
Star Identification Based on Multilayer Voting Algorithm for Star Sensors

Abstract
:1. Introduction
2. Algorithm Description
2.1. Triangle Unit and Feature Extraction
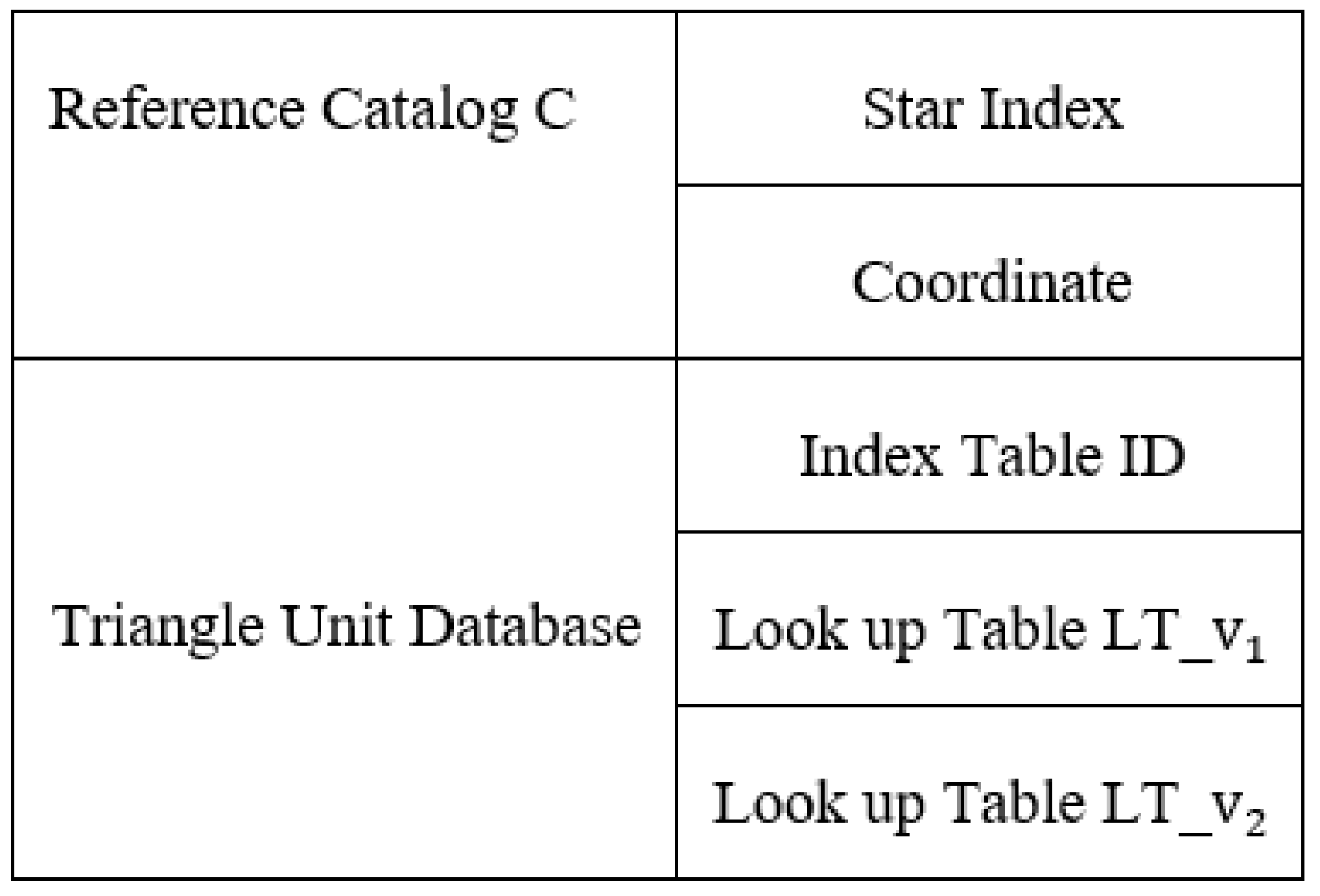
2.2. Onboard Database Generation
2.3. Multilayer Voting Algorithm
2.3.1. Initial Match
2.3.2. Verification
2.4. Pseudocode Description
- (1)
- N is the maximum number of selected stars in an image to construct triangle units. Larger N means more true triangle units will be involved in the initial matching process, which contributes to identifying star images with false stars and magnitude noise but also require more memory and time consumption. In this paper, we set N = 10, generating 199,562 triangle units;
- (2)
- ver_min is the threshold for the largest cluster group size, which determines the error identification rate of our method. According to the analytic model in [27], ver_min is set to 3, considering the false attitude is unacceptable;
- (3)
- and are the minimum discretized unit for the singular value and , respectively. Obviously, these parameters affect the robustness of the algorithm to position noise. Considering the identification rate and time performance, we choose = 0.00005 and = 0.0005, more details about the parameters selection are described in Section 3.1.
| Algorithm 1 The pseudocode of the proposed algorithm |
| Begin counter = 0*counter for i = 1 to i = N − 2 do for j = i + 1 to j = N − 1 do for k = j + 1 to k = N do [,] = feature_value (i, j, k) [unit_num, K] = search_match_unit (,, LT_, LT_) for p = 1 to p = unit_num do [id1, id2, id3] = unit_starid (K, p) counter[i] = add_counter (i, id1, id2, id3) counter[j] = add_counter (j, id1, id2, id3) counter[k] = add_counter (k, id1, id2, id3) end for end for end for end for for q = 1 to q = N do can[q] = find_candidate (counter[q]) end for recog_flag = verification (can) if recog_flag = 0 return NULL else return id End |
2.5. An Identification Example
3. Implements and Results
3.1. Parameter Selection
3.2. Comparison and Analysis
3.3. Real Star Image Test
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Liebe, C.C. Pattern Recognition of Star Constellations for Spacecraft Applications. IEEE Aerosp. Electron. Syst. Mag. 1992, 7, 10–16. [Google Scholar] [CrossRef] [Green Version]
- Liebe, C.C. Star trackers for attitude determination. IEEE Trans. Aerosp. Electron. Syst. 1995, 10, 10–16. [Google Scholar] [CrossRef] [Green Version]
- Liebe, C.C. Accuracy performance of star trackers-a tutorial. IEEE Trans. Aerosp. Electron. Syst. 2002, 38, 587–599. [Google Scholar] [CrossRef]
- Fan, Q.; Cai, Z.; Wang, G. Plume Noise Suppression Algorithm for Missile-Borne Star Sensor Based on Star Point Shape and Angular Distance between Stars. Sensors 2019, 19, 3838. [Google Scholar] [CrossRef] [Green Version]
- Samaan, M.A.; Mortari, D.; Junkins, J.L. Recursive mode star identification algorithms. IEEE Trans. Aerosp. Electron. Syst. 2005, 41, 1246–1254. [Google Scholar] [CrossRef]
- Rijlaarsdam, D.; Yous, H.; Byrne, J.; Oddenino, D.; Furano, G.; Moloney, D. A Survey of Lost-in-Space Star Identification Algorithms Since 2009. Sensors 2020, 20, 2579. [Google Scholar] [CrossRef]
- Padgett, C.; Kreutz-Delgado, K. A grid algorithm for autonomous star identification. IEEE Trans. Aerosp. Electron. Syst. 1997, 33, 202–213. [Google Scholar] [CrossRef]
- Na, M.; Zheng, D.; Jia, P. Modified grid algorithm for noisy all-sky autonomous star identification. IEEE Trans. Aerosp. Electron. Syst. 2009, 45, 516–522. [Google Scholar] [CrossRef]
- Clouse, D.S.; Padgett, C.W. Small field-of-view star identification using Bayesian decision theory. IEEE Trans. Aerosp. Electron. Syst. 2000, 36, 773–783. [Google Scholar] [CrossRef]
- Lee, H.; Bang, H. Star pattern identification technique by modified grid algorithm. IEEE Trans. Aerosp. Electron. Syst. 2007, 43, 1112–1116. [Google Scholar]
- Aghaei, M.; Moghaddam, H.A. Grid star identification improvement using optimization approaches. IEEE Trans. Aerosp. Electron. Syst. 2016, 52, 2080–2090. [Google Scholar] [CrossRef]
- Silani, E.; Lovera, M. Star identification algorithms: Novel approach & comparison study. IEEE Trans. Aerosp. Electron. Syst. 2006, 42, 1275–1288. [Google Scholar]
- Zhao, Y.; Wei, X.; Li, J.; Wang, G. Star identification algorithm based on K–L transformation and star walk formation. IEEE Sens. J. 2016, 16, 5202–5210. [Google Scholar] [CrossRef]
- Zhang, G.; Wei, X.; Jiang, J. Full-sky autonomous star identification based on radial and cyclic features of star pattern. Image Vis. Comput. 2008, 26, 891–897. [Google Scholar] [CrossRef]
- Wei, X.; Zhang, G.; Jiang, J. Star identification algorithm based on log-polar transform. J. Aerosp. Comput. Inf. Commun. 2009, 6, 483–490. [Google Scholar] [CrossRef]
- Quan, W.; Fang, J. A Star recognition method based on the adaptive ant colony algorithm for star sensors. Sensors 2010, 10, 1955–1966. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, Y.; Zhang, H. Star recognition based on mixed star pattern and multilayer SOM neural network. In Proceedings of the 2017 IEEE Aerospace Conference, Big Sky, MT, USA, 4–11 March 2017. [Google Scholar] [CrossRef]
- Xu, L.; Jiang, J.; Liu, L. A representation learning-based star identification algorithm. IEEE Access. 2019, 7, 92193–92202. [Google Scholar] [CrossRef]
- Liu, L.; Jiang, J.; Zhang, G. Star identification based on spider-web image and hierarchical CNN. IEEE Trans. Aerosp. Electron. Syst. 2019, 56, 3055–3062. [Google Scholar]
- Wei, X.; Wen, D.; Song, Z.; Xi, J.; Zhang, W.; Liu, G.; Li, Z. A star identification algorithm based on radial and dynamic cyclic features of star pattern. Adv. Space Res. 2019, 63, 2245–2259. [Google Scholar] [CrossRef]
- Zhang, G.J.; Wei, X.G.; Jiang, J. Star map identification based on a modified triangle algorithm. Aeronaut. Astronaut. Sin. 2006, 27, 1150–1154. [Google Scholar]
- Sun, L.; Zhou, Y. MVDT-SI: A Multi-View Double-Triangle Algorithm for Star Identification. Sensors 2020, 20, 3027. [Google Scholar] [CrossRef]
- Mortari, D.; Samaan, M.A.; Bruccoleri, C.; Junkins, J.L. The pyramid star identification technique. Navigation 2004, 51, 171–183. [Google Scholar] [CrossRef]
- Kolomenkin, M.; Pollak, S.; Shimshoni, I.; Lindenbaum, M. Geometric voting algorithm for star trackers. IEEE Trans. Aerosp. Electron. Syst. 2008, 44, 441–456. [Google Scholar] [CrossRef]
- Juang, J.N.; Kim, H.Y.; Junkins, J.L. An Efficient and Robust Singular Value Method for Star Pattern Recognition and Attitude Determination. Adv. Astronaut. Sci. 2003, 115, 211–220. [Google Scholar]
- Saff, E.B.; Kuijlaars, A.B. Distributing many points on a sphere. Math. Intell. 1997, 19, 5–11. [Google Scholar] [CrossRef]
- Kumar, M.; Mortari, D.; Junkins, J.L. An analytical approach to star identification reliability. Acta Astronaut. 2013, 66, 508–515. [Google Scholar] [CrossRef]
- Mehta, D.S.; Chen, S.; Liang, R.; Low, K.S. A rotation-invariant additive vector sequence based star pattern recognition. IEEE Trans. Aerosp. Electron. Syst. 2018, 55, 1–16. [Google Scholar] [CrossRef]
- Yin, H.; Song, X.; Yan, Y. Robustness analysis and improvement of singular value decomposition algorithm for autonomous star identification. Proc. Inst. Mech. Eng. G J. Aerosp. Eng. 2015, 229, 1757–1770. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Description |
|---|---|
| N | The maximum number of selected stars in a FOV to form the triangle units |
| The minimum discretized unit in the singular value feature values | |
| The minimum discretized unit in the singular value feature values | |
| ver_min | The threshold of the largest cluster group size |
| feature_value (i, j, k) | Calculates the feature values of the triangle unit formed by stars (i, j, k) in the image and returns the feature values . |
| search_match_unit ) | According to feature values searches the lookup tables , and finds match units in the catalog, returns the set K, including all match units, and the element number unit_num in K. |
| unit_starid (K, p) | Determines the three catalog stars indexes in C of the p-th match unit in the K and returns the indexes id1, id2, and id3. |
| add_counter (t, id1, id2, id3) | The t-th sensor star’s counter of catalog stars that corresponds with id1, id2, and id3 add one and returns the counter of the t-th sensor star. |
| find_candidate (counter[q]) | Determines the candidate of the q-th sensor star with the related counters counter[q] and returns the index of the candidate can[q]. |
| verification (can) | Determines the largest cluster group of the candidates and returns the final identification results. |
| Image Star | Catalog Star | Initial Match | Verification |
|---|---|---|---|
| 1 | 147,986 | 147,986 | 147,986 |
| 2 | 129,825 | 129,825 | 129,825 |
| 3 | - | 8102 | - |
| 4 | 147,632 | 147,632 | 147,632 |
| 5 | 110,065 | 110,065 | 110,065 |
| 6 | - | 163,422 | - |
| 7 | 110,291 | 110,291 | 110,291 |
| 8 | 148,059 | 148,059 | 148,059 |
| 9 | - | 258,698 | - |
| 10 | 109,793 | 13,351 | - |
| Algorithm | Our Method | Optimized Grid | SVD | Geometric Voting |
|---|---|---|---|---|
| Run time | 35.3 ms | 130.7 ms | 16.2 ms | 76.6 ms |
| Memory cost | 2.1 MB | 0.5 MB | 0.15 MB | 0.6 MB |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, M.; Wei, X.; Wen, D.; Wang, H. Star Identification Based on Multilayer Voting Algorithm for Star Sensors. Sensors 2021, 21, 3084. https://doi.org/10.3390/s21093084
Liu M, Wei X, Wen D, Wang H. Star Identification Based on Multilayer Voting Algorithm for Star Sensors. Sensors. 2021; 21(9):3084. https://doi.org/10.3390/s21093084
Chicago/Turabian StyleLiu, Meiying, Xin Wei, Desheng Wen, and Hu Wang. 2021. "Star Identification Based on Multilayer Voting Algorithm for Star Sensors" Sensors 21, no. 9: 3084. https://doi.org/10.3390/s21093084
APA StyleLiu, M., Wei, X., Wen, D., & Wang, H. (2021). Star Identification Based on Multilayer Voting Algorithm for Star Sensors. Sensors, 21(9), 3084. https://doi.org/10.3390/s21093084