
Fuzzy Logic for Intelligent Control System Using Soft Computing Applications



Abstract
:1. Introduction
2. Related Work
3. Materials and Methods
3.1. Fuzzy Controllers’ Processor

3.2. Classification of Fuzzy Processor
3.3. Fuzzy Component
- Fuzzy sensors, which ensure the representation of measurements as fuzzy subsets.
- Fuzzy actuators, which operate in the real world, are depended on the fuzzy subsets they receive at the input.
- Inference fuzzy components that can perform fuzzy calculations. They produce new fuzzy subsets obtained from the received fuzzy subsets.
3.4. Fuzzy Cells
3.5. Mathematical Models for Fuzzy Components
3.5.1. Real–Fuzzy Symbolic Transformation
3.5.2. Symbolic Fuzzy Inference
3.5.3. Fuzzy–Real Symbolic Transformation
3.6. Fuzzy Cell Configuration
3.6.1. Use a Local Compiler and Soft Computing
3.6.2. Soft Computing Implementation of Fuzzy Applied Cell Control Technology
- ⮚ Declaration type variables
- ⮚ Initialization type variables
- ⮚ Execution variables
4. Results
4.1. Agent-Based Modeling and Fuzzy Logic for Simulating Pedestrian Crowds in Panic Decision-Making Situations
- Number of pedestrians already on the QUEUE escape route;
- Number of pedestrians who will arrive ARRIVAL.
- The evacuation time interval for each pedestrian passing through the EXTENSION escape route.
- For ARRIVAL: ALMOST (AM), FEW (FE), MANY (MA), TOO MANY (TMA);
- For QUEUE: VERY SMALL (VSM), SMALL (SM), MEDIUM (ME), LARGE (LA);
- For EXTENSION: ZERO (ZE), SHORT (SH), MEDIUM (ME), LONGER (LO);
- If ARRIVAL is AL and QUEUE is VSM, then EXTENSION is ZE;
- If ARRIVAL is AL and QUEUE is SM, then EXTENSION is ZE;
- If ARRIVAL is AL and QUEUE is ME, then EXTENSION is ZE;
- If ARRIVAL is AL and QUEUE is LA, then EXTENSION is ZE;
- If ARRIVAL is FE and QUEUE is VSM, then EXTENSION is SH;
- If ARRIVAL is FE and QUEUE is SM, then EXTENSION is SH;
- If ARRIVAL is FE and QUEUE is ME, then EXTENSION is ZE;
- If ARRIVAL is FE and QUEUE is LA, then EXTENSION is ZE;
- If ARRIVAL is MA and QUEUE is VSM, then EXTENSION is ME;
- If ARRIVAL is MA and QUEUE is SM, then EXTENSION is ME;
- If ARRIVAL is MA and QUEUE is ME, then EXTENSION is SH;
- If ARRIVAL is MA and QUEUE is LA, then EXTENSION is ZE;
- If ARRIVAL is TMA and QUEUE is VSM, then EXTENSION is LO;
- If ARRIVAL is TMA and QUEUE is SM, then EXTENSION is ME;
- If ARRIVAL is TMA and QUEUE is ME, then EXTENSION is ME;
- If ARRIVAL is TMA and QUEUE is LA, then EXTENSION is SH.
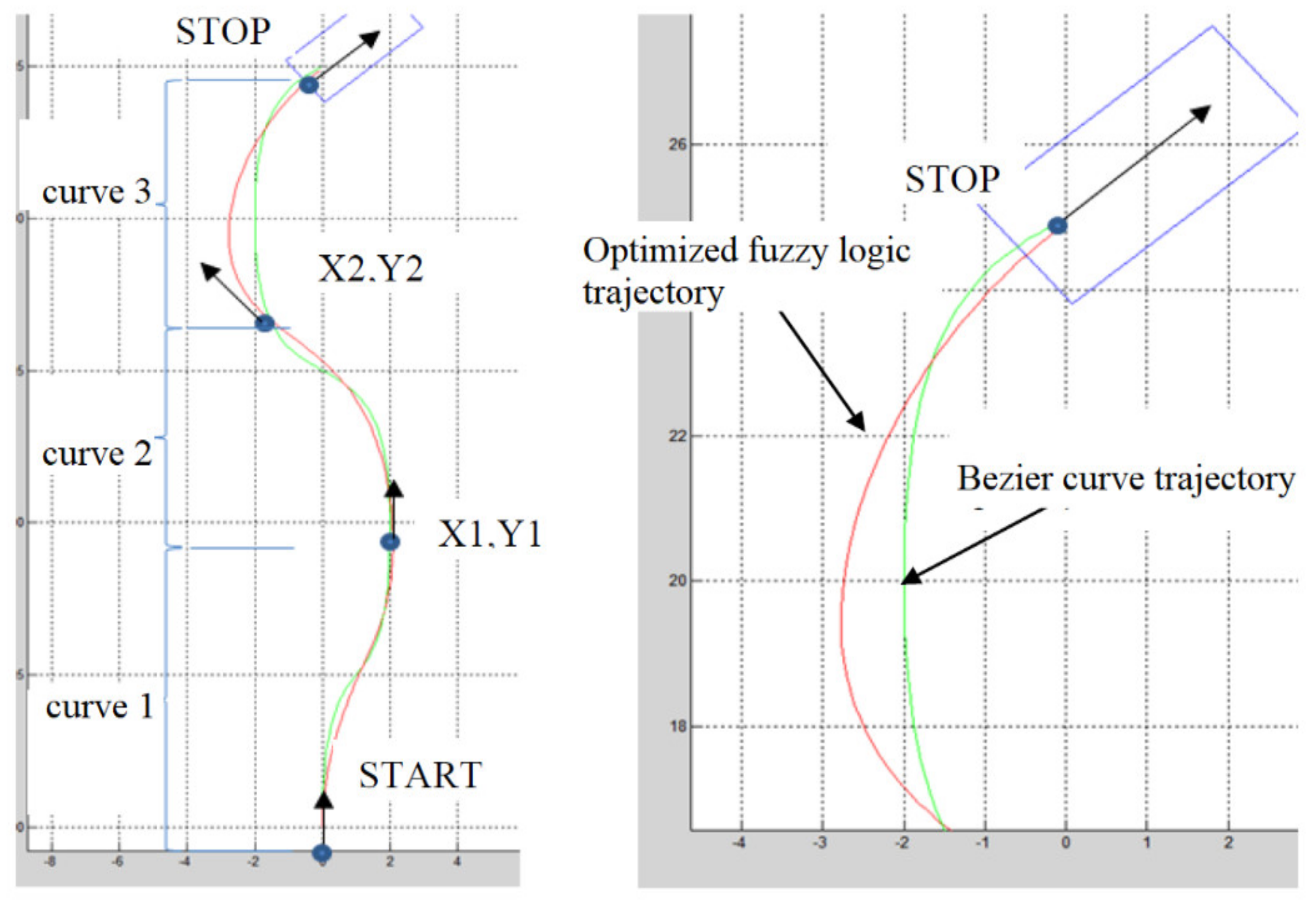
4.2. Fuzzy Controller for Mobile Robot
5. Discussion
- ⮚ Defining the concept of distributed fuzzy control.
- ⮚ Defining fuzzy components in a system with distributed fuzzy control.
- ⮚ Defining the operations of symbolic fusing, symbolic inference and fuzzy–real symbolic transformation based on the notions of fuzzy meaning and fuzzy description.
- ⮚ Defining the elements of an interoperable language Fuzzy Applied Cell Control Technology for the development of fuzzy components with distributed intelligence.
6. Conclusions
Future Research Directions
7. Patents
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Sharma, R.; Gaur, P.; Mittal, A.P. Design of two-layered fractional order fuzzy logic controllers applied to robotic manipulator with variable payload. Appl. Soft Comput. 2016, 47, 565–576. [Google Scholar] [CrossRef]
- Hu, H.; Wang, X.; Chen, L. Impedance with Finite-Time Control Scheme for Robot-Environment Interaction. Math. Probl. Eng. 2020, 2020, 2796590. [Google Scholar] [CrossRef]
- Saleki, A.; Mehdi, M. Model-free control of electrically driven robot manipulators using an extended state observer. Comput. Electr. Eng. 2020, 87, 106768. [Google Scholar] [CrossRef]
- Abror, B.; Hyun, K.; Myeong, C.; Rymduck, O.; Akmal, A.; Heung, S. Application of fuzzy logic for problem of evaluating states of a computing system. Appl. Sci. 2019, 9, 3021. [Google Scholar] [CrossRef] [Green Version]
- Bhatia, V.; Kalaichelvi, V.; Karthikeyan, R. Application of a Novel Fuzzy Logic Controller for a 5-DOF Articulated Anthropomorphic Robot. In Proceedings of the 2015 IEEE International Conference on Research in Computational Intelligence and Communication Networks (ICRCICN), Kolkata, India, 20–22 November 2015. [Google Scholar]
- Ghanooni, P.; Yazdanib, A.M.; Mahmoudi, A.; MahmoudZadeh, S.; Ahmadi Movaheded, M.; Fathi, M. Robust precise trajectory tracking of hybrid stepper motor using adaptive critic-based neuro-fuzzy controller. Comput. Electr. Eng. 2020, 81, 106535. [Google Scholar] [CrossRef]
- Mahmoodabadi, M.J.; Abedzadeh Maafi, R.; Taherkhorsandi, M. An optimal adaptive robust PID controller subject to fuzzy rules and sliding modes for MIMO uncertain chaotic systems. Appl. Soft Comput. 2017, 52, 1191–1199. [Google Scholar] [CrossRef]
- Edalati, L.; Khaki Sedigh, A.; Aliyari Shooredeli, M.; Moarefianpour, A. Adaptive fuzzy dynamic surface control of nonlinear systems with input saturation and time-varying output constraints. Mech. Syst. Signal. Process. 2018, 100, 311–329. [Google Scholar] [CrossRef]
- Mamdani, E.H. Application of fuzzy algorithms for control of simple dynamic plant. Proc. Inst. Electr. Eng. 1974, 121, 1585–1588. [Google Scholar] [CrossRef]
- Jassbi, J.J.; Serra, P.J.A.; Ribeiro, R.A.; Donati, A. A Comparison of Mandani and Sugeno Inference Systems for a Space Fault Detection Application. In Proceedings of the 2006 World Automation Congress, Budapest, Hungary, 24–26 July 2006; pp. 1–8. [Google Scholar]
- Zhang, Y.; Wang, J.; Han, D.; Wu, H.; Zhou, R. Fuzzy-logic based distributed energy-efficient clustering algorithm for wireless sensor networks. Sensors 2017, 17, 1554. [Google Scholar] [CrossRef] [Green Version]
- Yuste-Delgado, A.J.; Cuevas-Martinez, J.C.; Triviño-Cabrera, A. EUDFC-Enhanced Unequal Distributed Type-2 Fuzzy Clustering Algorithm. IEEE Sens. J. 2019, 19, 4705–4716. [Google Scholar] [CrossRef]
- Baghli, F.Z.; Bakkali, E.L.; Lakhal, Y. Multi-input multi-output fuzzy logic controller for complex system: Application on two-links manipulator. Procedia Technol. 2015, 19, 607–614. [Google Scholar] [CrossRef] [Green Version]
- Xu, J.X.; Guo, Z.Q.; Lee, T.H. Design and implementation of a Takagi-Sugeno-Type fuzzy logic controller on a two-wheeled mobile robot. IEEE Trans. Ind. Electron. 2013, 60, 5717–5728. [Google Scholar] [CrossRef]
- Huang, C.-H.; Wang, W.-J.; Chiu, C.-H. Design and implementation of fuzzy control on a two-wheel inverted pendulum. IEEE Trans. Ind. Electron. 2011, 58, 2988–3001. [Google Scholar] [CrossRef]
- Chih, H.; Ya, F. Design of Takagi-Sugeno fuzzy control scheme for real word system control. Sustainability 2019, 11, 3855. [Google Scholar] [CrossRef] [Green Version]
- Su, X.; Wu, Y.; Song, J.; Yuan, P. A Fuzzy Path Selection Strategy for Aircraft Landing on a Carrier. Appl. Sci. 2018, 8, 779. [Google Scholar] [CrossRef] [Green Version]
- Zavlangas, P.G.; Tzafestas, S.G.; Althoefer, K. Fuzzy Obstacle Avoidance and Navigation for Omnidirectional Mobile Robots; European Symposium on Intelligent Techniques: Aachen, Germany, 2000. [Google Scholar]
- Nadour, M.; Boumehraz, M.; Cherroun, L.; Puig Cayuela, V. Hybrid type-2 fuzzy logic obstacle avoidance system based on horn-schunck method. Electroteh. Electron. Autom. 2019, 67, 45–51. [Google Scholar]
- Jahanshahi, H.; Jafarzadeh, M.; Sari, N.N.; Pham, V.T.; Huynh, V.V.; Nguyen, X.Q. Robot motion planning in an unknown environment with danger space. Electronics 2019, 8, 201. [Google Scholar] [CrossRef] [Green Version]
- Lin, J.; Zhou, J.; Lu, M.; Wang, H.; Yi, A. Design of Robust Adaptive Fuzzy Controller for a Class of Single-Input Single Output (SISO) Uncertain Nonlinear System. Math. Probl. Eng. 2020, 2020, 6178678. [Google Scholar] [CrossRef] [Green Version]
- Rossomando, F.; Serrano, E.; Soria, C.; Scaglia, G. Neural Dynamics Variations Observer Designed for Robot Manipulator Control Using a Novel Saturated Control Technique. Math. Probl. Eng. 2020, 2020, 3240210. [Google Scholar] [CrossRef]
- Chatterjee, A.; Watanabe, K. An adaptive fuzzy strategy for motion control of robot manipulators. Soft Comput. 2005, 9, 185–193. [Google Scholar] [CrossRef]
- Bandara, R.N.; Gaspe, S. Fuzzy logic controller design for an Unmanned Aerial Vehicle. In Proceedings of the IEEE International Conference on Information and Automation for Sustainability, Galle, Sri Lanka, 16–19 December 2016; pp. 1–5. [Google Scholar]
- Prakash, M.; Jajulwar, K. Design of adaptive fuzzy tracking controller for Autonomous navigation system. Int. J. Recent Trend Eng. Res. 2016, 2, 268–275. [Google Scholar]
- Xue, H.; Zhang, Z.; Wu, M.; Chen, P. Fuzzy Controller for Autonomous Vehicle Based on Rough Sets. IEEE Access 2019, 7, 147350–147361. [Google Scholar] [CrossRef]
- Karras, G.C.; Fourlas, G.K. Model Predictive Fault Tolerant Control for Omni-directional Mobile Robots. J. Intell. Robot. Syst. 2020, 97, 635–655. [Google Scholar] [CrossRef]
- Siegwart, R.; Nourbakhsh, I.R.; Scaramuzza, D. Introduction to Autonomous Mobile Robots; MIT Press: Cambridge, MA, USA, 2011. [Google Scholar]
- Mac, T.; Copot, C.; De Keyser, R.; Tran, T.; Vu, T. MIMO fuzzy control for autonomous mobile robot. J. Autom. Control. Eng. 2016, 4, 65–70. [Google Scholar]
- Bobyr, M.V.; Kulabukhov, S.A.; Milostnaya, N.A. Fuzzy control system of robot angular attitude. In Proceedings of the 2nd International Conference on Industrial Engineering, Applications and Manufacturing, Chelyabinsk, Russia, 19–20 May 2016; pp. 1–6. [Google Scholar]
- Li, K.; Zhao, X.; Sun, S.; Tan, M. Robust target tracking and following for a mobile robot. Int. J. Robot. Autom. 2018, 33, 4. [Google Scholar] [CrossRef]
- Pandey, A.; Pandey, S.; Parhi, D. Mobile robot navigation and obstacle avoidance techniques: A review. Int. Robot. Autom. J. 2017, 2, 3. [Google Scholar] [CrossRef] [Green Version]
- Steels, L.; Brooks, R. The Artificial Life Route to Artificial Intelligence: Building Embodied, Situated Agents; Routledge: Oxford, UK, 2018. [Google Scholar]
- Kolbari, H.; Sadeghnejad, S.; Parizi, A.T.; Rashidi, S.; Baltes, J.H. Extended fuzzy logic controller for uncertain teleoperation system. In Proceedings of the 4th International Conference on Robotics and Mechatronics, Tehran, Iran, 26–28 October 2016; pp. 78–83. [Google Scholar]
- Benli, E.; Motai, Y.; Rogers, J. Human behavior-based target tracking with an omni-directional thermal camera. IEEE Trans. Cogn. Dev. Syst. 2019, 11, 36–50. [Google Scholar] [CrossRef]
- Zadeh, L. Fuzzy logic = computing with words. IEEE Trans. Fuzzy Syst. 1996, 4, 103–111. [Google Scholar] [CrossRef] [Green Version]
- Herrera, F.; Herrera-Viedma, E. Linguistic Decision Analysis: Steps for Solving Decision Problems under Linguistic Information. Fuzzy Sets Syst. 2000, 115, 67–82. [Google Scholar] [CrossRef]
- Versaci, M.; Calcagno, S.; Cacciola, M.; Morabito, F.; Palamara, I.; Pellicanò, D. Innovative Fuzzy Techniques for Characterizing Defects in Ultrasonic Nondestructive Evaluation. In Ultrasonic Nondestructive Evaluation Systems; Burrascano, P., Callegari, S., Montisci, A., Ricci, M., Versaci, M., Eds.; Springer: Cham, Switzerland, 2015; ISBN 978-3-319-10565-9. [Google Scholar] [CrossRef]
- Roboaca, S.; Dumitrescu, C.; Mantan, I. Aircraft Trajectory Tracking using Radar Equipment with Fuzzy Logic Algorithm. Mathematics 2020, 8, 207. [Google Scholar] [CrossRef] [Green Version]
- Helbing, D.; Farkas, S.; Vicsek, T. Simulating Dynamic Features of Escape Panic. Nature 2020, 407, 487–490. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Abdulla, A.; Maria, J.; Francisco, M.; Arturo, E.; Jose, M. An Appearance-Based Tracking Algorithm for Aerial Search and Rescue Purposes. Sensors 2019, 19, 652. [Google Scholar] [CrossRef] [Green Version]
- Minea, M.; Dumitrescu, C.; Costea, I.; Chiva, I.; Semenescu, A. Developing a Solution for Mobility and Distribution Analysis Based on Bluetooth and Artificial Intelligence. Sensors 2020, 20, 7327. [Google Scholar] [CrossRef] [PubMed]
- Terano, T.; Asal, K.; Sugeno, M. Fuzzy Systems Theory and Its Applications, 1st ed.; Academic Press: San Diego, CA, USA, 1992. [Google Scholar]
- Kasabanov, N.; Kozma, R. Neuro-Fuzzy Techniques for Intelligent Information Systems; Springer: Berlin/Heidelberg, Germany, 1999; Volume 30, 449p, ISBN1 -10 3790811874. ISBN2 -13 978-3790811872. [Google Scholar]
- Kahraman, C.; Kabak, O. Fuzzy Statistical Decisio-Making: Theory and Applications; Series: Studies in Fuzziness and Soft Computing; Springer: Berlin/Heidelberg, Germany, 2018; ISBN 9783319817934. [Google Scholar]

































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ARRIVAL | VSM | QUEUE SM | ME | LA |
|---|---|---|---|---|
| AL | ZE | ZE | ZE | ZE |
| FEW | SH | SH | ZE | ZE |
| MA | ME | ME | SH | ZE |
| TMA | LO | ME | ME | SH |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dumitrescu, C.; Ciotirnae, P.; Vizitiu, C. Fuzzy Logic for Intelligent Control System Using Soft Computing Applications. Sensors 2021, 21, 2617. https://doi.org/10.3390/s21082617
Dumitrescu C, Ciotirnae P, Vizitiu C. Fuzzy Logic for Intelligent Control System Using Soft Computing Applications. Sensors. 2021; 21(8):2617. https://doi.org/10.3390/s21082617
Chicago/Turabian StyleDumitrescu, Catalin, Petrica Ciotirnae, and Constantin Vizitiu. 2021. "Fuzzy Logic for Intelligent Control System Using Soft Computing Applications" Sensors 21, no. 8: 2617. https://doi.org/10.3390/s21082617
APA StyleDumitrescu, C., Ciotirnae, P., & Vizitiu, C. (2021). Fuzzy Logic for Intelligent Control System Using Soft Computing Applications. Sensors, 21(8), 2617. https://doi.org/10.3390/s21082617