
Development of a Non-Linear Bi-Directional Vortex-Induced Piezoelectric Energy Harvester with Magnetic Interaction


Abstract
:1. Introduction
2. Design and Modeling
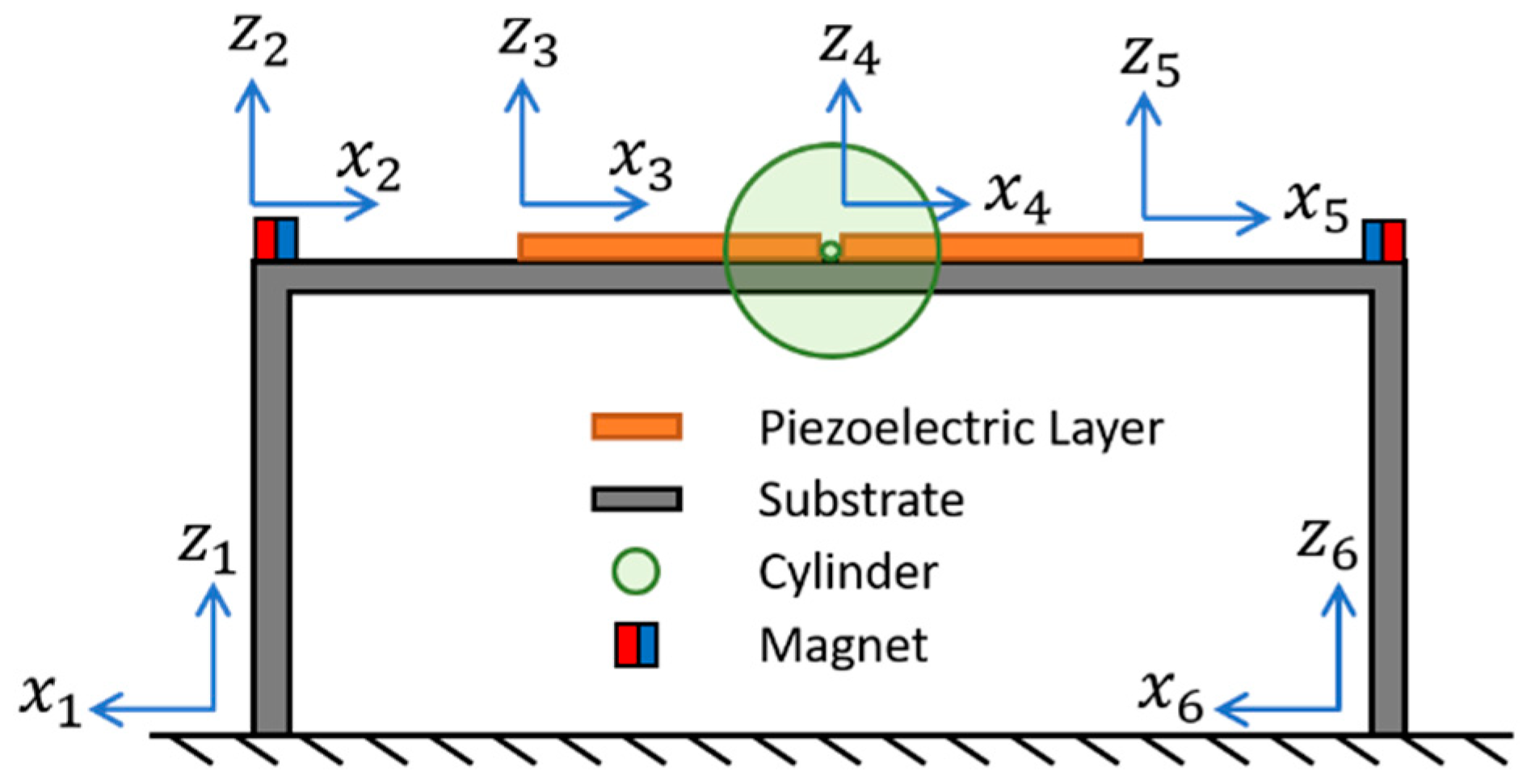
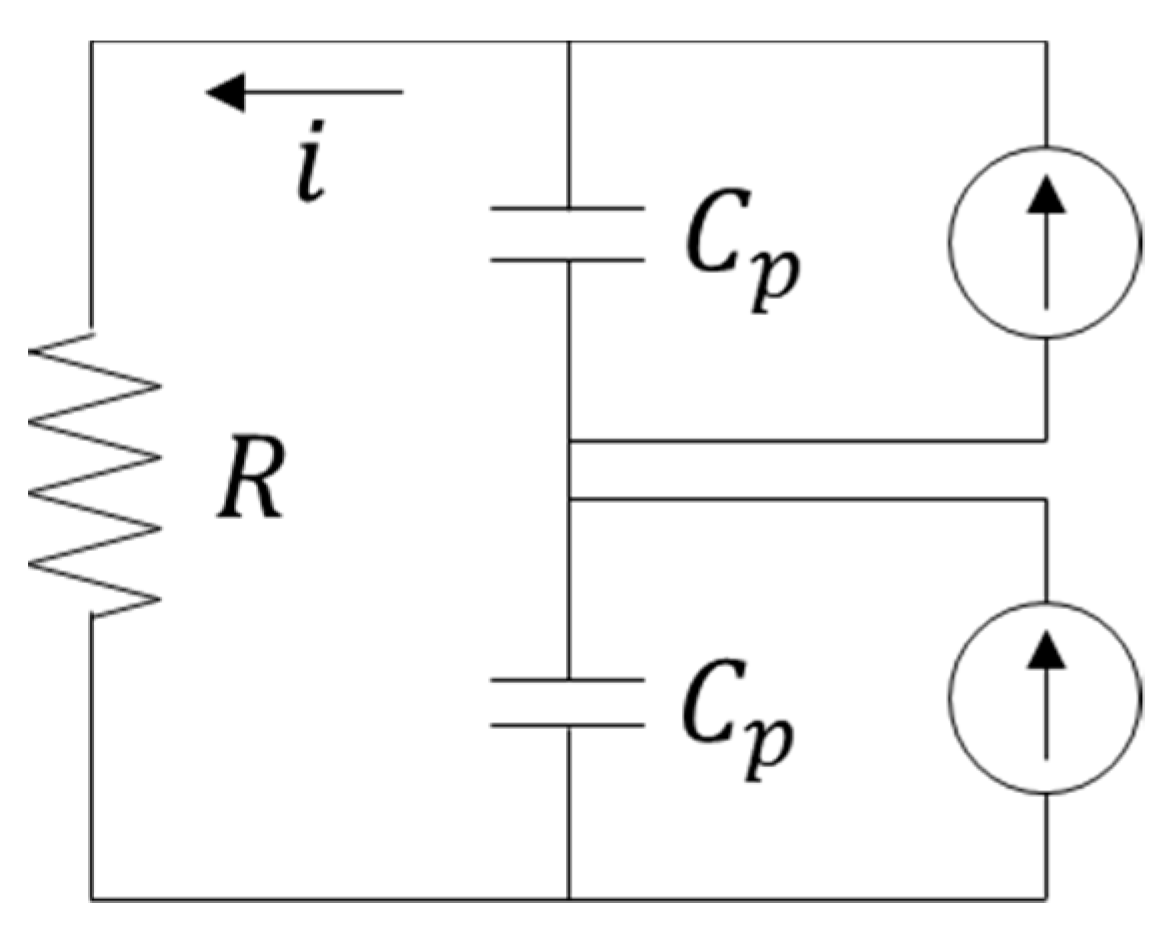
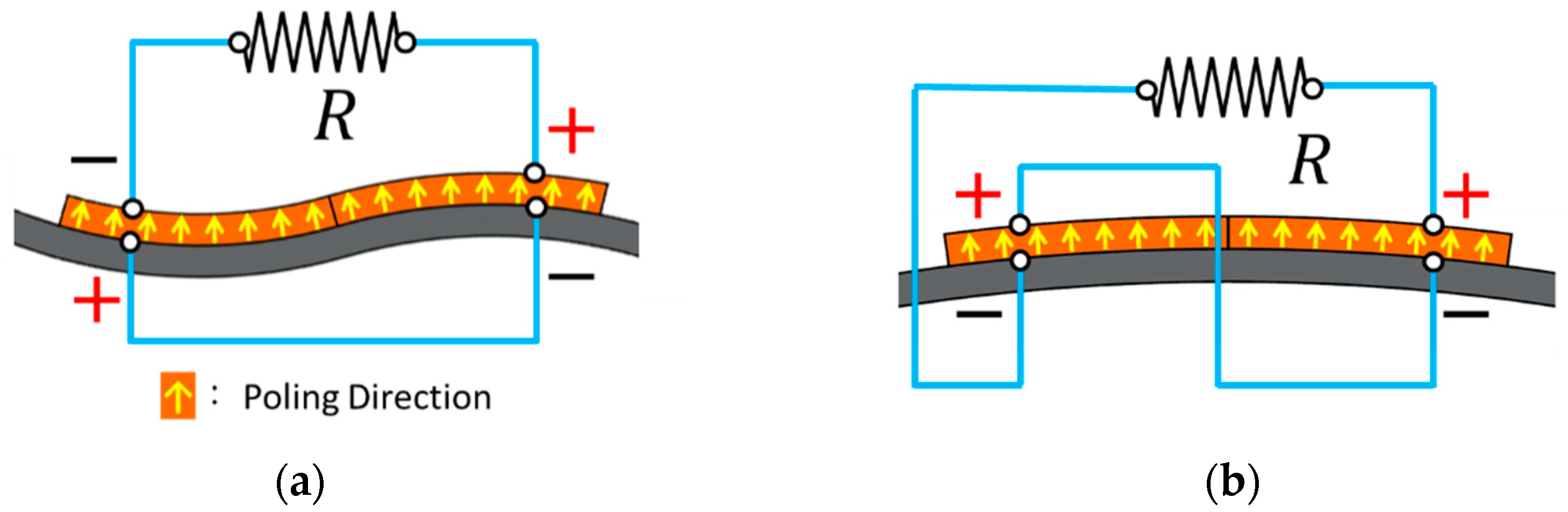
2.1. Modeling of the Proposed Piezoelectric Energy Harvester (PEH)
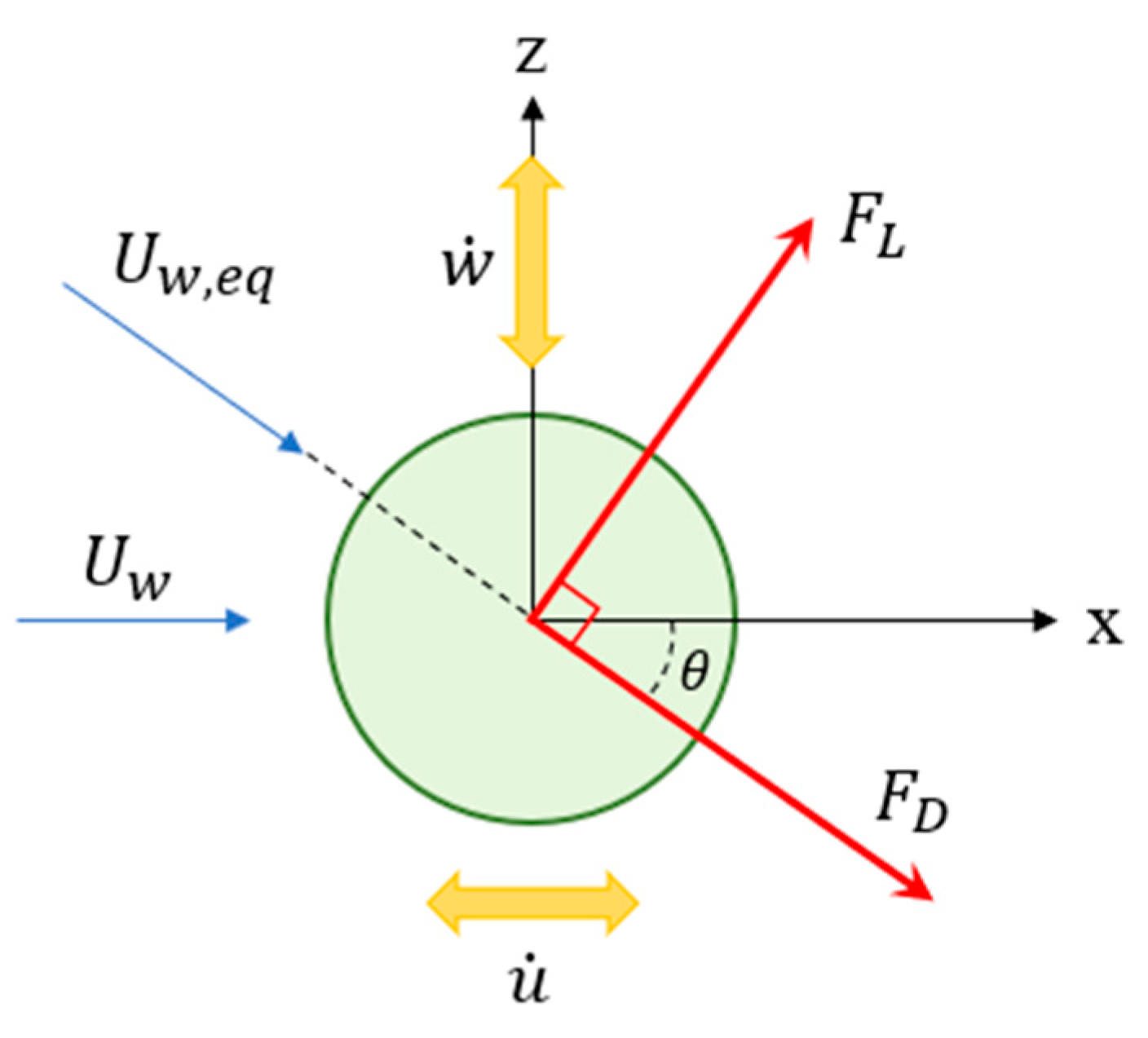
2.2. Vortex-Induced Vibrations
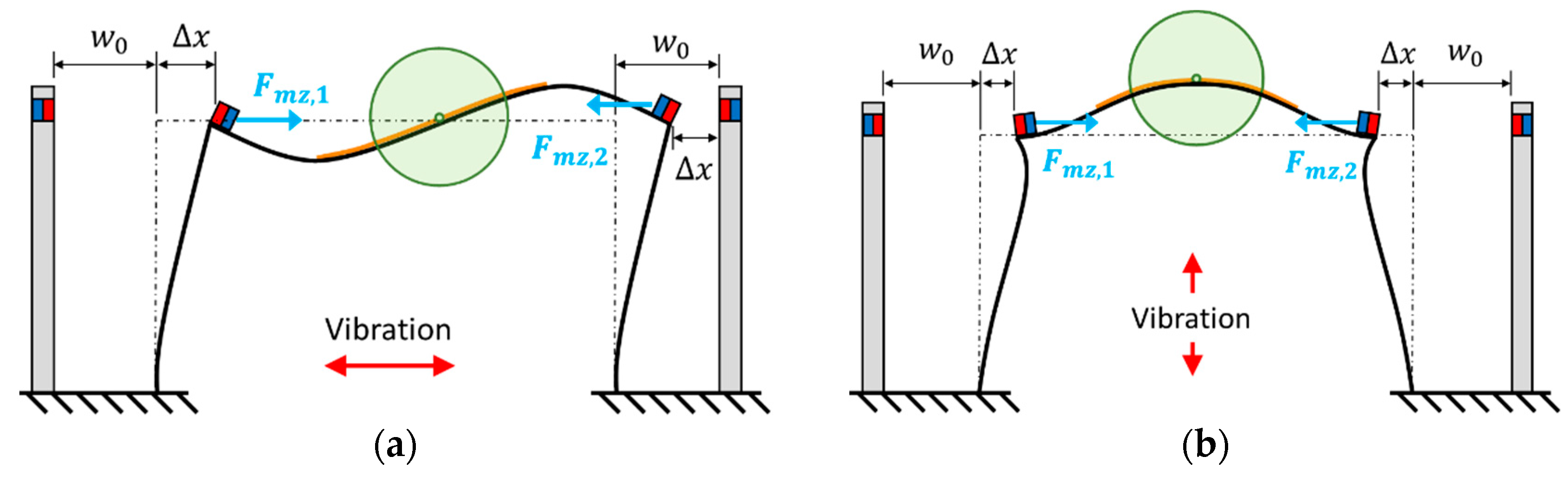
2.3. Magnetic Force
2.4. Model of the Proposed Non-Linear Bi-Directional PEH
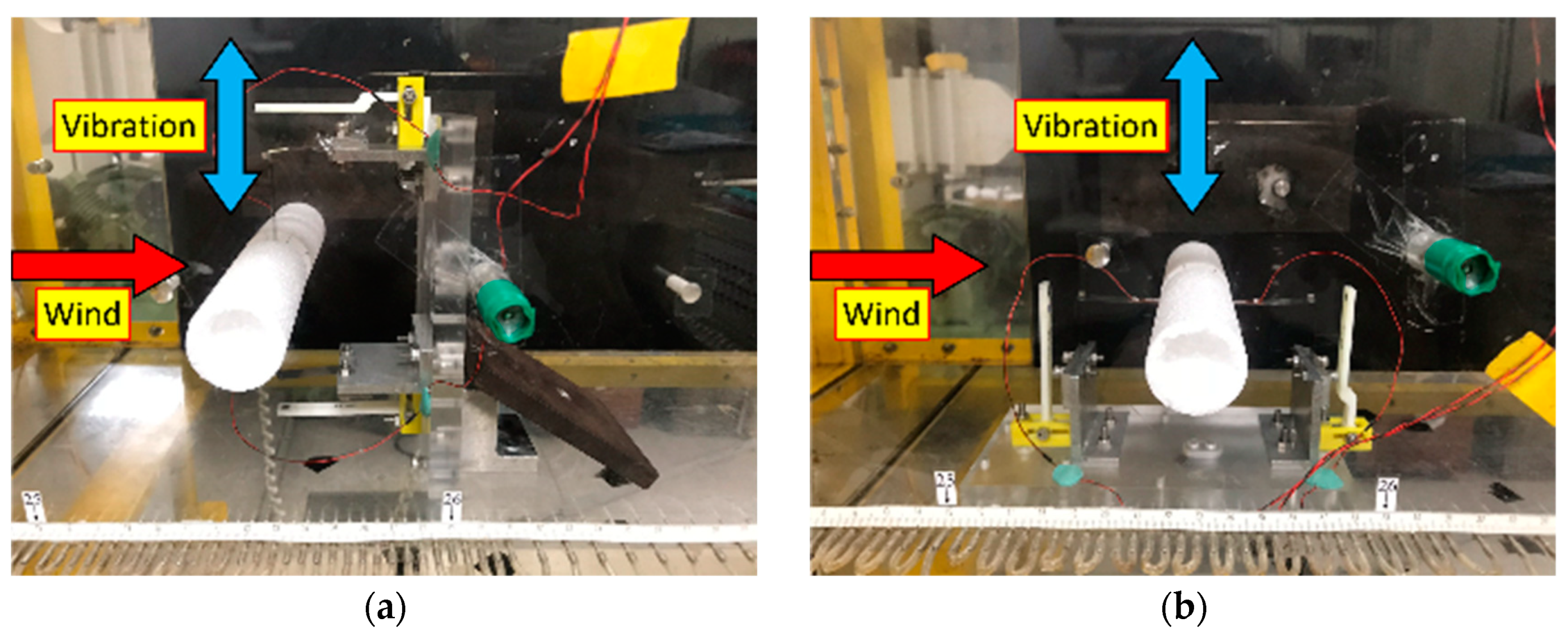
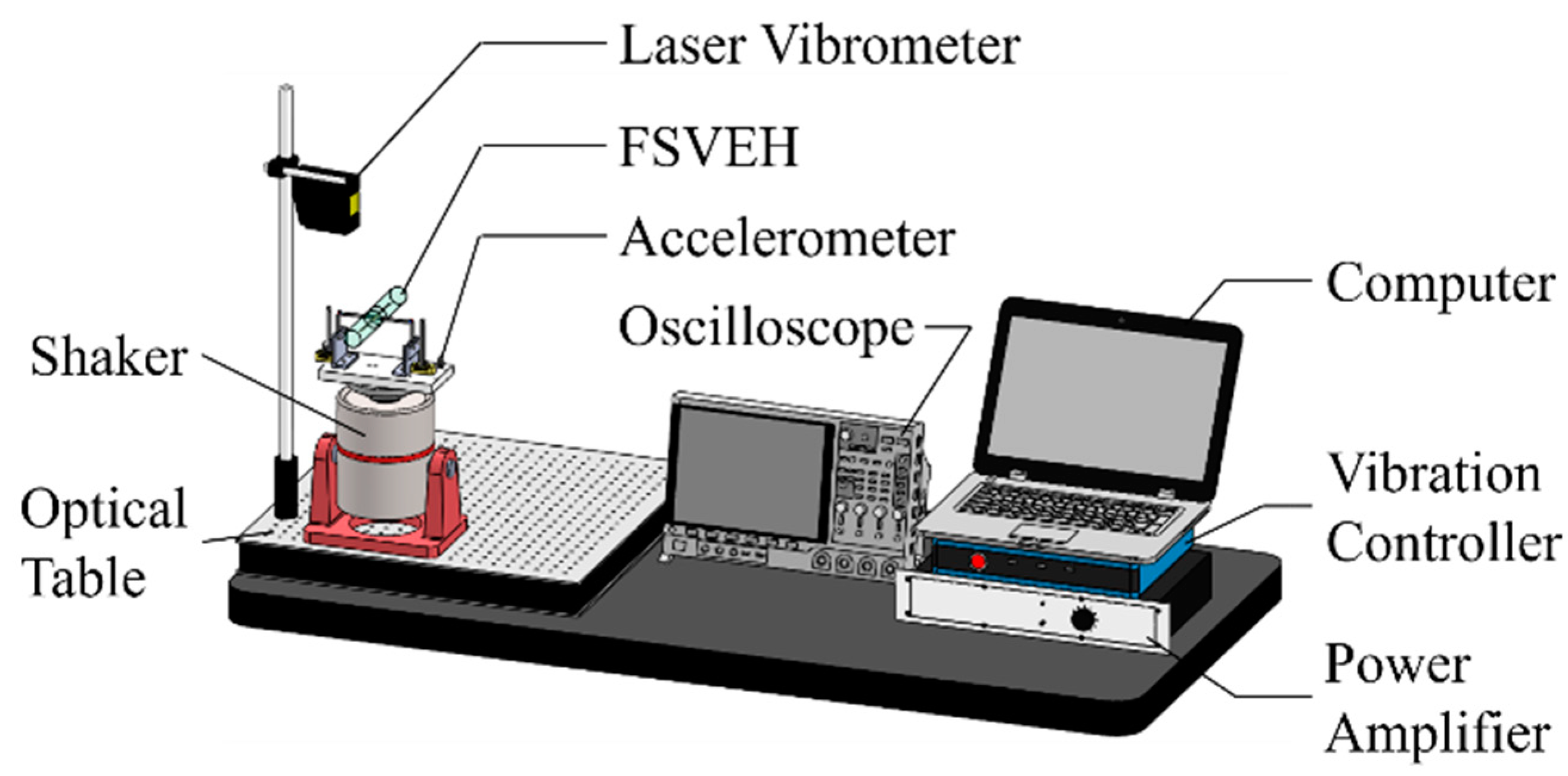
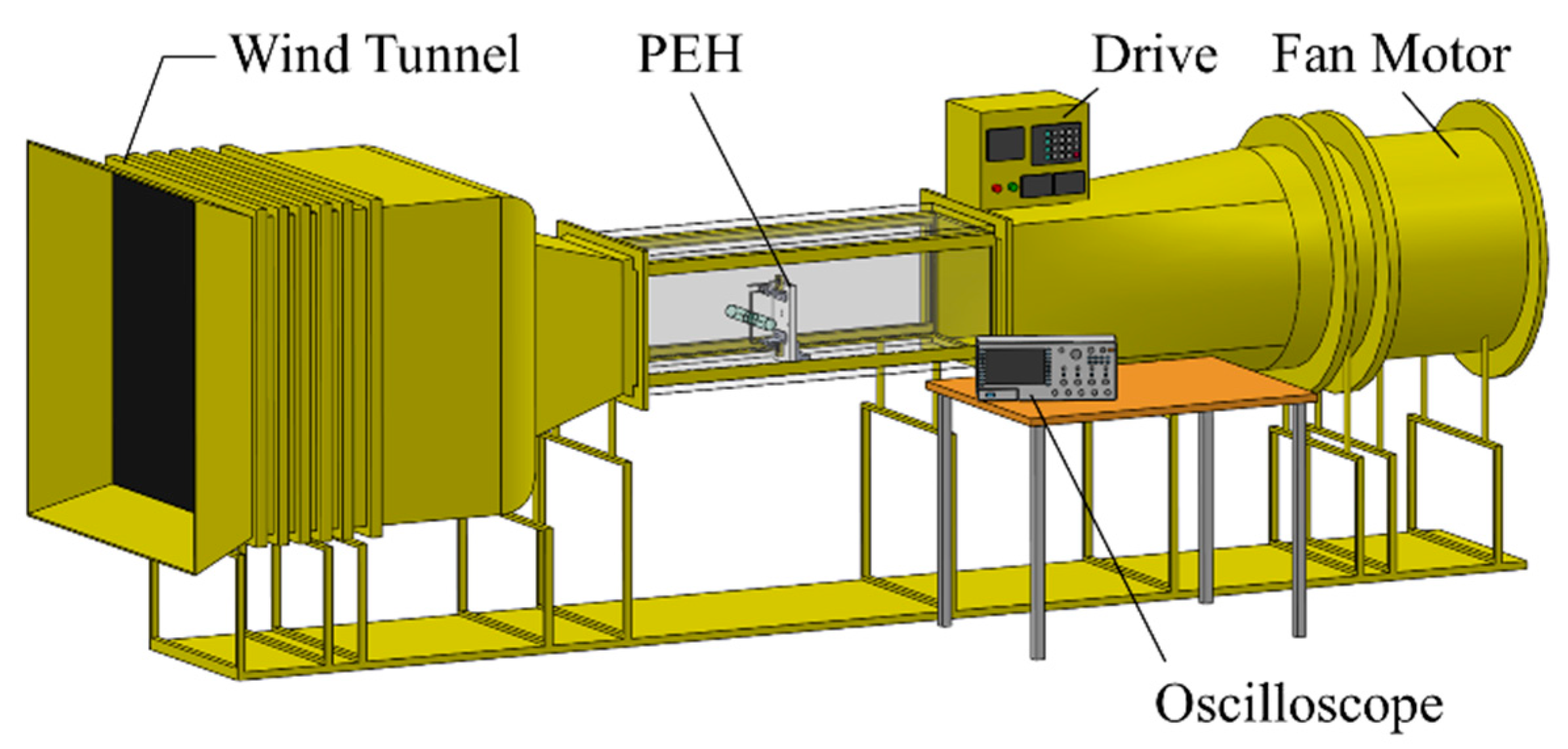
3. Experiment
4. Results
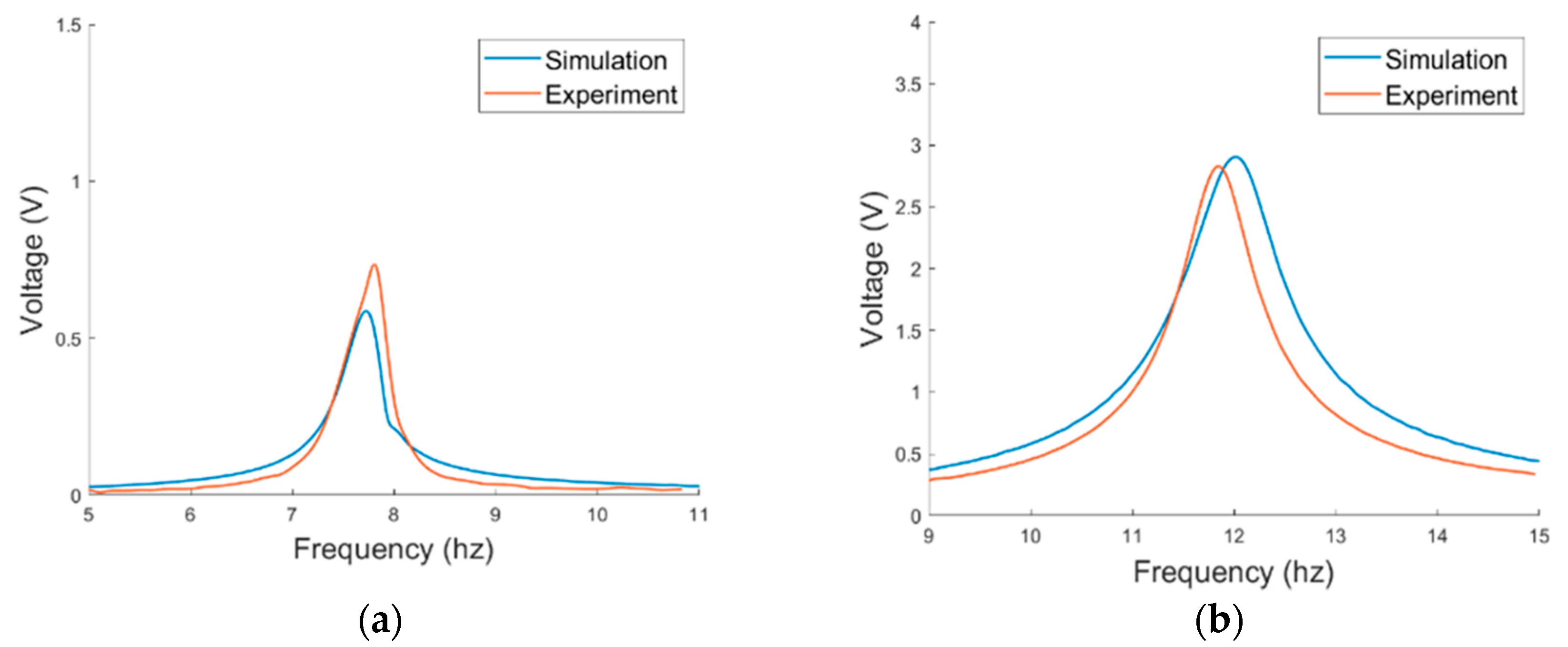
4.1. Proposed PEH under Base Excitation
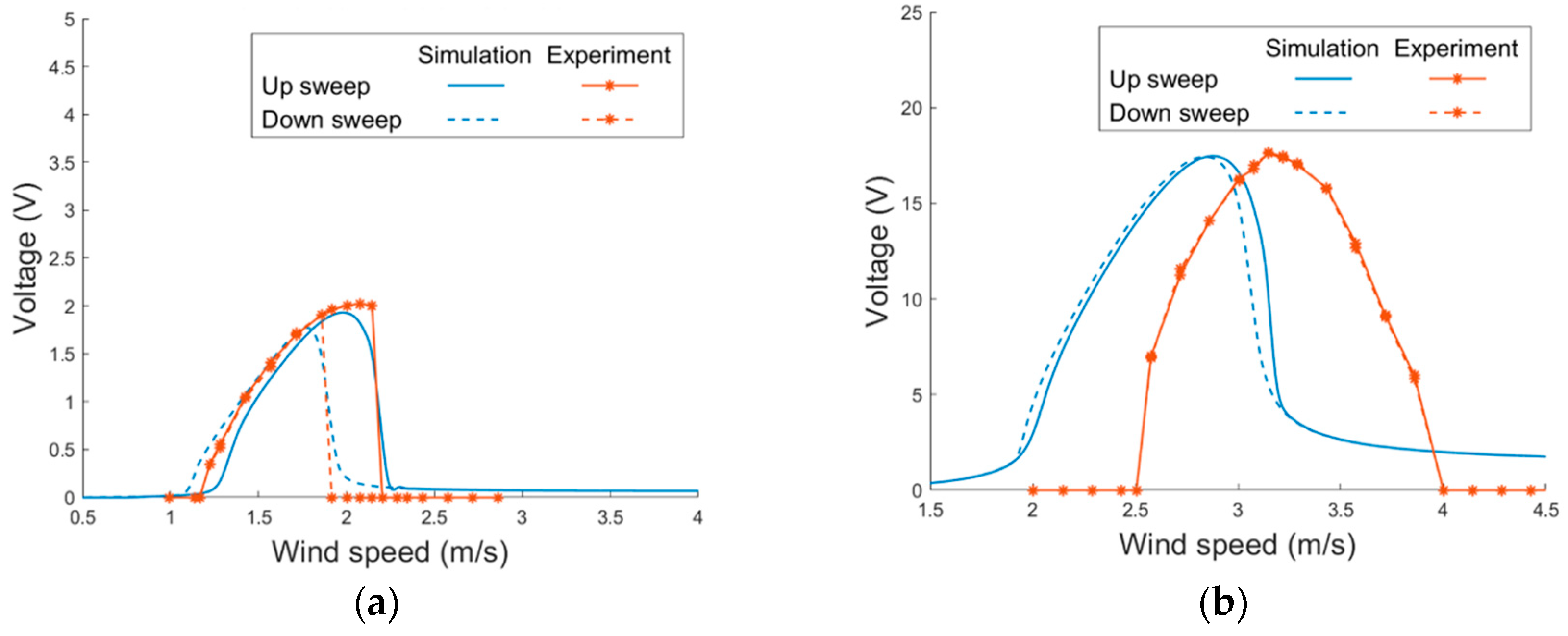
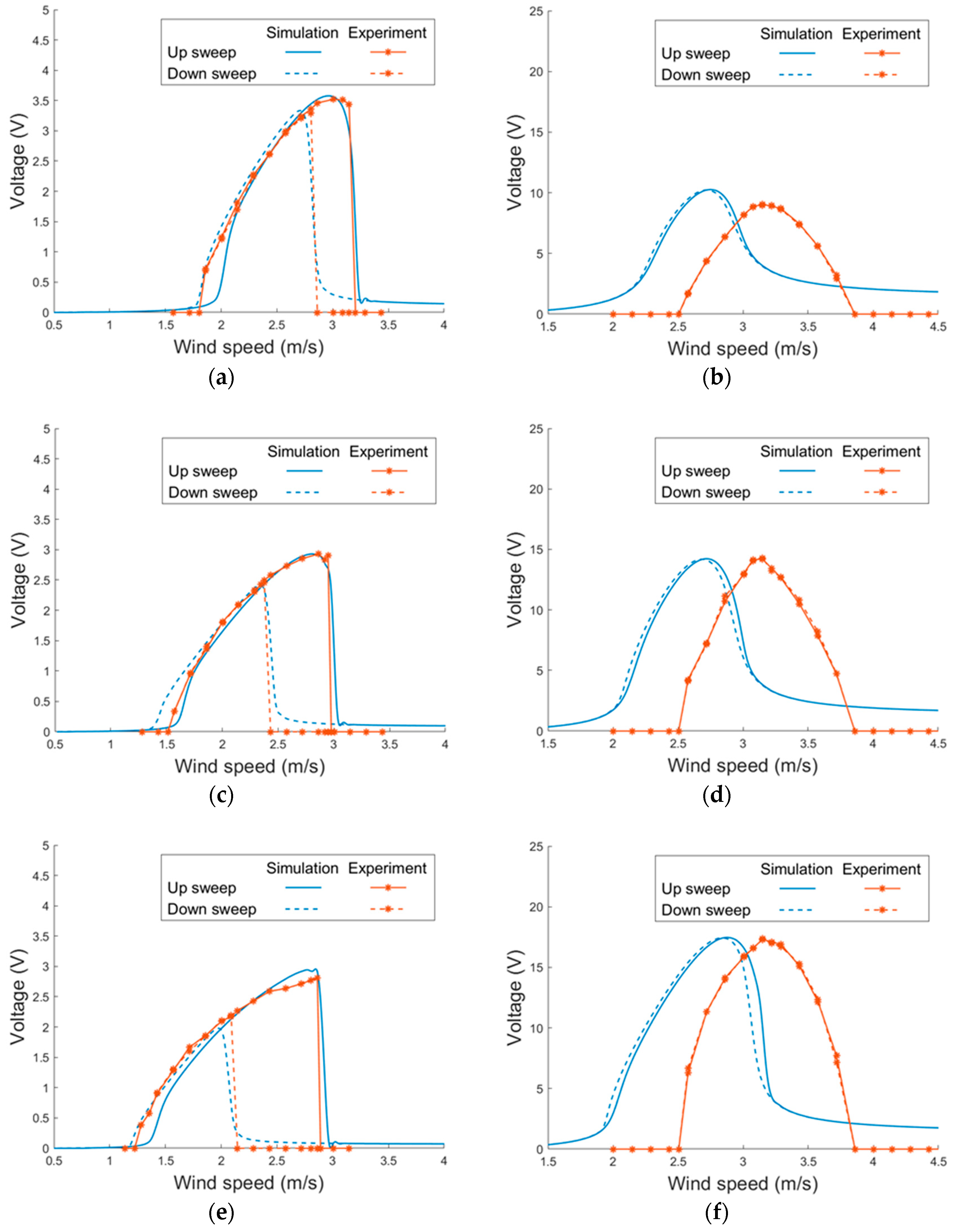
4.2. Proposed PEH under Vortex-Induced Vibrations
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Qi, S.; Shuttleworth, R.; Oyadiji, S.O.; Wright, J. Design of a multiresonant beam for broadband piezoelectric energy harvesting. Smart Mater. Struct. 2010, 19, 094009. [Google Scholar] [CrossRef]
- Erturk, A.; Renno, J.M.; Inman, D.J. Modeling of Piezoelectric Energy Harvesting from an L-shaped Beam-mass Structure with an Application to UAVs. J. Intell. Mater. Syst. Struct. 2008, 20, 529–544. [Google Scholar] [CrossRef]
- Liu, H.; Lee, C.; Kobayashi, T.; Tay, C.J.; Quan, C. Investigation of a MEMS piezoelectric energy harvester system with a frequency-widened-bandwidth mechanism introduced by mechanical stoppers. Smart Mater. Struct. 2012, 21, 035005. [Google Scholar] [CrossRef]
- Zhao, D.; Wang, X.; Cheng, Y.; Liu, S.; Wu, Y.; Chai, L.; Liu, Y.; Cheng, Q.; Xiaoman, W.; Yuan, C.; et al. Analysis of single-degree-of-freedom piezoelectric energy harvester with stopper by incremental harmonic balance method. Mater. Res. Express 2018, 5, 055502. [Google Scholar] [CrossRef]
- Stanton, S.C.; McGehee, C.C.; Mann, B.P. Nonlinear dynamics for broadband energy harvesting: Investigation of a bistable piezoelectric inertial generator. Phys. D Nonlinear Phenom. 2010, 239, 640–653. [Google Scholar] [CrossRef]
- Lan, C.; Qin, W. Enhancing ability of harvesting energy from random vibration by decreasing the potential barrier of bistable harvester. Mech. Syst. Signal Process. 2017, 85, 71–81. [Google Scholar] [CrossRef]
- Shih, H.-A.; Su, W.-J. Theoretical analysis and experimental study of a nonlinear U-shaped bi-directional piezoelectric energy harvester. Smart Mater. Struct. 2018, 28, 015017. [Google Scholar] [CrossRef]
- Yayla, S.; Ayça, S.; Oruç, M. A case study on piezoelectric energy harvesting with using vortex generator plate modeling for fluids. Renew. Energy 2020, 157, 1243–1253. [Google Scholar] [CrossRef]
- Jadidi, P.; Zeinoddini, M. Influence of hard marine fouling on energy harvesting from Vortex-Induced Vibrations of a single-cylinder. Renew. Energy 2020, 152, 516–528. [Google Scholar] [CrossRef]
- Gu, M.; Song, B.; Zhang, B.; Mao, Z.; Tian, W. The effects of submergence depth on Vortex-Induced Vibration (VIV) and energy harvesting of a circular cylinder. Renew. Energy 2020, 151, 931–945. [Google Scholar] [CrossRef]
- Sun, H.; Bernitsas, M.M.; Turkol, M. Adaptive harnessing damping in hydrokinetic energy conversion by two rough tandem-cylinders using flow-induced vibrations. Renew. Energy 2020, 149, 828–860. [Google Scholar] [CrossRef]
- Tan, T.; Hu, X.; Yan, Z.; Zhang, W. Enhanced low-velocity wind energy harvesting from transverse galloping with super capacitor. Energy 2019, 187, 115915. [Google Scholar] [CrossRef]
- Zhao, L.; Tang, L.; Yang, Y. Synchronized charge extraction in galloping piezoelectric energy harvesting. J. Intell. Mater. Syst. Struct. 2016, 27, 453–468. [Google Scholar] [CrossRef]
- Yang, K.; Wang, J.; Yurchenko, D. A double-beam piezo-magneto-elastic wind energy harvester for improving the galloping-based energy harvesting. Appl. Phys. Lett. 2019, 115, 193901. [Google Scholar] [CrossRef]
- Petrini, F.; Gkoumas, K. Piezoelectric energy harvesting from vortex shedding and galloping induced vibrations inside HVAC ducts. Energy Build. 2018, 158, 371–383. [Google Scholar] [CrossRef]
- Barrero-Gil, A.; Alonso, G.; Sanz-Andres, A. Energy harvesting from transverse galloping. J. Sound Vib. 2010, 329, 2873–2883. [Google Scholar] [CrossRef]
- Orrego, S.; Shoele, K.; Ruas, A.; Doran, K.; Caggiano, B.; Mittal, R.; Kang, S.H. Harvesting ambient wind energy with an inverted piezoelectric flag. Appl. Energy 2017, 194, 212–222. [Google Scholar] [CrossRef]
- Zhou, Z.; Qin, W.; Zhu, P.; Du, W.; Deng, W.; Pan, J. Scavenging wind energy by a dynamic-stable flutter energy harvester with rectangular wing. Appl. Phys. Lett. 2019, 114, 243902. [Google Scholar] [CrossRef]
- Li, K.; Yang, Z.; Gu, Y.; He, S.; Zhou, S. Nonlinear magnetic-coupled flutter-based aeroelastic energy harvester: Modeling, simulation and experimental verification. Smart Mater. Struct. 2018, 28, 015020. [Google Scholar] [CrossRef]
- Bryant, M.; Garcia, E. Modeling and Testing of a Novel Aeroelastic Flutter Energy Harvester. J. Vib. Acoust. 2011, 133, 011010. [Google Scholar] [CrossRef]
- Sun, W.; Guo, F.; Seok, J. Development of a novel vibro-wind galloping energy harvester with high power density incorporated with a nested bluff-body structure. Energy Convers. Manag. 2019, 197, 111880. [Google Scholar] [CrossRef]
- Demori, M.; Ferrari, M.; Bonzanini, A.; Poesio, P.; Ferrari, V. Autonomous Sensors Powered by Energy Harvesting from von Karman Vortices in Airflow. Sensors 2017, 17, 2100. [Google Scholar] [CrossRef] [PubMed]
- Alhadidi, A.H.; Daqaq, M.F. A broadband bi-stable flow energy harvester based on the wake-galloping phenomenon. Appl. Phys. Lett. 2016, 109, 033904. [Google Scholar] [CrossRef]
- Jung, H.-J.; Lee, S.-W. The experimental validation of a new energy harvesting system based on the wake galloping phenomenon. Smart Mater. Struct. 2011, 20, 055022. [Google Scholar] [CrossRef]
- Akaydin, H.D.; Elvin, N.; Andreopoulos, Y. The performance of a self-excited fluidic energy harvester. Smart Mater. Struct. 2012, 21. [Google Scholar] [CrossRef]
- Zhou, S.; Wang, J. Dual serial vortex-induced energy harvesting system for enhanced energy harvesting. AIP Adv. 2018, 8, 075221. [Google Scholar] [CrossRef]
- Zhang, L.; Abdelkefi, A.; Dai, H.; Naseer, R.; Wang, L. Design and experimental analysis of broadband energy harvesting from vortex-induced vibrations. J. Sound Vib. 2017, 408, 210–219. [Google Scholar] [CrossRef]
- Wang, J.; Hu, G.; Su, Z.; Li, G.; Zhao, W.; Tang, L.; Zhao, L. A cross-coupled dual-beam for multi-directional energy harvesting from vortex induced vibrations. Smart Mater. Struct. 2019, 28, 12LT02. [Google Scholar] [CrossRef]
- Su, W.-J.; Lin, W.-Y. Design and analysis of a vortex-induced bi-directional piezoelectric energy harvester. Int. J. Mech. Sci. 2020, 173, 105457. [Google Scholar] [CrossRef]
- Zanganeh, H.; Srinil, N. Three-dimensional VIV prediction model for a long flexible cylinder with axial dynamics and mean drag magnifications. J. Fluids Struct. 2016, 66, 127–146. [Google Scholar] [CrossRef]
- Blevins, R.D. Flow-Induced Vibration; Van Nostrand Reinhold Co.: New York, NY, USA, 1977. [Google Scholar]
- Furlani, E.P. Permanent Magnet and Electromechanical Devices: Materials, Analysis, and Applications; Academic Press: San Diego, CA, USA, 2001. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Symbol | Value |
|---|---|---|
| Length of the main beam | 130 mm | |
| Length of the side beam | 40 mm | |
| Length of the magnet on the PEH | Lmag,1 | 3 mm |
| Length of the magnet on the base | Lmag,2 | 4 mm |
| Length of the epoxy layer | Lex | 33.5 mm |
| Length of the macro fiber composite (MFC) patch | Lp | 33.5 mm |
| Length of the cylinder | Lc | 200 mm |
| Young’s modulus of the substrate | Ys | 178 GPa |
| Young’s modulus of the epoxy | Yex | 27 MPa |
| Young’s modulus of the MFC patch | Ye | 30.336 GPa |
| Thickness of the substrate | hs | 0.07 mm |
| Thickness of the epoxy layer | hex | 0.02 mm |
| Thickness of the MFC patch | hp | 0.3 mm |
| Width of the substrate | bs | 12.7 mm |
| Width of the epoxy layer | bex | 6.4 mm |
| Width of the MFC patch | bp | 6.4 mm |
| Density of the substrate | ρs | 7800 kg/m3 |
| Density of the epoxy | ρe | 1200 kg/m3 |
| Density of the MFC patch | ρp | 5440 kg/m3 |
| Weight of the magnet on the PEH | Mmag | 0.255 g |
| Magnetization | Br | 1.32 T |
| Relative permeability | μr | 1.2 |
| Permeability | μ0 | 4π × 10−7 N∙A−2 |
| Diameter of the cylinder | Dc | 40 mm |
| Weight of the cylinder | Mc | 2.7 g |
| Weight of the stick | Mstick | 0.3 g |
| Capacitance (MFC) | Cp | 21.2 nF |
| Piezoelectric constant (MFC) | d31 | −250 pm/V |
| Load resistance (base excitation) | R | 500 kΩ |
| Load resistance (VIVs) | R | 1 MΩ |
| Mode | Damping Ratio |
|---|---|
| horizontal | 0.0182 |
| vertical | 0.0326 |
| Mode | K | β |
|---|---|---|
| horizontal | 17.7 | 0.12 |
| vertical | 17 | 0.24 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Su, W.-J.; Wang, Z.-S. Development of a Non-Linear Bi-Directional Vortex-Induced Piezoelectric Energy Harvester with Magnetic Interaction. Sensors 2021, 21, 2299. https://doi.org/10.3390/s21072299
Su W-J, Wang Z-S. Development of a Non-Linear Bi-Directional Vortex-Induced Piezoelectric Energy Harvester with Magnetic Interaction. Sensors. 2021; 21(7):2299. https://doi.org/10.3390/s21072299
Chicago/Turabian StyleSu, Wei-Jiun, and Zong-Siang Wang. 2021. "Development of a Non-Linear Bi-Directional Vortex-Induced Piezoelectric Energy Harvester with Magnetic Interaction" Sensors 21, no. 7: 2299. https://doi.org/10.3390/s21072299