
Development of Nationwide Road Quality Map: Remote Sensing Meets Field Sensing



Abstract
:1. Introduction
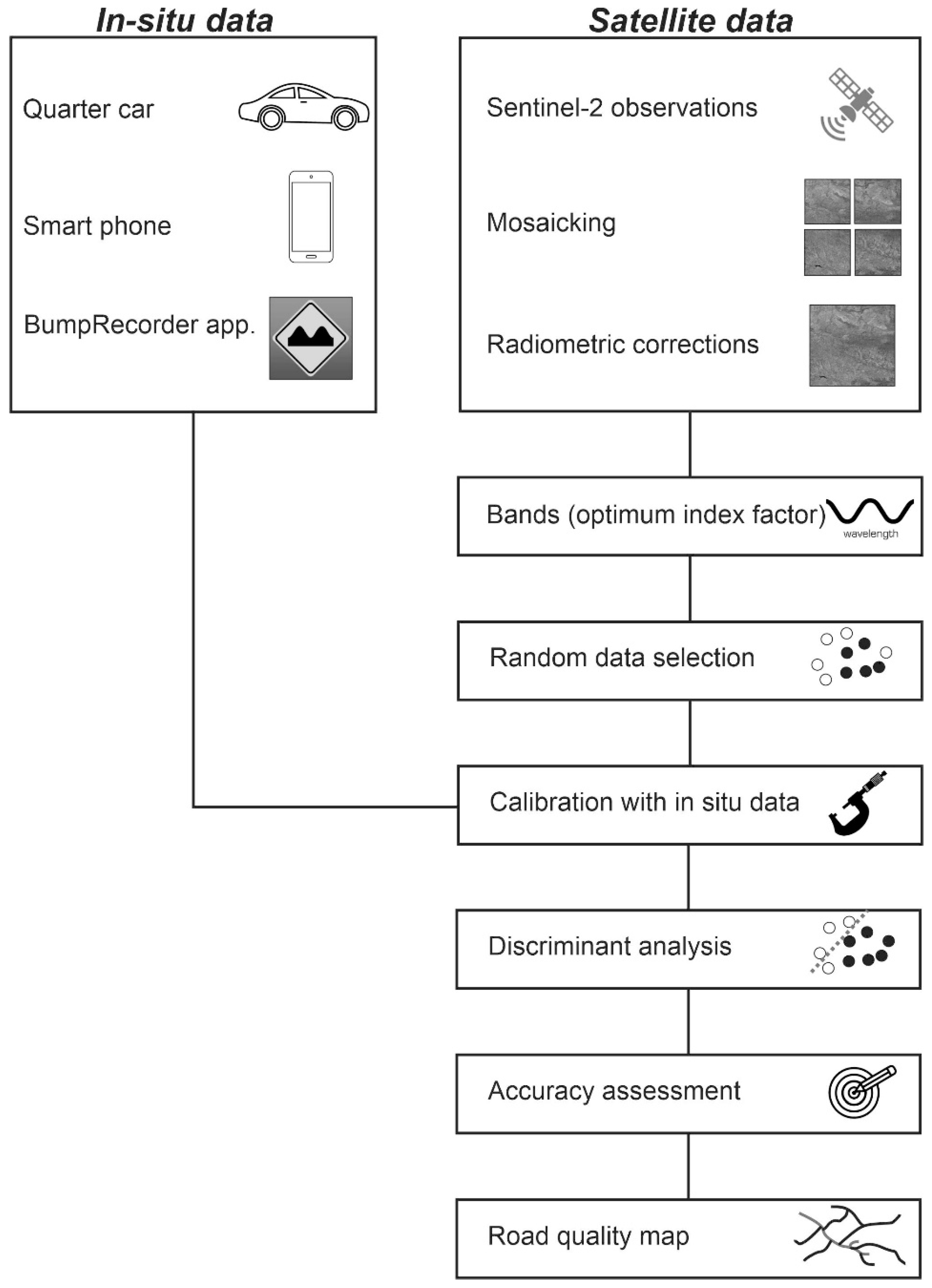
2. Data and Methodology
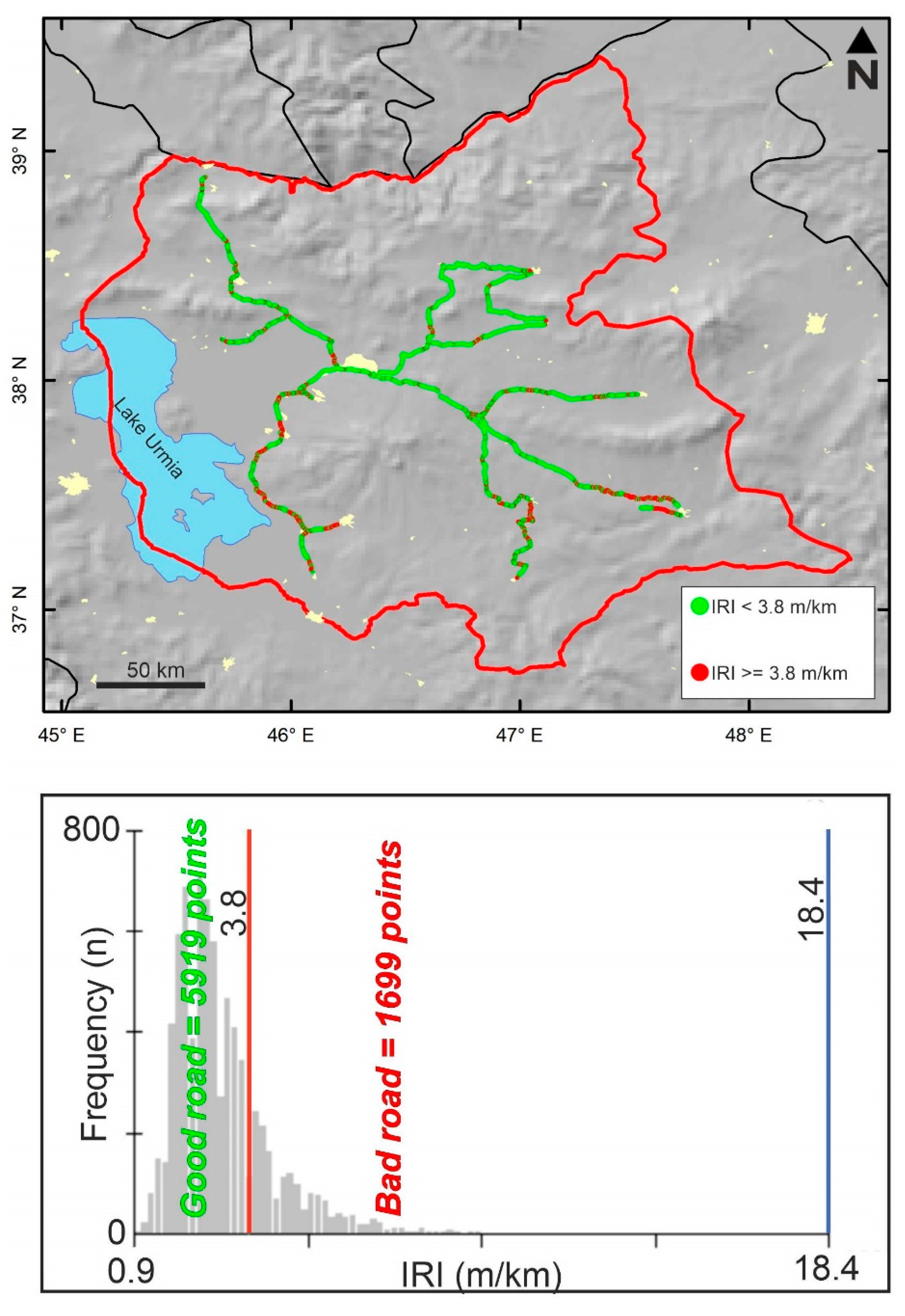
2.1. In Situ Measurements
2.2. Remote Sensing Data
2.3. Framework
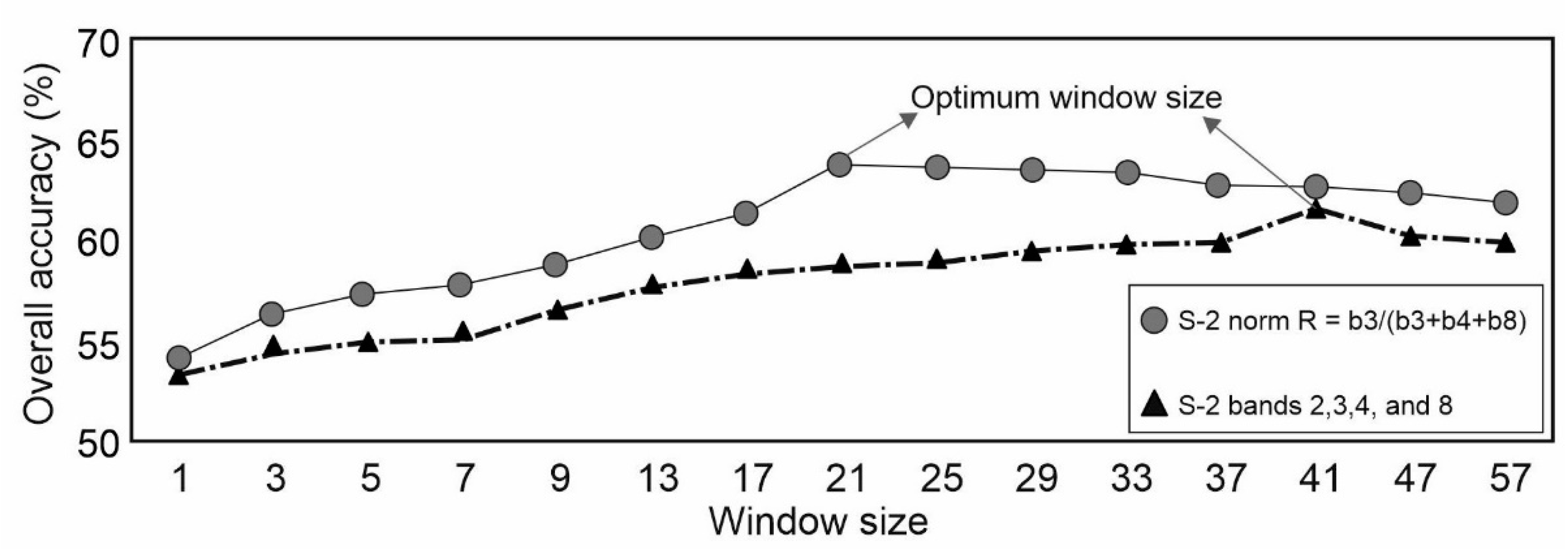
2.3.1. Optimum Index Factor
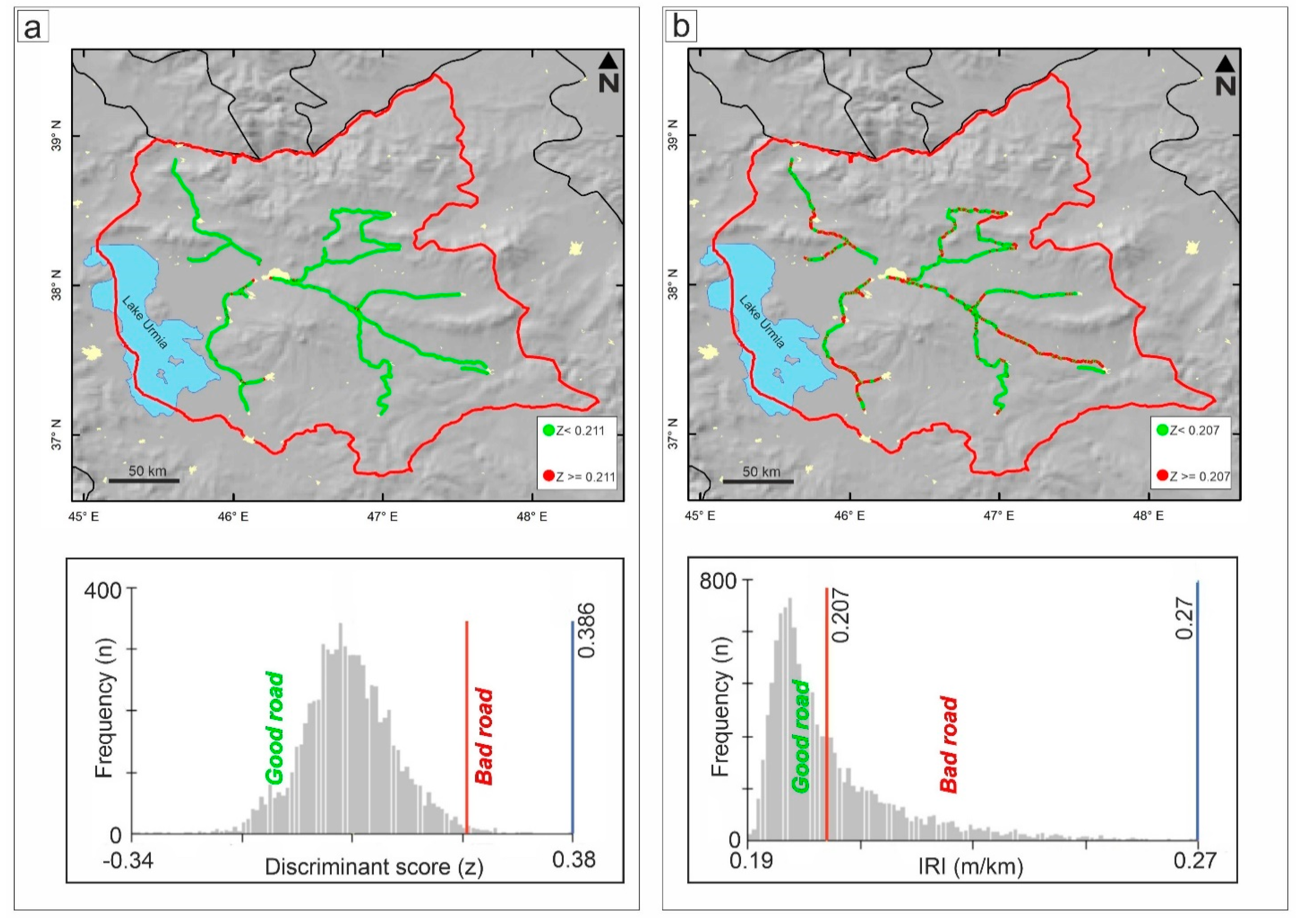
2.3.2. Discriminant Analysis
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Burningham, S.; Stankevich, N. Why Road Maintenance Is Important and How to Get It Done; Transport Notes Series; No. TRN 4; License: CC BY 3.0 IGO; World Bank: Washington, DC, USA, 2005; Available online: https://openknowledge.worldbank.org/handle/10986/11779 (accessed on 20 October 2020).
- Hicks, R.; Mahoney, J. Collection and use of pavement condition data. NCHRP Synth. 1981, 76, 1–25. [Google Scholar]
- Meyer, F.J.; Ajadi, O.A.; Hoppe, E.J. Studying the Applicability of X-Band SAR Data to the Network-Scale Mapping of Pavement Roughness on US Roads. Remote Sens. 2020, 12, 1507. [Google Scholar] [CrossRef]
- Karimzadeh, S.; Matsuoka, M. Remote Sensing X-Band SAR Data for Land Subsidence and Pavement Monitoring. Sensors 2020, 20, 4751. [Google Scholar] [CrossRef] [PubMed]
- Sayers, M.W. On the Calculation of International Roughness Index from Longitudinal Road Profile; Transportation Research Board: Washington, DC, USA, 1995; pp. 1–12. [Google Scholar]
- Karimzadeh, S.; Matsuoka, M. A Weighted Overlay Method for Liquefaction-Related Urban Damage Detection: A Case Study of the 6 September 2018 Hokkaido Eastern Iburi Earthquake, Japan. Geosciences 2018, 8, 487. [Google Scholar] [CrossRef] [Green Version]
- Karimzadeh, S.; Matsuoka, M. Ground Displacement in East Azerbaijan Province, Iran, Revealed by L-band and C-band InSAR Analyses. Sensors 2020, 20, 6913. [Google Scholar] [CrossRef]
- Milillo, P.; Bürgmann, R.; Lundgren, P.; Salzer, J.; Perissin, D.; Fielding, E.; Biondi, F.; Milillo, G. Space geodetic monitoring of engineered structures: The ongoing destabilization of the Mosul dam, Iraq. Sci. Rep. 2016, 6, 37408. [Google Scholar] [CrossRef] [Green Version]
- Karimzadeh, S.; Matsuoka, M.; Ogushi, F. Spatiotemporal deformation patterns of the Lake Urmia Causeway as characterized by multisensor InSAR analysis. Sci. Rep. 2018, 8, 5357. [Google Scholar] [CrossRef] [Green Version]
- Schnebele, E.; Tanyu, B.F.; Cervone, G.; Waters, N. Review of remote sensing methodologies for pavement management and assessment. Eur. Transp. Res. Rev. 2015, 7, 7. [Google Scholar] [CrossRef] [Green Version]
- Emery, W.; Singh, M.C. Large-Area Road-Surface Quality and Land-Cover Classification Using Very-High Spatial Resolution Aerial and Satellite Data; RITARS-12-H-CUB; U.S. Department of Transportation: San Francisco, CA, USA, 2013. [Google Scholar]
- Emery, W.; Yerasi, A.; Longbotham, N.; Pacifici, F. Assessing paved road surface condition with high resolution satellite imagery. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Quebec, QC, Canada, 13–18 July 2014; pp. 1–4. [Google Scholar]
- Suanpaga, W.; Yoshikazu, K. Riding quality model for asphalt pavement monitoring using phase array type L-band synthetic aperture radar (PALSAR). Remote Sens. 2010, 2, 2531–2546. [Google Scholar] [CrossRef] [Green Version]
- Mohammadi, A.; Karimzadeh, S.; Valizadeh Kamran, K.; Matsuoka, M. Extraction of Land Information, Future Landscape Changes and Seismic Hazard Assessment: A Case Study of Tabriz, Iran. Sensors 2020, 20, 7010. [Google Scholar] [CrossRef]
- Nhu, V.-H.; Mohammadi, A.; Shahabi, H.; Ahmad, B.B.; Al-Ansari, N.; Shirzadi, A.; Geertsema, M.; Kress, V.R.; Karimzadeh, S.; Valizadeh Kamran, K.; et al. Landslide Detection and Susceptibility Modeling on Cameron Highlands (Malaysia): A Comparison between Random Forest, Logistic Regression and Logistic Model Tree Algorithms. Forests 2020, 11, 830. [Google Scholar] [CrossRef]
- Yagi, K. Type Roughness Measurement and Cracking Detection Method by Using Smartphone. In Proceedings of the World Conference on Pavement and Asset Management, Milan, Italy, 12–16 June 2017. [Google Scholar]
- Sayers, M.; Gillespie, T.D. The Ann Arbor Road Profilometer Meeting; U.S. Department of Transportation: Washington, DC, USA, 1986; p. 226. [Google Scholar]
- Liu, J.; Qin, Q.; Li, J.; Li, Y. Rural Road Extraction from High-Resolution Remote Sensing Images Based on Geometric Feature Inference. ISPRS Int. J. Geo-Inf. 2017, 6, 314. [Google Scholar] [CrossRef] [Green Version]
- Alshaikhli, T.; Liu, W.; Maruyama, Y. Automated Method of Road Extraction from Aerial Images Using a Deep Convolutional Neural Network. Appl. Sci. 2019, 9, 4825. [Google Scholar] [CrossRef] [Green Version]
- Mattyus, G.; Wang, S.; Fidler, S.; Urtasun, R. Enhancing Road Maps by Parsing Aerial Images Around the World. In Proceedings of the 2015 IEEE International Conference on Computer Vision (ICCV), Santiago, Chile, 7–13 December 2015; IEEE Computer Society: Columbia, DC, USA, 2015; pp. 1689–1697. [Google Scholar]
- Luque, B.; Morros, J.R.; Ruiz-Hidalgo, J. Spatio-temporal Road Detection from Aerial Imagery using CNNs. In Proceedings of the 12th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications, Port, Portugal, 27 February–1 March 2017; SCITEPRESS—Science and Technology Publications: Porto, Portugal, 2017; pp. 493–500. [Google Scholar]
- Cira, C.-I.; Alcarria, R.; Manso-Callejo, M.-Á.; Serradilla, F. A Deep Learning-Based Solution for Large-Scale Extraction of the Secondary Road Network from High-Resolution Aerial Orthoimagery. Appl. Sci. 2020, 10, 7272. [Google Scholar] [CrossRef]
- Kienast-Brown, L.; Boettinger, J.L. Applying the Optimum Index Factor to Multiple Data Types in Soil Survey. In Digital Soil Mapping; Springer: Dordrecht, The Netherlands, 2010; pp. 385–398. [Google Scholar]
- Chavez, P.S.; Berlin, G.L.; Sowers, B. Statistical method for selecting Landsat MSS ratios. J. Appl. Photogr. Eng. 1982, 8, 23–30. [Google Scholar]
- Chavez, P.S.; Guptill, S.C.; Bowell, J.A. Image processing techniques for thematic mapper data. Proc. ASPRS-ACSM Tech. Pap. 1984, 2, 728–742. [Google Scholar]
- Karimzadeh, S.; Mastuoka, M. Building Damage Assessment Using Multisensor Dual-Polarized Synthetic Aperture Radar Data for the 2016 M 6.2 Amatrice Earthquake, Italy. Remote Sens. 2017, 9, 330. [Google Scholar] [CrossRef] [Green Version]
- Matsuoka, M.; Nojima, N. Building Damage Estimation by Integration of Seismic Intensity Information and Satellite L-band SAR Imagery. Remote Sens. 2010, 9, 2111–2126. [Google Scholar] [CrossRef] [Green Version]
- Huang, H.; Li, Z.; Pan, Y. Multi-Feature Manifold Discriminant Analysis for Hyperspectral Image Classification. Remote Sens. 2019, 11, 651. [Google Scholar] [CrossRef] [Green Version]
- Karimzadeh, S.; Matsuoka, M.; Kuang, J.; Ge, L. Spatial Prediction of Aftershocks Triggered by a Major Earthquake: A Binary Machine Learning Perspective. ISPRS Int. J. Geo-Inf. 2019, 8, 462. [Google Scholar] [CrossRef] [Green Version]
- Arai, K. Bi-Directional Reflectance Distribution Function: BRDF Effect on Un-mixing, Category Decomposition of the Mixed Pixel (MIXEL) of Remote Sensing Satellite Imagery Data. Int. J. Adv. Res. Artif. Intell. (IJARAI) 2013, 2, 19–23. [Google Scholar] [CrossRef] [Green Version]
- Arai, K. Inversion techniques for proportion estimation of mixels in high resolution satellite image analysis. Adv. Space Res. 1994, 14, 177–186. [Google Scholar] [CrossRef]
- Sun, L. Simulation of pavement roughness and IRI based on power spectral density. Math. Comput. Simul. 2003, 61, 77–88. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
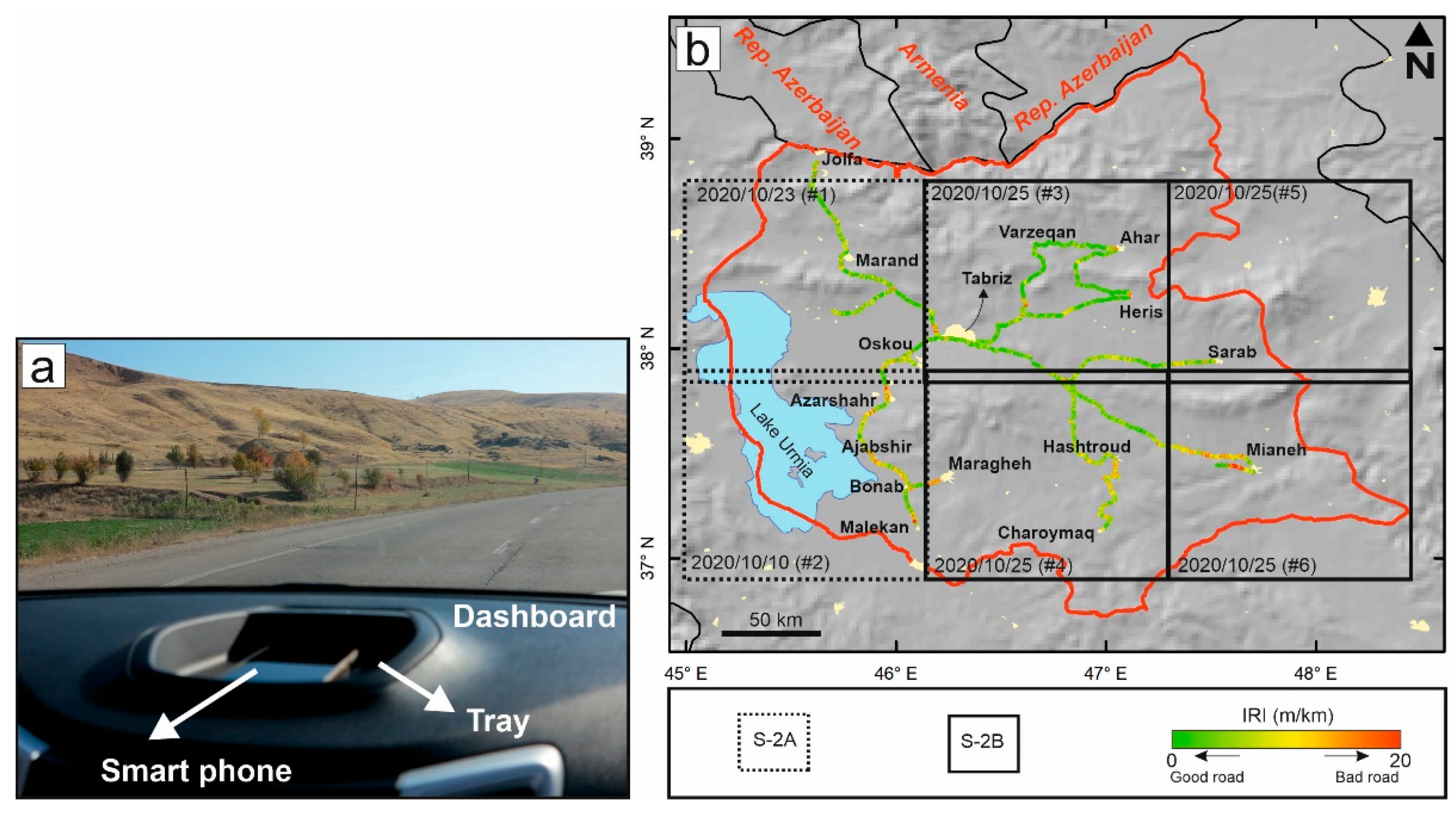
| ID (#) | Sensor | Product Type | Date (yyyy/mm/dd) | Area (km2) |
|---|---|---|---|---|
| 1 | Sentinel-2A | MSI2A | 2020/10/10 | 10,000 |
| 2 | Sentinel-2A | MSI2A | 2020/10/23 | 10,000 |
| 3 | Sentinel-2B | MSI2A | 2020/10/25 | 10,000 |
| 4 | Sentinel-2B | MSI2A | 2020/10/25 | 10,000 |
| 5 | Sentinel-2B | MSI2A | 2020/10/25 | 10,000 |
| 6 | Sentinel-2B | MSI2A | 2020/10/25 | 10,000 |
| OIF (41 × 41) | Norm R (21 × 21) | ||
|---|---|---|---|
| Number of points | 7313 | Number of points | 7313 |
| R-squared | 0.026 | R-squared | 0.0007 |
| Multiple R | 0.163 | Multiple R | 0.0275 |
| Standard error | 0.4 | Standard error | 0.405 |
| (intercept) | 0.317 | (intercept) | 0.342 |
| 0.00138 | −0.425 | ||
| −0.00149 | - | ||
| 0.0002 | - | ||
| 0.000087 | - | ||
| Cutoff score | 0.211 | Cutoff score | 0.207 |
| Sentinel-2 Classification (OIF) | Sentinel-2 Classification (Norm R) | ||
|---|---|---|---|
| 7162 | 4641 | ||
| 151 | 2672 | ||
| Misclassified roads | 2852 | Misclassified roads | 2560 |
| Total correct roads | 4461 | Total correct roads | 4753 |
| Total accuracy | 61% | Total accuracy | 65% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Karimzadeh, S.; Matsuoka, M. Development of Nationwide Road Quality Map: Remote Sensing Meets Field Sensing. Sensors 2021, 21, 2251. https://doi.org/10.3390/s21062251
Karimzadeh S, Matsuoka M. Development of Nationwide Road Quality Map: Remote Sensing Meets Field Sensing. Sensors. 2021; 21(6):2251. https://doi.org/10.3390/s21062251
Chicago/Turabian StyleKarimzadeh, Sadra, and Masashi Matsuoka. 2021. "Development of Nationwide Road Quality Map: Remote Sensing Meets Field Sensing" Sensors 21, no. 6: 2251. https://doi.org/10.3390/s21062251
APA StyleKarimzadeh, S., & Matsuoka, M. (2021). Development of Nationwide Road Quality Map: Remote Sensing Meets Field Sensing. Sensors, 21(6), 2251. https://doi.org/10.3390/s21062251