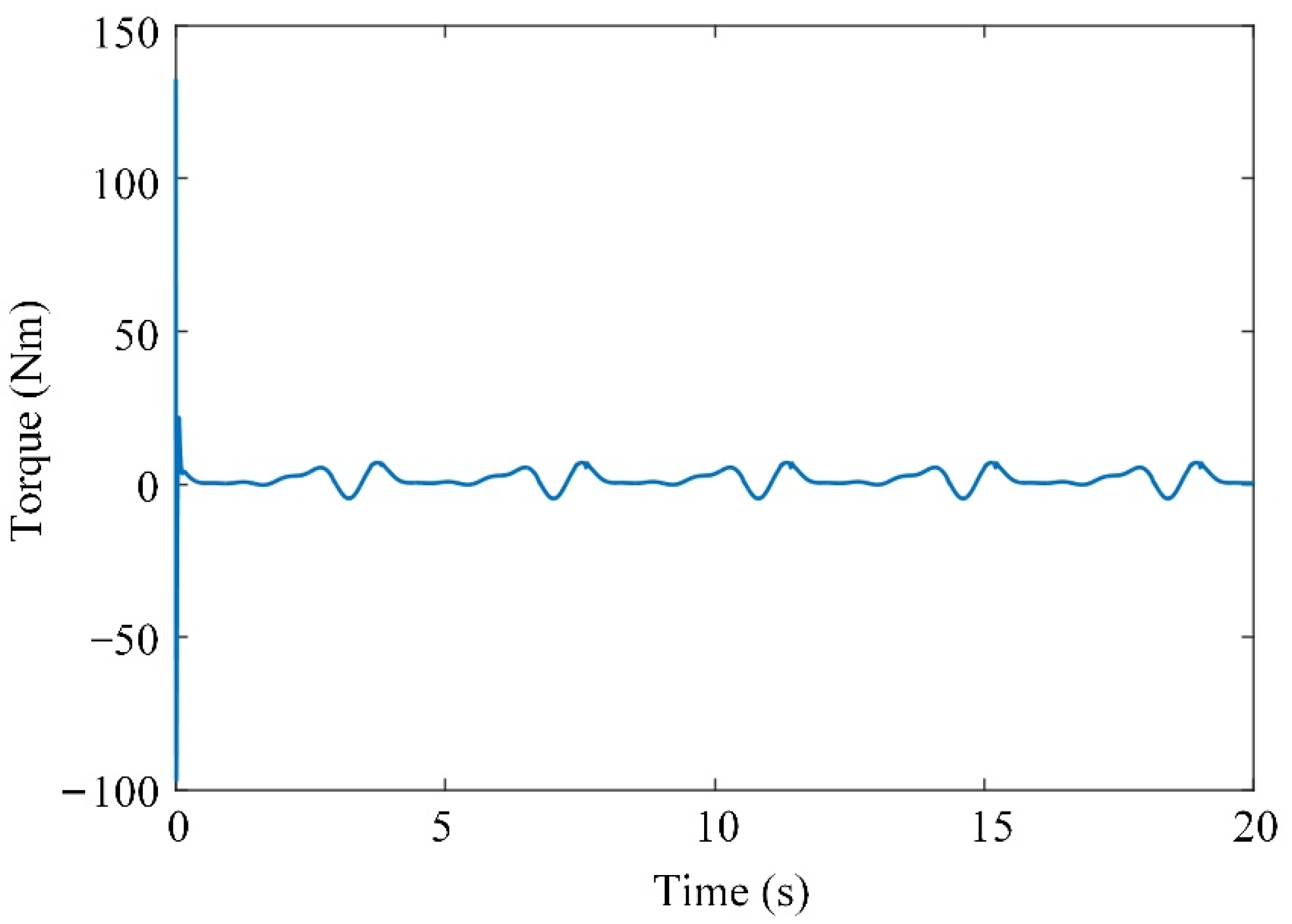
5.1. Simulation and Results
5.2. Experimental Results
5.3. Limitations
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Shepherd, M.; Rouse, E. Design and Validation of a Torque-Controllable Knee Exoskeleton for Sit-to-Stand Assistance. IEEE/ASME Trans. Mechatron. 2017, 22, 1695–1704. [Google Scholar] [CrossRef]
- Andrysek, J.; Tomasi, J.; Leineweber, M.; Eshraghi, A. A New Modeling Method to Characterize the Stance Control Function of Prosthetic Knee Joints. IEEE Ttans Biomed. Eng. 2019, 66, 1184–1192. [Google Scholar] [CrossRef]
- Chen, B.; Zi, B.; Wang, Z.; Qin, L.; Liao, W.H. Knee exoskeletons for gait rehabilitation and human performance augmentation: A state-of-the-art. Mech. Mach. Theory 2019, 134, 499–511. [Google Scholar] [CrossRef]
- Regalbuto, M.A.; Rovick, J.S.; Walker, P.S. The forces in a knee brace as a function of hinge design and placement. Am. J. Sports Med. 1989, 17, 535–543. [Google Scholar] [CrossRef] [PubMed]
- Cullell, A.; Moreno, J.C.; Rocon, E.; Forner-Cordero, A.; Pons, J.L. Biologically based design of an actuator system for a knee–ankle–foot orthosis. Mech. Mach. Theory 2009, 44, 860–872. [Google Scholar] [CrossRef]
- Wang, D.; Lee, K.; Guo, J.; Yang, C. Adaptive knee joint exoskeleton based on biological geometries. IEEE/ASME Trans. Mechatron. 2014, 19, 1268–1278. [Google Scholar] [CrossRef]
- Endo, K.; Paluska, D.; Herr, H. A quasi-passive model of human leg function in level-ground walking. In Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems, Beijing, China, 9–15 October 2006; IEEE: Piscataway, NJ, USA, 2006; pp. 4935–4939. [Google Scholar]
- Piña-Martínez, E.; Rodriguez-Leal, E. Inverse modeling of human knee joint based on geometry and vision systems for exoskeleton applications. Math. Probl. Eng. 2015, 2015, 145734. [Google Scholar] [CrossRef]
- Hyun, D.J.; Park, H.; Ha, T.; Park, S.; Jung, K. Biomechanical design of an agile, electricity-powered lower-limb exoskeleton for weight-bearing assistance. Robot. Auton. Syst. 2017, 95, 181–195. [Google Scholar] [CrossRef]
- Singh, R.; Chaudhary, H.; Singh, A.K. Defect-free optimal synthesis of crank-rocker linkage using nature-inspired optimization algorithms. Mech. Mach. Theory 2017, 116, 105–122. [Google Scholar] [CrossRef]
- Eschbach, M.; Huber, M.; Ilies, H.; Kazerounian, K. Customizable Joint Mechanism for Knee Orthosis. In Proceedings of the International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Buffalo, NY, USA, 17–20 August 2014; American Society of Mechanical Engineers: New York, NY, USA, 2014; pp. V5A–V8A. [Google Scholar]
- Kuan, J.; Pasch, K.A.; Herr, H.M. Design of a knee joint mechanism that adapts to individual physiology. In Proceedings of the 2014 36th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Chicago, IL, USA, 26–30 August 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 2061–2064. [Google Scholar]
- Pratt, J.E.; Krupp, B.T.; Morse, C.J.; Collins, S.H. The RoboKnee: An exoskeleton for enhancing strength and endurance during walking. In Proceedings of the IEEE International Conference on Robotics and Automation, New Orleans, LA, USA, 26 April–1 May 2004; IEEE: Piscataway, NJ, USA, 2004; Volume 3, pp. 2430–2435. [Google Scholar]
- Dollar, A.M.; Herr, H. Design of a quasi-passive knee exoskeleton to assist running. In Proceedings of the 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems, Nice, France, 22–26 September 2008; IEEE: Piscataway, NJ, USA, 2008; pp. 747–754. [Google Scholar]
- Celebi, B.; Yalcin, M.; Patoglu, V. AssistOn-Knee: A self-aligning knee exoskeleton. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 996–1002. [Google Scholar]
- Veneman, J.F.; Kruidhof, R.; Hekman, E.E.; Ekkelenkamp, R.; Van Asseldonk, E.H.; Van Der Kooij, H. Design and evaluation of the LOPES exoskeleton robot for interactive gait rehabilitation. IEEE Trans. Neural Syst. Rehabil. Eng. 2007, 15, 379–386. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Karavas, N.; Ajoudani, A.; Tsagarakis, N.; Saglia, J.; Bicchi, A.; Caldwell, D. Tele-impedance based assistive control for a compliant knee exoskeleton. Robot. Auton. Syst. 2015, 73, 78–90. [Google Scholar] [CrossRef]
- Shamaei, K.; Dollar, A.M. On the mechanics of the knee during the stance phase of the gait. In Proceedings of the 2011 IEEE International Conference on Rehabilitation Robotics, Zurich, Switzerland, 29 June–1 July 2011; IEEE: Piscataway, NJ, USA, 2011; pp. 1–7. [Google Scholar]
- Stienen, A.H.; Hekman, E.E.; Ter Braak, H.; Aalsma, A.M.; Van Der Helm, F.C.; Van Der Kooij, H. Design of a rotational hydroelastic actuator for a powered exoskeleton for upper limb rehabilitation. IEEE Trans. Biomed. Eng. 2009, 57, 728–735. [Google Scholar] [CrossRef]
- Carpino, G.; Accoto, D.; Sergi, F.; Tagliamonte, N.L.; Guglielmelli, E. A novel compact torsional spring for series elastic actuators for assistive wearable robots. J. Mech. Des. 2012, 134, 121002. [Google Scholar] [CrossRef]
- Kim, Y.; Lee, J.; Park, J. Compliant joint actuator with dual spiral springs. IEEE/ASME Trans. Mechatron. 2013, 18, 1839–1844. [Google Scholar] [CrossRef]
- Negrello, F.; Catalano, M.G.; Garabini, M.; Poggiani, M.; Caldwell, D.G.; Tsagarakis, N.G.; Bicchi, A. Design and characterization of a novel high-compliance spring for robots with soft joints. Proceedinsg of the 2017 IEEE International Conference on Advanced Intelligent Mechatronics (AIM), Munich, Germany, 3–7 July 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 271–278. [Google Scholar]
- Huang, C.; Chen, W.; Liu, J.; Zhang, J. Design of a compliant joint actuator for lower-limb exoskeleton robot. In Proceedings of the 2017 12th IEEE Conference on Industrial Electronics and Applications (ICIEA), Siem Reap, Cambodia, 18–20 June 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1522–1527. [Google Scholar]
- Irmscher, C.; Woschke, E.; May, E.; Daniel, C. Design, optimisation and testing of a compact, inexpensive elastic element for series elastic actuators. Med. Eng. Phys. 2018, 52, 84–89. [Google Scholar] [CrossRef]
- Pena, E.; Calvo, B.; Martinez, M.A.; Doblare, M. A three-dimensional finite element analysis of the combined behavior of ligaments and menisci in the healthy human knee joint. J. Biomech. 2006, 39, 1686–1701. [Google Scholar] [CrossRef]
- Bing, C.; Minzhou, L.; Shaoming, S.; Meiling, W.; Kun, W. Design of energy-saving and vibration damping knee joint of humanoid robot based on bionic principles. Robot 2014, 36, 218–223. [Google Scholar]
- Fei, L.; Fuming, Z.; Ruo-Xiu, D.; Hualong, X. Mechanism design and shock-absorbing performance analysis of prosthesis knee joint with meniscus. Mach. Des. Manuf. 2016, 161–164. [Google Scholar]
- Muscolino, J.E. Kinesiology: The Skeletal System and Muscle Function; Elsevier: Amsterdam, The Netherlands, 2011. [Google Scholar]
- Whittle, M.W. Gait Analysis: An Introduction; Butterworth-Heinemann: Oxford, UK, 2014. [Google Scholar]
- Robinson, D.W. Design and Analysis of Series Elasticity in Closed-Loop Actuator Force Control. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 2000. [Google Scholar]
- Swaroop, D.; Hedrick, J.K.; Yip, P.P.; Gerdes, J.C. Dynamic Surface Control for a Class of Nonlinear Systems. IEEE Trans. Autom. Control 2000, 45, 1893–1899. [Google Scholar] [CrossRef] [Green Version]
- Shi, D.; Zhang, W.; Zhang, W.; Ju, L.; Ding, X. Human-centred adaptive control of lower limb rehabilitation robot based on human–robot interaction dynamic model. Mech. Mach. Theory 2021, 162, 104340. [Google Scholar] [CrossRef]
- Shi, D.; Zhang, W.; Ding, X.; Sun, L. Parametric generation of three-dimensional gait for robot-assisted rehabilitation. Biol. Open 2020, 9, 47332. [Google Scholar] [CrossRef] [PubMed] [Green Version]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Subject A | Subject B | Subject C | |
|---|---|---|---|
| Height (cm) | 175 | 183 | 185 |
| Weight (kg) | 75 | 87 | 70 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Zhang, W.; Shi, D.; Geng, Y. Design and Control of an Adaptive Knee Joint Exoskeleton Mechanism with Buffering Function. Sensors 2021, 21, 8390. https://doi.org/10.3390/s21248390
Wang Y, Zhang W, Shi D, Geng Y. Design and Control of an Adaptive Knee Joint Exoskeleton Mechanism with Buffering Function. Sensors. 2021; 21(24):8390. https://doi.org/10.3390/s21248390
Chicago/Turabian StyleWang, Yapeng, Wei Zhang, Di Shi, and Yunhai Geng. 2021. "Design and Control of an Adaptive Knee Joint Exoskeleton Mechanism with Buffering Function" Sensors 21, no. 24: 8390. https://doi.org/10.3390/s21248390