
Continuous Sign Language Recognition through a Context-Aware Generative Adversarial Network



Abstract
1. Introduction
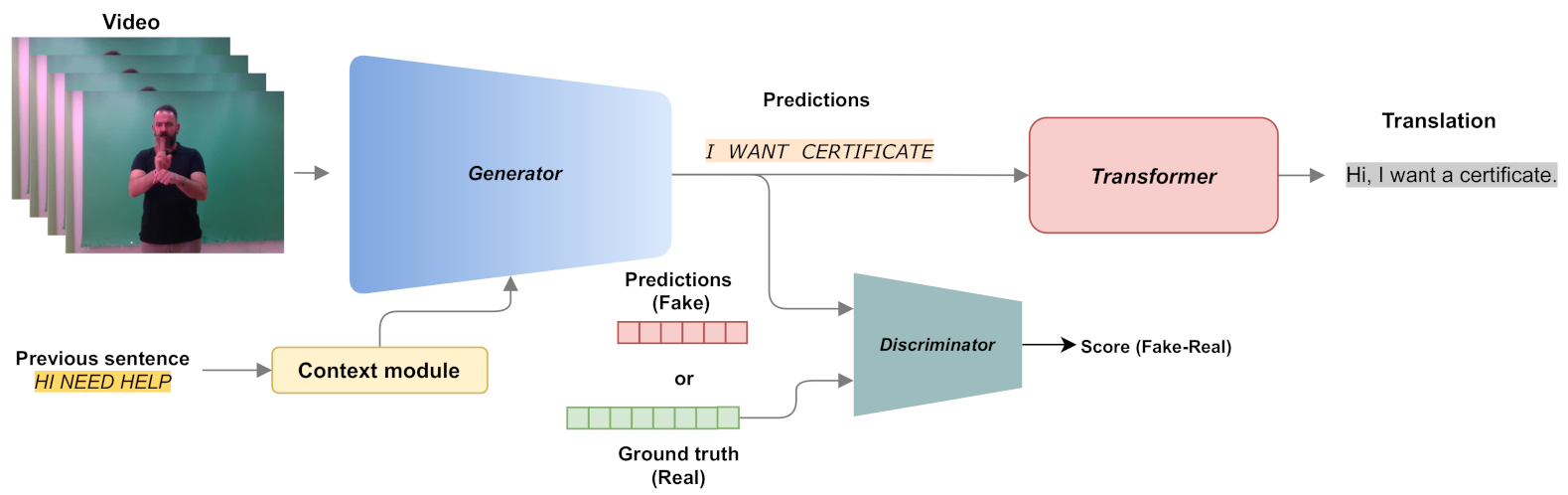
- A novel approach for continuous sign language recognition using a generative adversarial network architecture is introduced. The proposed network architecture comprises a generator, which aims to predict the corresponding glosses from a video sequence through a series of a CNN, Temporal Convolution Layers (TCLs), and BLSTM layers, as well as a discriminator, which consists of two branches, i.e., a sentence-level and a gloss-level branch, aiming to distinguish between the ground-truth glosses and the predictions of the generator.
- The importance of leveraging contextual information on sign language conversations is investigated in order to improve the overall CSLR performance. The proposed method uses information from the previous sentence of the dialogue in the form of hidden states to initialize the generator’s BLSTM network in the next sentence for both Deaf-to-Deaf and Deaf-to-hearing communication. Thereby, the previous context of the dialogue is taken into consideration in the next sentence for the recognition of more relative glosses with respect to the conversation topic. The experimental results presented in the paper demonstrate the improvement in sign language recognition accuracy when contextual information is considered.
- The proposed network design was benchmarked on three publicly available datasets and compared against several state-of-the-art CSLR methods to demonstrate its effectiveness. Additional experimental results with a transformer network show the great potential of the proposed method in sign language translation.
2. Related Work
3. Proposed Method
3.1. Generator
3.2. Discriminator
3.3. Context-Aware SLRGAN
3.3.1. Deaf-to-Hearing SLRGAN
3.3.2. Deaf-to-Deaf SLRGAN
3.4. Sign Language Translation
4. Training
4.1. Generator Loss
4.2. Discriminator Loss
5. Experimental Evaluation
5.1. Datasets and Evaluation Metrics
5.2. Implementation Details
5.3. Experimental Results
5.3.1. Ablation Study
5.3.2. Evaluation on the RWTH-Phoenix-Weather-2014 Dataset
5.3.3. Evaluation on the CSL Dataset
5.3.4. Evaluation on the GSL Dataset
5.3.5. Results on Sign Language Translation
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Bragg, D.; Koller, O.; Bellard, M.; Berke, L.; Boudreault, P.; Braffort, A.; Caselli, N.; Huenerfauth, M.; Kacorri, H.; Verhoef, T.; et al. Sign Language Recognition, Generation, and Translation: An Interdisciplinary Perspective. In Proceedings of the 21st International ACM SIGACCESS Conference on Computers and Accessibility, Pittsburgh, PA, USA, 28–30 October 2019; pp. 16–31. [Google Scholar]
- Stefanidis, K.; Konstantinidis, D.; Kalvourtzis, A.; Dimitropoulos, K.; Daras, P. 3D technologies and applications in sign language. Recent Adv. Imaging, Model. Reconstr. 2020, 50–78. [Google Scholar] [CrossRef]
- Konstantinidis, D.; Dimitropoulos, K.; Daras, P. Sign language recognition based on hand and body skeletal data. In Proceedings of the 2018-3DTV-Conference: The True Vision-Capture, Transmission and Display of 3D Video (3DTV-CON), Helsinki, Finland, 3–5 June 2018; pp. 1–4. [Google Scholar]
- Joze, H.R.V.; Koller, O. MS-ASL: A Large-Scale Data Set and Benchmark for Understanding American Sign Language. arXiv 2018, arXiv:1812.01053. [Google Scholar]
- Konstantinidis, D.; Dimitropoulos, K.; Daras, P. A deep learning approach for analyzing video and skeletal features in sign language recognition. In Proceedings of the 2018 IEEE International Conference on Imaging Systems and Techniques (IST), Krakow, Poland, 16–18 October 2018; pp. 1–6. [Google Scholar]
- Cui, R.; Liu, H.; Zhang, C. A deep neural framework for continuous sign language recognition by iterative training. IEEE Trans. Multimed. 2019, 21, 1880–1891. [Google Scholar] [CrossRef]
- Papastratis, I.; Dimitropoulos, K.; Konstantinidis, D.; Daras, P. Continuous Sign Language Recognition Through Cross-Modal Alignment of Video and Text Embeddings in a Joint-Latent Space. IEEE Access 2020, 8, 91170–91180. [Google Scholar] [CrossRef]
- Koller, O.; Camgoz, N.C.; Ney, H.; Bowden, R. Weakly Supervised Learning with Multi-Stream CNN-LSTM-HMMs to Discover Sequential Parallelism in Sign Language Videos. IEEE Trans. Pattern Anal. Mach. Intell. 2020, 42, 2306–2320. [Google Scholar] [CrossRef]
- Rastgoo, R.; Kiani, K.; Escalera, S. Real-time isolated hand sign language recognition using deep networks and SVD. J. Ambient. Intell. Humaniz. Comput. 2021, 2021, 1–21. [Google Scholar]
- Rajam, P.S.; Balakrishnan, G. Real time Indian Sign Language Recognition System to aid deaf-dumb people. In Proceedings of the 2011 IEEE 13th International Conference on Communication Technology, Jinan, China, 25–28 September 2011; pp. 737–742. [Google Scholar]
- Koller, O.; Forster, J.; Ney, H. Continuous sign language recognition: Towards large vocabulary statistical recognition systems handling multiple signers. Comput. Vis. Image Underst. 2015, 141, 108–125. [Google Scholar] [CrossRef]
- Buehler, P.; Zisserman, A.; Everingham, M. Learning sign language by watching TV (using weakly aligned subtitles). In Proceedings of the 2009 IEEE Conference on Computer Vision and Pattern Recognition, Miami, FL, USA, 20–25 June 2009; pp. 2961–2968. [Google Scholar]
- Zhang, J.; Zhou, W.; Xie, C.; Pu, J.; Li, H. Chinese sign language recognition with adaptive HMM. In Proceedings of the 2016 IEEE International Conference on Multimedia and Expo (ICME), Seattle, WA, USA, 11–15 July 2016; pp. 1–6. [Google Scholar]
- Koller, O.; Zargaran, O.; Ney, H.; Bowden, R. Deep sign: Hybrid CNN-HMM for continuous sign language recognition. In Proceedings of the Proceedings of the British Machine Vision Conference 2016, York, UK, 19–22 September 2016. [Google Scholar]
- Wang, S.B.; Quattoni, A.; Morency, L.P.; Demirdjian, D.; Darrell, T. Hidden conditional random fields for gesture recognition. In Proceedings of the 2006 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’06), New York, NY, USA, 17–22 June 2006; Volume 2, pp. 1521–1527. [Google Scholar]
- Cheng, K.L.; Yang, Z.; Chen, Q.; Tai, Y.W. Fully Convolutional Networks for Continuous Sign Language Recognition. In Proceedings of the European Conference on Computer Vision; Springer: Cham, Switzerland, 2020; pp. 697–714. [Google Scholar]
- Adaloglou, N.; Chatzis, T.; Papastratis, I.; Stergioulas, A.; Papadopoulos, G.T.; Zacharopoulou, V.; Xydopoulos, G.J.; Atzakas, K.; Papazachariou, D.; Daras, P. A comprehensive study on sign language recognition methods. arXiv 2020, arXiv:2007.12530. [Google Scholar]
- Khan, M.A.; Kim, J. Toward Developing Efficient Conv-AE-Based Intrusion Detection System Using Heterogeneous Dataset. Electronics 2020, 9, 1771. [Google Scholar] [CrossRef]
- Feichtenhofer, C. X3d: Expanding architectures for efficient video recognition. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020; pp. 203–213. [Google Scholar]
- Abdel-Basset, M.; Hawash, H.; Chakrabortty, R.K.; Ryan, M.J. Semi-supervised Spatio-Temporal Deep Learning for Intrusions Detection in IoT Networks. IEEE Internet Things J. 2021, 1. [Google Scholar] [CrossRef]
- Liu, S.; Zhao, L.; Wang, X.; Xin, Q.; Zhao, J.; Guttery, D.S.; Zhang, Y.D. Deep Spatio-Temporal Representation and Ensemble Classification for Attention deficit/Hyperactivity disorder. IEEE Trans. Neural Syst. Rehabil. Eng. 2020, 29, 1–10. [Google Scholar] [CrossRef]
- Pan, Z.; Yu, W.; Yi, X.; Khan, A.; Yuan, F.; Yuhui, Z. Recent Progress on Generative Adversarial Networks (GANs): A Survey. IEEE Access 2019. [Google Scholar] [CrossRef]
- Goodfellow, I.; Pouget-Abadie, J.; Mirza, M.; Xu, B.; Warde-Farley, D.; Ozair, S.; Courville, A.; Bengio, Y. Generative adversarial nets. Adv. Neural Inf. Process. Syst. 2014, 2, 2672–2680. [Google Scholar]
- Wang, T.C.; Liu, M.Y.; Tao, A.; Liu, G.; Catanzaro, B.; Kautz, J. Few-shot Video-to-Video Synthesis. arXiv 2019, arXiv:1910.12713. [Google Scholar]
- Stoll, S.; Cihan, C.N.; Hadfield, S.; Bowden, R. Text2Sign: Towards sign language production using neural machine translation and generative adversarial networks. Int. J. Comput. Vis. 2020, 128, 891–908. [Google Scholar] [CrossRef]
- Ahsan, U.; Sun, C.; Essa, I. Discrimnet: Semi-supervised action recognition from videos using generative adversarial networks. arXiv 2018, arXiv:1801.07230. [Google Scholar]
- Wang, L.; Ding, Z.; Tao, Z.; Liu, Y.; Fu, Y. Generative Multi-View Human Action Recognition. In Proceedings of the IEEE International Conference on Computer Vision; 2019; pp. 6212–6221. Available online: https://openaccess.thecvf.com/content_ICCV_2019/html/Wang_Generative_Multi-View_Human_Action_Recognition_ICCV_2019_paper.html (accessed on 31 March 2021).
- Von Agris, U.; Zieren, J.; Canzler, U.; Bauer, B.; Kraiss, K.F. Recent developments in visual sign language recognition. Univers. Access Inf. Soc. 2008, 6, 323–362. [Google Scholar] [CrossRef]
- Theodorakis, S.; Katsamanis, A.; Maragos, P. Product-HMMs for automatic sign language recognition. In Proceedings of the 2009 IEEE International Conference on Acoustics, Speech and Signal Processing, Taipei, Taiwan, 19–24 April 2009; pp. 1601–1604. [Google Scholar]
- Koller, O.; Ney, H.; Bowden, R. Deep hand: How to train a CNN on 1 million hand images when your data is continuous and weakly labelled. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 3793–3802. [Google Scholar]
- Koller, O.; Zargaran, S.; Ney, H.; Bowden, R. Deep Sign: Enabling Robust Statistical Continuous Sign Language Recognition via Hybrid CNN-HMMs. Int. J. Comput. Vis. 2018, 126, 1311–1325. [Google Scholar] [CrossRef]
- Koller, O.; Zargaran, S.; Ney, H. Re-sign: Re-aligned end-to-end sequence modelling with deep recurrent CNN-HMMs. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 4297–4305. [Google Scholar]
- Graves, A.; Fernández, S.; Gomez, F.; Schmidhuber, J. Connectionist temporal classification: Labelling unsegmented sequence data with recurrent neural networks. In Proceedings of the 23rd International Conference on Machine Learning, Pittsburgh, PA, USA, 25–29 June2006; pp. 369–376. [Google Scholar]
- Cui, R.; Liu, H.; Zhang, C. Recurrent convolutional neural networks for continuous sign language recognition by staged optimization. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 7361–7369. [Google Scholar]
- Yang, Z.; Shi, Z.; Shen, X.; Tai, Y.W. SF-Net: Structured Feature Network for Continuous Sign Language Recognition. arXiv 2019, arXiv:1908.01341. [Google Scholar]
- Carreira, J.; Zisserman, A. Quo vadis, action recognition. A new model and the kinetics dataset. arXiv 2017, arXiv:1705.07750. [Google Scholar]
- Huang, J.; Zhou, W.; Zhang, Q.; Li, H.; Li, W. Video-based sign language recognition without temporal segmentation. In Proceedings of the Thirty-Second AAAI Conference on Artificial Intelligence, New Orleans, LA, USA, 2–7 February 2018. [Google Scholar]
- Wang, S.; Guo, D.; Zhou, W.g.; Zha, Z.J.; Wang, M. Connectionist temporal fusion for sign language translation. In Proceedings of the 26th ACM International Conference on Multimedia, Seoul, Korea, 22–26 October 2018; pp. 1483–1491. [Google Scholar]
- Pu, J.; Zhou, W.; Li, H. Dilated Convolutional Network with Iterative Optimization for Continuous Sign Language Recognition. IJCAI 2018, 3, 7. [Google Scholar]
- Zhou, H.; Zhou, W.; Li, H. Dynamic Pseudo Label Decoding for Continuous Sign Language Recognition. In Proceedings of the 2019 IEEE International Conference on Multimedia and Expo (ICME), Shanghai, China, 8–12 July 2019; pp. 1282–1287. [Google Scholar]
- Pu, J.; Zhou, W.; Li, H. Iterative alignment network for continuous sign language recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 4165–4174. [Google Scholar]
- Cuturi, M.; Blondel, M. Soft-DTW: A differentiable loss function for time-series. In Proceedings of the 34th International Conference on Machine Learning, Sydney, Australia, 6–11 August 2017. [Google Scholar]
- Guo, D.; Wang, S.; Tian, Q.; Wang, M. Dense temporal convolution network for sign language translation. In Proceedings of the 28th International Joint Conference on Artificial Intelligence, Macao, China, 10–16 August 2019; pp. 744–750. [Google Scholar]
- Camgoz, N.C.; Hadfield, S.; Koller, O.; Bowden, R. Subunets: End-to-end hand shape and continuous sign language recognition. In Proceedings of the 2017 IEEE International Conference on Computer Vision (ICCV), Venice, Italy, 22–29 October 2017; pp. 3075–3084. [Google Scholar]
- Zhou, H.; Zhou, W.; Zhou, Y.; Li, H. Spatial-Temporal Multi-Cue Network for Continuous Sign Language Recognition. AAAI 2020, 13009–13016. [Google Scholar] [CrossRef]
- Zhou, M.; Ng, M.; Cai, Z.; Cheung, K.C. Self-Attention-based Fully-Inception Networks for Continuous Sign Language Recognition. Santiago de Compostela 2020, 8. [Google Scholar] [CrossRef]
- Park, J.S.; Rohrbach, M.; Darrell, T.; Rohrbach, A. Adversarial inference for multi-sentence video description. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 6598–6608. [Google Scholar]
- Liu, A.H.; Lee, H.; Lee, L. Adversarial Training of End-to-end Speech Recognition Using a Criticizing Language Model. In Proceedings of the ICASSP 2019—2019 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Brighton, UK, 12–17 May 2019; pp. 6176–6180. [Google Scholar]
- Jiang, Z.; Crookes, D.; Green, B.D.; Zhao, Y.; Ma, H.; Li, L.; Zhang, S.; Tao, D.; Zhou, H. Context-aware mouse behavior recognition using hidden markov models. IEEE Trans. Image Process. 2018, 28, 1133–1148. [Google Scholar] [CrossRef]
- Huang, C.; Kairouz, P.; Sankar, L. Generative adversarial privacy: A data-driven approach to information-theoretic privacy. In Proceedings of the 2018 52nd Asilomar Conference on Signals, Systems, and Computers, Pacific Grove, CA, USA, 28–31 October 2018; pp. 2162–2166. [Google Scholar]
- Zha, Z.J.; Liu, D.; Zhang, H.; Zhang, Y.; Wu, F. Context-aware visual policy network for fine-grained image captioning. IEEE Trans. Pattern Anal. Mach. Intell. 2019. [Google Scholar] [CrossRef] [PubMed]
- Vaswani, A.; Shazeer, N.; Parmar, N.; Uszkoreit, J.; Jones, L.; Gomez, A.N.; Kaiser, Ł.; Polosukhin, I. Attention is all you need. arXiv 2017, arXiv:1706.03762. [Google Scholar]
- Yin, K.; Read, J. Attention is All You Sign: Sign Language Translation with Transformers. In Proceedings of the European Conference on Computer Vision (ECCV) Workshop on Sign Language Recognition, Translation and Production (SLRTP), 23 August 2020; Available online: http://slrtp.com/ (accessed on 31 March 2021).
- Wilks, S.S. The large-sample distribution of the likelihood ratio for testing composite hypotheses. Ann. Math. Stat. 1938, 9, 60–62. [Google Scholar] [CrossRef]
- Papineni, K.; Roukos, S.; Ward, T.; Zhu, W.J. BLEU: A method for automatic evaluation of machine translation. In Proceedings of the 40th Annual Meeting of the Association for Computational Linguistics, Philadelphia, PA, USA, 12 July 2002; pp. 311–318. [Google Scholar]
- Banerjee, S.; Lavie, A. METEOR: An automatic metric for MT evaluation with improved correlation with human judgments. In Proceedings of the Acl Workshop on Intrinsic and Extrinsic Evaluation Measures for Machine Translation and/or Summarization, Ann Arbor, MI, USA, 29 June 2005; pp. 65–72. [Google Scholar]
- Ioffe, S.; Szegedy, C. Batch normalization: Accelerating deep network training by reducing internal covariate shift. arXiv 2015, arXiv:1502.03167. [Google Scholar]
- Klein, G.; Kim, Y.; Deng, Y.; Senellart, J.; Rush, A.M. OpenNMT: Open-Source Toolkit for Neural Machine Translation. ACL Syst. Demonstr. 2017. Available online: https://www.aclweb.org/anthology/P17-4012 (accessed on 1 April 2021).
- Paszke, A.; Gross, S.; Massa, F.; Lerer, A.; Bradbury, J.; Chanan, G.; Killeen, T.; Lin, Z.; Gimelshein, N.; Antiga, L.; et al. Pytorch: An imperative style, high-performance deep learning library. arXiv 2019, arXiv:1912.01703. [Google Scholar]
- Shamsolmoali, P.; Zareapoor, M.; Shen, L.; Sadka, A.H.; Yang, J. Imbalanced data learning by minority class augmentation using capsule adversarial networks. Neurocomputing 2020. [Google Scholar] [CrossRef]
- Zareapoor, M.; Shamsolmoali, P.; Yang, J. Oversampling adversarial network for class-imbalanced fault diagnosis. Mech. Syst. Signal Process. 2021, 149, 107175. [Google Scholar] [CrossRef]
- Sampath, V.; Maurtua, I.; Martín, J.J.A.; Gutierrez, A. A survey on generative adversarial networks for imbalance problems in computer vision tasks. J. Big Data 2021, 8, 1–59. [Google Scholar] [CrossRef] [PubMed]
- Pant, H.; Soman, S. Complexity Controlled Generative Adversarial Networks. arXiv 2020, arXiv:2011.10223. [Google Scholar]
- Wu, Y.; Tan, X.; Lu, T. A New Multiple-Distribution GAN Model to Solve Complexity in End-to-End Chromosome Karyotyping. Complexity 2020, 2020, 1–11. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| SLRGAN (Generator Only) | Validation | Test |
|---|---|---|
| 2D-CNN+TCL (without BLSTM) | 30.1 | 29.8 |
| 2D-CNN+BLSTM (without TCL) | 27.9 | 27.7 |
| 2D-CNN+TCL+LSTM | 26.0 | 25.8 |
| 2D-CNN+TCL+BLSTM | 25.1 | 25.0 |
| Method | Validation | Test |
|---|---|---|
| SLRGAN (generator only) | 25.1 | 25.0 |
| SLRGAN (gloss-level) | 23.8 | 23.9 |
| SLRGAN (sentence-level) | 23.9 | 24.0 |
| SLRGAN | 23.7 | 23.4 |
| Method | Validation | Test |
|---|---|---|
| Staged-Opt [34] | 39.4 | 38.7 |
| CNN-Hybrid [14] | 38.3 | 38.8 |
| Dilated [39] | 38.0 | 37.3 |
| Align-iOpt [41] | 37.1 | 36.7 |
| DenseTCN [43] | 35.9 | 36.5 |
| SF-Net [35] | 35.6 | 34.9 |
| DPD [40] | 35.6 | 34.5 |
| Fully-Inception Networks [46] | 31.7 | 31.3 |
| Re-Sign [32] | 27.1 | 26.8 |
| CNN-TEMP-RNN (RGB) [6] | 23.8 | 24.4 |
| CrossModal [7] | 23.9 | 24.0 |
| Fully-Conv-Net [16] | 23.7 | 23.9 |
| SLRGAN | 23.7 | 23.4 |
| Method | Test |
|---|---|
| LS-HAN [37] | 17.3 |
| DenseTCN [43] | 14.3 |
| CTF [38] | 11.2 |
| Align-iOpt [41] | 6.1 |
| DPD [40] | 4.7 |
| SF-Net [35] | 3.8 |
| Fully-Conv-Net [16] | 3.0 |
| CrossModal [7] | 2.4 |
| SLRGAN | 2.1 |
| GSL SI | GSL SD | |||
|---|---|---|---|---|
| Method | Validation | Test | Validation | Test |
| CrossModal [7] | 3.56 | 3.52 | 38.21 | 41.98 |
| SLRGAN | 2.87 | 2.98 | 36.91 | 37.11 |
| Deaf-to-hearing SLRGAN | 2.56 | 2.86 | 33.75 | 36.68 |
| Deaf-to-Deaf SLRGAN | 2.72 | 2.26 | 34.52 | 36.05 |
| GSL SI | GSL SD | |||
|---|---|---|---|---|
| Test | Test | |||
| Method | BLEU-4 | METEOR | BLEU-4 | METEOR |
| Ground Truth | 85.17 | 85.89 | 21.89 | 28.47 |
| SLRGAN+Transformer | 84.24 | 84.58 | 19.34 | 25.90 |
| Deaf-to-hearing SLRGAN+Transformer | 84.91 | 85.26 | 20.26 | 26.71 |
| Deaf-to-Deaf SLRGAN+Transformer | 84.96 | 85.48 | 20.33 | 26.42 |
| Method | Gloss | Translation |
| Ground Truth | HELLO I CAN HELP YOU HOW | Hello, how can I help you? |
| SLRGAN+Transformer | HELLO I CAN HELP | Hello, can I help? |
| Deaf-to-hearing SLRGAN+Transformer | HELLO I CAN HELP YOU | Hello, can I help you? |
| Deaf-to-Deaf SLRGAN+Transformer | HELLO I CAN HELP YOU HOW | Hello, can I help you how? |
| Ground Truth | YOU_GIVE_MY PAPER APPROVAL DOCTOR OWNER OR HOSPITAL | The secretariat will give you the opinion. |
| SLRGAN+Transformer | ME PAPER APPROVAL DOCTOR | Medical opinion. |
| Deaf-to-hearing SLRGAN+Transformer | YOU_GIVE_MY PAPER APPROVAL DOCTOR OWNER | Secretariat will give you the opinion. |
| Deaf-to-Deaf SLRGAN+Transformer | YOU_GIVE_MY PAPER APPROVAL DOCTOR | The secretariat will give you the opinion |
| Ground Truth | YOU HAVE A CERTIFICATE BOSS | You have an employment certificate. |
| SLRGAN+Transformer | YOU HAVE CERTIFICATE DOCTOR OWNER | You have a national team certificate |
| Deaf-to-hearing SLRGAN+Transformer | YOU HAVE CERTIFICATE BOSS | You have employer certificate. |
| Deaf-to-Deaf SLRGAN+Transformer | YOU HAVE CERTIFICATE | You have a certificate. |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Papastratis, I.; Dimitropoulos, K.; Daras, P. Continuous Sign Language Recognition through a Context-Aware Generative Adversarial Network. Sensors 2021, 21, 2437. https://doi.org/10.3390/s21072437
Papastratis I, Dimitropoulos K, Daras P. Continuous Sign Language Recognition through a Context-Aware Generative Adversarial Network. Sensors. 2021; 21(7):2437. https://doi.org/10.3390/s21072437
Chicago/Turabian StylePapastratis, Ilias, Kosmas Dimitropoulos, and Petros Daras. 2021. "Continuous Sign Language Recognition through a Context-Aware Generative Adversarial Network" Sensors 21, no. 7: 2437. https://doi.org/10.3390/s21072437
APA StylePapastratis, I., Dimitropoulos, K., & Daras, P. (2021). Continuous Sign Language Recognition through a Context-Aware Generative Adversarial Network. Sensors, 21(7), 2437. https://doi.org/10.3390/s21072437