
Design of a Sensitive Balloon Sensor for Safe Human–Robot Interaction

 ,
,  , and
, and {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
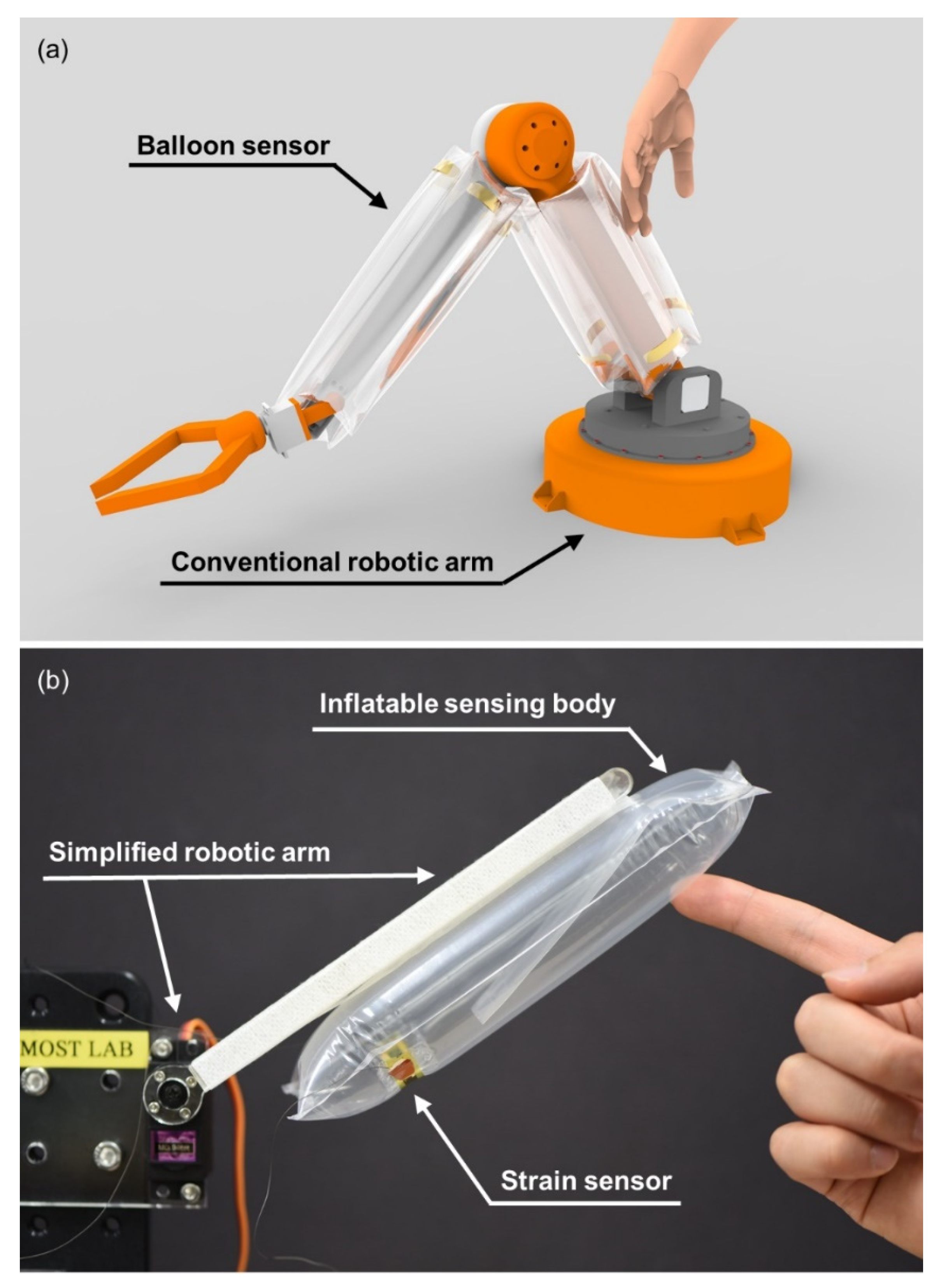
2. Fabrication and Design
2.1. Fabrication
2.2. Sensing Principle
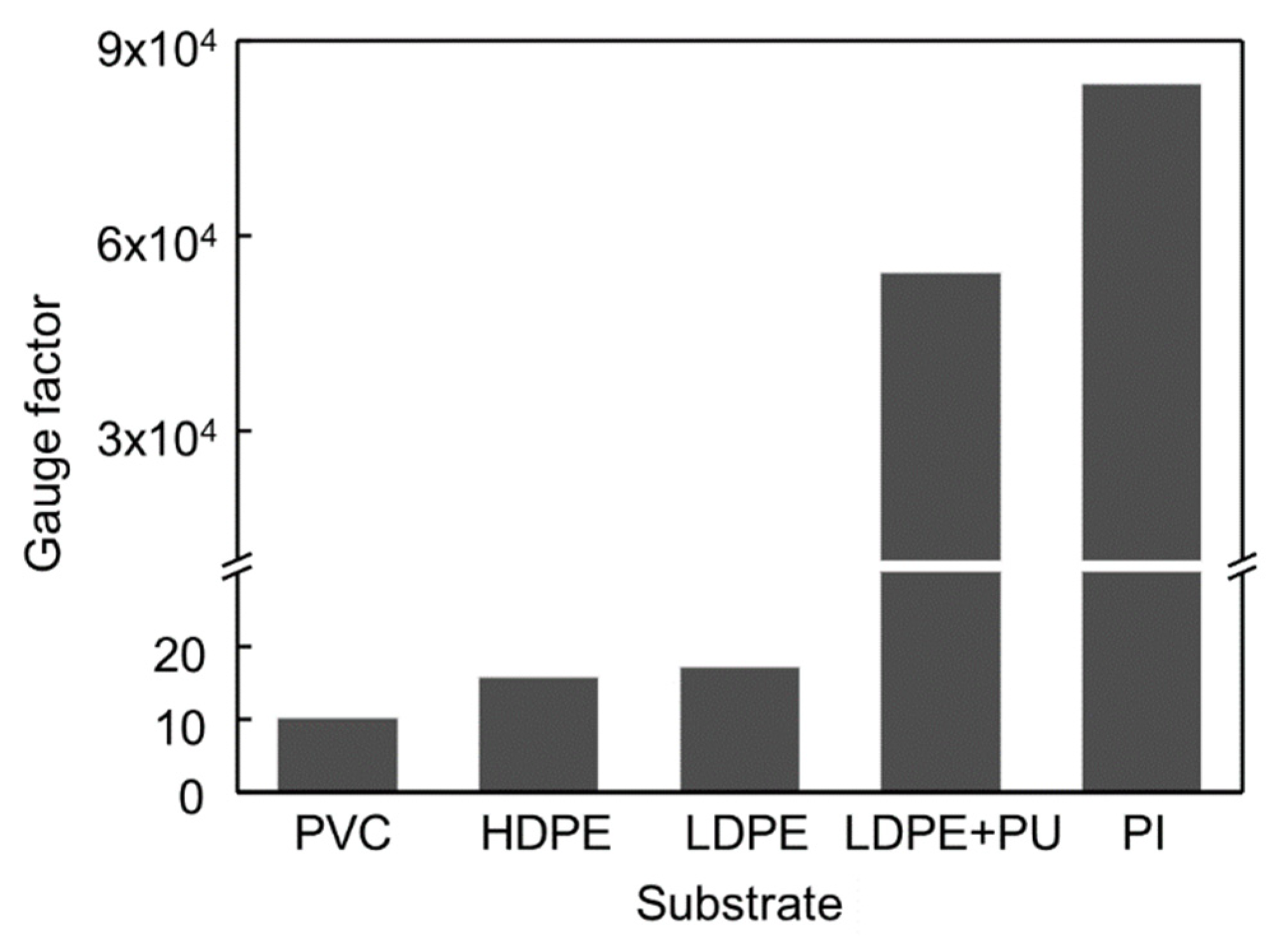
2.3. Crack-Based Strain Sensor
2.4. Customizable Inflatable Body
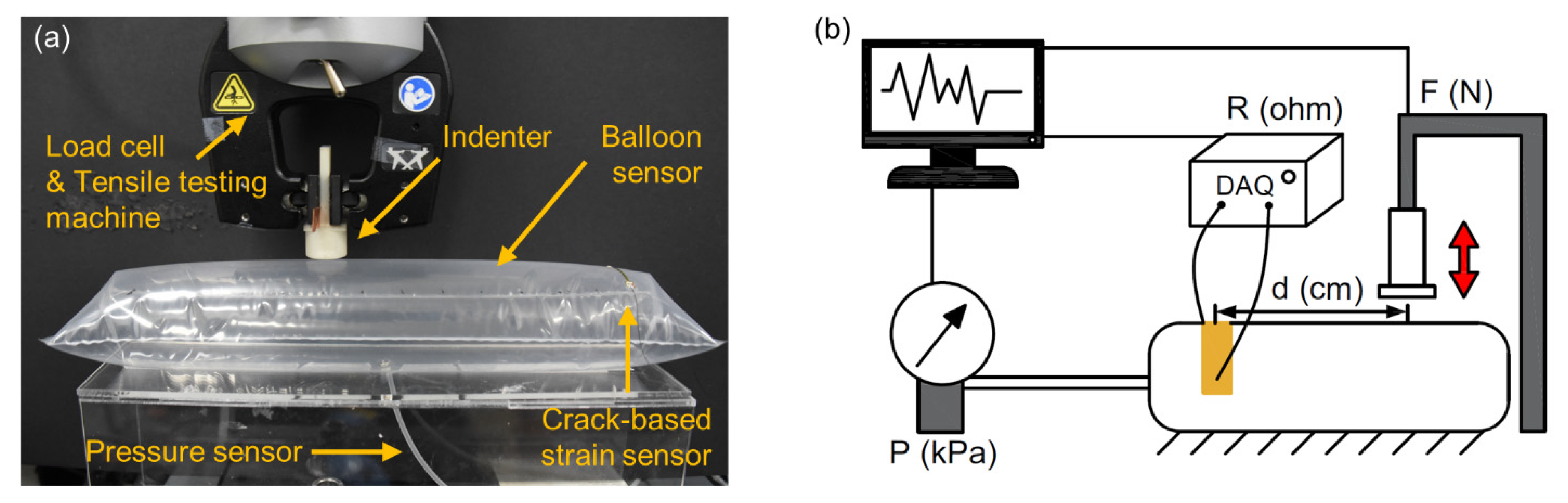
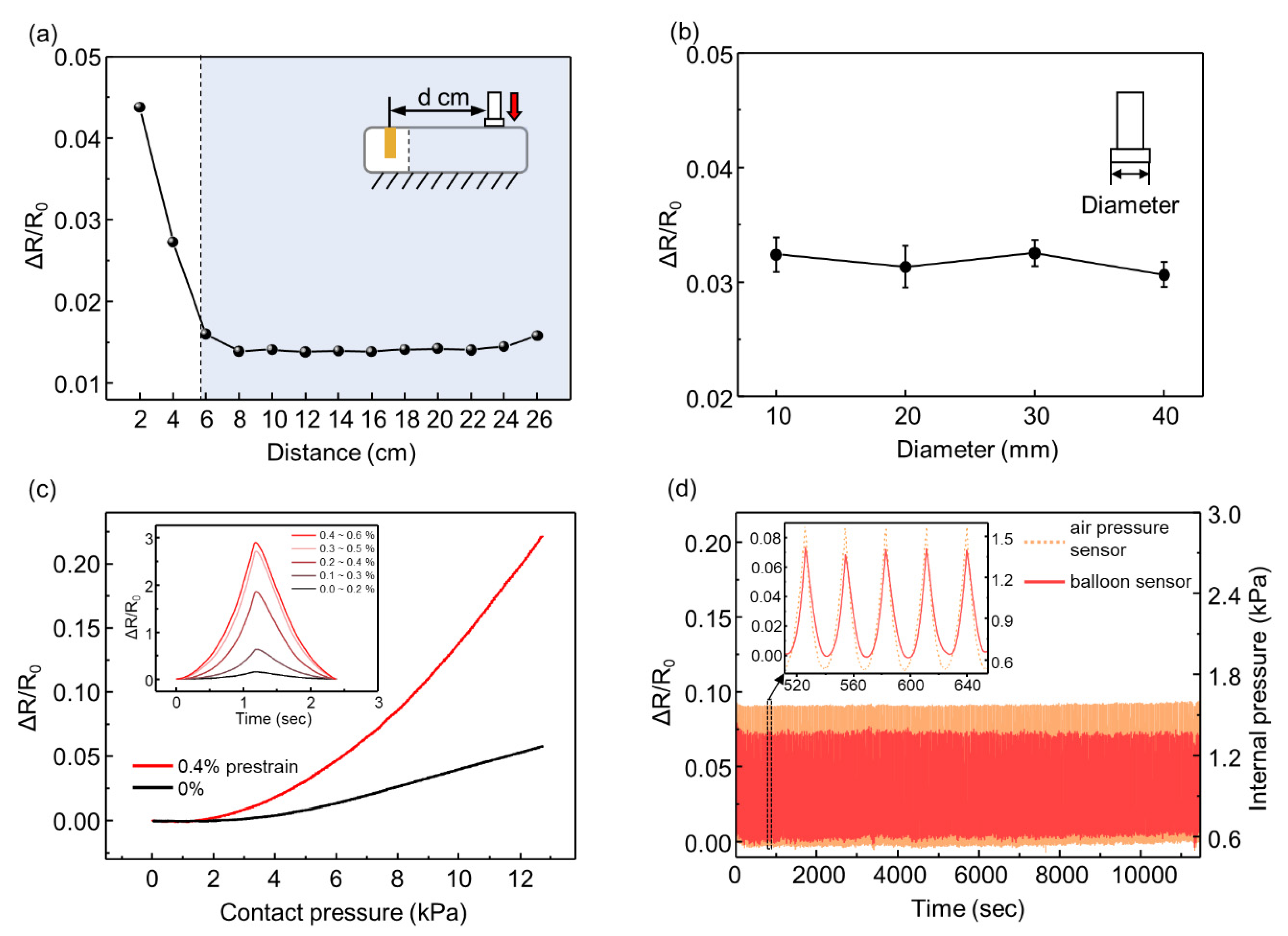
3. Experiments and Results
3.1. Response to Various Forces
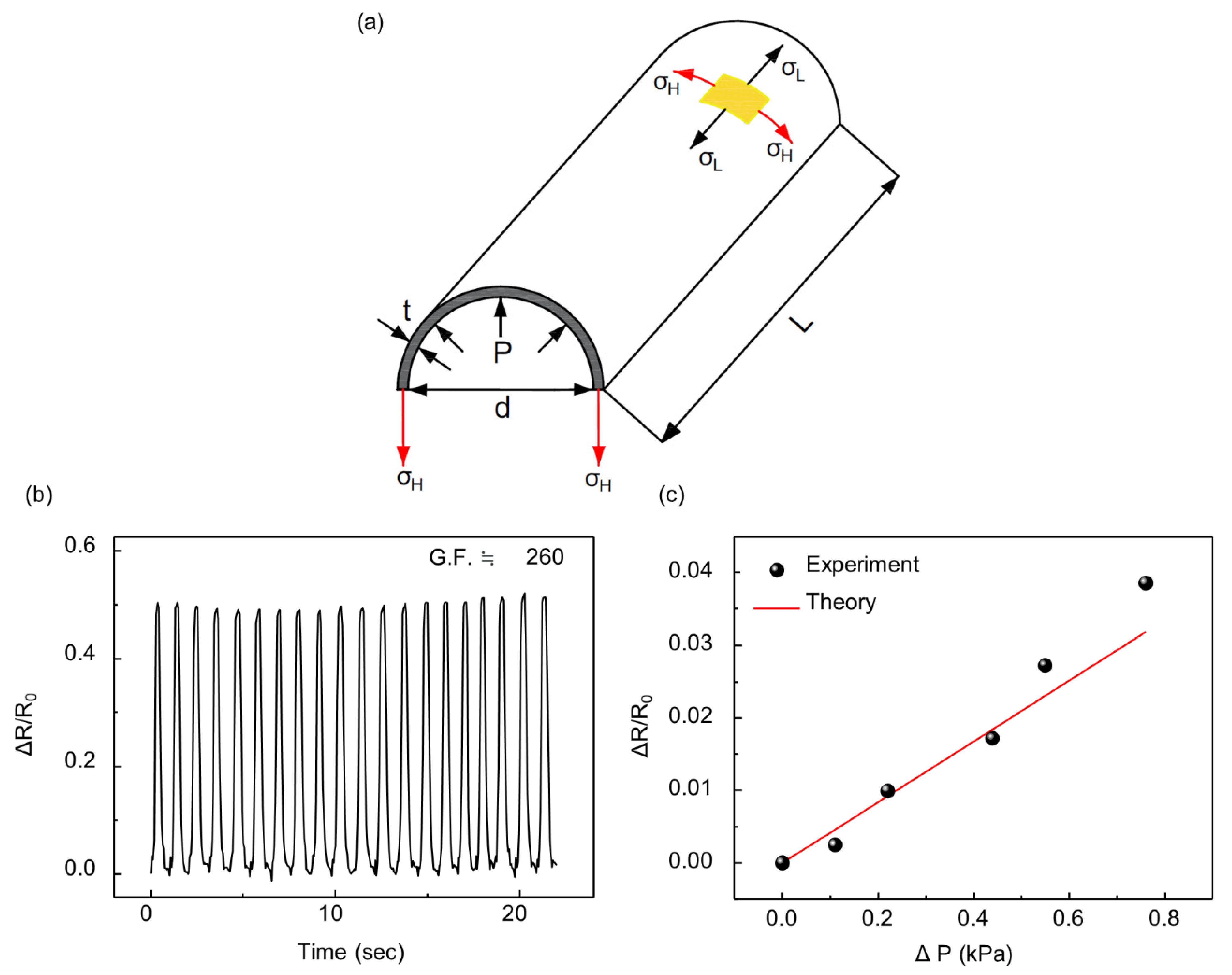
3.2. Modelling
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Heinzmann, J.; Zelinsky, A. Quantitative Safety Guarantees for Physical Human-Robot Interaction. Int. J. Rob. Res. 2003, 22, 479–504. [Google Scholar] [CrossRef]
- Haddadin, S.; Albu-Schäffer, A.; De Luca, A.; Hirzinger, G. Collision detection and reaction: A contribution to safe physical human-robot interaction. IEEE RSJ Int. Conf. Intell. Robot. Syst. Iros 2008, 3356–3363. [Google Scholar] [CrossRef] [Green Version]
- Michalos, G.; Makris, S.; Tsarouchi, P.; Guasch, T.; Kontovrakis, D.; Chryssolouris, G. Design considerations for safe human-robot collaborative workplaces. Proc. CiRP 2015, 37, 248–253. [Google Scholar] [CrossRef]
- Lasota, P.A.; Fong, T.; Shah, J.A. A Survey of Methods for Safe Human-Robot Interaction. Found. Trends Robot. 2017, 5, 261–349. [Google Scholar] [CrossRef]
- Zou, L.; Ge, C.; Wang, Z.J.; Cretu, E.; Li, X. Novel tactile sensor technology and smart tactile sensing systems: A review. Sensors 2017, 17, 2653. [Google Scholar] [CrossRef]
- Argall, B.D.; Billard, A.G. A survey of Tactile Human-Robot Interactions. Robot. Auton. Syst. 2010, 58, 1159–1176. [Google Scholar] [CrossRef] [Green Version]
- Dahiya, R.S.; Mittendorfer, P.; Valle, M.; Cheng, G.; Lumelsky, V.J. Directions toward effective utilization of tactile skin: A review. IEEE Sens. J. 2013, 13, 4121–4138. [Google Scholar] [CrossRef]
- Luo, S.; Bimbo, J.; Dahiya, R.; Liu, H. Robotic tactile perception of object properties: A review. Mechatronics 2017, 48, 54–67. [Google Scholar] [CrossRef] [Green Version]
- Huet, L.A.; Rudnicki, J.W.; Hartmann, M.J.Z. Tactile sensing with whiskers of various shapes: Determining the three-dimensional location of object contact based on mechanical signals at the whisker base. Soft Robot. 2017, 4, 88–102. [Google Scholar] [CrossRef] [PubMed]
- Wu, Y.; Liu, Y.; Zhou, Y.; Man, Q.; Hu, C.; Asghar, W.; Li, F.; Yu, Z.; Shang, J.; Liu, G.; et al. A skin-inspired tactile sensor for smart prosthetics. Sci. Robot. 2018, 3, eaat0429. [Google Scholar]
- Xie, H.; Liu, H.; Luo, S.; Seneviratne, L.D.; Althoefer, K. Fiber optics tactile array probe for tissue palpation during minimally invasive surgery. IEEE Int. Conf. Intell. Robot. Syst. 2013, 2539–2544. [Google Scholar] [CrossRef]
- Cirillo, A.; Ficuciello, F.; Natale, C.; Pirozzi, S.; Villani, L. A conformable force/tactile skin for physical human-robot interaction. IEEE Robot. Autom. Lett. 2016, 1, 41–48. [Google Scholar] [CrossRef]
- Kaltenbrunner, M.; Sekitani, T.; Reeder, J.; Yokota, T.; Kuribara, K.; Tokuhara, T.; Drack, M.; Schwödiauer, R.; Graz, I.; Bauer-Gogonea, S.; et al. An ultra-lightweight design for imperceptible plastic electronics. Nature 2013, 499, 458–463. [Google Scholar] [CrossRef]
- Ohmura, Y.; Kuniyoshi, Y.; Nagakubo, A. Conformable and scalable tactile sensor skin for a curved surfaces. Proc. IEEE Int. Conf. Robot. Autom. 2006, 2006, 1348–1353. [Google Scholar]
- Mittendorfer, P.; Cheng, G. Humanoid multimodal tactile-sensing modules. IEEE Trans. Robot. 2011, 27, 401–410. [Google Scholar] [CrossRef] [Green Version]
- O’Neill, J.; Lu, J.; Dockter, R.; Kowalewski, T. Practical, stretchable smart skin sensors for contact-aware robots in safe and collaborative interactions. Proc. IEEE Int. Conf. Robot. Autom. 2015, 2015, 624–629. [Google Scholar]
- Kim, T.; Park, J.; Yoon, S.J.; Kong, D.H.; Park, H.W.; Park, Y.L. Design of a lightweight inflatable sensing sleeve for increased adaptability and safety of legged robots. IEEE Int. Conf. Soft Robot. 2019, 257–264. [Google Scholar] [CrossRef]
- Ohta, P.; Valle, L.; King, J.; Low, K.; Yi, J.; Atkeson, C.G.; Park, Y.L. Design of a Lightweight Soft Robotic Arm using Pneumatic Artificial Muscles and Inflatable Sleeves. Soft Robot. 2018, 5, 204–215. [Google Scholar] [CrossRef] [Green Version]
- Kim, J.; Alspach, A.; Yamane, K. 3D printed soft skin for safe human-robot interaction. IEEE Int. Conf. Intell. Robot. Syst. 2015, 2419–2425. [Google Scholar] [CrossRef]
- Alspach, A.; Kim, J.; Yamane, K. Design and fabrication of a soft robotic hand and arm system. IEEE Int. Conf. Soft Robot. RoboSoft 2018, 369–375. [Google Scholar] [CrossRef]
- Alspach, A.; Kim, J.; Yamane, K. Design of a soft upper body robot for physical human-robot interaction. IEEE RAS Int. Conf. Hum. Robot. 2015, 290–296. [Google Scholar] [CrossRef]
- Hawkes, E.W.; Blumenschein, L.H.; Greer, J.D.; Okamura, A.M. A soft robot that navigates its environment through growth. Sci. Robot. 2017, 2, eaan3028. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ou, J.; Skouras, M.; Vlavianos, N.; Heibeck, F.; Cheng, C.-Y.; Peters, J.; Ishii, H. AeroMorph-Heat-sealing Inflatable Shape-change Materials for Interaction Design. Proc. Annu. Symp. Interface Softw. Technol. 2016, 121–132. [Google Scholar] [CrossRef]
- Amiri Moghadam, A.A.; Alaie, S.; Deb Nath, S.; Aghasizade Shaarbaf, M.; Min, J.K.; Dunham, S.; Mosadegh, B. Laser cutting as a rapid method for fabricating thin soft pneumatic actuators and robots. Soft Robot. 2018, 5, 443–451. [Google Scholar] [CrossRef]
- Takeichi, M.; Suzumori, K.; Endo, G.; Nabae, H. Development of Giacometti Arm with Balloon Body. IEEE Robot. Autom. Lett. 2017, 2, 951–957. [Google Scholar] [CrossRef]
- Choi, Y.W.; Kang, D.; Pikhitsa, P.V.; Lee, T.; Kim, S.M.; Lee, G.; Tahk, D.; Choi, M. Ultra-sensitive Pressure sensor based on guided straight mechanical cracks. Sci. Rep. 2017, 7, 1–8. [Google Scholar] [CrossRef]
- Kang, D.; Pikhitsa, P.V.; Choi, Y.W.; Lee, C.; Shin, S.S.; Piao, L.; Park, B.; Suh, K.Y.; Kim, T., II; Choi, M. Ultrasensitive mechanical crack-based sensor inspired by the spider sensory system. Nature 2014, 516, 222–226. [Google Scholar] [CrossRef]
- Lee, E.; Kim, T.; Suh, H.; Kim, M.; Pikhitsa, P.V.; Han, S.; Koh, J.S.; Kang, D. Effect of metal thickness on the sensitivity of crack-based sensors. Sensors 2018, 18, 2872. [Google Scholar] [CrossRef] [Green Version]
- Kim, T.; Lee, T.; Lee, G.; Choi, Y.W.; Kim, S.M.; Kang, D.; Choi, M. Polyimide encapsulation of spider-inspired crack-based sensors for durability improvement. Appl. Sci. 2018, 8, 367. [Google Scholar] [CrossRef] [Green Version]



Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, D.; Han, S.; Kim, T.; Kim, C.; Lee, D.; Kang, D.; Koh, J.-S. Design of a Sensitive Balloon Sensor for Safe Human–Robot Interaction. Sensors 2021, 21, 2163. https://doi.org/10.3390/s21062163
Kim D, Han S, Kim T, Kim C, Lee D, Kang D, Koh J-S. Design of a Sensitive Balloon Sensor for Safe Human–Robot Interaction. Sensors. 2021; 21(6):2163. https://doi.org/10.3390/s21062163
Chicago/Turabian StyleKim, Dongjin, Seungyong Han, Taewi Kim, Changhwan Kim, Doohoe Lee, Daeshik Kang, and Je-Sung Koh. 2021. "Design of a Sensitive Balloon Sensor for Safe Human–Robot Interaction" Sensors 21, no. 6: 2163. https://doi.org/10.3390/s21062163