1. Introduction
One of the most important advantages of the use of LMIs in the design of robust controllers and state observers is their capability to account for bounded parameter uncertainty by means of suitable (often polytopic) uncertainty models. In such a way, it becomes possible to include a guaranteed stability proof of the uncertain linear dynamic system directly in the design stage. Moreover, polytopic uncertainty models can also be employed to over-bound the influence of nonlinear state dependencies in the system and output equations if they can be reformulated in terms of a quasi-linear representation. In addition to the task of system stabilization, further optimizations of the closed-loop dynamics become possible, which include a reduction of sensitivity against external disturbances (commonly in an
sense) or the specification of admissible eigenvalue domains (so-called regions of
-stability, which serve among others as a representation for minimum damping ratios or bandwidth limitations). For general references about the theory and possible applications of LMIs in the frame of control and observer synthesis, the reader is referred to the works of [
1,
2,
3,
4,
5,
6,
7,
8]. In addition, approaches for the assignment of admissible eigenvalue domains, partially with applications to the control and oscillation attenuation of mechanical systems with elastic spring elements, were considered recently in [
9,
10], where a continuous-time setting was taken into account. For the discrete-time counterpart, cf. [
11,
12]. In addition to continuous-time systems with an integer-order time derivative, LMI techniques have recently also become an active topic of research if robust controllers and observers are to be designed for fractional-order systems with uncertainty [
13,
14,
15,
16].
As far as output feedback control procedures (instead of full state feedback controllers) are investigated in this framework, especially the work of Chesi [
17] should be mentioned. However, in contrast to our paper, it did not deal with a simultaneous consideration of bounded parameter uncertainty, on the one hand, and stochastic input, system, and measurement noise, on the other hand.
Besides the design of controllers with constant, state-independent gains, LMI design procedures were also developed in recent years to allow for robust gain adaptation schemes. Moreover, an example, where methods form the field of interval analysis [
18,
19] were employed for an underlying reachability analysis, was published in [
20]. Note that one of the attractive properties of LMIs is the existence of powerful software libraries that can be employed for a large variety of design tasks. In the current paper, the numerical implementation of the suggested LMI-based solution procedure makes use of
Yalmip [
21] as the user interface to
MATLAB, while
SeDuMi [
22] is employed as the underlying solver.
In addition to the aforementioned bounded uncertainties, most practical systems are also influenced by stochastic actuator, process, and sensor noise. Assuming linear dynamics, the combination of a linear quadratic regulator design with an optimal state estimation by means of Kalman filters (for additive Gaussian noise processes) can be seen as the best solution if a feedback of all state variables is desired. However, classical formulations for the solution of this design task assume perfectly known system, input, and output matrices [
23,
24,
25]. This aspect directly motivates the goal to employ robust LMI-based design approaches (which are naturally suited for bounded uncertainty) also in a stochastic setting. An example, where such a kind of approach was developed, was published recently by [
6]. There, the problem of control parameterizations was solved such that the output and input covariances (i.e., uncertainty on the closed-loop controlled states and actuator signals) fell below specific threshold values.
A similar idea was used in [
26], where LMI formulations were employed, on the one hand, to characterize the size of the domain around the system’s equilibrium for which no stability properties in the sense of a guaranteed convergence of trajectories can be made. This analysis interfaces LMIs with the Itô differential operator [
27,
28], which provides the possibility to define time derivatives of Lyapunov function candidates despite stochastic noise. On the other hand, the work of [
26] also introduced an LMI-based numerical optimization of the gains of a full-scale state observer so that the non-provable stability domains were minimized. However, in contrast with the current paper, the approach in [
26] did not consider bounded parameter uncertainty during the minimization of the domain for which stability cannot be proven. In addition, the work [
26] also assumed a predefined control parameterization. Both restrictions are removed in the current paper, so that the joint optimization of output feedback controllers and linear filters can be carried out. These linear filters are, on the one hand, employed to reduce the influence of measurement noise and, on the other hand, to estimate a certain number of time derivatives of selected system outputs in a model-free way. The filtered outputs are required for the implementation of a stabilizing output feedback controller, which is optimized by an iterative LMI approach to become as insensitive as possible against parameter uncertainty and stochastic noise.
In
Section 2 of this paper, the problem formulation is given. In addition, the results from [
26] are briefly summarized and extended towards a combined optimization of the gains of output feedback controllers and underlying linear filters. Simulation results for a prototypical benchmark application from the area of oscillation attenuation for spring-mass-damper systems are presented in
Section 3 before conclusions and an outlook for future work are given in
Section 4.
2. LMI-Based Control and Filter Optimization
In this paper, dynamic system models are considered, which are given by the stochastic differential equations
with the state vector
and the input vector
;
and
are the system and input matrices, where
is a vector of either constant or time-varying bounded parameters. Alternatively, this vector represents the dependencies of all system matrices on the state variables
; cf. [
20]. For the sake of compactness, we assume that all entries of
are mutually independent and that they influence the matrices
and
in an affine manner. Moreover,
and
are stochastically independent standard normally distributed Brownian motions of the actuator and process noise, so that
and
define the respective noise standard deviations in terms of element-wise non-negative matrix entries.
In addition, the measured system output is given by
where the output matrix
is assumed to be exactly known;
is the standard normally distributed measurement noise, while
is the corresponding weighting matrix denoting the actual standard deviation of the output disturbance.
For the sake of completeness, we summarize three different control scenarios in the following, where Cases 1 and 2 are based on the implementation of state observers, while Case 3 is the linear filter-based output feedback control investigated in this paper. Note that the Cases 1 and 2 were studied in [
29].
- Case 1:
The control signal is defined as
where
is a feedforward signal and
is the state estimate determined by the robust observer
that makes use of the nominal system and input matrices
and
; see [
30].
- Case 2:
The control signal is defined as
with the same observer as in (
4).
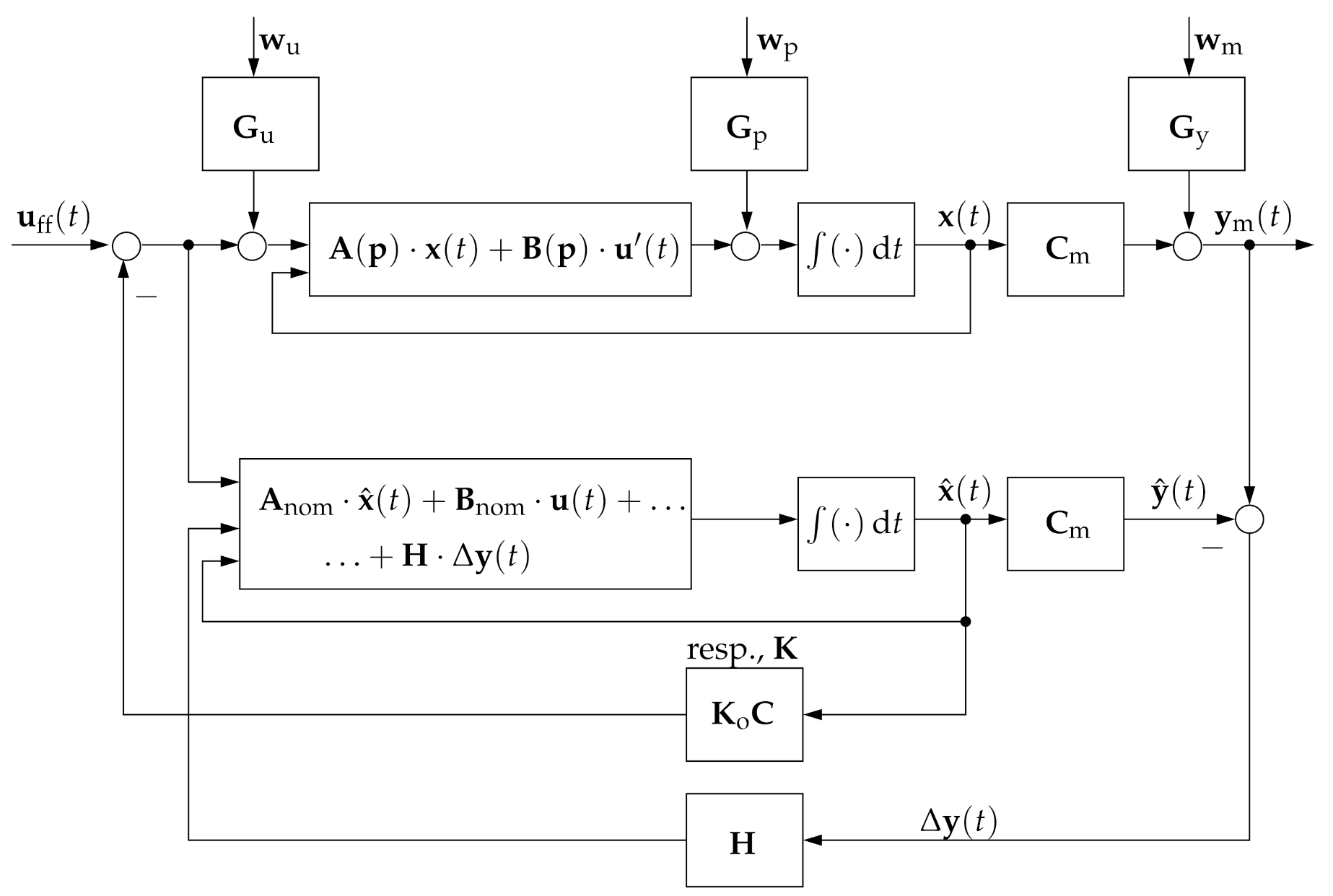
- Case 3:
The control signal is given by
where
is a vector consisting of filtered system outputs and estimated output derivatives, where the filter input corresponds to the measured system outputs
according to (
2). Here, the negative sign in front to the controller gain matrix
is introduced to make the equations structurally equivalent to the classical full-state feedback control synthesis in [
29]. Moreover, without loss of generality, we assume
, which corresponds to the origin of the state space as the desired operating point.
For what follows, we assume further that the filtered system outputs are related to selected components of an estimated state vector
by the algebraic relation
The introduction of this constraint allows us to formulate stability requirements for an output feedback control—that is based on an ideal filtering—(i.e., the algebraic relation (
7) holds) in terms of matrix inequalities, which can be cast into LMIs by a suitable change of coordinates; see
Section 2.2. Errors, which inevitably result from the non-negligible filter dynamics, are later on taken into consideration in
Section 2.3 and
Section 2.4, especially in Equations (
28) and (
29).
If the matrix
(which extracts certain state variables or their linear combinations from the linear filter’s state vectors) has full row rank, (
7) can be reformulated according to
where
is the matrix pseudo inverse. Under the assumption of the aforementioned stationary, i.e., purely algebraic, relation, the matrix
provides the possibility to express the filter outputs
in terms of the internal states of the plant (
1).
For further details concerning the structured, LMI-based output feedback control design in Case 2, the reader is also referred to [
31].
Figure 1 and
Figure 2 give a summary of the three different types of control structures described above, where the last one is the focus of this paper.
To guarantee the solvability of the control design task, it is assumed that the system (
1) is stabilizable using either of the inputs (
3), (
5), or (
6). In addition, the pair
needs to be robustly observable (or at least detectable) in Cases 1 and 2; cf. [
29].
2.1. Polytopic Uncertainty Modeling
As shown in [
4,
32], it is possible to describe the influence of uncertainty in many practical applications by bounded domains
of the polytope type. For that purpose, it is necessary that all system matrices in (
1) belong to a convex combination of extremal vertex matrices in the form
where
denotes the number of independent extremal realizations for the union of all four matrices included in (
10).
2.2. Robust Output Feedback Control for Case 3
LMI-based design approaches can be employed for the design of output feedback controllers that are restricted in their parameterization according to Case 3. Here, the system’s measured outputs and selected time derivatives of these signals are fed back after a suitable low-pass filtering, parameterized according to the following subsections.
In the case of an ideal (error-free) filtering, the closed-loop dynamics are guaranteed to be robustly stable if the controller gains satisfy the following theorem representing a bilinear matrix inequality.
Theorem 1. (Sufficient stability condition for robust output feedback control) Robust asymptotic stability of the closed-loop control system according to Case 3 is ensured for an error-free output feedback (i.e., ) if the gain matrix satisfies the bilinear matrix inequalities,
for all vertices in (10).
Proof. The proof of Theorem 1 is a direct consequence of setting up sufficient stability conditions for each vertex system of a linear model with polytopic uncertainty representation. In this way, Equation (
11) represents the Lyapunov inequalities to be satisfied for each vertex system according to [
8,
33]. □
Note, the matrix inequality (
11) is bilinear due to multiplicative couplings between the yet unknown matrices
and
. The following corollary provides a possibility to transfer these stability requirements into computationally feasible LMIs including a linear equality constraint.
Corollary 1. An LMI formulation of Theorem 1 is obtained by introducing a linearizing change of variables with the positive definite, symmetric unknown matrix , as well as the equality constraintsfor which was assumed to be precisely known, i.e., a point matrix, according to its definition in Equations (6) and (7). Substituting the relations (12) into (11) and multiplying the matrix inequality form the left and right by yield the LMIsto be jointly satisfied for each vertex system . If the matrix has full row rank, the algebraic constraint in (12) ensures that has full rank and that it is therefore invertible. Then, the resulting controller gain is given by [33]: 2.3. Linear Output Filtering
As shown in [
26], a linear low-pass output filtering, as well as the derivative estimation of the scalar measured variables
,
, can be described in terms of the input-output representation
The linear differential Equation (
15) has the order
and contains the
k-th order time derivatives
that represent the filtered quantities that can be utilized in the controller according to Case 3, Equation (
6). In this subsection, we present an LMI-based design of these filters as a systematic generalization of the pole (respectively, time constant) assignment that was performed in [
26].
When additionally accounting for the influence of stochastic noise with quasi-continuous measurements, Equation (
15) turns into the state-space representation
of a stochastic differential equation with the state vector
in which the superscript index denotes the corresponding temporal derivative order, the coefficient matrices
the first unit vector
, and the yet unknown filter gain vector
with
. This simplification results from a normalization of both sides of (
15) under the restriction of steady-state accuracy due to which the derivatives of order zero on both sides of (
15) have identical coefficients. For the sake of compactness, it is assumed that the matrix
in (
2) is purely diagonal. This corresponds to vanishing correlations between the noise of all scalar measurements in (
2) with
.
Hence, the low-pass filtered derivative of the order
j,
, for the
i-th measured output is related to the state vector
of the stochastic differential equation model (
16) by
with
denoting the
j-th unit vector. In the equations above, the subscript
denotes the measured data, the prime symbol
the ideal noise-free outputs, the subscript
the filtered data, and
the estimates used by the controller.
A compact notation of the filtered output vector
in Equation (
6) is obtained by collecting all outputs from (
20) that are actually relevant for the output feedback design according to
Here,
represents the dependence of the filter outputs
on the filters’ state variables
and contains the coefficients of the first summand of both rows in (
20). The factor
is only non-zero if the filter has a direct measurement feedthrough (and, thus, also a noise feedthrough) because the approximate of the derivative of the order
is expressed in terms of the last vector component of the dynamic model (
16).
The asymptotic stability of the filter dynamics with purely real eigenvalues is ensured by the following theorem.
Theorem 2. (Asymptotically stable, non-oscillatory filter dynamics) The filter dynamics (20) are guaranteed to be asymptotically stable with purely real eigenvalues of the deterministic part of the stochastic differential Equation (16), if the gain vectors satisfy the matrix inequalitieswith some for all , wherewith ; ⊗ is the matrix Kronecker product of the respective arguments; and represent bounds on the real parts of the eigenvalues so that holds. To obtain purely real eigenvalues, is chosen. A graphical representation of the stability domain represented by (
23) with (
24) is given in
Figure 3.
Proof. Theorem 2 is a direct consequence of formulating a bounded interval
on the negative real axis of the complex
s plane (with
being the conjugate complex of
s) as the desired
-stability domain
according to [
3,
5,
7]. For a detailed derivation of the coefficient matrices
and
, see
Appendix A. A reformulation of this
-stability domain into a gain-dependent matrix inequality according to ([
20], Equation (11)) completes the proof. □
Remark 1. The specification of Γ
-stability domains is analogously possible for the output feedback parameterization. For a corresponding generalized formulation, see Appendix B. From a practical point of view, enforcing purely real eigenvalues with in the filter parameterization is often not necessary. Commonly, it is sufficient to specify large enough damping ratios, for example from the sector , where the upper bound of this interval would correspond to the value for Lehr’s damping coefficient in a second-order differential equation. Corollary 2. Following the linearizing change of variablesand multiplying (23) from the left and right with the matrix , , lead to the equivalent LMIs 2.4. Optimal Output Feedback Control
Under the consideration of the structure of the control law of Case 3, the stochastic differential Equation (
1) for the controlled polytopic system model turns into
In addition, the ideal filtering process (assuming a noise-free setting, where the following equation turns exactly into a disturbance-free ordinary differential equation representation in which
represents the state vector after removing the noise term from (
16)) is described by
After introducing the vectors of output estimation errors
and a stacked vector notation
according to (
21), the error dynamics of the linear filters are given by
Now, introduce the stacked vector
consisting of system states and noise-induced filter errors. The stochastic differential equations corresponding to (
32) are given by
with the system matrix
in which its lower right sub-block has the block diagonal structure
and the matrix of standard deviations
with the block diagonal sub-matrix
Theorem 3. (Optimal control and filter gains) The controller and filter gains from Corollary 1 in Section 2.2 and Corollary 2 in Section 2.3 are jointly optimal if they are chosen so that the cost functionis minimized, where the abbreviation is defined and is a free matrix variable. Here, the matrices are defined for the vertices of the polytope (10) according towith In addition, the definiteness constraintwithandmust be satisfied; symbols indicate an iterative evaluation, where all such values are replaced by the outcome of the previous iteration stage. Proof. Define a positive definite Lyapunov function candidate
with the block diagonal matrix
By applying the Itô differential operator [
27], its time derivative is obtained as
Following the reasoning in [
26], the interior of the ellipsoid
where
and
hold, is the domain for which no stability properties can be verified. Its volume is proportional to
Generalizing the statements from [
26], the minimization of the ellipsoid volume—with a simultaneous maximization of the error domain for which the linear feedback signals are bounded by some positive constant according to [
34] after introducing the denominator terms depending on
and
—leads to the cost
to be minimized for each vertex
v. Nonlinearities in the argument
of the
in (
51) are removed by a relaxation into the matrix inequality
with
, which finally leads to
by applying the Schur complement formula. Summing up the expressions (
51) for all
, as well as replacing the denominator terms depending on the gain values in (
34) by their result from the previous iteration step and doing the same with the gains in (
53) complete the proof. □
Figure 4 provides a structure diagram of the complete iteration process for the parameterization of the filter-based control law of Case 3. There, the precision parameters
and
need to be chosen so that they are much smaller than the norms of the gains
and
resulting from the initialization phase that is carried out prior to the while-loop, for example
and
.
Remark 2. For the examples considered in the following section, the while-loop typically terminated after no more than 30 iterations, where each iteration step took less than a second on a standard notebook computer.
3. Simulation Results
To demonstrate the suggested solution procedure, the oscillation attenuation of a spring-mass-damper system with the position variable
, the velocity
, and the actuating force
is considered. It is described by the state equations
with the nominal system parameters
,
,
,
,
, and
.
Stochastic input disturbances
are neglected in this example. The third state equation in (
54) describes the input force
that is generated from the control signal
u by a first-order lag element with the time constant
.
Noisy measurements of the position are available according to
with the standard deviation
.
3.1. Control Design for the Nominal System Model with Precisely Known Parameters
To perform the oscillation attenuation, a differentiating control law is implemented in terms of a feedback of an approximation of the velocity by means of with a suitably chosen, stabilizing gain value .
Setting
for the range of admissible eigenvalues in Theorem 2, the gain
with
is obtained with
if the algorithm summarized in
Figure 4 is applied. Corresponding simulation results for the controlled position
and the system input
u are shown in
Figure 5a,b. These graphs further contain a comparison with the simulation results for the control and filter optimization when the polytopic system model described in the following subsection is considered.
3.2. Control Design for a Polytopic System Model
If it is assumed in a robust control design that
and
can vary independently in the intervals
and
, while all remaining parameters are set equal to the previous point values, the control and filter gains obtained from the the algorithm in
Figure 4 change to
with
Also in this case (
Figure 5a,b), an efficient oscillation attenuation is obtained, where the simulation was carried out for the nominal system parameters. In addition,
Figure 6 provides a comparison of the true and estimated states
and
for the model-free filter technique that was optimized by means of the proposed LMI-based procedure. On the one hand, it can be seen that the resulting parameterization is capable of effectively suppressing the stochastic measurement noise. However, in contrast to the observer discussed in the following subsection, the price to pay for this noise suppression is a non-negligible delay in the reconstruction of both
and
.
3.3. Comparison with a Heuristic D-Type Control Parameterization
For the sake of comparison,
Figure 7 and
Figure 8 contain the results of the heuristically tuned control approach from [
26], where a root locus analysis of the plant was employed to set the controller gain to
to obtain purely negative real eigenvalues. If the low-pass filtered velocity estimate is determined by a second-order transfer function with the time constants
and
, excessively large control inputs can be observed, which are more or less useless in practice due to extreme actuator wear and energy consumption.
Although this was not discussed explicitly in this paper, it is easily possible to extend the newly derived design LMIs of the output feedback according to Corollary 1 by further requirements. Especially,
-stability domains can be introduced not only to enforce real filter eigenvalues, but also to guarantee desired transition times and bandwidth limitations of the controller itself. The required steps are summarized in
Appendix B.
For a second comparison with [
26],
Figure 7 and
Figure 8 also contain a further velocity estimation approach. There, the same (heuristically chosen) gain
was used for the controller parameterization; however, an LMI-based observer tuning was performed on the basis of a nominal system model. The corresponding results are well comparable with the more simple filter-based output feedback from this paper with respect to noise suppression and transient behavior of the controlled system. Obviously, however, the use of a full-scale state observer leads to a suppression of undershooting the desired target position
due to the fact that the velocity estimates are less affected by the lag behavior that occurs inevitably in the case of a model-free linear filter approach for derivative estimation. This becomes obvious if the
Figure 6c,d are compared with
Figure 8b. However, the heuristically parameterized second-order filter-based velocity estimate in
Figure 8d is by far worse than the optimized filter in the
Figure 6c,d and the model-based observer in
Figure 8b.
Therefore, it should be pointed out that using the joint optimization of filter-based derivative estimators and output feedback controller gains is especially promising in practice if either a purely proportional feedback is implemented or if the use of no more than two time derivatives of the measured signals is required. In other scenarios, the Cases 1 and 2 sketched in this paper (cf. [
29] for further details) are superior in transient operating conditions due to the capability of a full-scale state observer to reduce not only the effect of stochastic noise, but also to avoid large undesired lag phenomena.
4. Conclusions and Outlook on Future Work
In this paper, a novel approach for the combined optimization of output feedback controller gains and linear filter transfer functions was proposed for linear continuous-time dynamic systems. This approach took into account stochastic disturbances in both the system dynamics and measurement model and aimed at finding parameterizations with which the domains around the system’s equilibrium, for which stability cannot be proven in a stochastic sense, are minimized. Due to the use of an LMI-based formulation of the optimization task, it is easily applicable to systems with bounded parameter uncertainty.
Future work will aim at validating the proposed design methodology experimentally and at interfacing it with LMI-based design approaches for interval observers [
35] as a technique for the state estimation in a bounded-error framework. In addition, also combinations with sliding mode-type control procedures such as those in [
36] can be investigated. Finally, it should be pointed out that the technique is readily applicable also to higher dimensional system models, such as the interconnection of multiple spring-mass-damper elements in the frame of mechanical vibration control or the interconnection of RLC networks, which may serve either as a representation of long electric transmission lines or as a finite-dimensional approximation of volume flow and pressure variations in fluidic networks [
10,
37,
38]. In all of these applications, efficient output feedback control procedures are promising for the reduction of undesirable oscillations. However, future work should not only apply the proposed methodology to systems where the measured quantities are already predefined. Instead, novel optimization procedures for the most effective sensor placement should be developed and combined with the approach presented in this paper.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}