Collaborative Indoor Positioning Systems: A Systematic Review

 ,
,  ,
,  ,
,  and
and 
Abstract
:1. Introduction
- Systematically collecting and analyzing research works related to CIPSs;
- Identifying and classifying the technologies, techniques, and methods applied;
- Identifying and classifying the computation architectures and infrastructures required for positioning;
- Identifying and describing the types of evaluation performed;
- Analyzing and discussing the results, in order to provide an overview of CIPS, and to uncover trends, challenges, and gaps in this research field.
2. Background
2.1. Indoor Positioning Systems
2.2. Indoor Positioning Technologies
2.3. Indoor Positioning Techniques
2.4. Indoor Positioning Methods
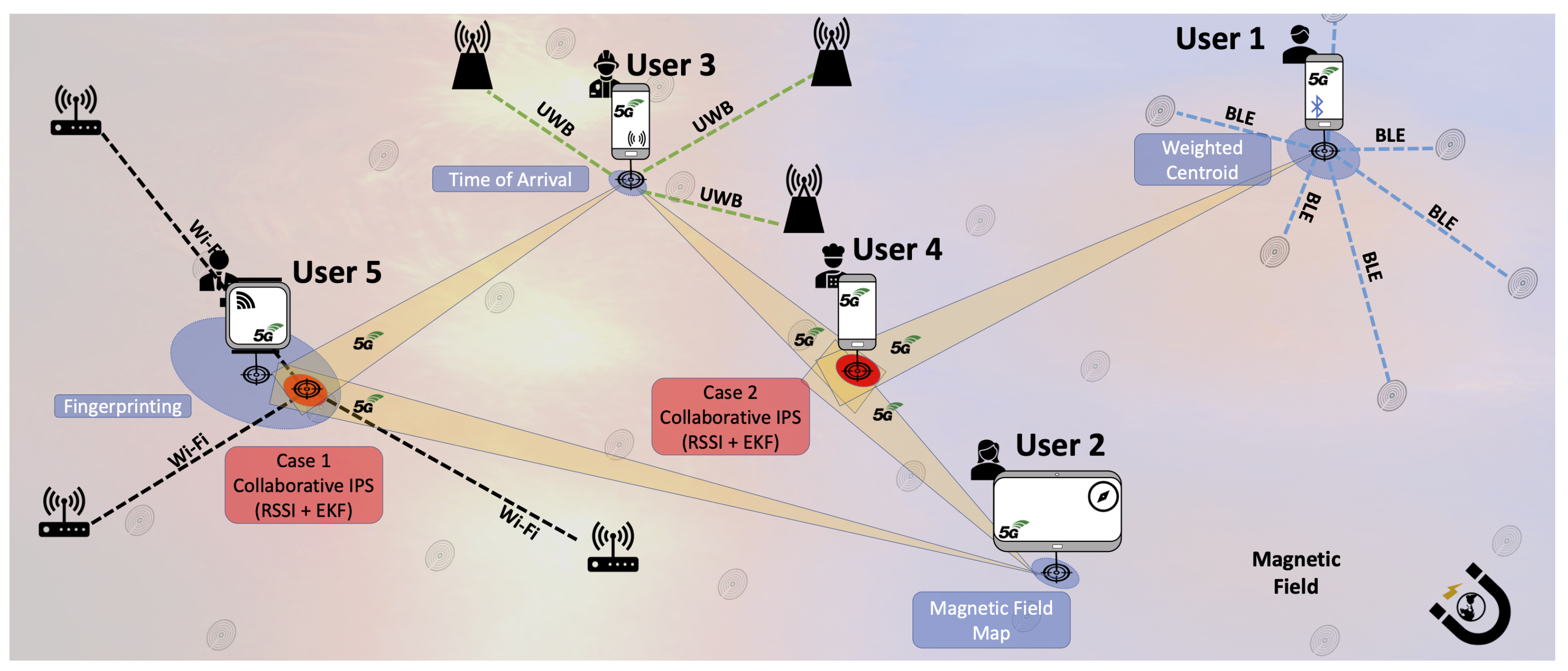
2.5. Collaborative Indoor Positioning Systems
- Case 1 aims to enhance the position accuracy of User 5, which has large uncertainty. The CIPS applies EKF to integrate the ranging information from Users 2 and 3 to estimate a better position.
- Case 2 aims to determine the position of User 4, who is not able to self-determine its position as it is far from the Wi-Fi area. The CIPS applies EKF to integrate the ranging information from Users 1–3 to estimate the position even if the non-collaborative part fails.
3. Research Methodology
3.1. Research Questions
- RQ1: What are the infrastructures, architectures, technologies, techniques, and methods (also called algorithms) used in/for CIPSs?
- RQ2: In which combination are technologies, techniques, and methods used in/for CIPSs?
- RQ3: How have CIPSs been evaluated, and what are the metrics used?
- RQ4: What are the limitations, current trends and gaps, and future research avenues that have been reported?
3.2. Inclusion and Exclusion Criteria
3.2.1. Inclusion Criteria
- IC1: Any full, primary research article written in English and published in a peer-reviewed international journal or conference proceedings.
- IC2: Any article that explicitly presents a Collaborative Indoor Positioning System for human use.
3.2.2. Exclusion Criteria
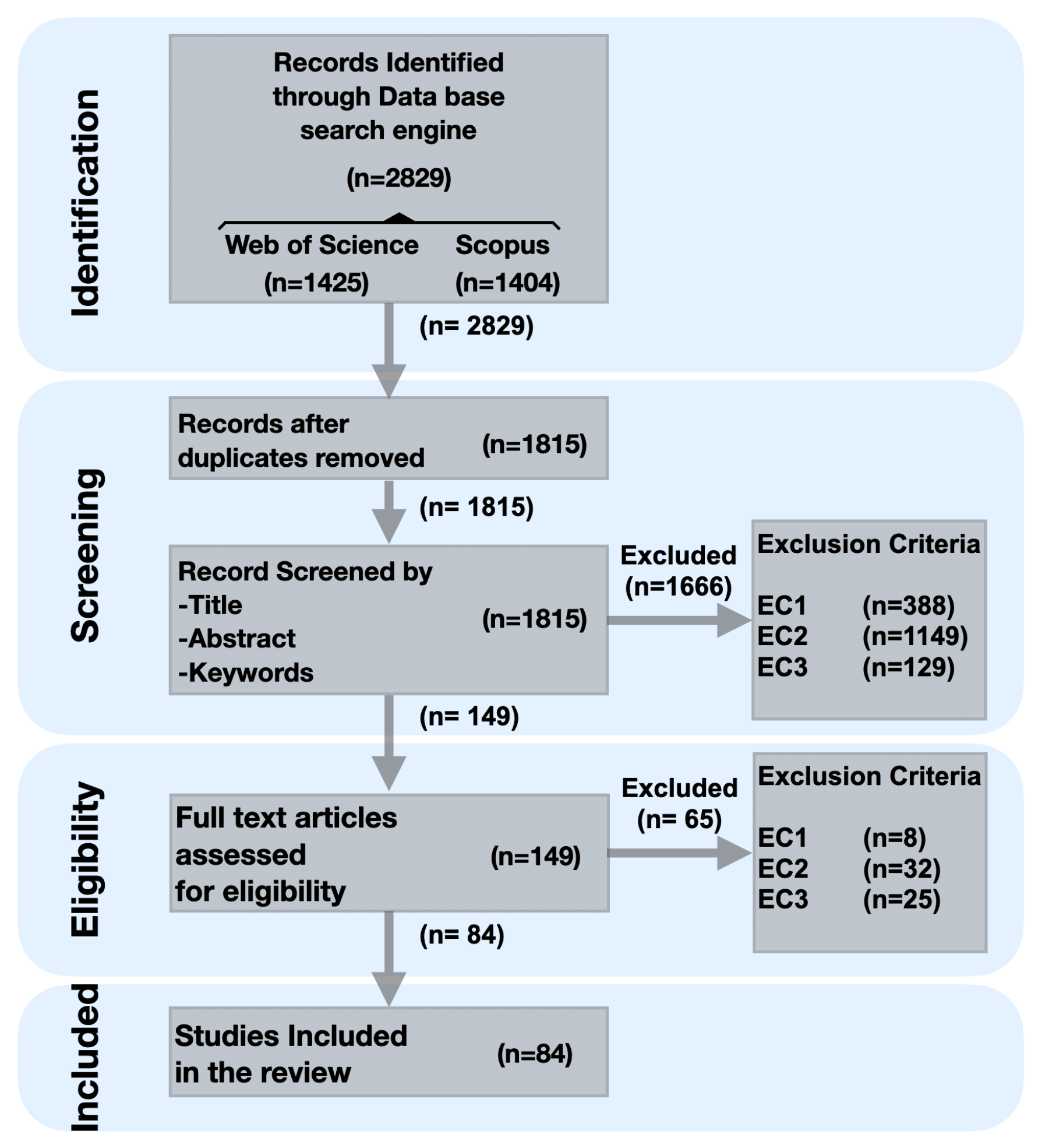
- EC1: Any articles that are not full papers (e.g., short papers, demo papers, extended abstracts), or are not primary research (e.g., reviews, surveys), or are not published in a peer-reviewed international conference or journal (e.g., white books, blog posts, workshop papers).
- EC2: Any articles that do not propose or analyze as main topic at least one CIPS for providing a user’s indoor position (e.g., non-collaborative systems, outdoor systems, algorithms outside the context of a CIPS) or target non-human use (e.g., aerial drones, underwater robotic systems).
- EC3: Any articles that do not consider the definition of collaboration as the action of joint working between neighboring actors to provide positioning (e.g., sensor fusion, data fusion algorithm, stand-alone device with multi-sensors cooperation).
3.3. Study Selection Process
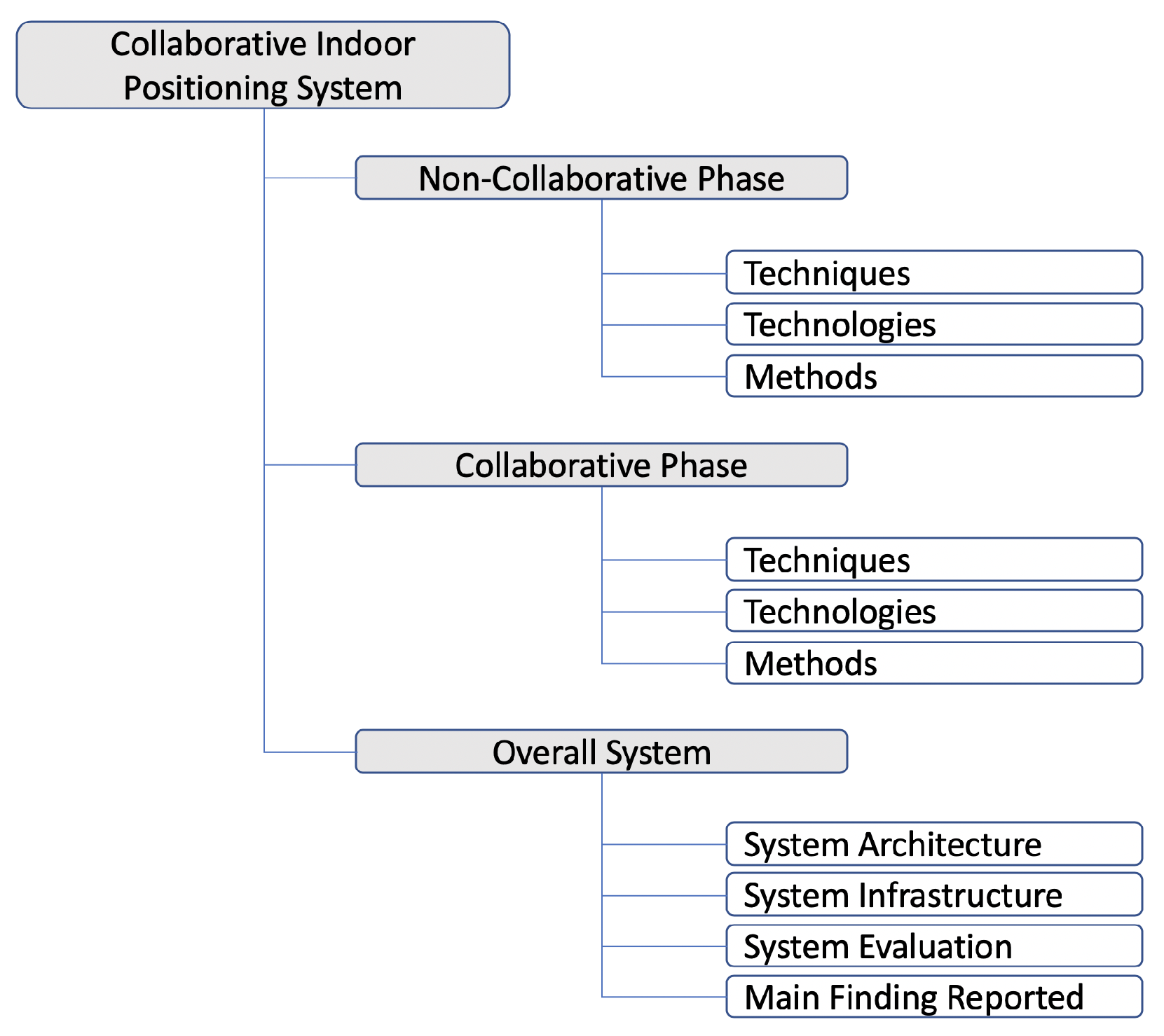
3.4. Classification of the Studies
3.4.1. Non-Collaborative and Collaborative Phases
- Technologies. This category covers the technologies used to calculate the position on one hand (non-collaborative part) and to provide collaboration between users or nodes on the other hand. In one CIPS, the same or different technologies may be used for either part. Examples of technologies include IMU, Radio-Frequency Identification (RFID), and VLC for the non-collaborative part, and Bluetooth Wi-Fi and UWB for both parts.
- Techniques. Includes the techniques used for positioning and collaboration between users or nodes. Examples of techniques include fingerprinting, Dead Reckoning (DR), and Time of Arrival/Flight (ToA/ToF) for the non-collaborative part, and position sharing, Two-way Ranging (TWR), and Time Difference of Arrival (TDoA) for the collaborative part. We define techniques as the way certain technologies and derived data are organized and used to achieve positioning.
- Methods. Includes the algorithms and mathematical methods to compute the positioning and integrate collaboration among users. Examples of methods include Received Signal Strength (RSS)-based, PDR and k-NN for the non-collaborative part, and Particle Filter, Belief Propagation and EKF for the collaborative part. We define methods as a set of logical rules or processes to be followed in calculations in order to determine a positioning estimate.
3.4.2. Overall System
- System Architecture. The System Architecture refers to the type of data processing architecture used in the CIPS, distributed or centralized in this review.
- System Infrastructure. The hardware deployed in the environment that the CIPS requires to operate such as BLE beacons, RFID tags, fixed cameras, and other ad hoc elements installed in the environment.
- System Evaluation. This category refers to how the system’s accuracy and performance are evaluated, for example, using numerical simulation, field tests, or both.
- Main Finding(s) Reported. In this category the main findings reported by the authors of the CIPS are classified. They are related with the evaluation metrics (position accuracy, position precision, system robustness, computational complexity, energy consumption), which are strongly linked with overarching concerns (i.e., concerns not specific to a particular architecture, infrastructure, technology, technique or method, but instead relevant for all systems), limitations of the systems and future research avenues.
4. Results
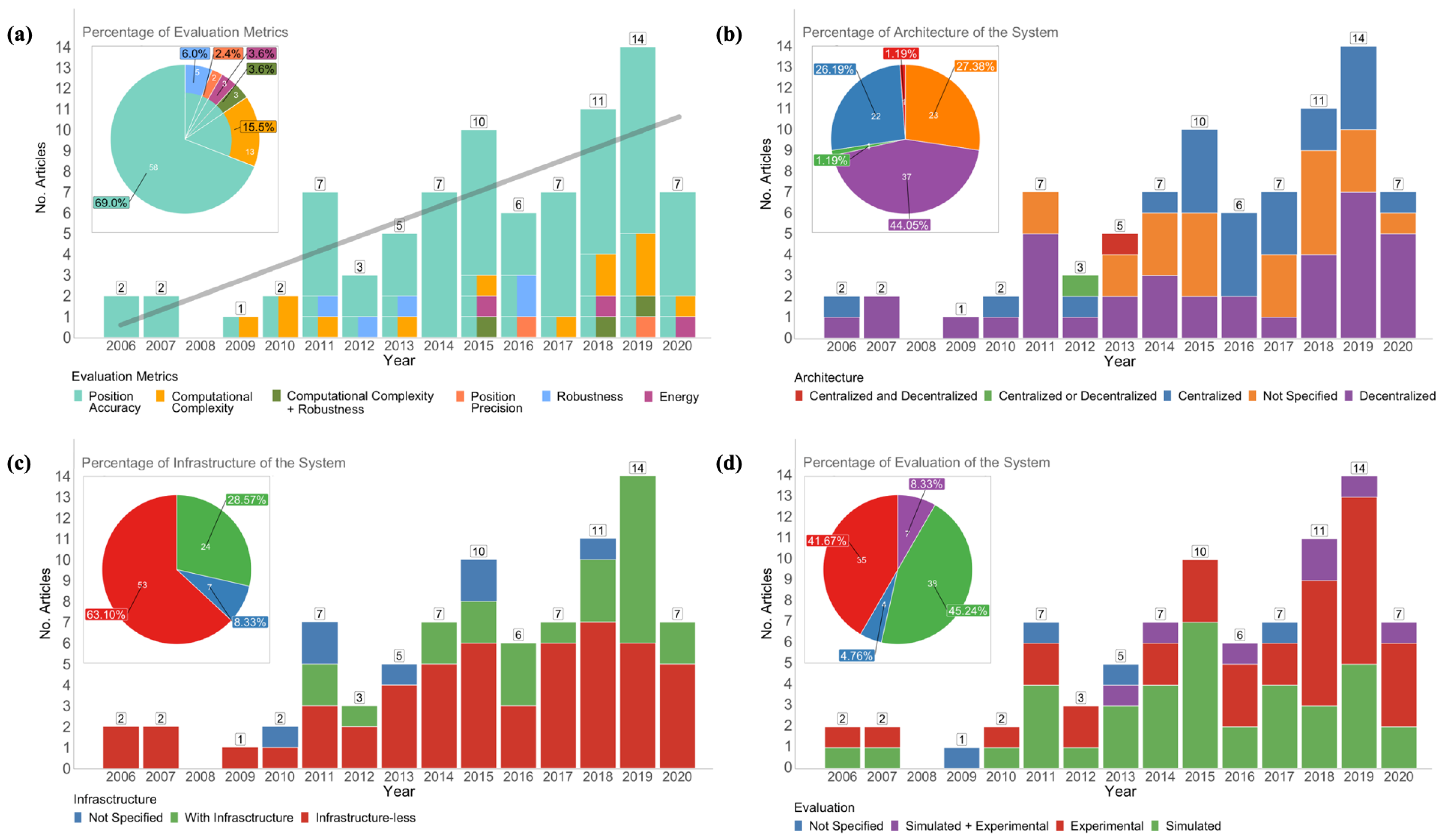
4.1. Evolution of CIPS over Time and Their Evaluation Metrics
4.2. Infrastructure and Architecture
4.3. Non-Collaborative Technologies, Techniques, and Methods
- The most used technology, Wi-Fi (used in 53.5% of all articles), was in the majority of cases combined with the Received Signal Strength Indicator (RSSI) technique (42% of articles using Wi-Fi technology), also to an equal amount with Fingerprinting (42%).
- The Inertial Measurement Unit (IMU) technology was exclusively used in combination with the Dead Reckoning (DR) techniques and the Pedestrian Dead Reckoning (PDR) methods (with the exception of a single use of a collaborative algorithm).
- Wi-Fi and Ultra-wide band (UWB) were the technologies that had been combined with the largest number of techniques (four techniques each). The most common technique for both technologies was Received Signal Strength Indicator (RSSI).
- Dead Reckoning (DR) was used in combination with a single technology, Inertial Measurement Unit (IMU).
- Received Signal Strength Indicator (RSSI) and Time of Arrival/Flight (ToA/ToF), respectively the first and fourth most used technique, were used in combination with the greatest number of different technologies (respectively seven and three technologies). The TDoA, TWR, and AoA techniques were used with two technologies each; all other techniques were used with a single technology (with the exception of the Fingerprinting that was used with Wi-Fi and Bluetooth).
- RSSI, Fingerprinting, and Time of Arrival/Flight (ToA/ToF) were used with the highest number of methods (six methods each).
- The two most popular methods, PDR-based and Cooperative methods, were used in almost half of the articles (53.5%). Together with the group of four reasonably well-used methods (i.e., Ranging, RSSI-based, Fingerprinting-based methods, and k-NN), they appeared in almost 98% of the reviewed papers. The remaining 10 methods were less common and appeared in less than 20% of papers.
- The popular Cooperative and Ranging methods (respectively second and third most used) were combined with a variety of techniques. Cooperative methods were used in combination with RSSI (45% inputs), TDoA (20% inputs), ToA/ToF (20% inputs), and with DR, TWR, Fingerprinting in 5% inputs each. Ranging methods were highly coupled with the RSSI technique (67% of inputs to the method), but it was also used with other techniques, namely TWR (17% inputs), ToA/ToF (8% inputs), and UTDoA (8% inputs). In contrast, k-NN exclusively worked with the Fingerprinting technique, which in turn was mainly used in combination with the Wi-Fi technology.
- Artificial Intelligence (AI) was present in three positioning methods, namely k-NN (in 9.5% of analysed works), and k-Means Clustering + Random Forest and Kullback-Leibler Divergence the (in 1.1% of analyzed works each).
- Almost half of the methods (7 out of 16) were only used in one article and were evidently each combined with a single technique and method.
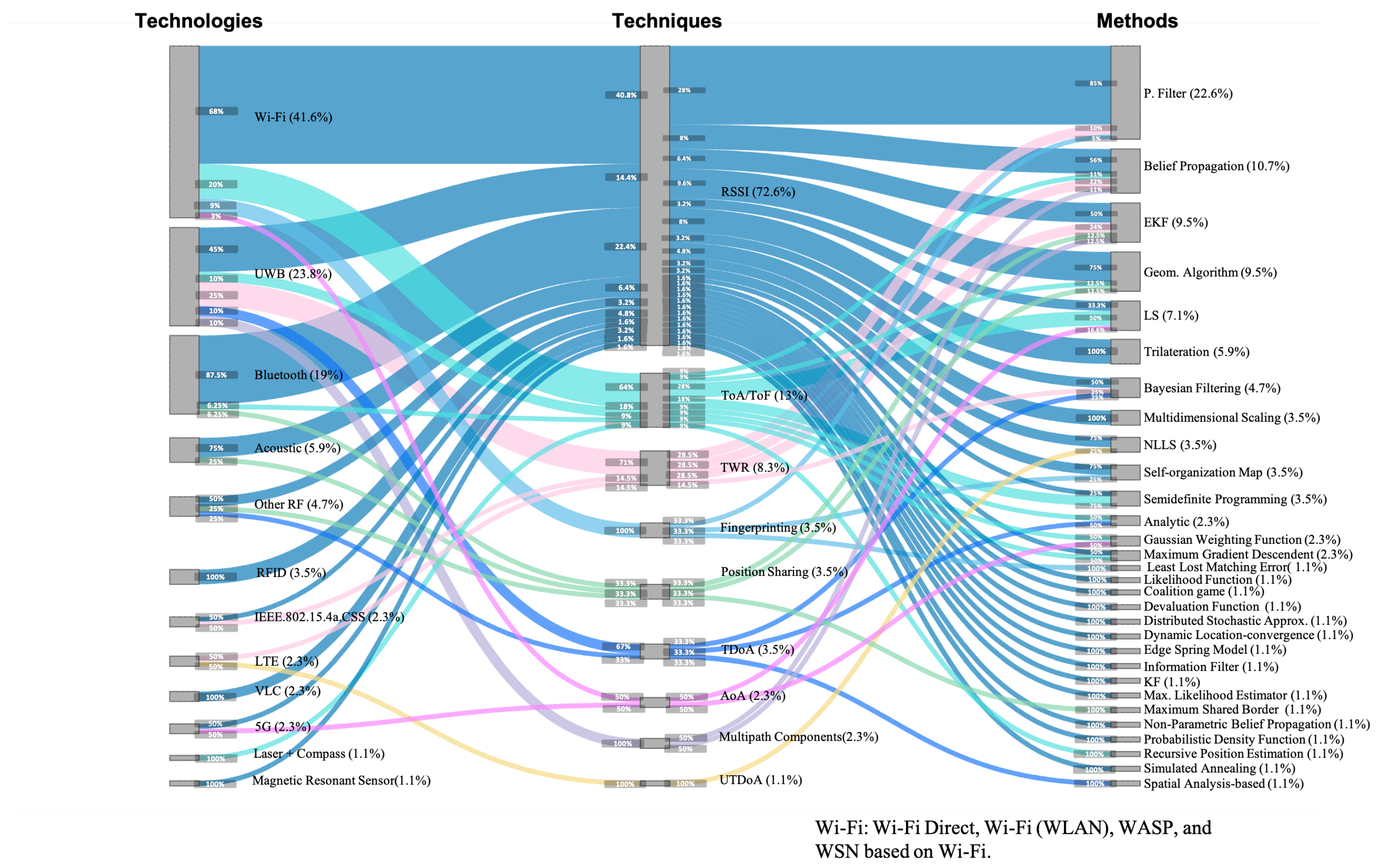
4.4. Collaborative Technologies, Techniques, and Methods
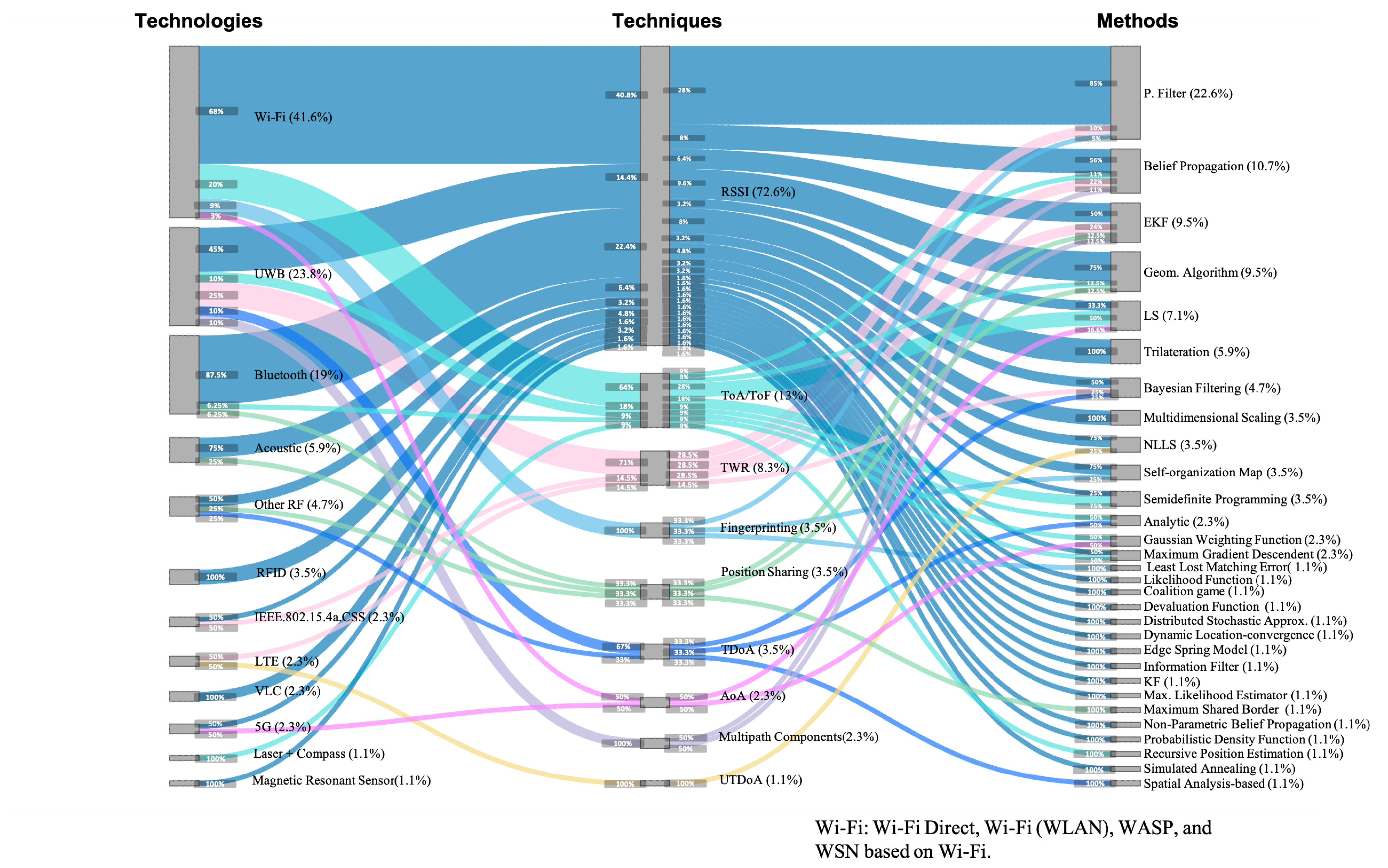
- The most used technology, Wi-Fi (used in 41.6% of all articles) was in the majority of cases combined with the RSSI technique (68% of articles using Wi-Fi technology), yet to a lower extent also with ToA/ToF (20%), Fingerprinting (9%) and minimally with AoA (3%).
- The top three technologies, Wi-Fi, UWB, and Bluetooth, were all combined with multiple techniques, respectively with four, five, and three. Specifically Wi-Fi with RSSI, ToA/ToF, Fingerprinting, and AoA; UWB with RSSI, ToA/ToF, TWR, TDoA, and Multipath components; Bluetooth with RSSI, ToA/ToF, and Positioning sharing, as can be observed in Figure 6.
- The RSSI technique was by far mostly used (72.6%) and was combined with a large variety of technologies and methods. It was mostly combined with the technologies Wi-Fi (40.8%), Bluetooth (22.4%), UWB (14.4%), Acoustic (6.4%), RFID (4.8%), Other RF (3.2%), VLC (3.2%), IEEE.802.15.4a.CSS (1.6%), Magnetic Resonant Sensor (1.6%), and it was combined with 24 of the 30 methods, with Particle Filter being the most used (28%) combination.
- From virtually every technique, there was a diversity of combined technologies and methods. Only Fingerprinting and Multipath Components were combined with a single technology, respectively Wi-Fi and UWB; all techniques, except UTDoA that appeared in just one paper, were combined with multiple methods.
- The most used method, Particle Filtering, was used 85% in combination with RSSI, 10% in combination with TWR, and 5% with Fingerprinting.
- Artificial Intelligence (AI) had a significant presence in collaborative methods, with more than 20 out of 30 methods. The most popular methods were Particle Filter, Belief Propagation, Least Square, and Bayesian Filtering, which were present in a 22.6%, 10.7%, 7.1%, and 4.7% of works, respectively. Other interesting AI methods were Mutidimensional Scaling, Non-Linear Least Squares (NLLSs), Self-organizing Map, and Semidefinite Programming, each present in 3.5% of works, followed by Gaussian Weighting Function and Max. Gradient Descendent with a presence in 2.3% papers each. The least common collaborative AI methods appeared in just one paper each and included Likelihood Function, Coalitional Game, Devaluation Function, Distributed Stochastic Approx., Information Filter, Max. Likelihood Estimator, Max. Shared Border, Non-parametric Belief Propagation, Probabilistic Density Distribution, Recursive Position Estimation, and Simulated Annealing.
- A majority of methods were only used once (16 of 30) or twice (6 of 30). Evidently, methods that were used once combined with a single technique and method.
4.5. Evaluation of Systems
5. Discussion
5.1. Architectures and Infrastructure of Collaborative Indoor Position Systems
5.2. Technologies, Techniques, and Methods in Collaborative Indoor Positioning Systems
5.2.1. Analysis on the Non-Collaborative Part
5.2.2. Analysis on Collaborative Part
5.2.3. Overarching Concerns
5.3. Evaluation of Collaborative Indoor Position Systems
5.4. Recommendations, Gaps, and Limitations
- Architecture: A decentralized architecture is the most suitable option for a collaborative approach since it avoids communication bottlenecks, delays in response times, and dependence on a server. However, computing algorithms on (restricted) user devices limits the implementation of complex algorithms and, due to device variability, its performance might not be homogeneous for all users.
- Infrastructure: A CIPS based on Infrastructure-less approach or based on signals of opportunity might be preferable, due to the continuous mobility of users in different environments, and the cost of developing an infrastructure to provide coverage of the operational area. In addition, an Infrastructure-less approach provides versatility to the system in order to be used in a larger number of scenarios. However, the lack of an ad hoc infrastructure for the CIPS implies a challenge in its design in order to compensate for the inaccurate positioning that the uncontrolled environments provide. Only for specific real-world scenarios, an infrastructure-based approach may be preferable.
- Technologies: Despite the great accuracy and precision positioning provided by some technologies (mainly VLC, UWB, and 5G), Wi-Fi and BLE might currently be better suited, as other relevant factors are the ubiquity of the technologies used, the low implementation costs, and the low energy consumption that Wi-Fi and BLE offer. An evolution in general availability and supporting hardware, e.g., particularly in the case of 5G, may cause a shift in preferred technology.
- Techniques: From the point of view of positioning accuracy and considering Wi-Fi as main positioning technology, Wi-Fi Fingerprinting is widely used because the position of the anchors (APs) is not needed. However, the techniques based on RSSI perform better as the geometry and distribution of the APs are well known. Further investigation of the supporting infrastructure—e.g., estimating the APs by manual inspection or automatic detection [161,162]—might allow the replacement of fingerprint-based with more accurate RSSI-based methods.
- Methods: Due to the diversity of scenarios and conditions in which the systems have been tested, it is difficult to specify which method is the most appropriate. We consider that different alternative methods should be compared in different dimensions—mainly accuracy, precision, robustness, and computational cost—when a new CIPS is proposed, and the final proposed one should be selected according to some pre-defined criteria (e.g., best positioning error, lowest execution time, or a trade-off between the two).
- The proposed CIPSs tend to focus on excelling in one relevant characteristic, mainly the deployment costs, the computational complexity, the real-time operation, energy consumption, or the positioning accuracy. The main limitation of current CIPSs is that none of them try to balance all these aspects, specially in complex environments.
- In general, the CIPS select a single technology for the non-collaborative part and a single technology for the collaborative part. Generally, the reviewed CIPS neither exploit sensor fusion nor multiple positioning alternatives. We consider that technology diversity in both parts might make the CIPS more robust, as it has been demonstrated in conventional IPS.
- None of the reviewed works = considered the privacy of the users nor the security of the CIPSs. Privacy is a main overarching concern that has already been regulated in many countries (e.g., the European General Data Protection Regulation (GDPR) [163]). The vast majority of positioning solutions (in the non-collaborative and collaborative phase) rely on communication technologies that can be attacked (i.e., jamming or spoofing mainly) to alter the outputs of the positioning system and/or the sensing data processed by the user, which might be considered a security breach of the CIPS. Energy consumption is also a relevant overarching concern, which may deter users from using a CIPS, and this area is insufficiently studied.
- The evaluations of the CIPSs are tightly coupled to the technology used in the non-collaborative part. The community needs an evaluation framework able to objectively evaluate the collaborative part of the CIPS with independence to the positioning technology used in the non-collaborative part. An important part of such a framework is comparable evaluation metrics. Moreover, evaluation considering multiple technologies working simultaneously has not been widely explored yet.
- Evaluation is done over simulations in almost half of reviewed works because it does not require deploying expensive hardware and manual labor. Although some simulated environments are able to mimic the real world, a comprehensive empirical evaluation is needed to demonstrate the feasibility of the proposed CIPSs in realistic conditions. A repository of extensive multi-sensor and multi-user datasets for that purpose could enhance research reproducibility, enable the fair comparison of CIPSs, reduce evaluation costs (assuming the datasets are publicly available), and be an incentive to further research CIPSs.
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| AAL | Ambient Assisted Living |
| AI | Artificial Intelligence |
| AoA | Angle of Arrival |
| AP | Access Point |
| BLE | Bluetooth Low Energy |
| CDF | Cumulative distribution Function |
| CIPS | Collaborative Indoor Positioning System |
| CSI | Channel State Information |
| CTP | Collection tree protocol |
| D2D | Device to Device |
| DR | Dead Reckoning |
| EKF | Extended Kalman Filter |
| FM | Frequency Modulation |
| GLONASS | Globalnaya Navigazionnaya Sputnikovaya Sistema |
| GDPR | General Data Protection Regulation |
| GNSS | Global Navigation Satellite System |
| GPS | Global Positioning System |
| IMU | Inertial Measurement Unit |
| IoT | Internet of Things |
| IPS | Indoor Position System |
| k-NN | k-Nearest Neighbors |
| LBS | location-based service |
| LOS | Line-of-sight |
| LS | Least Square |
| LTE | Long-Term Evolution |
| MEMS | Microelectro-Mechanical System |
| NLLS | Non-Linear Least Square |
| NLOS | Non-line-of-sight |
| PDR | Pedestrian Dead Reckoning |
| PRISMA | Preferred Reporting Items for Systematic Reviews and Meta-Analyses |
| RF | Radio Frequency |
| RFID | Radio-Frequency Identification |
| RMSE | Root Mean Square Error |
| RSS | Received Signal Strength |
| RSSI | Received Signal Strength Indicator |
| SVM | Support Vector Machine |
| TDoA | Time Difference of Arrival |
| ToA | Time of Arrival |
| ToA/ToF | Time of Arrival/Flight |
| TWR | Two-way Ranging |
| UDP | User Datagram Protocol |
| UTDoA | Uplink Time-Difference-of-Arrival |
| UWB | Ultra-wide band |
| VLC | Visible Light Communication |
| WASP | Wireless Application Service Provider |
| Wi-Fi | IEEE 802.11Wireless LAN |
| WSN | Wireless Sensor Network |
Appendix A
Appendix A.1. Search Queries

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Database | Input Query | No. Articles |
|---|---|---|
| Scopus | (TITLE-ABS-KEY (((Collabora* OR Coopera*) AND Indoor) AND (Position* OR Track* OR Locati* OR Locali* OR Navigat*)) AND LANGUAGE (english)) | 1404 |
| Web of Science | TS=((Collabora* OR Coopera*) AND Indoor AND (Position* OR Track* OR Locati* OR Locali* OR Navigat*)) | 1425 |
Appendix A.2. Articles Included in the Systematic Review
| Year | Ref. | Technology | Technique | Method | Arch. | Infr. | Eval. | Eval. Metric | |||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Non-Collaborative | Collaborative | Non-Collaborative | Collaborative | Non-Collaborative | Collaborative | ||||||
| 2020 | [143] | Bluetooth | Bluetooth | F. printing | RSSI | F. printing-B. | Geom. Algorithm | D | I-L | E | PA |
| [144] | IMU, UWB | UWB | DR, RSSI | RSSI | PDR-B. M., Ranging | Bayessian F. | D | W/I | S | PA+E | |
| [145] | IMU | Bluetooth | DR | RSSI | PDR-B. M. | EKF | D | I-L | E | PA | |
| [146] | IMU | Wi-Fi, UWB | DR | RSSI | PDR-B. M. | P. Filter | D | I-L | S+E | PA+CC | |
| [147] | IMU, Wi-Fi | UWB | DR, F. printing | TWR | PDR-B. M., F. printing-B | P.Filter | D | I-L | E | PA | |
| [148] | 5G | 5G | RSSI | RSSI | Coop. Algorithm | LS | N/S | W/I | S | PA | |
| [149] | Wi-Fi | Bluetooth | F. printing | RSSI | F. printing-B | P. Filter | C | I-L | E | PA | |
| 2019 | [141] | IMU | UWB | DR | TWR | PDR-B. M. | EKF | D | W/I | E | PA |
| [140] | UWB | UWB | TWR | TWR | Coop. Algorithm | EKF | C | W/I | E | PA | |
| [139] | UWB | UWB | TDoA | TDoA | Coop. Algorithm | Bayesian F. | N/S | W/I | E | PA | |
| [138] | UWB | UWB | TDoA | TDoA | Coop. Algorithm | Analytic | N/S | W/I | E | PA | |
| [137] | 5G | 5G | AoA | AoA | Multilateration | LS | D | I-L | S | PA+CC | |
| [49] | UWB | UWB | ToA/ToF | ToA/ToF | Entropy-based ToA | LS | D | I-L | S | PA+PP | |
| [81] | Wi-Fi | Wi-Fi | RSSI | RSSI | Ranging | Multidimensional Scaling | N/S | I-L | S | PA+CC+R | |
| [77] | VLC | VLC | RSSI | RSSI | RSSI-B. M. | Max. Likelihood E. | D | W/I | S | PA+CC | |
| [80] | RFID | RFID | RSSI | RSSI | Anlytic | Multidimensional Scaling | C | W/I | E | PA | |
| [135] | VLC | VLC | RSSI | RSSI | Trilateration | B. Propagation | D | W/I | E | PA | |
| [79] | Wi-Fi | Wi-Fi | F. printing | ToA/ToF | KNN | Analytic | D | I-L | E | PA | |
| [137] | Wi-Fi | Wi-Fi | F. printing | RSSI | KNN | Geom. Algorithm | N/S | I-L | E | PA | |
| [46] | UWB | UWB | RSSI | RSSI | Ranging | B. Propagation | D | I-L | S | PA+CC | |
| [142] | Wi-Fi, Bluetooth | Wi-Fi, Bluetooth | RSSI | RSSI | Coop. Algorithm | Geom. Algorithm | C | W/I | S+E | PA | |
| 2018 | [134] | Wi-Fi | Wi-Fi | F. printing | RSSI | KNN | Geom. Algorithm | N/S | I-L | E | PA |
| [48] | Wi-Fi | Other RF | RSSI | TDoA | RSSI-B. M. | Spatial Analysis-based | N/S | I-L | S | PA | |
| [129] | IMU, RFID | RFID | DR, RSSI | RSSI | PDR-B. M., RSSI-B. M. | P. Filter | C | W/I | E | PA | |
| [133] | Wi-Fi | Wi-Fi | RSSI, ToA/ToF | RSSI, ToA/ToF | Coop. Algorithm | LS | N/S | N/S | E | PA | |
| [132] | UWB | UWB | TWR | TWoA | Ranging | B. Propagation | N/S | W/I | S | PA+CC | |
| [43] | IMU, Wi-Fi | Wi-Fi, Bluetooth | DR, RSSI | RSSI | PDR-B. M. | Geom. Algorithm | D | I-L | E | PA+E | |
| [131] | IMU | Bluetooth, Acoustic | DR | RSSI | PDR-B. M. | B. Propagation | D | I-L | E | PA+CC+R | |
| [130] | Wi-Fi | Wi-Fi | RSSI | RSSI | Ranging | B. Propagation | N/S | I-L | S | PA+CC | |
| [44] | Wi-Fi | Bluetooth | F. printing | RSSI | K-mean clustering+R. Forest | P. Filter | C | W/I | E | PA | |
| [128] | IMU | UWB | DR | TWR | PDR-B. M. | Bayesian F. | D | I-L | S+E | PA | |
| [63] | IMU, Wi-Fi | Wi-Fi | DR, F. printing | F. printing | PDR-B. M., KNN | Least Lost Matching E | D | I-L | S+E | PA | |
| 2017 | [127] | IMU | Other RF | DR | Pos. Sharing | PDR-B. M. | Geom. Algortihm | C | W/I | S | PA |
| [126] | LTE | LTE | TDoA | TWR | Coop. Algorithm | P. Filter | D | I-L | S | PA | |
| [125] | Hybrid S. | Other RF | Hybrid Techni. | RSSI | Hybrid Methods | EKF | N/S | I-L | N/S | PA | |
| [124] | Laser+Compass | Laser+Compass | ToA/ToF | ToA/ToF | Geom. Ranging | Geom. Algorithm | C | I-L | E | PA | |
| [123] | IMU, Wi-Fi | Bluetooth | DR, RSSI | RSSI | PDR-B. M., RSSI-B. M. | P. Filter | N/S | I-L | S | PA | |
| [122] | Wi-Fi | Wi-Fi | ToA/ToF | ToA/ToF | Coop. Algorithm | Semidefinite Programming | C | I-L | S | PA+CC | |
| [121] | IMU | UWB | DR | RSSI | Coop. Algorithm | Info. Filter | N/S | I-L | E | PA | |
| 2016 | [120] | IMU | UWB | DR | RSSI | PDR-B. M. | P. Filter | D | I-L | E | PA+R |
| [119] | Wi-Fi | Wi-Fi | F. printing | ToA/ToF | KNN | Max. Grad. Descendent | D | I-L | S | PA | |
| [118] | IMU, Wi-Fi | Wi-Fi, Acoustic | DR, F. printing | RSSI | PDR-B. M., KNN | P. Filter | C | W/I | S+E | PA | |
| [117] | IMU | RFID | DR | RSSI | PDR-B. M. | P. Filter | C | W/I | E | PA | |
| [116] | Wi-Fi | Other RF | F. printing | RSSI | Kullbakc-Leibler Div. | Multidimensional Scaling | C | W/I | E | PA+R | |
| [115] | UWB | UWB | TDoA | RSSI | Coop. Algorithm | EKF | C | I-L | S | PA+PP | |
| 2015 | [150] | UWB | UWB | RSSI | Multiphath C. | Ranging | EKF | N/S | N/S | S | PA+CC+R |
| [114] | Wi-Fi | Wi-Fi | F. printing | RSSI | KNN | Self-organized map | D | I-L | S | PA | |
| [42] | Wi-Fi | Wi-Fi, Bluetooth | RSSI | RSSI | Ranging | Trilateration | C | I-L | E | PA+E | |
| [113] | LTE | LTE | UTDoA | UTDoA | Ranging | NLLS | C | I-L | S | PA | |
| [105] | Wi-Fi | Wi-Fi | ToA/ToF | ToA/ToF | Coop. Algorithm | Semidefinite Programming | N/S | N/S | S | PA | |
| [111] | UWB | UWB | RSSI | RSSI | Ranging | Simulated Annealing | N/S | W/I | S | PA | |
| [110] | IMU | Wi-Fi | DR | RSSI | PDR-B. M. | Semidefinite Programming | N/S | I-L | S | PA | |
| [109] | Wi-Fi | Wi-Fi | ToA/ToF | ToA/ToF | Ranging | B. Propagation | D | W/I | E | PA+CC | |
| [108] | Wi-Fi | Bluetooth | F. printing | RSSI | KNN | Edge Spring M. | C | I-L | S | PA | |
| [41] | Wi-Fi | Bluetooth | RSSI | RSSI | RSSI-B. M. | Trilateration | C | I-L | E | PA | |
| 2014 | [107] | IMU | Acoustic | DR | Pos. Sharing | PDR-B. M. | EKF | D | I-L | E | PA |
| [106] | IMU | UWB | DR | RSSI | PDR-B. M. | EKF | N/S | I-L | S | PA | |
| [40] | Wi-Fi | Wi-Fi | RSSI | RSSI | RSSI-B. M. | Trilateration | C | I-L | E | PA | |
| [105] | Wi-Fi | Wi-Fi | RSSI | RSSI | Coop. Algorithm | D. Stochastic Approx. | D | W/I | S | PA | |
| [104] | Wi-Fi | Bluetooth | RSSI | RSSI | Multilatration | Max. Grad. Descendent | N/S | I-L | S | PA | |
| [45] | Wi-Fi | Bluetooth | ToA/ToF | ToA/ToF | Trilateration | LS | D | I-L | S+E | PA | |
| [103] | Wi-Fi | Wi-Fi | RSSI | RSSI | RSSI-B. M. | Self-organazed map | N/S | W/I | S | PA | |
| 2013 | [102] | IMU, Wi-Fi | Wi-Fi | DR, F. printing | RSSI, F. printing | PDR-B. M., F. printing-B. M. | P. Filter | N/S | I-L | S | PA |
| [101] | IMU | Acoustic | DR | RSSI | PDR-B. M. | KF | D | I-L | N/S | PA | |
| [100] | Wi-Fi | Wi-Fi | F. printing | RSSI | F. printing-B. M. | Likelihood func. | C&D | I-L | S | PA | |
| [99] | UWB | UWB | RSSI | RSSI | Coop. Algorithm | Non-Parametric B. Propagation | N/S | N/S | S | PA+CC | |
| [98] | IMU, Wi-Fi | Wi-Fi | DR, F. printing | RSSI | PDR-B. M., F. printing-B. M. | P. Filter | D | I-L | S+E | PA+R | |
| 2012 | [97] | IMU | Bluetooth | DR | RSSI | PDR-B. M. | Bayessian F. | D | I-L | E | PA |
| [47] | IEEE.802.15.4a.CSS | IEEE.802.15.4a.CSS | TWR | TWR | Ranging | B. Propagation | C | W/I | E | PA+R | |
| [96] | UWB | UWB | ToA/ToF | Multipath C. | Coop. Algorithm | B. Porpagation | C/D | I-L | S | PA | |
| 2011 | [95] | Wi-Fi | Wi-Fi | F. printing | F. printing | Coop. Algorithm | Self-organized map | D | I-L | S | PA+CC |
| [50] | Wi-Fi | Wi-Fi | AoA, ToA/ToF | AoA, ToA/ToF | Geom. Ranging | GWF | N/S | I-L | S | R | |
| [94] | IEEE.802.15.4a.CSS | IEEE.802.15.4a.CSS | RSSI | RSSI | Multilateration | Trilateration | D | W/I | E | PA | |
| [93] | Wi-Fi | Wi-Fi | RSSI | RSSI | Ranging | P. Filter | N/S | N/S | S | PA | |
| [92] | IMU | Magnetic Resonant S. | DR | RSSI | PDR-B. M. | Probabilistic D. Distrib. | D | I-L | N/S | PA | |
| [91] | Camera | Bluetooth | QR Code | RSSI | QR Code Recongnition | Devaluation Func. | D | W/I | E | PA | |
| [90] | Wi-Fi | Wi-Fi | RSSI | RSSI | Coop. Algorithm | Coalitional Game | D | N/S | S | PA+CC | |
| 2010 | [89] | Wi-Fi | Wi-Fi | RSSI | RSSI | RSSI-B. M. | P. Filter | C | N/S | S | PA+CC |
| [88] | Wi-Fi | Wi-Fi | RSSI | RSSI | Coop. Algorithm | NLLS | D | I-L | E | PA+CC | |
| 2009 | [87] | Wi-Fi | Bluetooth | F. printing | Pos. Sharing | Max. Shared Border | Max. shared Border | D | I-L | N/S | PA+CC |
| 2007 | [86] | UWB | UWB | ToA/ToF | ToA/ToF | Multilateration | Rec. Pos. Est. | D | I-L | S | PA |
| [85] | Wi-Fi | Wi-Fi | RSSI | RSSI | Coop. Algorithm | NLLS | D | I-L | E | PA | |
| 2006 | [83] | Wi-Fi | Wi-Fi | F. printing | RSSI | F. printing-B. M. | P. Filter | D | I-L | E | PA |
| [84] | Wi-Fi | Wi-Fi | RSSI | RSSI | RSSI-B. M. | D. Loc-coverage | C | I-L | S | PA | |
References
- Kushki, A.; Plataniotis, K.N.; Venetsanopoulos, A.N. WLAN Positioning Systems: Principles and Applications in Location-Based Services; Cambridge University Press: Cambridge, MS, USA, 2012. [Google Scholar]
- Gaddam, A.; Mukhopadhyay, S.C.; Gupta, G.S. Smart home for elderly care using optimized number of wireless sensors. In Proceedings of the 2009 4th International Conference on Computers and Devices for Communication (CODEC), Kolkata, India, 14–16 December 2009; pp. 1–4. [Google Scholar]
- Rahal, Y.; Mabilleau, P.; Pigot, H. Bayesian Filtering and Anonymous Sensors for Localization in a Smart Home. In Proceedings of the 21st International Conference on Advanced Information Networking and Applications Workshops (AINAW’07), Niagara Falls, ON, Canada, 21–23 May 2007; Volume 2, pp. 793–797. [Google Scholar]
- Mendoza, M.B.; Bergado, C.A.; De Castro, J.L.B.; Siasat, R.G.T. Tracking system for patients with Alzheimer’s disease in a nursing home. In Proceedings of the TENCON 2017—2017 IEEE Region 10 Conference, Penang, Malaysia, 5–8 November 2017; pp. 2566–2570. [Google Scholar]
- Noury, N.; Virone, G.; Creuzet, T. The health integrated smart home information system (HIS/sup 2/): Rules based system for the localization of a human. In Proceedings of the 2nd Annual International IEEE-EMBS Special Topic Conference on Microtechnologies in Medicine and Biology, Proceedings (Cat. No.02EX578), Madison, WI, USA, 2–4 May 2002; pp. 318–321. [Google Scholar]
- Lee, C.K.M.; Ip, C.M.; Park, T.; Chung, S.Y. A Bluetooth Location-based Indoor Positioning System for Asset Tracking in Warehouse. In Proceedings of the 2019 IEEE International Conference on Industrial Engineering and Engineering Management (IEEM), Macao, China, 15–18 December 2019; pp. 1408–1412. [Google Scholar]
- Zhao, Z.; Fang, J.; Huang, G.Q.; Zhang, M. iBeacon enabled indoor positioning for warehouse management. In Proceedings of the 2016 4th International Symposium on Computational and Business Intelligence (ISCBI), Olten, Switzerland, 5–7 September 2016; pp. 21–26. [Google Scholar]
- Chou, S.; Chen, F.; Weng, R.; Wu, W.; Chang, C.; Hwang, C.; Chen, C.; Ting, V. Application of Bluetooth low energy indoor positioning to optical lenses manufacturing factory. In Proceedings of the 2018 IEEE International Instrumentation and Measurement Technology Conference (I2MTC), Houston, TX, USA, 14–17 May 2018; pp. 1–6. [Google Scholar]
- Silva, I.; Moreira, A.; Nicolau, M.; Pendão, C. Floor Plan-free Particle Filter for Indoor Positioning of Industrial Vehicles. In Proceedings of the WiP Proceedings of the International Conference on Localization and GNSS (ICL-GNSS 2020), Tampere, Finland, 2–4 June 2020; Available online: http://ceur-ws.org/Vol-2626/paper2.pdf (accessed on 10 December 2020).
- Fan, X.; Liu, J.; Wang, Z.; Jiang, Y.; Liu, X. Crowdsourced Road Navigation: Concept, Design, and Implementation. IEEE Commun. Mag. 2017, 55, 126–128. [Google Scholar] [CrossRef]
- Gan, M.; Gao, L. Discovering Memory-Based Preferences for POI Recommendation in Location-Based Social Networks. ISPRS Int. J. Geo-Inf. 2019, 8, 279. [Google Scholar] [CrossRef] [Green Version]
- Besoain, F.; Perez-Navarro, A.; Aviñó, C.J.; Caylà, J.A.; Barriga, N.A.; de Olalla, P.G. Prevention of HIV and Other Sexually Transmitted Infections by Geofencing and Contextualized Messages with a Gamified App, UBESAFE: Design and Creation Study. JMIR mHealth uHealth 2020, 8, e14568. [Google Scholar] [CrossRef] [PubMed]
- Vasile, V.C.; Nafornita, C.; Borda, M. Comparative Study of Satellite Navigation Systems. In Proceedings of the 2018 International Symposium on Electronics and Telecommunications (ISETC), Timisoara, Romania, 8–9 November 2018; pp. 1–6. [Google Scholar]
- Basiri, A.; Lohan, E.; Moore, T.; Winstanley, A.; Peltola, P.; Hill, C.; Amirian, P.; Figueiredo e Silva, P. Indoor location based services challenges, requirements and usability of current solutions. Comput. Sci. Rev. 2017, 24, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Jiang, W.; Li, Y.; Rizos, C.; Cai, B.; Shangguan, W. Seamless Indoor-Outdoor Navigation based on GNSS, INS and Terrestrial Ranging Techniques. J. Navig. 2017, 70, 1183–1204. [Google Scholar] [CrossRef] [Green Version]
- Elmezayen, A.; El-Rabbany, A. Precise Point Positioning Using World’s First Dual-Frequency GPS/GALILEO Smartphone. Sensors 2019, 19, 2593. [Google Scholar] [CrossRef] [Green Version]
- National Coordination Office for Space-Based Positioning, Navigation. GPS.gov. Available online: https://www.gps.gov/systems/gps/performance/accuracy/#:~:text=For%20example%2C%20GPS%2Denabled%20smartphones,receivers%20and%2For%20augmentation%20systems (accessed on 18 June 2020).
- Puricer, P.; Kovar, P. Technical Limitations of GNSS Receivers in Indoor Positioning. In Proceedings of the 17th International Conference Radioelektronika, Brno, Czech Republic, 24–25 April 2007; pp. 1–5. [Google Scholar]
- Mautz, R. Indoor Positioning Technologies. Ph.D. Thesis, ETH, Zürich, Switzerland, 2012. [Google Scholar]
- Huynh, S.M.; Parry, D.; Fong, A.C.M.; Tang, J. Novel RFID and ontology based home localization system for misplaced objects. IEEE Trans. Consum. Electron. 2014, 60, 402–410. [Google Scholar] [CrossRef] [Green Version]
- Belmonte-Fernández, Ó.; Puertas-Cabedo, A.; Torres-Sospedra, J.; Montoliu-Colás, R.; Trilles-Oliver, S. An indoor positioning system based on wearables for ambient-assisted living. Sensors 2017, 17, 36. [Google Scholar] [CrossRef]
- Jihong, C. Patient Positioning System in Hospital Based on Zigbee. In Proceedings of the 2011 International Conference on Intelligent Computation and Bio-Medical Instrumentation, Wuhan, China, 14–17 December 2011; pp. 159–162. [Google Scholar]
- Shen, S.; Michael, N.; Kumar, V. Autonomous multi-floor indoor navigation with a computationally constrained micro aerial vehicle. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 2968–2969. [Google Scholar]
- Forster, C.; Lynen, S.; Kneip, L.; Scaramuzza, D. Collaborative monocular SLAM with multiple Micro Aerial Vehicles. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 3962–3970. [Google Scholar]
- Takeshita, T.; Tomizawa, T.; Ohya, A. A House Cleaning Robot System-Path indication and Position estimation using ceiling camera. In Proceedings of the 2006 SICE-ICASE International Joint Conference, Busan, Korea, 18–21 October 2006; pp. 2653–2656. [Google Scholar]
- Ohya, I.; Kosaka, A.; Kak, A. Vision-based navigation by a mobile robot with obstacle avoidance using single-camera vision and ultrasonic sensing. IEEE Trans. Robot. Autom. 1998, 14, 969–978. [Google Scholar] [CrossRef]
- DiGiampaolo, E.; Martinelli, F. Mobile Robot Localization Using the Phase of Passive UHF RFID Signals. IEEE Trans. Ind. Electron. 2014, 61, 365–376. [Google Scholar] [CrossRef]
- Popleteev, A. HIPS: Human-based indoor positioning system. In Proceedings of the 2016 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Alcala de Henares, Spain, 4–7 October 2016; pp. 1–7. [Google Scholar]
- Zhang, D.; Xia, F.; Yang, Z.; Yao, L.; Zhao, W. Localization Technologies for Indoor Human Tracking. In Proceedings of the 2010 5th International Conference on Future Information Technology, Busan, Korea, 21–23 May 2010; pp. 1–6. [Google Scholar]
- Gallagher, T.; Wise, E.; Li, B.; Dempster, A.G.; Rizos, C.; Ramsey-Stewart, E. Indoor positioning system based on sensor fusion for the Blind and Visually Impaired. In Proceedings of the 2012 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sydney, Australia, 13–15 November 2012; pp. 1–9. [Google Scholar]
- Hilsenbeck, S.; Bobkov, D.; Schroth, G.; Huitl, R.; Steinbach, E. Graph-Based Data Fusion of Pedometer and WiFi Measurements for Mobile Indoor Positioning. In Proceedings of the 2014 ACM International Joint Conference on Pervasive and Ubiquitous Computing; Association for Computing Machinery, ACM: New York, NY, USA, 2014; pp. 147–158. [Google Scholar]
- Shala, U.; Rodriguez, A. Indoor Positioning Using Sensor-Fusion in Android Devices. Available online: https://www.diva-portal.org/smash/get/diva2:475619/FULLTEXT02.pdf (accessed on 10 December 2020).
- Kok, M.; Hol, J.D.; Schön, T.B. Indoor Positioning Using Ultrawideband and Inertial Measurements. IEEE Trans. Veh. Technol. 2015, 64, 1293–1303. [Google Scholar] [CrossRef] [Green Version]
- Ahmetovic, D.; Murata, M.; Gleason, C.; Brady, E.; Takagi, H.; Kitani, K.; Asakawa, C. Achieving Practical and Accurate Indoor Navigation for People with Visual Impairments. In Proceedings of the 14th Web for All Conference on the Future of Accessible Work; Association for Computing Machinery: New York, NY, USA, 2017. [Google Scholar]
- Chen, X.; Wei, Q.H.; Zheng, C.G. Performance Evaluation and Comparison of Magnetometers for In-door Positioning. In Proceedings of the 2018 Ubiquitous Positioning, Indoor Navigation and Location-Based Services (UPINLBS), Wuhan, China, 22–23 March 2018; pp. 1–4. [Google Scholar]
- Luo, J.; Zhang, C.; Wang, C. Indoor Multi-Floor 3D Target Tracking Based on the Multi-Sensor Fusion. IEEE Access 2020, 8, 36836–36846. [Google Scholar] [CrossRef]
- Woodman, O.J. An Introduction to Inertial Navigation; Technical Report; University of Cambridge, Computer Laboratory: Cambridge, MA, USA, 2007. [Google Scholar]
- Jimenez Ruiz, A.R.; Seco Granja, F.; Prieto Honorato, J.C.; Guevara Rosas, J.I. Accurate Pedestrian Indoor Navigation by Tightly Coupling Foot-Mounted IMU and RFID Measurements. IEEE Trans. Instrum. Meas. 2012, 61, 178–189. [Google Scholar] [CrossRef] [Green Version]
- Zekavat, R.; Buehrer, R.M. Collaborative Position Location. In Handbook of Position Location: Theory, Practice, and Advances; IEEE: New York, NY, USA, 2019; pp. 885–941. [Google Scholar] [CrossRef]
- Cullen, G.; Curran, K.; Santos, J.; Maguire, G.; Bourne, D. CAPTURE-Cooperatively applied positioning techniques utilizing range extensions. In Proceedings of the IPIN 2014—2014 International Conference on Indoor Positioning and Indoor Navigation, Busan, Korea, 27–30 October 2014; pp. 340–346. [Google Scholar] [CrossRef]
- Cullen, G.; Curran, K.; Santos, J.; Maguire, G.; Bourne, D. To wireless fidelity and beyond-CAPTURE, extending indoor positioning systems. In Proceedings of the 2014 Ubiquitous Positioning Indoor Navigation and Location Based Service (UPINLBS 2014), Corpus Christ, TX, USA, 20–21 November 2015; pp. 248–254. [Google Scholar] [CrossRef]
- Cullen, G.; Curran, K.; Santos, J.; Maguire, G.; Bourne, D. CAPTURE-Extending the scope of self-localization in Indoor Positioning Systems. In Proceedings of the 2015 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Banff, AB, Canada, 13–16 October 2015. [Google Scholar] [CrossRef]
- Qiu, C.; Mutka, M. CRISP: Cooperation among smartphones to improve indoor position information. Wirel. Netw. 2018, 24, 867–884. [Google Scholar] [CrossRef]
- Ta, V.C.; Dao, T.K.; Vaufreydaz, D.; Castelli, E. Smartphone-Based User Positioning in a Multiple-User Context with Wi-Fi and Bluetooth. In Proceedings of the IPIN 2018—9th International Conference on Indoor Positioning and Indoor Navigation, Nantes, France, 24–27 September 2018. [Google Scholar] [CrossRef]
- Lami, I.; Maghdid, H.; Kuseler, T. SILS: A Smart Indoors Localization Scheme based on on-the-go cooperative Smartphones networks using onboard Bluetooth, WiFi and GNSS. In Proceedings of the 27th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS 2014), Tampa, FL, USA, 8–12 September 2014; Volume 1, pp. 503–509. [Google Scholar]
- Mendrzik, R.; Bauch, G. Position-Constrained Stochastic Inference for Cooperative Indoor Localization. IEEE Trans. Signal Inf. Process. Netw. 2019, 5, 454–468. [Google Scholar] [CrossRef]
- Garcia, G.; Wymeersch, H.; Riblier, W.; Cazalis, A. Cooperative localization with 802.15.4a CSS radios: Robustness to node failures. In Proceedings of the WPNC’12—2012 9th Workshop on Positioning, Navigation and Communication, Dresden, Germany, 15–16 March 2012; pp. 7–12. [Google Scholar] [CrossRef] [Green Version]
- Zhao, Q.; Liu, Y.; Wang, H.; Lv, H.; Feng, G.; Tang, M. A cooperative indoor localization method based on spatial analysis. Commun. Comput. Inf. Sci. 2018, 901, 628–637. [Google Scholar] [CrossRef]
- Yong, G.; Cai, Z.; Dong, H. A High Precision Indoor Cooperative Localization Scheme Based on UWB Signals. Lect. Notes Inst. Comput. Sci. Soc. Inf. Telecommun. Eng. 2019, 281, 628–636. [Google Scholar] [CrossRef]
- Chen, S.; Tan, S. Cooperative non-line-of-sight localization technique for indoor wireless network. In Proceedings of the ICICS 2011—8th International Conference on Information, Communications and Signal Processing, Singapore, 13–16 December 2011. [Google Scholar] [CrossRef]
- Liberati, A.; Altman, D.G.; Tetzlaff, J.; Mulrow, C.; Gøtzsche, P.C.; Ioannidis, J.P.; Clarke, M.; Devereaux, P.J.; Kleijnen, J.; Moher, D. The PRISMA statement for reporting systematic reviews and meta-analyses of studies that evaluate health care interventions: Explanation and elaboration. J. Clin. Epidemiol. 2009, 62, e1–e34. [Google Scholar] [CrossRef] [Green Version]
- Liu, H.; Darabi, H.; Banerjee, P.; Liu, J. Survey of wireless indoor positioning techniques and systems. IEEE Trans. Syst. Man Cybern. Part C (Appl. Rev.) 2007, 37, 1067–1080. [Google Scholar] [CrossRef]
- Mendoza-Silva, G.M.; Torres-Sospedra, J.; Huerta, J. A meta-review of indoor positioning systems. Sensors 2019, 19, 4507. [Google Scholar] [CrossRef] [Green Version]
- Zafari, F.; Gkelias, A.; Leung, K.K. A Survey of Indoor Localization Systems and Technologies. IEEE Commun. Surv. Tutor. 2019, 21, 2568–2599. [Google Scholar] [CrossRef] [Green Version]
- Gu, Y.; Lo, A.; Niemegeers, I. A survey of indoor positioning systems for wireless personal networks. IEEE Commun. Surv. Tutor. 2009, 11, 13–32. [Google Scholar] [CrossRef] [Green Version]
- He, S.; Chan, S.G. Wi-Fi Fingerprint-Based Indoor Positioning: Recent Advances and Comparisons. IEEE Commun. Surv. Tutor. 2016, 18, 466–490. [Google Scholar] [CrossRef]
- Güvenc, I.; Chong, C. A Survey on TOA Based Wireless Localization and NLOS Mitigation Techniques. IEEE Commun. Surv. Tutor. 2009, 11, 107–124. [Google Scholar] [CrossRef]
- Bahl, P.; Padmanabhan, V.N. RADAR: An in-building RF-based user location and tracking system. In Proceedings of the IEEE INFOCOM 2000, Conference on Computer Communications, Nineteenth Annual Joint Conference of the IEEE Computer and Communications Societies (Cat. No.00CH37064), Tel Aviv, Israel, 26–30 March 2000; Volume 2, pp. 775–784. [Google Scholar]
- Marques, N.; Meneses, F.; Moreira, A. Combining similarity functions and majority rules for multi-building, multi-floor, WiFi positioning. In Proceedings of the 2012 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sydney, Australia, 13–15 November 2012; pp. 1–9. [Google Scholar]
- Karmacharya, A.; Mendoza-Silva, G.M.; Torres-Sospedra, J. Sensor Fusion and Well Condition Triangle Approach forBLE-based Indoor Positioning. In Proceedings of the Tenth International Conference on Localization and GNSS (ICL-GNSS-WIP 2020) Co-Located with the Tenth International Conference on Indoor Positioning and Indoor Navigation (ICL-GNSS 2020), Tampere, Finland, 2–4 June 2020. [Google Scholar]
- Moreira, A.; Meneses, F. Where@UM-Dependable organic radio maps. In Proceedings of the 2015 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Banff, AB, Canada, 13–16 October 2015; pp. 1–9. [Google Scholar]
- Zeinalipour-Yazti, D.; Laoudias, C. The anatomy of the anyplace indoor navigation service. SIGSPATIAL Spec. 2017, 9, 3–10. [Google Scholar] [CrossRef] [Green Version]
- Noh, Y.; Yamaguchi, H.; Lee, U. Infrastructure-Free Collaborative Indoor Positioning Scheme for Time-Critical Team Operations. IEEE Trans. Syst. Man Cybern. Syst. 2018, 48, 418–432. [Google Scholar] [CrossRef]
- Pérez-Navarro, A.; Torres-Sospedra, J.; Montoliu, R.; Conesa, J.; Berkvens, R.; Caso, G.; Costa, C.; Dorigatti, N.; Hernández, N.; Knauth, S.; et al. 1-Challenges of Fingerprinting in Indoor Positioning and Navigation. In Geographical and Fingerprinting Data to Create Systems for Indoor Positioning and Indoor/Outdoor Navigation; Conesa, J., Pérez-Navarro, A., Torres-Sospedra, J., Montoliu, R., Eds.; Intelligent Data-Centric Systems, Academic Press: Cambridge, MA, USA, 2019; pp. 1–20. [Google Scholar] [CrossRef]
- Kasmi, Z.; Norrdine, A.; Blankenbach, J. Platform Architecture for Decentralized Positioning Systems. Sensors 2017, 17, 957. [Google Scholar] [CrossRef] [Green Version]
- Chen, Y.; Guo, M.; Shen, J.; Cao, J. GraphLoc: A graph-based method for indoor subarea localization with zero-configuration. Pers. Ubiquitous Comput. 2017, 21, 489–505. [Google Scholar] [CrossRef]
- Merry, L.A.; Faragher, R.M.; Scheding, S. Comparison of Opportunistic Signals for Localisation. IFAC Proc. Vol. 2010, 43, 109–114. [Google Scholar] [CrossRef] [Green Version]
- Weyn, M.; Klepal, M.; Widyawan. Adaptive Motion Model for a Smart Phone Based Opportunistic Localization System. In Mobile Entity Localization and Tracking in GPS-Less Environnments; Fuller, R., Koutsoukos, X.D., Eds.; Springer: Berlin/Heidelberg, Germany, 2009; pp. 50–65. [Google Scholar]
- Robinson, M.; Ghrist, R. Topological Localization Via Signals of Opportunity. IEEE Trans. Signal Process. 2012, 60, 2362–2373. [Google Scholar] [CrossRef]
- Sakpere, W.; Adeyeye-Oshin, M.; Mlitwa, N.B. A state-of-the-art survey of indoor positioning and navigation systems and technologies. S. Afr. Comput. J. 2017, 29, 145–197. [Google Scholar] [CrossRef] [Green Version]
- Nessa, A.; Adhikari, B.; Hussain, F.; Fernando, X.N. A Survey of Machine Learning for Indoor Positioning. IEEE Access 2020, 8, 214945–214965. [Google Scholar] [CrossRef]
- Yassin, A.; Nasser, Y.; Awad, M.; Al-Dubai, A.; Liu, R.; Yuen, C.; Raulefs, R.; Aboutanios, E. Recent Advances in Indoor Localization: A Survey on Theoretical Approaches and Applications. IEEE Commun. Surv. Tutor. 2017, 19, 1327–1346. [Google Scholar] [CrossRef] [Green Version]
- Ye, Y.; Wang, B. RMapCS: Radio Map Construction From Crowdsourced Samples for Indoor Localization. IEEE Access 2018, 6, 24224–24238. [Google Scholar] [CrossRef]
- Hernández, N.; Ocaña, M.; Alonso, J.M.; Kim, E. Continuous Space Estimation: Increasing WiFi-Based Indoor Localization Resolution without Increasing the Site-Survey Effort. Sensors 2017, 17, 147. [Google Scholar] [CrossRef] [PubMed]
- Pendão, C.; Moreira, A. FastGraph Enhanced: High Accuracy Automatic Indoor Navigation and Mapping. IEEE Trans. Mob. Comput. 2019. [Google Scholar] [CrossRef]
- Caso, G.; De Nardis, L.; Lemic, F.; Handziski, V.; Wolisz, A.; Benedetto, M.D. ViFi: Virtual Fingerprinting WiFi-Based Indoor Positioning via Multi-Wall Multi-Floor Propagation Model. IEEE Trans. Mob. Comput. 2020, 19, 1478–1491. [Google Scholar] [CrossRef] [Green Version]
- Keskin, M.; Erdem, O.; Gezici, S. Cooperative Localization in Hybrid Infrared/Visible Light Networks: Theoretical Limits and Distributed Algorithms. IEEE Trans. Signal Inf. Process. Netw. 2019, 5, 181–197. [Google Scholar] [CrossRef] [Green Version]
- Wymeersch, H.; Lien, J.; Win, M.Z. Cooperative Localization in Wireless Networks. Proc. IEEE 2009, 97, 427–450. [Google Scholar] [CrossRef]
- Khandker, S.; Torres-Sospedra, J.; Ristaniemi, T. Improving RF fingerprinting methods by means of D2D communication protocol. Electronics 2019, 8, 97. [Google Scholar] [CrossRef] [Green Version]
- Ma, Y.; Tian, C.; Jiang, Y. A Multitag Cooperative Localization Algorithm Based on Weighted Multidimensional Scaling for Passive UHF RFID. IEEE Internet Things J. 2019, 6, 6548–6555. [Google Scholar] [CrossRef]
- Yu, S.; Su, X.; Zeng, J.; Cui, H. Mobility assisted wireless sensor network cooperative localization via SOCP. Lect. Notes Inst. Comput. Sci. Soc. Inf. Telecommun. Eng. 2019, 258, 129–138. [Google Scholar] [CrossRef]
- Leung, K.Y.K.; Barfoot, T.D.; Liu, H.H.T. Distributed and decentralized cooperative simultaneous localization and mapping for dynamic and sparse robot networks. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 3841–3847. [Google Scholar]
- Chan, L.W.; Chiang, J.R.; Chen, Y.C.; Ke, C.N.; Hsu, J.; Chu, H.H. Collaborative localization: Enhancing WiFi-based position estimation with neighborhood links in clusters. Lect. Notes Comput. Sci. (Incl. Subser. Lect. Notes Artif. Intell. Lect. Notes Bioinform.) 2006, 3968, 50–66. [Google Scholar]
- Cheolsu, S.; Namhyun, Y.; Wonjung, K. Positioning system using dynamic location-convergence adjustment factor for wireless LAN infrastructures. In Proceedings of the Sixth IEEE International Conference on Computer and Information Technology (CIT), Seoul, Korea, 20–22 September 2006. [Google Scholar] [CrossRef]
- Rosa, F.; Wardana, S.; Mayorga, C.; Simone, G.; Raynal, M.; Figueiras, J.; Frattasi, S. Experimental activity on cooperative mobile positioning in indoor environments. In Proceedings of the 2007 IEEE International Symposium on a World of Wireless, Mobile and Multimedia Networks (WOWMOM), Espoo, Finland, 18–21 June 2007. [Google Scholar] [CrossRef]
- Alsindi, N.; Pahlavan, K.; Alavi, B. An error propagation aware algorithm for precise cooperative indoor localization. In Proceedings of the IEEE Military Communications Conference MILCOM, Washington, DC, USA, 23–25 October 2006. [Google Scholar] [CrossRef]
- Chen, J.; Ma, X. Neighbor-assisted location calibration mechanism in wireless network. In Proceedings of the GLOBECOM-IEEE Global Telecommunications Conference, Honolulu, HI, USA, 30 November–4 December 2009. [Google Scholar] [CrossRef]
- Della Rosa, F.; Paakki, T.; Leppäkoski, H.; Nurmi, J. A cooperative framework for path loss calibration and indoor mobile positioning. In Proceedings of the 2010 7th Workshop on Positioning, Navigation and Communication (WPNC’10), Dresden, Germany, 11–12 March 2010; pp. 86–92. [Google Scholar] [CrossRef]
- Li, X. Collaborative multi-sensor tracking in mobile wireless sensor networks. Int. J. Sens. Netw. 2010, 8, 233–246. [Google Scholar] [CrossRef]
- Hadzic, S.; Rodriguez, J. Utility based node selection scheme for cooperative localization. In Proceedings of the 2011 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Guimaraes, Portugal, 21–23 September 2011. [Google Scholar] [CrossRef]
- Bittins, B.; Sieck, J. Multisensor and collaborative localization for diverse environments. In Proceedings of the UKSim 5th European Modelling Symposium on Computer Modelling and Simulation (EMS), Madrid, Spain, 16–18 November 2011; pp. 406–411. [Google Scholar] [CrossRef]
- Kloch, K.; Pirkl, G.; Lukowicz, P.; Fischer, C. Emergent behaviour in collaborative indoor localisation: An example of self-organisation in ubiquitous sensing systems. Lect. Notes Comput. Sci. (Incl. Subser. Lect. Notes Artif. Intell. Lect. Notes Bioinform.) 2011, 207–218. [Google Scholar] [CrossRef]
- Raulefs, R.; Zhang, S.; Mensing, C.; Ghali, C.; Hachem, J. Dynamic cooperative positioning. In Proceedings of the 17th European Wireless Conference 2011, Vienna, Austria, 27–29 April 2011; pp. 639–643. [Google Scholar]
- Giorgetti, G.; Farley, R.; Chikkappa, K.; Ellis, J.; Kaleas, T. Cortina: Collaborative indoor positioning using low-power sensor networks. In Proceedings of the 2011 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Guimaraes, Portugal, 21–23 September 2011. [Google Scholar] [CrossRef]
- Papapostolou, A.; Xiao, W.; Chaouchi, H. Cooperative fingerprint-based indoor localization using Self-Organizing Maps. In Proceedings of the IWCMC 2011—7th International Wireless Communications and Mobile Computing Conference, Istanbul, Turkey, 4–8 July 2011; pp. 1814–1819. [Google Scholar] [CrossRef]
- Van De Velde, S.; Wymeersch, H.; Meissner, P.; Witrisal, K.; Steendam, H. Cooperative multipath-aided indoor localization. In Proceedings of the IEEE Wireless Communications and Networking Conference (WCNC), Paris, France, 1–4 April 2012; pp. 3107–3111. [Google Scholar] [CrossRef] [Green Version]
- Lee, S.; Shin, H.; Cha, H. A pedestrian tracking system using group mobility information. In Proceedings of the IEEE Military Communications Conference MILCOM, Orlando, FL, USA, 29 October–1 November 2012. [Google Scholar] [CrossRef]
- Jun, J.; Gu, Y.; Cheng, L.; Lu, B.; Sun, J.; Zhu, T.; Niu, J. Social-Loc: Improving indoor localization with social sensing. In Proceedings of SenSys 2013-Proceedings of the 11th ACM Conference on Embedded Networked Sensor Systems; ACM: Cambridge, MA, USA, 2013. [Google Scholar] [CrossRef]
- Froehle, M.; Leitinger, E.; Meissner, P.; Witrisal, K. Cooperative multipath-assisted indoor navigation and tracking (Co-MINT) using UWB signals. In Proceedings of the 2013 IEEE International Conference on Communications Workshops (ICC), Budapest, Hungary, 9–13 June 2013; pp. 16–21. [Google Scholar] [CrossRef]
- Nilsson, J.O.; Zachariah, D.; Skog, I.; Handel, P. Cooperative localization by dual foot-mounted inertial sensors and inter-agent ranging. Eurasip J. Adv. Signal Process. 2013, 2013, 1–17. [Google Scholar] [CrossRef]
- Li, Y.T.; Chen, G.; Sun, M.T. An indoor collaborative pedestrian dead reckoning system. In Proceedings of the International Conference on Parallel Processing, Lyon, France, 1–4 October 2013; pp. 923–930. [Google Scholar] [CrossRef]
- Jing, H.; Pinchin, J.; Hill, C.; Moore, T. Wi-Fi indoor localisation based on collaborative ranging between mobile users. In Proceedings of the 26th International Technical Meeting of the Satellite Division of the Institute of Navigation, Nashville, TN, USA, 16–20 September 2013; Volume 2, pp. 1317–1324. [Google Scholar]
- Adewumi, O.; Zuva, T.; Ngwira, S. Simulation and calibration of rssi based distance estimation for localization in WSN. In Proceedings of the IASTED International Conference on Modelling and Simulation, Gaborone, Botswana, 1–2 September 2014; pp. 124–131. [Google Scholar] [CrossRef]
- Brassil, J. Improving indoor positioning accuracy with dense, cooperating beacons. Procedia Comput. Sci. 2014, 40, 1–8. [Google Scholar] [CrossRef] [Green Version]
- Morral, G.; Dieng, N. Cooperative RSSI-based indoor localization: B-MLE and distributed stochastic approximation. In Proceedings of the IEEE Vehicular Technology Conference, Vancouver, BC, Canada, 14–17 September 2014. [Google Scholar] [CrossRef]
- Olsson, F.; Rantakokko, J.; Nygards, J. Cooperative localization using a foot-mounted inertial navigation system and ultrawideband ranging. In Proceedings of the IPIN 2014—2014 International Conference on Indoor Positioning and Indoor Navigation, Busan, Korea, 27–30 October 2014; pp. 122–131. [Google Scholar] [CrossRef]
- Yang, Z.; Feng, X.; Zhang, Q. Adometer: Push the Limit of Pedestrian Indoor Localization through Cooperation. IEEE Trans. Mob. Comput. 2014, 13, 2473–2483. [Google Scholar] [CrossRef]
- Taniuchi, D.; Liu, X.; Nakai, D.; Maekawa, T. Spring Model Based Collaborative Indoor Position Estimation with Neighbor Mobile Devices. IEEE J. Sel. Top. Signal Process. 2015, 9, 268–277. [Google Scholar] [CrossRef]
- Li, S.; Hedley, M.; Collings, I.B. New Efficient Indoor Cooperative Localization Algorithm with Empirical Ranging Error Model. IEEE J. Sel. Areas Commun. 2015, 33, 1407–1417. [Google Scholar] [CrossRef]
- Wang, X.; Zhou, H.; Mao, S.; Pandey, S.; Agrawal, P.; Bevly, D.M. Mobility improves LMI-based cooperative indoor localization. In Proceedings of the 2015 IEEE Wireless Communications and Networking Conference (WCNC), New Orleans, LA, USA, 9–12 March 2015; pp. 2215–2220. [Google Scholar] [CrossRef]
- Cai, H.; Wu, G.; Chen, Y.; Jiang, L. Indoor collaborative localization method based on ultra-wideband ranging. In Proceedings of the 2015 9th European Conference on Antennas and Propagation (EuCAP), Lisbon, Portugal, 13–17 April 2015. [Google Scholar]
- Monir Vaghefi, R.; Amuru, S.; Buehrer, R. Improving mobile node tracking performance in NLOS environments using cooperation. In Proceedings of the IEEE International Conference on Communications, London, UK, 8–12 June 2015; pp. 6595–6600. [Google Scholar] [CrossRef]
- McDermott, K.; Vaghefi, R.; Buehrer, R. Cooperative UTDOA positioning in LTE cellular systems. In Proceedings of the 2015 IEEE Globecom Workshops (GC Wkshps 2015), San Diego, CA, USA, 6–10 December 2015. [Google Scholar] [CrossRef]
- Xiao, W.; Papapostolou, A.; Chaouchi, H.; Wei, M. Self-Organizing Map for Fingerprinting-Based Cooperative Localization in Dynamic Indoor Environments. Unmanned Syst. 2015, 3, 171–183. [Google Scholar] [CrossRef]
- Kolakowski, M.; Djaja-Josko, V. TDOA-TWR based positioning algorithm for UWB localization system. In Proceedings of the 2016 21st International Conference on Microwave, Radar and Wireless Communications (MIKON), Krakow, Poland, 9–11 May 2016. [Google Scholar] [CrossRef]
- Chen, L.; Yang, K.; Wang, X. Robust Cooperative Wi-Fi Fingerprint-Based Indoor Localization. IEEE Internet Things J. 2016, 3, 1406–1417. [Google Scholar] [CrossRef]
- Seco, F.; Jiménez, A.; Zheng, X. RFID-based centralized cooperative localization in indoor environments. In Proceedings of the 2016 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Alcala de Henares, Spain, 4–7 October 2016. [Google Scholar] [CrossRef]
- Qiu, J.W.; Tseng, Y.C. M2M Encountering: Collaborative Localization via Instant Inter-Particle Filter Data Fusion. IEEE Sens. J. 2016, 16, 5715–5724. [Google Scholar] [CrossRef]
- Li, Q.; Li, W.; Sun, W.; Li, J.; Liu, Z. Fingerprint and Assistant Nodes Based Wi-Fi Localization in Complex Indoor Environment. IEEE Access 2016, 4, 2993–3004. [Google Scholar] [CrossRef]
- Jing, H.; Pinchin, J.; Hill, C.; Moore, T. An Adaptive Weighting based on Modified DOP for Collaborative Indoor Positioning. J. Navig. 2016, 69, 225–245. [Google Scholar] [CrossRef]
- Ze, C.; Hua, M.; Chang-Hao, C.; Mei-Ping, W. Implement of cooperative navigation in pedestrian navigation based on distance restraint. In Proceedings of the CGNCC 2016—2016 IEEE Chinese Guidance, Navigation and Control Conference, Nanjing, China, 12–14 August 2017; pp. 2123–2127. [Google Scholar] [CrossRef]
- Vaghefi, R.M.; Buehrer, R.M. Cooperative Source Node Tracking in Non-Line-of-Sight Environments. IEEE Trans. Mob. Comput. 2017, 16, 1287–1299. [Google Scholar] [CrossRef]
- Karlsson, M.; Karlsson, F. Cooperative indoor positioning by exchange of bluetooth signals and state estimates between users. In Proceedings of the 2016 European Control Conference (ECC 2016), Aalborg, Denmark, 29 June–1 July 2017; pp. 1440–1444. [Google Scholar] [CrossRef] [Green Version]
- Chang, C.; Lee, G.; Lee, T. Cooperative indoor localization with ranging and orientation data. Chung Cheng Ling Hsueh Pao/J. Chung Cheng Inst. Technol. 2017, 46, 43–50. [Google Scholar]
- Morrison, A.; Sokolova, N.; Haavardsholm, T.; Hagen, O.; Opsahl, T.; Ånonsen, K.; Kapteinløytnant, E. Collaborative indoor navigation for emergency services personnel. In Proceedings of the IEEE Aerospace Conference Proceedings, Big Sky, MT, USA, 4–11 March 2017. [Google Scholar] [CrossRef]
- Tseng, P.; Lee, K. A Femto-Aided Location Tracking Algorithm in LTE—A Heterogeneous Networks. IEEE Trans. Veh. Technol. 2017, 66, 748–762. [Google Scholar] [CrossRef]
- Liu, Y.; Jiang, T.; Lu, Y.; Zhang, X.; Li, Y. Indoor collaborative localization using multiple micro-electro-mechanical system sensor nodes. ICIC Express Lett. Part B Appl. 2017, 8, 101–108. [Google Scholar]
- Zhu, J.; Kia, S. A Loosely Coupled Cooperative Localization Augmentation to Improve Human Geolocation in Indoor Environments. In Proceedings of the IPIN 2018—9th International Conference on Indoor Positioning and Indoor Navigation, Nantes, France, 24–27 September 2018. [Google Scholar] [CrossRef]
- Seco, F.; Jiménez, A. Smartphone-based cooperative indoor localization with RFID technology. Sensors 2018, 18, 266. [Google Scholar] [CrossRef] [Green Version]
- Hu, E.; Deng, Z.; Hu, M.; Yin, L.; Liu, W. Cooperative indoor positioning with factor graph based on FIM for wireless sensor network. Future Gener. Comput. Syst. 2018, 89, 126–136. [Google Scholar] [CrossRef]
- Liu, Z.; Dai, W.; Win, M.Z. Mercury: An Infrastructure-Free System for Network Localization and Navigation. IEEE Trans. Mob. Comput. 2018, 17, 1119–1133. [Google Scholar] [CrossRef]
- Mendrzik, R.; Bauch, G. Constrained stochastic inference for cooperative indoor localization. In Proceedings of the 2017 IEEE Global Communications Conference (GLOBECOM 2017), Singapore, 4–8 December 2017; pp. 1–6. [Google Scholar]
- Xiong, H.; Peng, M.; Gong, S.; Du, Z. A Novel Hybrid RSS and TOA Positioning Algorithm for Multi-Objective Cooperative Wireless Sensor Networks. IEEE Sens. J. 2018, 18, 9343–9351. [Google Scholar] [CrossRef]
- Geng, X.; Zhou, M.; Wei, Y.; Tang, Y. Indoor WLAN collaborative localization algorithm based on geometric figure overlap. In Communications, Signal Processing, and Systems. CSPS 2016. Lecture Notes in Electrical Engineering; Springer: Singapore, 2018; Volume 423, pp. 515–524. [Google Scholar] [CrossRef]
- Yang, F.; Gao, J.; Liu, Y. Indoor visible light positioning system based on cooperative localization. Opt. Eng. 2019, 58. [Google Scholar] [CrossRef] [Green Version]
- Lu, X.; Yang, K.; Liu, J.; Yang, C.; Zhang, Z.; Zhang, H. Indoor Collaborative Positioning with Adaptive Particle-Pair Filtering Based on Dynamic User Pairing. IEEE Access 2019, 7, 5795–5807. [Google Scholar] [CrossRef]
- Gazzah, L.; Najjar, L. Enhanced cooperative group localization with identification of LOS/NLOS BSs in 5G dense networks. Ad Hoc Netw. 2019, 89, 88–96. [Google Scholar] [CrossRef]
- Zhao, T.; Zhao, K.; Yu, C.; Dong, D.; Zheng, Z.; Zhang, Y. Application of Differential Time Synchronization in Indoor Positioning. In Proceedings of the 2019 11th International Conference on Wireless Communications and Signal Processing (WCSP), Xi’an, China, 23–25 October 2019; pp. 1–6. [Google Scholar]
- Wang, T.; Zhao, H.; Shen, Y. High-accuracy localization using single-anchor ultra-wide bandwidth systems. In Proceedings of the 2019 IEEE/CIC International Conference on Communications in China (ICCC), Changchun, China, 11–13 August 2019; pp. 59–63. [Google Scholar]
- Gabela, J.; Retscher, G.; Goel, S.; Perakis, H.; Masiero, A.; Toth, C.; Gikas, V.; Kealy, A.; Koppànyi, Z.; Błaszczak-Bąk, W.; et al. Experimental Evaluation of a UWB-Based Cooperative Positioning System for Pedestrians in GNSS-Denied Environment. Sensors 2019, 19, 5274. [Google Scholar] [CrossRef] [Green Version]
- Morrison, A.; Ruotsalainen, L.; Mäkelä, M.; Rantanen, J.; Sokolova, N. Combining visual, pedestrian, and collaborative navigation techniques for team based infrastructure free indoor navigation. In Proceedings of the 32nd International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS+ 2019), Miami, FL, USA, 16–20 September 2019; pp. 2692–2701. [Google Scholar] [CrossRef] [Green Version]
- Wang, C.; Luo, J.; He, Q. A Cooperative Indoor Localization Enhancement Framework on Edge Computing Platforms for Safety-Critical Applications. In Proceedings of the 2019 15th International Conference on Mobile Ad-Hoc and Sensor Networks (MSN), Shenzhen, China, 11–13 December 2019; pp. 372–377. [Google Scholar]
- Ho, Y.H.; Chan, H.C. Decentralized adaptive indoor positioning protocol using Bluetooth Low Energy. Comput. Commun. 2020, 159, 231–244. [Google Scholar] [CrossRef]
- Jung, J.; Choi, Y.; Kwon, Y. Location-Aware Point-to-Point RPL in Indoor IR-UWB Networks. Electronics 2020, 9, 861. [Google Scholar] [CrossRef]
- Li, X.; Shao, Y.; Zhao, F. An Indoor Positioning Approach Using Smartphone Based on PDR and EKF. In Proceedings of the 2020 15th IEEE Conference on Industrial Electronics and Applications (ICIEA), Kristiansand, Norway, 9–13 November 2020; pp. 182–187. [Google Scholar]
- Liu, R.; Yuen, C.; Do, T.N.; Zhang, M.; Guan, Y.L.; Tan, U.X. Cooperative positioning for emergency responders using self IMU and peer-to-peer radios measurements. Inf. Fus. 2020, 56, 93–102. [Google Scholar] [CrossRef]
- Sakr, M.; Masiero, A.; El-Sheimy, N. LocSpeck: A Collaborative and Distributed Positioning System for Asymmetric Nodes Based on UWB Ad-Hoc Network and Wi-Fi Fingerprinting. Sensors 2020, 20, 78. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Shalaby, M.; Shokair, M.; Messiha, N.W. RSS Cooperative Localization in WSNs Operating in the Millimeter Bands. Wirel. Pers. Commun. 2020, 115, 2327–2334. [Google Scholar] [CrossRef]
- Ta, V.C.; Dao, T.K.; Vaufreydaz, D.; Castelli, E. Collaborative Smartphone-Based User Positioning in a Multiple-User Context Using Wireless Technologies. Sensors 2020, 20, 405. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kulmer, J.; Leitinger, E.; Meissner, P.; Witrisal, K. Cooperative multipath-assisted navigation and tracking: A low-complexity approach. Lect. Notes Inst. Comput. Sci. Soc. Inf. Telecommun. Eng. 2015, 159, 159–165. [Google Scholar] [CrossRef]
- Alippi, C.; Vanini, G. A RSSI-based and calibrated centralized localization technique for wireless sensor networks. In Proceedings of the Fourth Annual IEEE International Conference on Pervasive Computing and Communications Workshops (PERCOMW’06), Pisa, Italy, 13–17 March 2006; pp. 5–305. [Google Scholar]
- Wang, H.; Wan, J.; Liu, R. A Novel Ranging Method Based on RSSI. Energy Procedia 2011, 12, 230–235. [Google Scholar] [CrossRef] [Green Version]
- Blumrosen, G.; Hod, B.; Anker, T.; Dolev, D.; Rubinsky, B. Enhanced calibration technique for RSSI-based ranging in body area networks. Ad Hoc Netw. 2013, 11, 555–569. [Google Scholar] [CrossRef]
- Liang, P.; Krause, P. Smartphone-Based Real-Time Indoor Location Tracking with 1-m Precision. IEEE J. Biomed. Health Inf. 2016, 20, 756–762. [Google Scholar] [CrossRef] [Green Version]
- Belmonte-Hernández, A.; Hernández-Peñaloza, G.; Álvarez, F.; Conti, G. Adaptive Fingerprinting in Multi-Sensor Fusion for Accurate Indoor Tracking. IEEE Sens. J. 2017, 17, 4983–4998. [Google Scholar] [CrossRef] [Green Version]
- Dwek, N.; Birem, M.; Geebelen, K.; Hostens, E.; Mishra, A.; Steckel, J.; Yudanto, R. Improving the Accuracy and Robustness of Ultra-Wideband Localization Through Sensor Fusion and Outlier Detection. IEEE Robot. Autom. Lett. 2020, 5, 32–39. [Google Scholar] [CrossRef]
- Li, W.; Su, Z.; Zhang, K.; Benslimane, A.; Fang, D. Defending malicious check-in using big data analysis of indoor positioning system: An access point selection approach. IEEE Trans. Netw. Sci. Eng. 2020, 7, 2642–2655. [Google Scholar] [CrossRef]
- Järvinen, K.; Leppäkoski, H.; Lohan, E.S.; Richter, P.; Schneider, T.; Tkachenko, O.; Yang, Z. PILOT: Practical privacy-preserving indoor localization using outsourcing. In Proceedings of the 2019 IEEE European Symposium on Security and Privacy (EuroS&P), Stockholm, Sweden, 17–19 June 2019; pp. 448–463. [Google Scholar]
- Zhang, T.; Chow, S.S.; Zhou, Z.; Li, M. Privacy-preserving Wi-Fi fingerprinting indoor localization. In International Workshop on Security; Springer: Berlin, Germany, 2016; pp. 215–233. [Google Scholar]
- Konstantinidis, A.; Chatzimilioudis, G.; Zeinalipour-Yazti, D.; Mpeis, P.; Pelekis, N.; Theodoridis, Y. Privacy-preserving indoor localization on smartphones. IEEE Trans. Knowl. Data Eng. 2015, 27, 3042–3055. [Google Scholar] [CrossRef]
- Cho, Y.; Ji, M.; Lee, Y.; Park, S. WiFi AP position estimation using contribution from heterogeneous mobile devices. In Proceedings of the 2012 IEEE/ION Position, Location and Navigation Symposium, Myrtle Beach, SC, USA, 24–26 April 2012; pp. 562–567. [Google Scholar]
- Mendoza-Silva, G.M.; Torres-Sospedra, J.; Huerta, J.; Montoliu, R.; Benítez, F.; Belmonte, O. Situation Goodness Method for Weighted Centroid-Based Wi-Fi APs Localization. In Progress in Location-Based Services 2016; Gartner, G., Huang, H., Eds.; Springer International Publishing: Cham, Switzerland, 2017; pp. 27–47. [Google Scholar]
- Georgiadou, Y.; de By, R.A.; Kounadi, O. Location Privacy in the Wake of the GDPR. ISPRS Int. J. Geo-Inf. 2019, 8, 157. [Google Scholar] [CrossRef] [Green Version]




| Gu et al. [55] (2009) | Mautz [19] (2012) | Basiri et al. [14] (2017) | Mendoza-Silva et al. [53] (2019) |
|---|---|---|---|
|
|
|
|
| Liu et al. [52] (2007) | Gu et al. [55] (2009) | Zafari et al. [54] (2019) | Mendoza-Silva et al. [53] (2019) |
|---|---|---|---|
|
|
|
|
| Güvenc and Chong [57] (2009) | He and Chan [56] (2016) | Yassin et al. [72] (2017) | Chen et al. [66] (2017) | |
|---|---|---|---|---|
In LOS scenarios
| In NLOS scenarios
|
|
|
|
| Research Question | Systematic Review Section |
|---|---|
| Research Question 1 | Results, Section 4.2 and Section 4.4 |
| Discussion, Section 5.1 and Section 5.2 | |
| Research Question 2 | Results, Section 4.4 |
| Discussion, Section 5.2 | |
| Research Question 3 | Results, Section 4.5 and Section 4.1 |
| Discussion, Section 5.3 | |
| Research Question 4 | Discussion, Section 5.4 |
| Conclusion, Section 6 |
| Method | Advantages | Disadvantages | |
|---|---|---|---|
| Non-Collaborative | PDR-based |
|
|
| Ranging |
|
| |
| RSSI-based |
|
| |
| Fingerprint-based |
|
| |
| k-NN |
|
| |
| Collaborative | P. Filter |
|
|
| Belief Propagation |
|
| |
| EKF |
|
| |
| Geom. Algorithm |
|
| |
| LS |
|
| |
| Trilateration |
|
|
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pascacio, P.; Casteleyn, S.; Torres-Sospedra, J.; Lohan, E.S.; Nurmi, J. Collaborative Indoor Positioning Systems: A Systematic Review. Sensors 2021, 21, 1002. https://doi.org/10.3390/s21031002
Pascacio P, Casteleyn S, Torres-Sospedra J, Lohan ES, Nurmi J. Collaborative Indoor Positioning Systems: A Systematic Review. Sensors. 2021; 21(3):1002. https://doi.org/10.3390/s21031002
Chicago/Turabian StylePascacio, Pavel, Sven Casteleyn, Joaquín Torres-Sospedra, Elena Simona Lohan, and Jari Nurmi. 2021. "Collaborative Indoor Positioning Systems: A Systematic Review" Sensors 21, no. 3: 1002. https://doi.org/10.3390/s21031002
APA StylePascacio, P., Casteleyn, S., Torres-Sospedra, J., Lohan, E. S., & Nurmi, J. (2021). Collaborative Indoor Positioning Systems: A Systematic Review. Sensors, 21(3), 1002. https://doi.org/10.3390/s21031002