
Lamb Wave Scattering Analysis for Interface Damage Detection between a Surface-Mounted Block and Elastic Plate

 ,
,  , , and
, , and
Abstract
:1. Introduction
2. Experimental Setup
3. Two-Dimensional Mathematical Model
3.1. Governing and Constitutive Equations
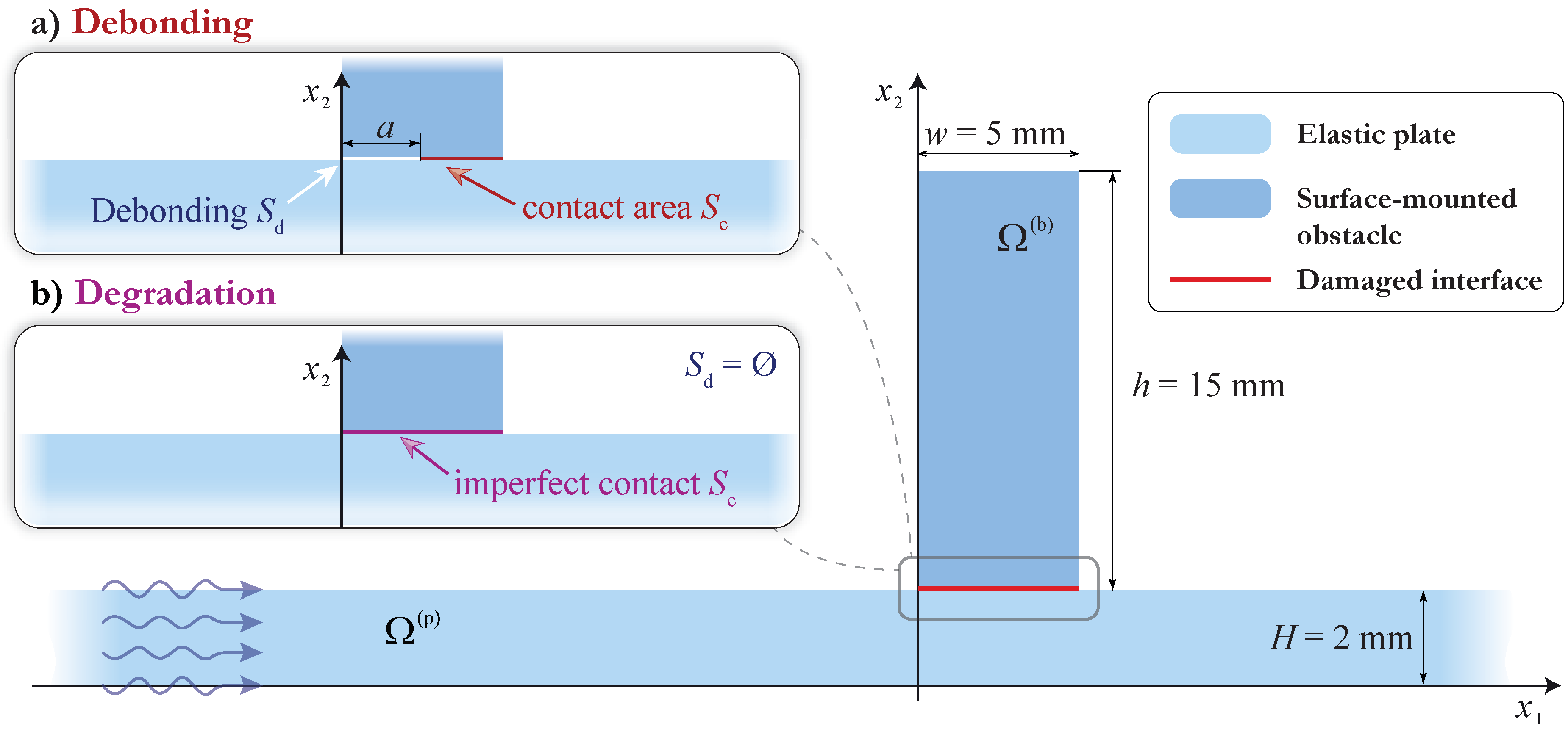
3.2. Mathematical Formulation of the Problem with a PWAT and Two Obstacles
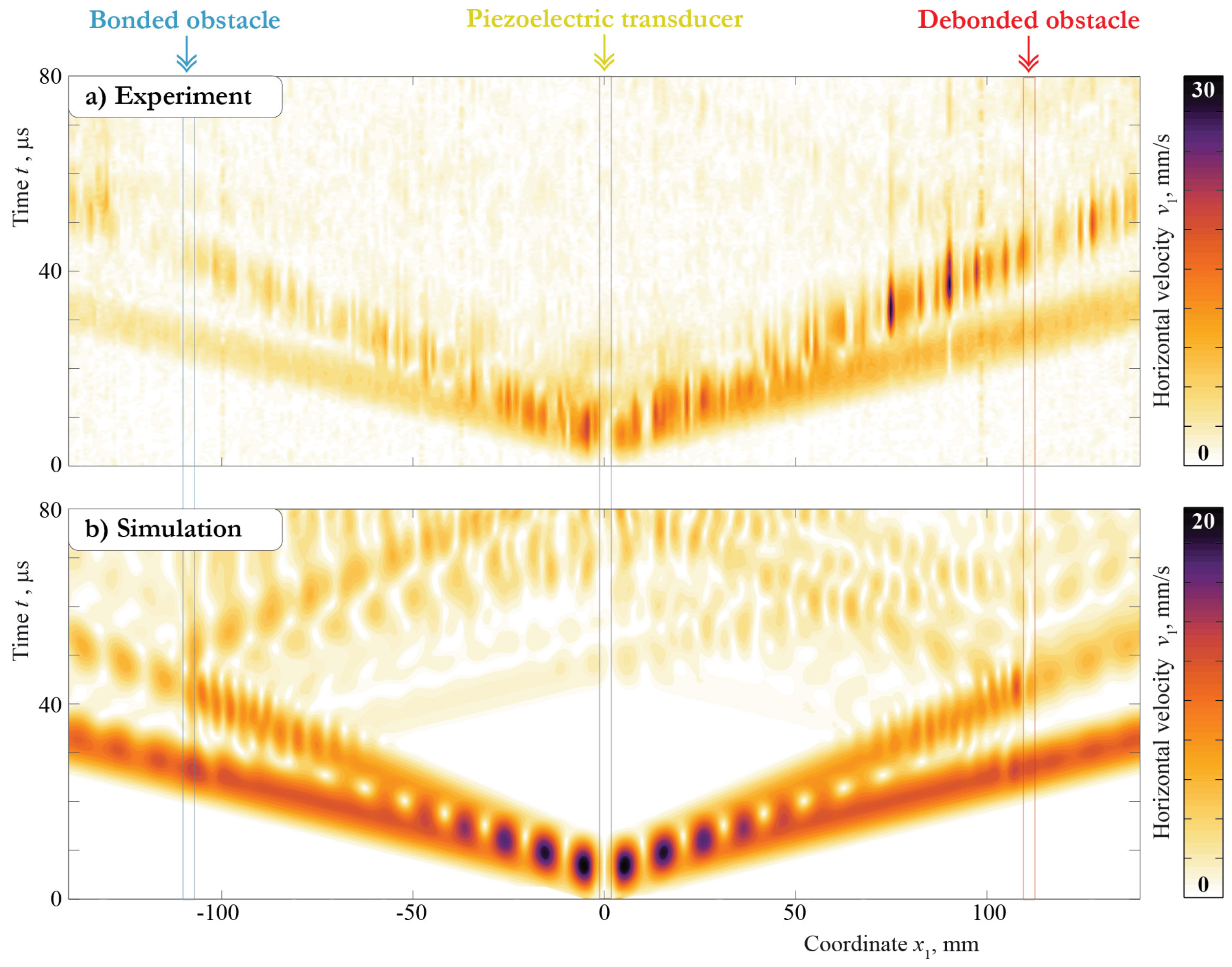
3.3. Experimental Verification of the Mathematical Model
4. Analysis: Wave Phenomena
4.1. Mathematical Formulation of the Problem for the Incidence of a Selected Lamb Wave
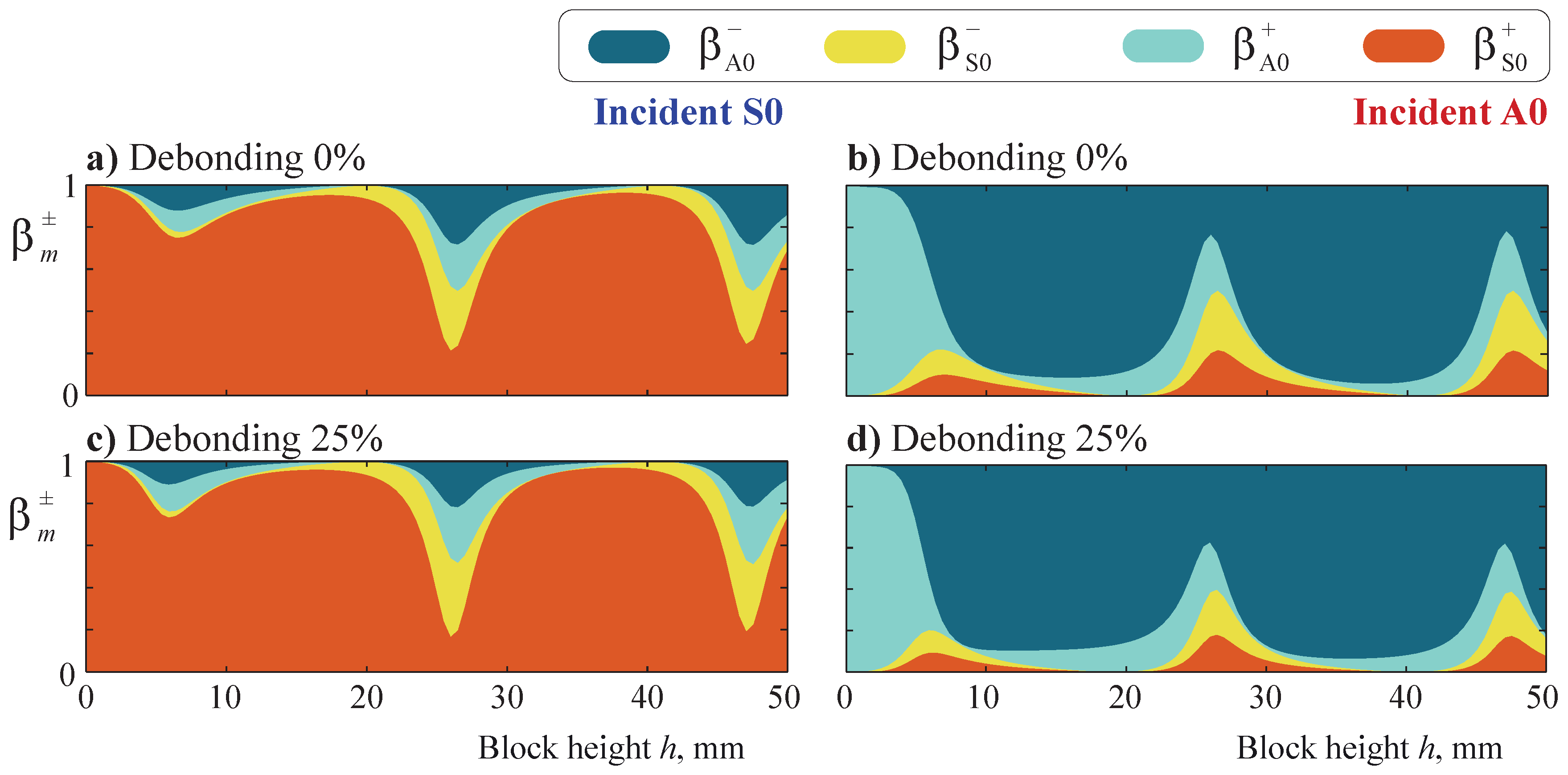
4.2. Debonding between the Obstacle and the Plate
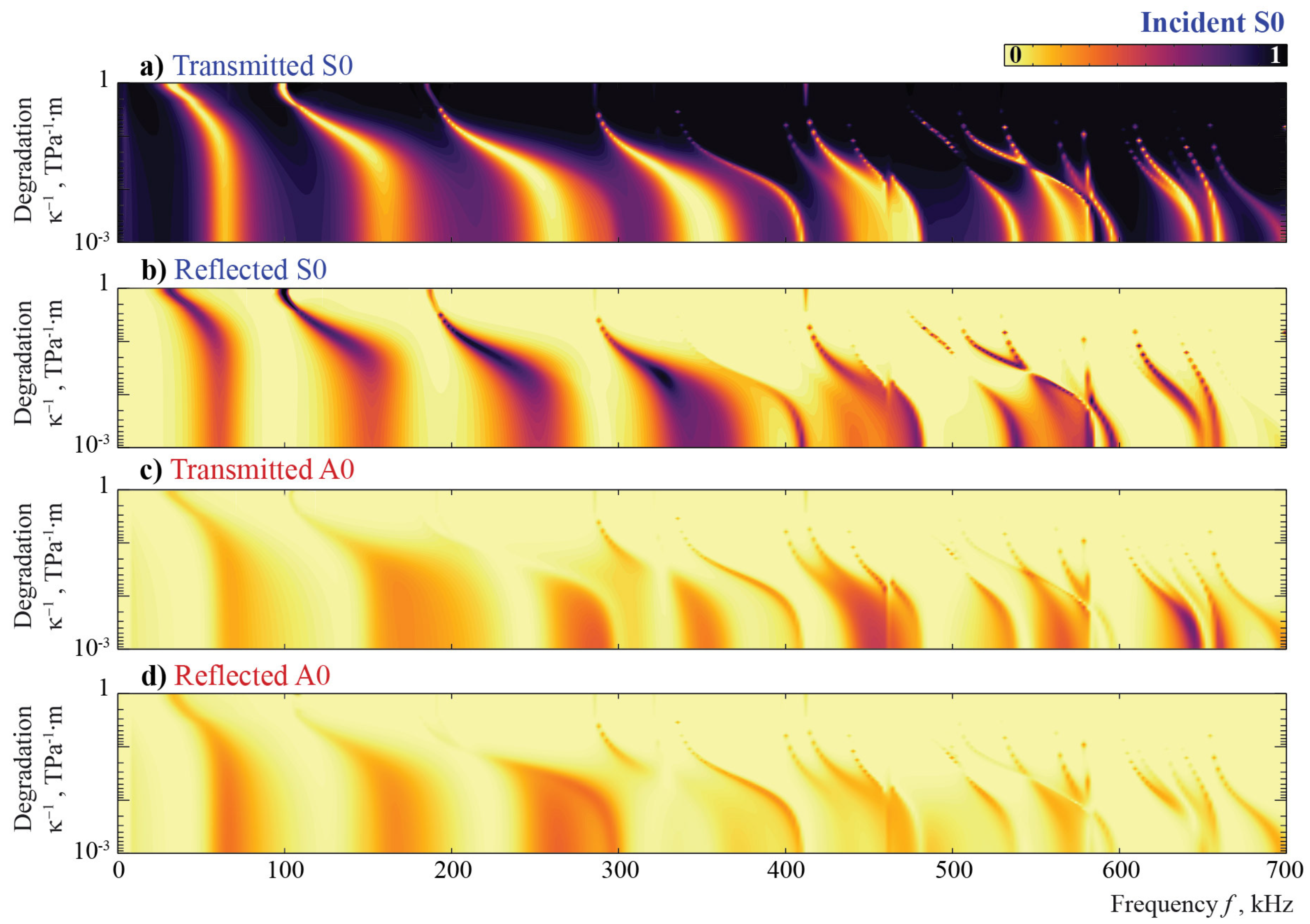
4.3. Adhesive Degradation between the Obstacle and the Plate (Imperfect Contact)
5. Analysis: Damage Detection
5.1. Mathematical Formulation of the Problem
5.2. Transient Signals and Damage Indices
5.2.1. Input Signals
5.2.2. Damage Indices
5.3. Effects of Obstacle Debonding (Crack between the Obstacle and the Plate)
5.4. Effects of Adhesive Degradation between the Obstacle and the Plate
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| FEM | Finite element method |
| GW | Guided wave |
| PWAT | Piezoelectric-wafer active transducer |
| DI | Damage index/indicator |
| SAHA | Semi-analytical hybrid approach |
| SBC | Spring boundary condition |
References
- Mueller, I.; Moll, J.; Tschöke, K.; Prager, J.; Kexel, C.; Schubert, L.; Lugovtsova, Y.; Bach, M.; Vogt, T. SHM using Guided Waves—Recent Activities and Advances in Germany. In Proceedings of the International Workshop on Structural Health Monitoring IWSHM, Stanford, CA, USA, 10–12 September 2019. [Google Scholar]
- Prager, J.; Vogt, T. Einsatz geführter Wellen für die Ultraschallprüfung und für SHM—Auswertung der Umfrageergebnisse des Unterausschusses “Geführte Wellen”. In Proceedings of the 22. Kolloquium Schallemission und 3. Anwenderseminar Zustandsüberwachung mit geführten Wellen, Karlsruhe, Germany, 27–28 March 2019. [Google Scholar]
- Li, J.; Lu, Y.; Lee, Y.F. Debonding detection in CFRP-reinforced steel structures using anti-symmetrical guided waves. Compos. Struct. 2020, 253, 112813. [Google Scholar] [CrossRef]
- Tian, Y.; Shen, Y. Selective guided wave mode transmission enabled by elastic metamaterials. J. Sound Vib. 2020, 485, 115566. [Google Scholar] [CrossRef]
- Wang, R.; Wu, Q.; Yu, F.; Okabe, Y.; Xiong, K. Nonlinear ultrasonic detection for evaluating fatigue crack in metal plate. Struct. Health Monit. 2019, 18, 869–881. [Google Scholar] [CrossRef]
- Eremin, A.A.; Golub, M.V.; Glushkov, E.V.; Glushkova, N.V. Identification of delamination based on the Lamb wave scattering resonance frequencies. NDT E Int. 2019, 103, 145–153. [Google Scholar] [CrossRef]
- Moll, J.; Kexel, C.; Kathol, J.; Fritzen, C.P.; Moix-Bonet, M.; Willberg, C.; Rennoch, M.; Koerdt, M.; Herrmann, A. Guided Waves for Damage Detection in Complex Composite Structures: The Influence of Omega Stringer and Different Reference Damage Size. Appl. Sci. 2020, 10, 3068. [Google Scholar] [CrossRef]
- Kralovec, C.; Schagerl, M. Review of Structural Health Monitoring Methods Regarding a Multi-Sensor Approach for Damage Assessment of Metal and Composite Structures. Sensors 2020, 20, 826. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Deutsche Gesellschaft für Zerstörungsfreie Prüfung. Standard. SHM 01—SHM with Guided Waves. 2014. Available online: https://www.beuth.de/de/technische-regel/dgzfp-shm-01/233142791 (accessed on 21 January 2021).
- Loendersloot, R.; Buethe, I.; Michaelidos, P.; Moix-Bonet, M.; Lampeas, G. Damage Identification in Composite Panel—Methodologies and Visualisation. In Proceedings of the Final Project Meeting and Conference, SARISTU, Moscow, Russia, 19–21 May 2015; pp. 579–604. [Google Scholar]
- Lowe, M.; Alleyne, D.; Cawley, P. Defect detection in pipes using guided waves. Ultrasonics 1998, 36, 147–154. [Google Scholar] [CrossRef]
- Su, Z.; Ye, L. Identification of Damage Using Lamb Waves: From Fundamentals to Applications; Springer: Berlin/Heidelberg, Germany, 2009. [Google Scholar]
- Si, L.; Wang, Q. Rapid Multi-Damage Identification for Health Monitoring of Laminated Composites Using Piezoelectric Wafer Sensor Arrays. Sensors 2016, 16, 638. [Google Scholar] [CrossRef] [Green Version]
- Memmolo, V.; Boffa, N.; Maio, L.; Monaco, E.; Ricci, F. Damage Localization in Composite Structures Using a Guided Waves Based Multi-Parameter Approach. Aerospace 2018, 5, 111. [Google Scholar] [CrossRef] [Green Version]
- Gaul, T.; Schubert, L.; Weihnacht, B.; Frankenstein, B. Localization of Defects in Pipes Using Guided Waves and Synthetic Aperture Focussing Technique (SAFT). In EWSHM—7th European Workshop on Structural Health Monitoring; Le Cam, V., Mevel, L., Schoefs, F., Eds.; IFFSTTAR, Inria; Université de Nantes: Nantes, France, 2014. [Google Scholar]
- Zhao, X.; Gao, H.; Zhang, G.; Ayhan, B.; Yan, F.; Kwan, C.; Rose, J.L. Active health monitoring of an aircraft wing with embedded piezoelectric sensor/actuator network: I. Defect detection, localization and growth monitoring. Smart Mater. Struct. 2007, 16, 1208–1217. [Google Scholar] [CrossRef]
- Golub, M.V.; Eremin, A.A.; Shpak, A.N.; Lammering, R. Lamb wave scattering, conversion and resonances in an elastic layered waveguide with a surface-bonded rectangular block. Appl. Acoust. 2019, 155, 442–452. [Google Scholar] [CrossRef]
- Ciminello, M.; Boffa, N.D.; Concilio, A.; Memmolo, V.; Monaco, E.; Ricci, F. Stringer debonding edge detection employing fiber optics by combined distributed strain profile and wave scattering approaches for non-model based SHM. Compos. Struct. 2019, 216, 58–66. [Google Scholar] [CrossRef]
- Memmolo, V.; Monaco, E.; Boffa, N.; Maio, L.; Ricci, F. Guided wave propagation and scattering for structural health monitoring of stiffened composites. Compos. Struct. 2018, 184, 568–580. [Google Scholar] [CrossRef]
- Sherafat, M.; Guitel, R.; Quaegebeur, N.; Lessard, L.; Hubert, P.; Masson, P. Guided wave scattering behavior in composite bonded assemblies. Compos. Struct. 2016, 136, 696–705. [Google Scholar] [CrossRef]
- Zhang, Y.; Yue, G.; Qi, L.; Rui, X. Research on continuous leakage location of stiffened structure based on frequency energy ratio mapping method. J. Phys. D Appl. Phys. 2020, 53. [Google Scholar] [CrossRef]
- Sellitto, A.; Saputo, S.; Russo, A.; Innaro, V.; Riccio, A.; Acerra, F.; Russo, S. Numerical-Experimental Investigation into the Tensile Behavior of a Hybrid Metallic–CFRP Stiffened Aeronautical Panel. Appl. Sci. 2020, 10, 1880. [Google Scholar] [CrossRef] [Green Version]
- Leckey, C.A.C.; Wheeler, K.R.; Hafiychuk, V.N.; Hafiychuk, H.; Timucin, D.A. Simulation of guided-wave ultrasound propagation in composite laminates: Benchmark comparisons of numerical codes and experiment. Ultrasonics 2018, 84, 187–200. [Google Scholar] [CrossRef]
- Leckey, C.A.C.; Rogge, M.D.; Miller, C.A.; Hinders, M.K. Multiple-mode Lamb wave scattering simulations using 3D elastodynamic finite integration technique. Ultrasonics 2012, 52, 193–207. [Google Scholar] [CrossRef]
- Luchinsky, D.G.; Hafiychuk, V.; Smelyanskiy, V.N.; Kessler, S.; Walker, J.; Miller, J.; Watson, M. Modeling wave propagation and scattering from impact damage for structural health monitoring of composite sandwich plates. Struct. Health Monit. 2013, 12, 296–308. [Google Scholar] [CrossRef]
- Zhang, Z.; Pan, H.; Wang, X.; Lin, Z. Machine Learning-Enriched Lamb Wave Approaches for Automated Damage Detection. Sensors 2020, 20, 1790. [Google Scholar] [CrossRef] [Green Version]
- Glushkov, E.; Glushkova, N.; Lammering, R.; Eremin, A.; Neumann, M.N. Lamb wave excitation and propagation in elastic plates with surface obstacles: Proper choice of central frequencies. Smart Mater. Struct. 2011, 20, 015020. [Google Scholar] [CrossRef]
- Lugovtsova, Y.; Bulling, J.; Boller, C.; Prager, J. Analysis of guided wave propagation in a multi-layered structure in view of structural health monitoring. Appl. Sci. 2019, 9, 4600. [Google Scholar] [CrossRef] [Green Version]
- Glushkov, E.V.; Glushkova, N.V.; Miakisheva, O.A. The distribution of air-coupled transducer energy among the traveling waves excited in a submerged elastic waveguide. Acoust. Phys. 2019, 65, 623–633. [Google Scholar] [CrossRef]
- Golub, M.V.; Shpak, A.N. Semi-analytical hybrid approach for the simulation of layered waveguide with a partially debonded piezoelectric structure. Appl. Math. Model. 2019, 65, 234–255. [Google Scholar] [CrossRef]
- Glushkov, E.V.; Glushkova, N.V. On the efficient implementation of the integral equation method in elastodynamics. J. Comput. Acoust. 2001, 9, 889–898. [Google Scholar] [CrossRef]
- Shi, L.; Liu, N.; Zhou, J.; Zhou, Y.; Wang, J.; Liu, Q. Spectral element method for band-structure calculations of 3D phononic crystals. J. Phys. D Appl. Phys. 2016, 49. [Google Scholar] [CrossRef]
- Willberg, C.; Duczek, S.; Vivar-Perez, J.M.; Schmicker, D.; Gabbert, U. Comparison of different higher order finite element schemes for the simulation of Lamb waves. Smart Struct. Syst. 2014, 13, 587–614. [Google Scholar] [CrossRef]
- Malik, M.; Chronopoulos, D.; Tanner, G. Transient ultrasonic guided wave simulation in layered composite structures using a hybrid wave and finite element scheme. Compos. Struct. 2020, 246, 112376. [Google Scholar] [CrossRef]
- Spada, A.; Capriotti, M.; Lanza di Scalea, F. Global-Local model for guided wave scattering problems with application to defect characterization in built-up composite structures. Int. J. Solids Struct. 2020, 182–183, 267–280. [Google Scholar] [CrossRef]
- Golub, M.V.; Boström, A. Interface damage modelled by spring boundary conditions for in-plane elastic waves. Wave Motion 2011, 48, 105–115. [Google Scholar] [CrossRef] [Green Version]
- Golub, M.V.; Doroshenko, O.V.; Boström, A. Effective spring boundary conditions for a damaged interface between dissimilar media in three-dimensional case. Int. J. Solids Struct. 2016, 81, 141–150. [Google Scholar] [CrossRef]
- Golub, M.V.; Doroshenko, O.V. Effective spring boundary conditions for modelling wave transmission through a composite with a random distribution of interface circular cracks. Int. J. Solids Struct. 2019, 165, 115–126. [Google Scholar] [CrossRef]
- Nayfeh, A.H. Wave Propagation in Layered Anisotropic Media with Applications to Composites; Elsevier Academic Press: Amsterdam, The Netherlands, 1995; p. 696. [Google Scholar]
- Schurr, D.P.; Kim, J.Y.; Sabra, K.G.; Jacobs, L.J. Damage detection in concrete using coda wave interferometry. NDT E Int. 2011, 44, 728–735. [Google Scholar] [CrossRef]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Material | Elastic Constants | Piezoelectric Constants | Dielectric Constants | Density |
|---|---|---|---|---|
| [GPa] | [] | [] | [] | |
| Aluminum | — | — | 2700 | |
| Epoxy film | — | — | 930 | |
| PIC 155 | 7800 | |||
| Debonding 0% | Debonding 25% | Debonding 50% | |||
|---|---|---|---|---|---|
| SAHA | FEM | SAHA | FEM | SAHA | FEM |
| 302.4−5.5i | 302.3−5.5i | 37.8−400.5i | 63.6−12.1i | ||
| 371.9−18.9i | 368.7−17.4i | 262.6−26.5i | 265.6−22.1i | 268.3−15.6i | |
| 416.9−2.1i | 416.9−2.1i | 284.2−202.2i | 316.5−8.9i | 331.8−1.9i | |
| 467.5−0.1i | 467.5−0.1i | 404.8−6.9i | 406.6−6.5i | 387.1−8.8i | 387.9−8.3i |
| 489.7−3.3i | 489.4−3.3i | 541.7−4.3i | 542.3−3.9i | 425.3−6.9i | 425.3−6.4i |
| 546.8−4.7i | 546.8−4.7i | 587.2−1.7i | 589.3−1.5i | 468.6−0.9i | 467.3−0.9i |
| 607.6−3.0i | 607.6−3.0i | 602.3−4.9i | 603.2−4.3i | 545.1−8.7i | 545.1−8.0i |
| 659.5−4.4i | 659.5−4.4i | 674.1−1.8i | 665.4−1.8i | 616.6−7.0i | 623.4−1.0i |
| 638.5−3.8i | 638.2−3.8i | ||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Golub, M.V.; Shpak, A.N.; Mueller, I.; Fomenko, S.I.; Fritzen, C.-P. Lamb Wave Scattering Analysis for Interface Damage Detection between a Surface-Mounted Block and Elastic Plate. Sensors 2021, 21, 860. https://doi.org/10.3390/s21030860
Golub MV, Shpak AN, Mueller I, Fomenko SI, Fritzen C-P. Lamb Wave Scattering Analysis for Interface Damage Detection between a Surface-Mounted Block and Elastic Plate. Sensors. 2021; 21(3):860. https://doi.org/10.3390/s21030860
Chicago/Turabian StyleGolub, Mikhail V., Alisa N. Shpak, Inka Mueller, Sergey I. Fomenko, and Claus-Peter Fritzen. 2021. "Lamb Wave Scattering Analysis for Interface Damage Detection between a Surface-Mounted Block and Elastic Plate" Sensors 21, no. 3: 860. https://doi.org/10.3390/s21030860
APA StyleGolub, M. V., Shpak, A. N., Mueller, I., Fomenko, S. I., & Fritzen, C. -P. (2021). Lamb Wave Scattering Analysis for Interface Damage Detection between a Surface-Mounted Block and Elastic Plate. Sensors, 21(3), 860. https://doi.org/10.3390/s21030860