
Unmanned Aerial Vehicle Propagation Channel over Vegetation and Lake Areas: First- and Second-Order Statistical Analysis

 , , ,
, , ,  and
and
Abstract
:1. Introduction
2. Materials
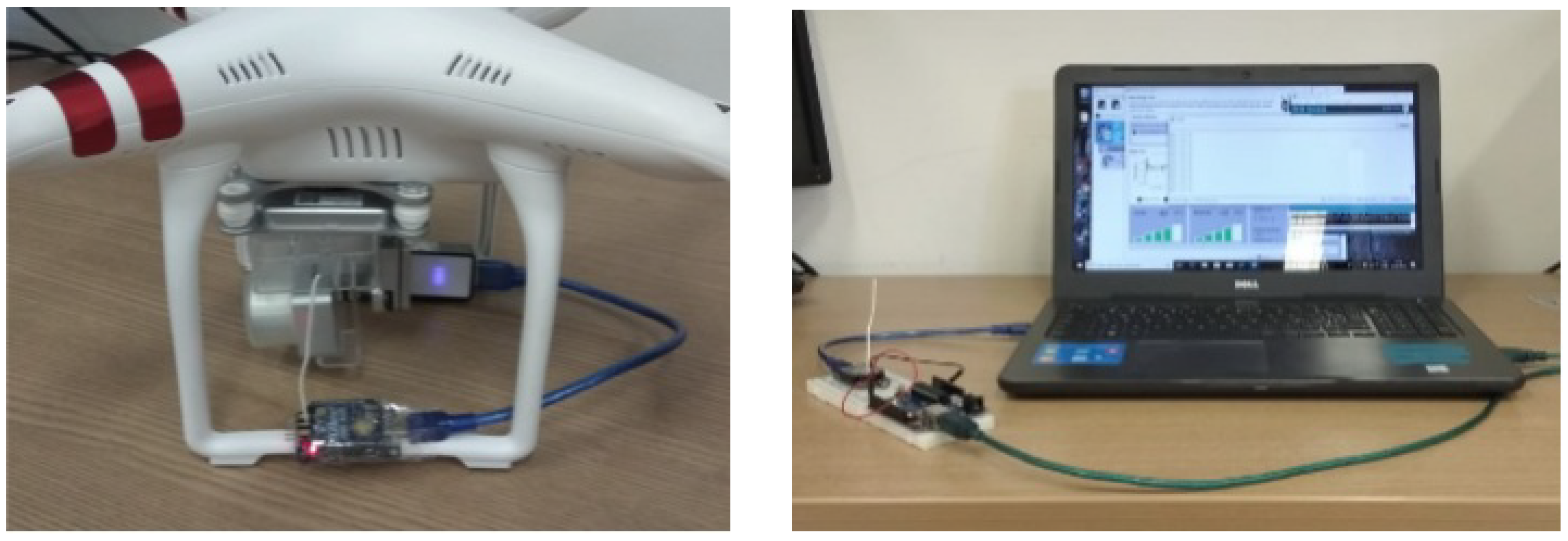
2.1. Unmanned Aerial Vehicle
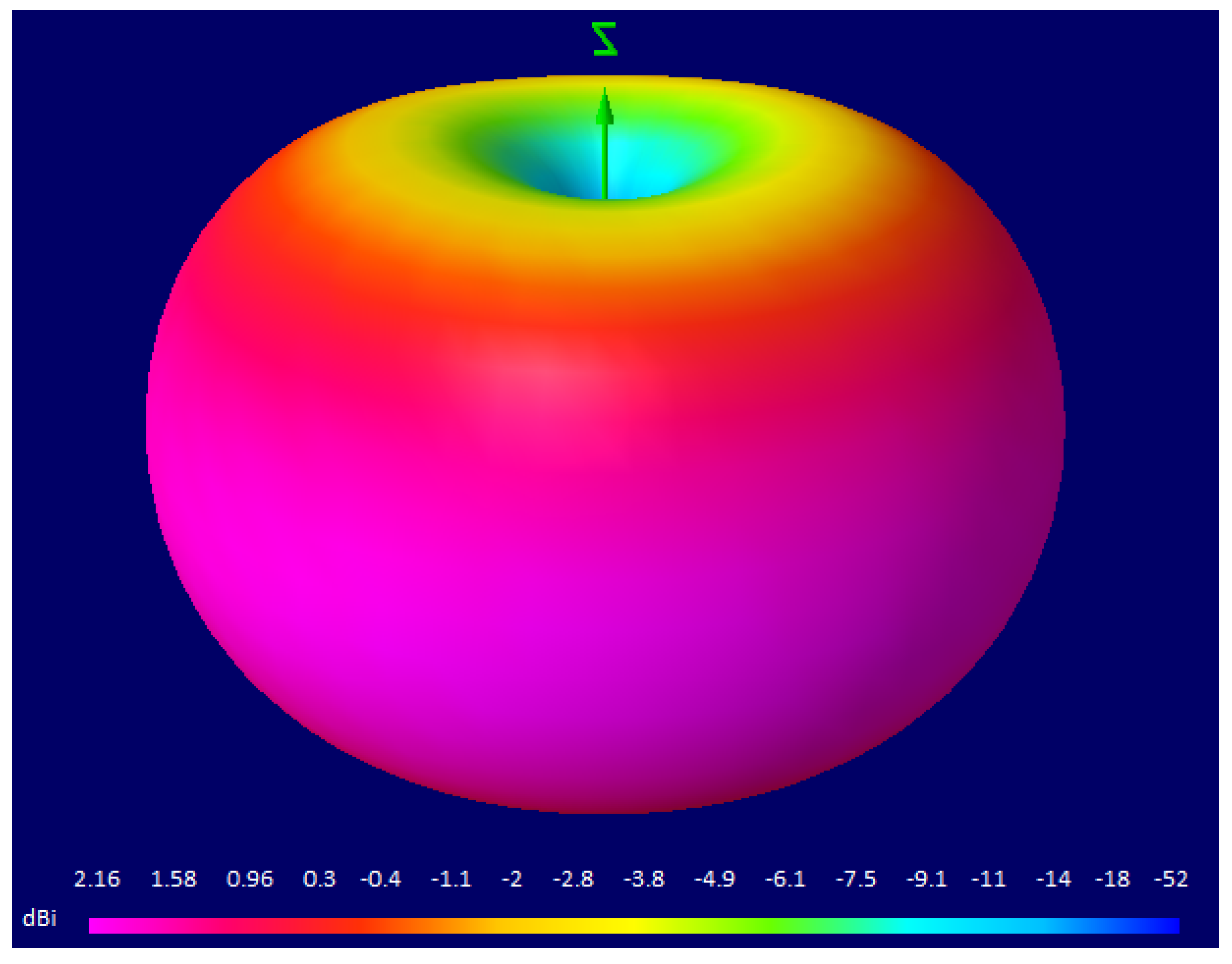
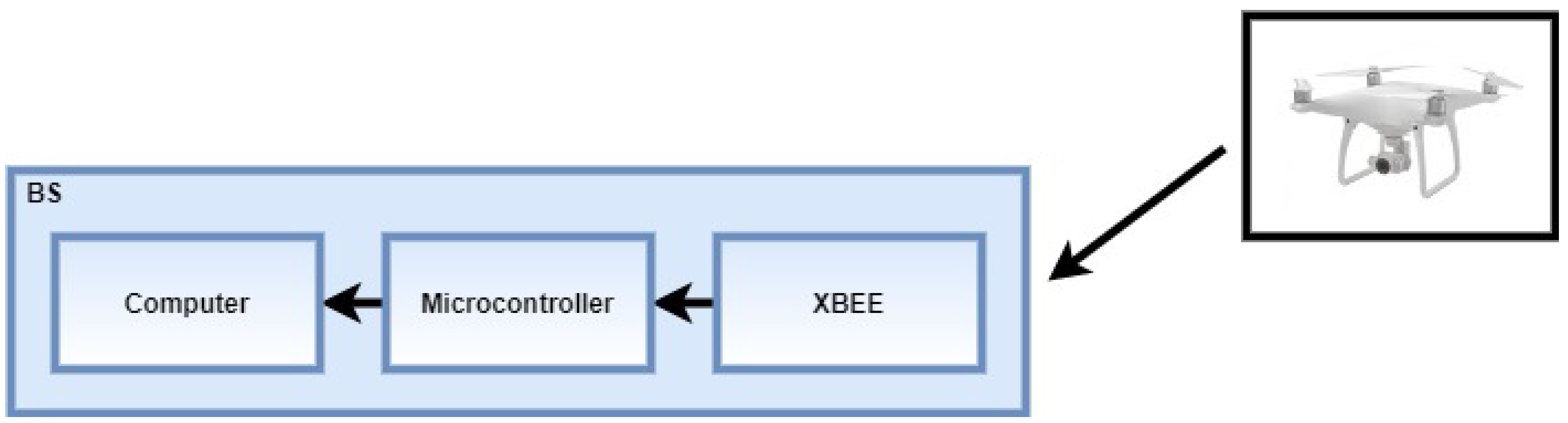
2.2. XBee Module
3. Mathematical Formulation and Methodology
3.1. Filtering
3.2. Large-Scale Attenuation
3.3. Small-Scale Fading
3.3.1. Level Crossing Rate
3.3.2. Doppler Frequency
4. Measurement Scenario
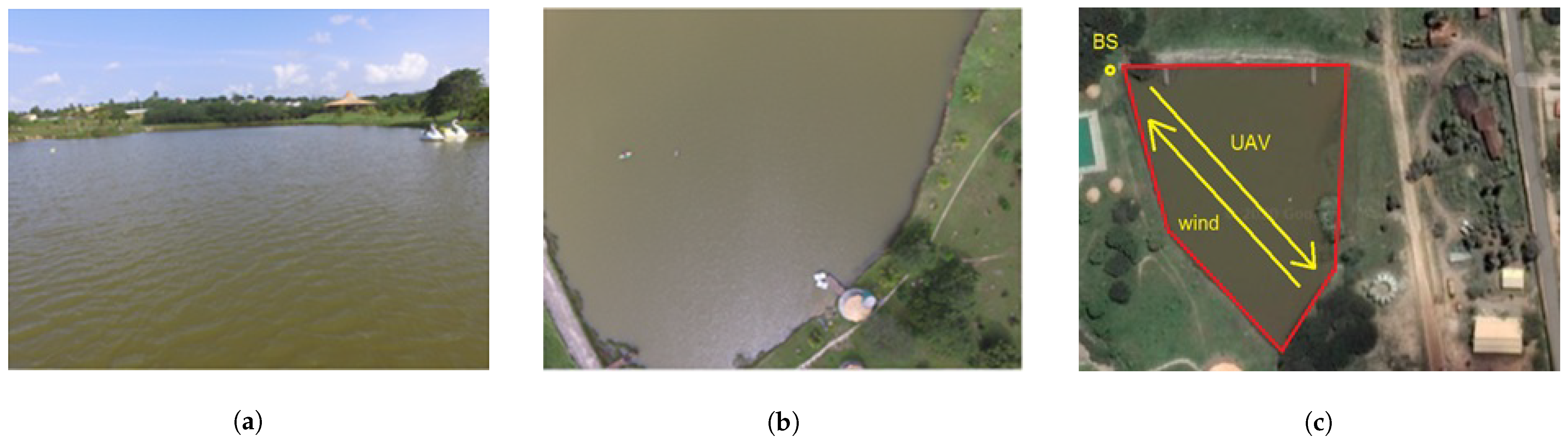
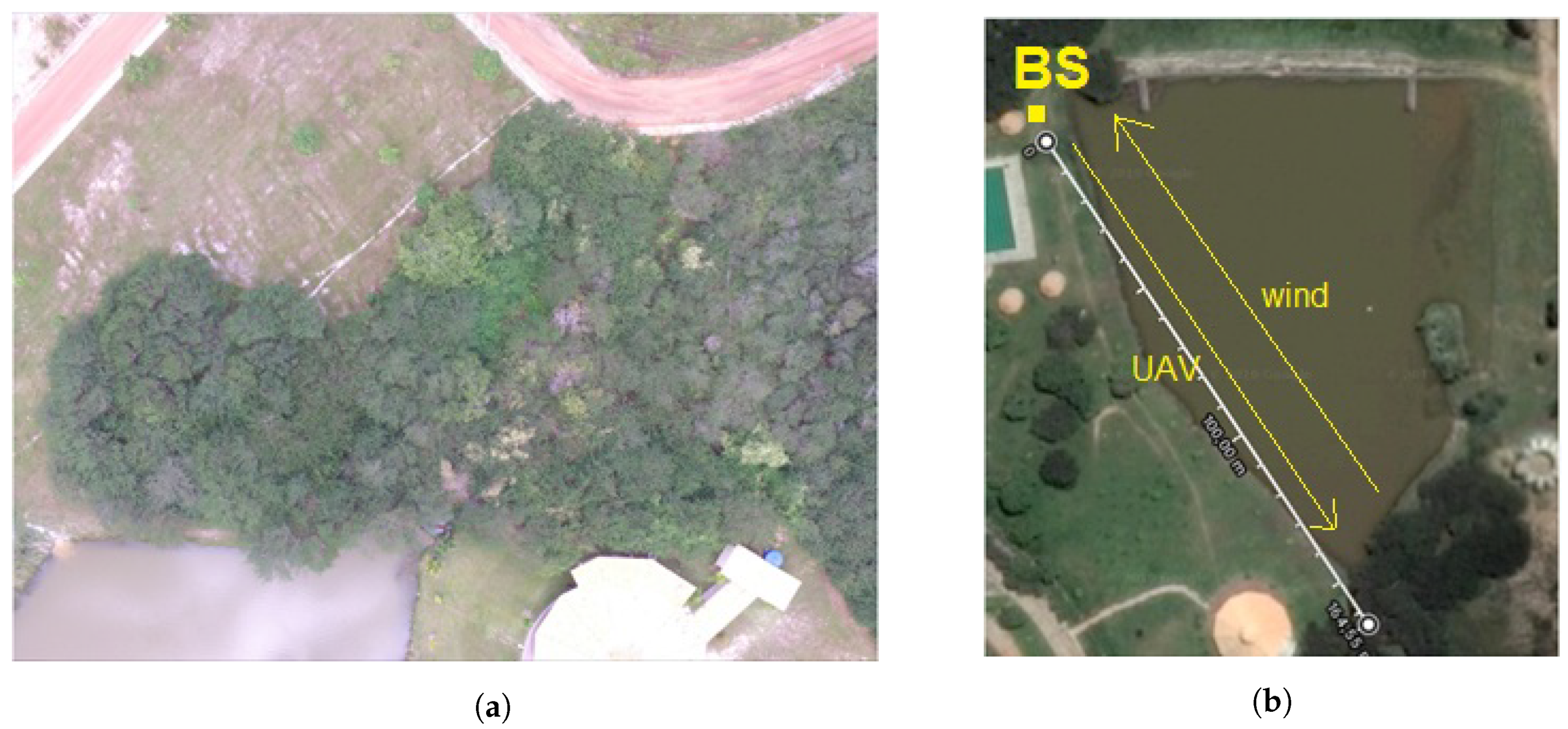
4.1. Measurement Scenario 1: Lake
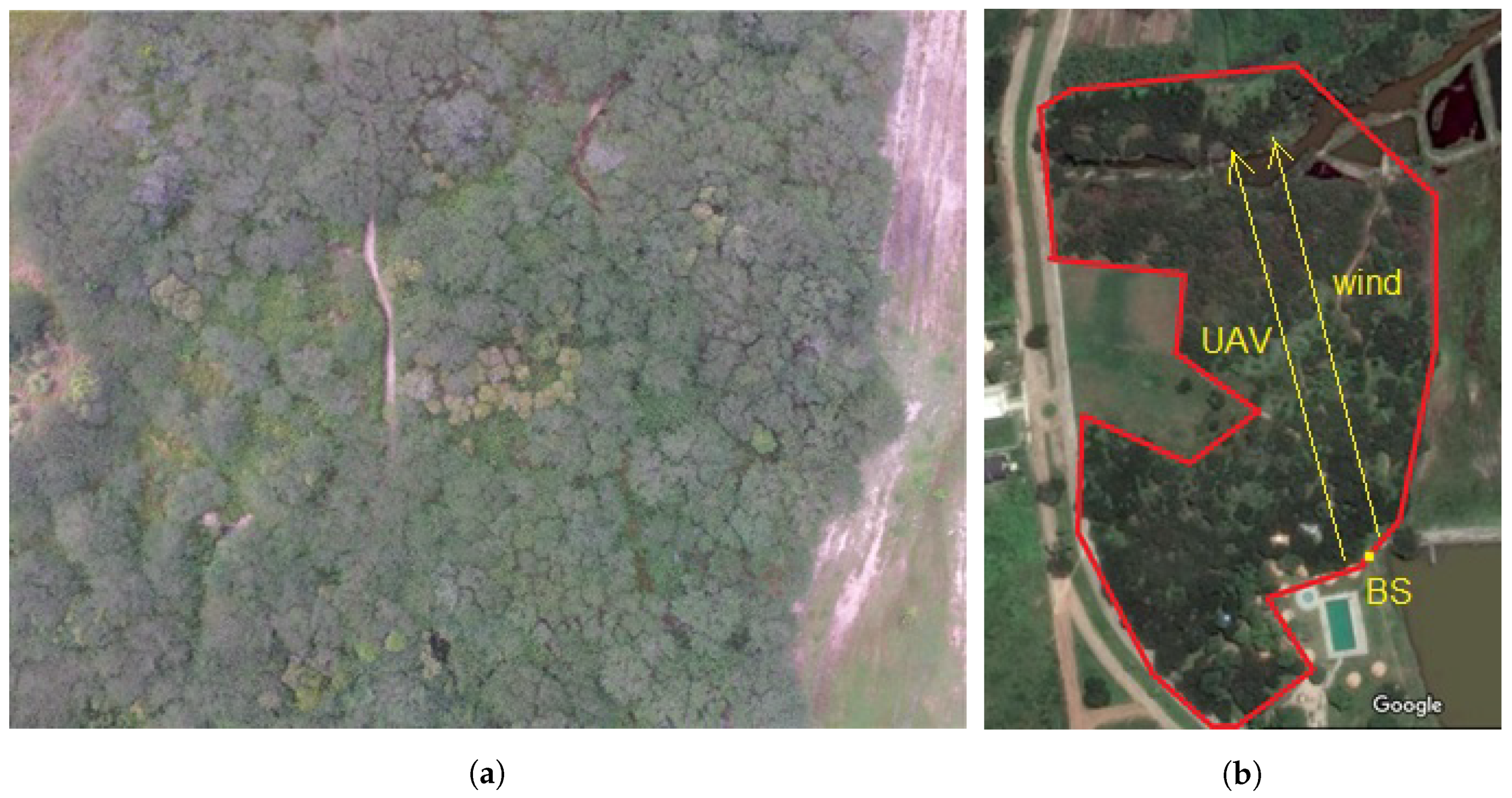
4.2. Measurement Scenario 2: Caatinga
4.3. Measurement Scenario 3: Mixed
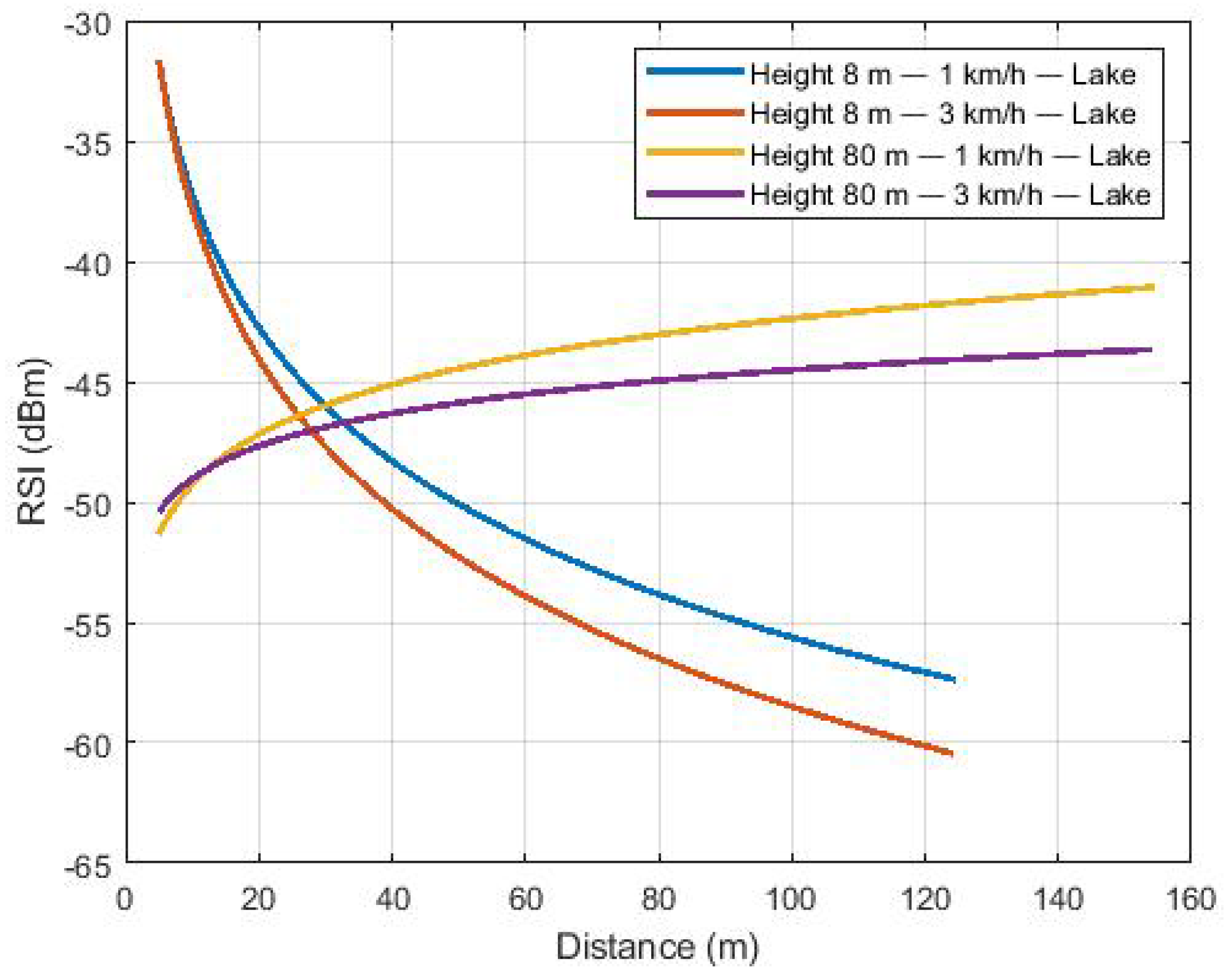
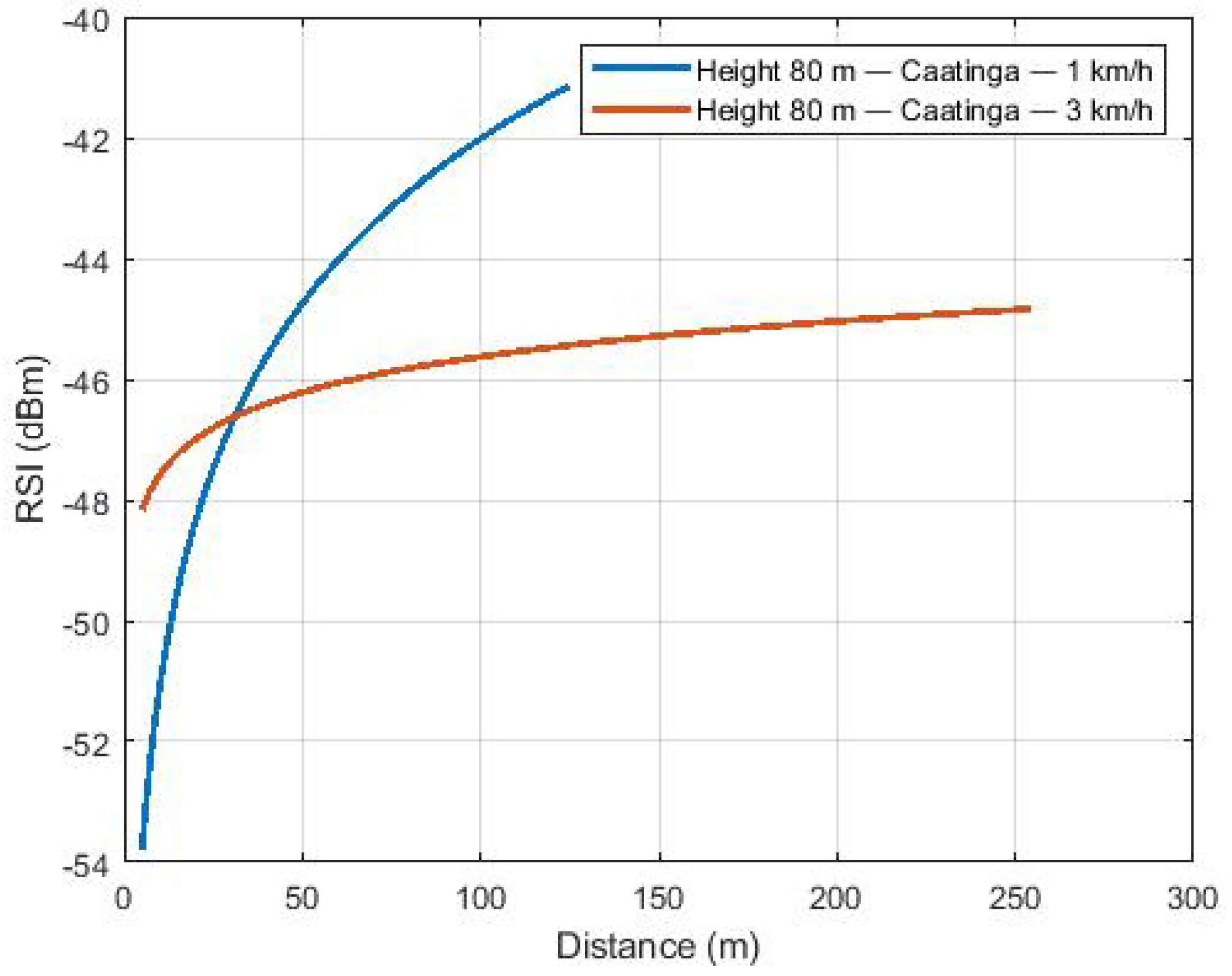
5. Results
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

References
- Khawaja, W.; Guvenc, I.; Matolak, D.W.; Fiebig, U.C. Schneckenburger, N. A survey of air-to-ground propagation channel modeling for unmanned aerial vehicles. IEEE Commun. Surv. Tutor. 2019, 21, 2361–2391. [Google Scholar] [CrossRef] [Green Version]
- Mohammadkarimi, M.; Karami, E.; Dobre, O.A.; Win, M.Z. Doppler spread estimation in MIMO frequency-selective fading channels. IEEE Trans. Wirel. Commun. 2017, 17, 1951–1965. [Google Scholar] [CrossRef]
- Federal Aviation Administration. AGENDA. 2013. Rtca Special Committees 21 May 2020. Available online: https://www.rtca.org/content/sc-228 (accessed on 18 August 2019).
- RTCA (Firm). SC-228. Command and Control (C2) Data Link Minimum Operational Performance Standards (MOPS) (Terrestrial); RTCA: Washington, WA, USA, 2016. [Google Scholar]
- Khuwaja, A.A.; Chen, Y.; Zhao, N.; Alouini, M.S.; Dobbins, P. A survey of channel modeling for UAV communications. IEEE Commun. Surv. Tutor. 2018, 20, 2804–2821. [Google Scholar] [CrossRef] [Green Version]
- Zeng, L.; Cheng, X.; Wang, C.X.; Yin, X. Second order statistics of non-isotropic UAV Ricean fading channels. In Proceedings of the 2017 IEEE 86th Vehicular Technology Conference (VTC-Fall), Toronto, ON, Canada, 24–27 September 2017; pp. 1–5. [Google Scholar]
- Park, G.; Hong, D.; Kang, C. Level crossing rate estimation with Doppler adaptive noise suppression technique in frequency domain. In Proceedings of the 2003 IEEE 58th Vehicular Technology Conference, Orlando, FL, USA, 6–9 October 2003; pp. 1192–1195. [Google Scholar] [CrossRef]
- Yu, H.; Park, G.; Cho, H.; Kang, C.; Hong, D. SNR-independent methods for estimating maximum Doppler frequency. IEEE Signal Process. Lett. 2005, 5, 384–386. [Google Scholar] [CrossRef]
- Santos, J.C.; Leal, I.R.; Almeida-Cortez, J.S.; Fernandes, G.W.; Tabarelli, M. Caatinga: The scientific negligence experienced by a dry tropical forest. Trop. Conserv. Sci. 2011, 4, 276–286. [Google Scholar] [CrossRef]
- Simunek, M.; Fontan, F.P.; Pechac, P.; Otero, F.J.D. Space diversity gain in urban area low elevation links for surveillance applications. IEEE Trans. Antennas Propag. 2013, 61, 6255–6260. [Google Scholar] [CrossRef]
- Simunek, M.; Pechac, P.; Fontán, F.P. Excess Loss Model for Low Elevation Links in Urban Areas for UAVs. J. Radioengineering 2011, 61, 561–568. [Google Scholar]
- Cai, X.; Gonzalez-Plaza, A.; Alonso, D.; Zhang, L.; Rodríguez, C.B.; Yuste, A.P.; Yin, X. Low altitude UAV propagation channel modelling. In Proceedings of the 2017 11th European Conference on Antennas and Propagation (EUCAP), Paris, France, 19–24 March 2017; pp. 1443–1447. [Google Scholar]
- Khawaja, W.; Guvenc, I.; Matolak, D. UWB Channel Sounding and Modeling for UAV Air-to-Ground Propagation Channels. In Proceedings of the 2016 IEEE Global Communications Conference (GLOBECOM), Washington, DC, USA, 4–8 December 2016; pp. 1–7. [Google Scholar]
- Goddemeier, N.; Wietfeld, C. Investigation of Air-to-Air Channel Characteristics and a UAV Specific Extension to the Rice Model. In Proceedings of the 2015 IEEE Globecom Workshops (GC Wkshps), San Diego, CA, USA, 6–10 December 2015; pp. 1–5. [Google Scholar]
- Yanmaz, E.; Kuschnig, R.; Bettstetter, C. Achieving air-ground communications in 802.11 networks with three-dimensional aerial mobility. In Proceedings of the 2013 Proceedings IEEE INFOCOM, Turin, Italy, 14–19 April 2013; pp. 120–124. [Google Scholar]
- Yanmaz, E.; Kuschnig, R.; Bettstetter, C. Channel measurements over 802.11a-based UAV-to-ground links. In Proceedings of the 2011 IEEE GLOBECOM Workshops (GC Wkshps), Houston, TX, USA, 5–9 December 2011; pp. 1280–1284. [Google Scholar]
- Cheng, C.M.; Hsiao, P.H.; Kung, H.T.; Vlah, D. Performance Measurement of 802. 11a Wireless Links from UAV to Ground Nodes with Various Antenna Orientations. In Proceedings of 15th International Conference on Computer Communications and Networks, Arlington, VA, USA, 9–11 October 2006; pp. 303–308. [Google Scholar]
- Hague, D.; Kung, H.T.; Suter, B. Field Experimentation of Cots-Based UAV Networking. In Proceedings of the MILCOM 2006—2006 IEEE Military Communications conference, Washington, DC, USA, 23–25 October 2006; pp. 1–7. [Google Scholar]
- Goddemeier, N.; Daniel, K.; Wietfeld, C. Coverage evaluation of wireless networks for Unmanned Aerial Systems. In Proceedings of the 2010 IEEE Globecom Workshops, Miami, FL, USA, 6–10 December 2010; pp. 1760–1765. [Google Scholar]
- Tavares, T.; Sebastião, P.; Souto, N.; Velez, F.J.; Cercas, F.; Ribeiro, M.; Correia, A. Generalized LUI Propagation Model for UAVs Communications Using Terrestrial Cellular Networks. In Proceedings of the 2015 IEEE 82nd Vehicular Technology Conference (VTC2015-Fall), Boston, MA, USA, 6–9 September 2015; pp. 1–6. [Google Scholar]
- Amorim, R.; Nguyen, H.; Mogensen, P.; Kovács, I.Z.; Wigard, J.; Sørensen, T.B. Radio channel modeling for UAV communication over cellular networks. IEEE Wirel. Commun. Lett. 2017, 6, 514–517. [Google Scholar] [CrossRef] [Green Version]
- Al-Hourani, A.; Gomez, K. Modeling cellular-to-UAV path-loss for suburban environments. IEEE Wirel. Commun. Lett. 2017, 7, 82–85. [Google Scholar] [CrossRef]
- Simunek, M.; Fontan, F.P.; Pechac, P.; Otero, F.J.D. The UAV Low Elevation Propagation Channel in Urban Areas: Statistical Analysis and Time-Series Generator. IEEE Trans. Antennas Propag. 2013, 61, 3850–3858. [Google Scholar] [CrossRef]
- Simunek, M.; Pechac, P.; Fontan, F.P. Feasibility of UAV link space diversity in wooded areas. Int. J. Antennas Propag. 2013, 2013, 890629. [Google Scholar] [CrossRef] [Green Version]
- Gutierrez, R.M.; Yu, H.; Rong, Y.; Bliss, D.W. Time and frequency dispersion characteristics of the UAS wireless channel in residential and mountainous desert terrains. In Proceedings of the 2017 14th IEEE Annual Consumer Communications & Networking Conference (CCNC), Las Vegas, NV, USA, 8–11 January 2017; pp. 516–521. [Google Scholar]
- Kung, H.T.; Lin, C.K.; Lin, T.H.; Tarsa, S.J.; Vlah, D. Measuring diversity on a low-altitude UAV in a ground-to-air wireless 802.11 mesh network. In Proceedings of the 2010 IEEE Globecom Workshops, Miami, FL, USA, 6–10 December 2010; pp. 1799–1804. [Google Scholar]
- Qualcomm, L.T.E. Unmanned Aircraft Systems—Trial Report: San Diego, CA, USA, 2017. Available online: https://www.qualcomm.com/media/documents/files/lte-unmanned-aircraft-systems-trial-report.pdf (accessed on 1 August 2019).
- Afonso, L.; Souto, N.; Sebastiao, P.; Ribeiro, M.; Tavares, T.; Marinheiro, R. Cellular for the skies: Exploiting mobile network infrastructure for low altitude air-to-ground communications. IEEE Aerosp. Electron. Syst. Mag. 2016, 31, 4–11. [Google Scholar] [CrossRef] [Green Version]
- Teng, E.; Falcão, J.D.; Iannucci, B. Holes-in-the-Sky: A field study on cellular-connected UAS. In Proceedings of the 2017 International Conference on Unmanned Aircraft Systems (ICUAS), Miami, FL, USA, 13–16 June 2017; pp. 1165–1174. [Google Scholar]
- Holis, J.; Pechac, P. Elevation dependent shadowing model for mobile communications via high altitude platforms in built-up areas. IEEE Trans. Antennas Propag. 2008, 56, 1078–1084. [Google Scholar] [CrossRef]
- Cai, X.; Rodríguez-Piñeiro, J.; Yin, X.; Wang, N.; Ai, B.; Pedersen, G.F.; Yuste, A.P. An empirical air-to-ground channel model based on passive measurements in LTE. IEEE Trans. Veh. Technol. 2018, 68, 1140–1154. [Google Scholar] [CrossRef] [Green Version]
- Catherwood, P.A.; Black, B.; Cheema, A.A.; Rafferty, J.; Mclaughlin, J.A. Radio channel characterization of mid-band 5G service delivery for ultra-low altitude aerial base stations. IEEE Access 2019, 7, 8283–8299. [Google Scholar] [CrossRef]
- Phantom 3 Standard. Specifications, 2020. Available online: https://www.dji.com/br/phantom-3-standard (accessed on 1 August 2019).
- XBee-PRO. User Guide. User Guide-XBee-PRO 900HP/XSC RF Modules S3 and S3B. In Proceedings of the International Conference on Computational Modeling and Security (CMS 2016), Digi International, Minnetonka, MN, USA, 1 August 2019. [Google Scholar]
- Molisch, A.F.; Balakrishnan, K.; Chong, C.C.; Emami, S.; Fort, A.; Karedal, J.; Siwiak, K. IEEE 802.15. 4a channel model-final report. IEEE P802 2004, 15, 0662. [Google Scholar]
- Lavanya, V.; Rao, G.S.; Bidikar, B. Fast fading mobile channel modeling for wireless communication. In Proceedings of the International Conference on Computational Modeling and Security (CMS 2016), Procedia Computer Science, Bengaluru, India, 11–13 February 2016; pp. 777–781. [Google Scholar]
- Walter, B.; Kurt, H. A Kolmogorov-Smirnov test for r samples. In Procedia Computer Science; Fundamenta Informaticae—IOS Press: Vienna, Italy, 2012; pp. 103–125. [Google Scholar]
- Chrysikos, T.; Georgopoulos, G.; Birkos, K.; Kotsopoulos, S. Wireless Channel Characterization: On the validation issues of indoor RF models at 2.4 GHzs. In Conference: First Panhellenic Conference Electronics and Telecommunications (PACET); Fundamenta Informaticae—IOS Press: Amsterdam, The Netherlands, 2009; pp. 20–22. [Google Scholar]
- Rappaport, T.S. Comunicações Sem Fio: Princípios e Práticas; Pearson Prentice Hall: Hoboken, NJ, USA, 2008. [Google Scholar]
- Sampei, S. Applications of Digital Technologies to Global Wireless Communications; Prentice Hall Prentice Hall PT: Hoboken, NJ, USA, 1997. [Google Scholar]
- Gerome, D. Prediction of urban propagation loss using regression trees. In Proceedings of the 1997 IEEE 47th Vehicular Technology Conference, Phoenix, AZ, USA, 4–7 May 1997; pp. 1099–1102. [Google Scholar]
- Kongsavat, A.; Karupongsiri, C. Path Loss Model for Smart Meter on LoRaWAN Technology with Unidirectional Antenna in an Urban Area of Thailand. In Proceedings of the 2020 IEEE International Conference on Computational Electromagnetics (ICCEM), Singapore, 24–26 August 2020; pp. 260–262. [Google Scholar]
- Myung, I.J. Tutorial on maximum likelihood estimation. J. Math. Psychol. 2003, 47, 90–100. [Google Scholar] [CrossRef]
- Abdi, A.; Wills, K.; Barger, H.A.; Alouini, M.S.; Kaveh, M. Comparison of the level crossing rate and average fade duration of Rayleigh, Rice and Nakagami fading models with mobile channel data. Vehicular Technology Conference Fall 2000. In Proceedings of the IEEE VTS Fall VTC2000, 52nd Vehicular Technology Conference (Cat. No.00CH37152), Boston, MA, USA, 24–28 September 2000; pp. 1850–1857. [Google Scholar]
- Sagias, N.C.; Zogas, D.A.; Karagiannidis, G.K.; Tombras, G.S. Channel capacity and second-order statistics in Weibull fading. IEEE Commun. Lett. 2004, 8, 377–379. [Google Scholar] [CrossRef]
- Zhuang, Y.; Hua, J.; Wen, H.; Meng, L. An iterative Doppler shift estimation in vehicular communication systems. Procedia Eng. 2012, 4129–4134. [Google Scholar] [CrossRef] [Green Version]
- Perotoni, M.B.; Araújo, R.D.P.D.; Sartori, C.A.F. Unmanned Aerial Vehicle Propagation Datalink Tool Based on a Hybrid Multiscale Modeling. J. Aerosp. Technol. Manag. 2018, 10. [Google Scholar] [CrossRef]
- Phaiboon, S.; Somkuarnpanit, S. Mobile path loss characteristics for low base station antenna height in different forest densities. In Proceedings of the 2006 1st International Symposium on Wireless Pervasive Computing, Phuket, Thailand, 16–18 January 2006; p. 6. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Work | Frequency | UAV | Scenario | Height | Channel Statistics |
|---|---|---|---|---|---|
| [10] | 2 GHz | Airship | Urban | 100–170 m | PDF, CDF, AFD, LCR, PSD, AF |
| [11] | 2 GHz | Airship | Urban | 150–300 m | PL |
| [12] | 5.76 GHz 1.817 GHz | Hexacopter | Suburban | 0–50 m | PL, SF, K, RMS, CDF |
| [13] | 4.3 GHz | Quadcopter | Open field, Suburban | 4–16 m | PL, SF, , , PDF, CDF, RMS, BC |
| [14] | 2.4 GHz | Hexacopter | Laboratory, Open air | 10–40 m | PL, PAS, K, |
| [15] | 802.11a | Quadcopter | Open field | 15–110 m | PL, PAS, CDF |
| [16] | 802.11a | Quadcopter | Open field, Field area | 20–100 m | PL |
| [17] | 802.11a | Fixed Wing | Aerodrome | 46 m | PL |
| [18] | 802.11a/g, 900 MHz | Fixed Wing | Aerodrome, Rural | 46 m, 107–274 m | PL |
| [19] | GSM, UMTS | Fixed Wing, Capture balloon | Urban, Rural | 0–500 m | PL |
| [20] | GSM, UMTS, LTE | Weather balloon | Urban | 11–18 m | PL |
| [21] | LTE (800 MHz) | Hexacopter | Rural | 15–100 m | PL, SF |
| [22] | LTE (850 MHz) | Quadcopter | Suburban | 15–120 m | PL, SF |
| [23] | 2 GHz | Airship | Urban, Wooded Region | 100–170 m | CDF, DG, AFD, LCR |
| [24] [25] | 5.8 GHz | Octocopter | Residential | - | RMS, DS, CDF |
| [26] | 802.11b/g | Fixed Wing | Agricultural region | 75 m | AF, DG |
| [27] | PCS, AWS, 700 MHz | Quadcopter | Mix Suburban | 122 m | PL, CDF |
| [28] | EDGE, HSPA+, LTE | Hexacopter | - | 10–100 m | RTT, J |
| [29] | 909 MHz | Quadcopter | Open field, Simulated Village | 40–60 m | PL, PES |
| [30] | 2/3.5/5.5 GHz | HAP airship | Built-up areas | - | SF |
| [31] | 2.585 GHz | Hexacopter | Suburban | 15–300 m | PDP, RMS, DS |
| [32] | 3.4/3.8 GHz | Commercial UAV | Open area | 5–15 m | PDP, RMS |
| This work | 915 MHz | Quadcopter | Lake, Caatinga | 8–80 m | PL, LCR, CDF, DS, SF, K, , , m, , |
| Schedule | Temperature | Average Wind Speed |
|---|---|---|
| 10:00 | 31 °C | 31 km/h |
| 11:00 | 31 °C | 28 km/h |
| 12:00 | 31 °C | 33 km/h |
| 13:00 | 31 °C | 28 km/h |
| 14:00 | 30 °C | 33 km/h |
| 15:00 | 30 °C | 35 km/h |
| 16:00 | 30 °C | 28 km/h |
| 17:00 | 29 °C | 24 km/h |
| Velocity | Height | Traveled Distance |
|---|---|---|
| 1 km/h | 8 m | 120 m |
| 1 km/h | 80 m | 150 m |
| 3 km/h | 8 m | 120 m |
| 3 km/h | 80 m | 150 m |
| Velocity | Height | Traveled Distance |
|---|---|---|
| 1 km/h | 80 m | 130 m |
| 3 km/h | 80 m | 250 m |
| Velocity | Height | Traveled Distance |
|---|---|---|
| 1 km/h | 80 m | 150 m |
| 3 km/h | 80 m | 150 m |
| Environment | Path Loss Exponent | Speed (km / h) | Height (m) |
|---|---|---|---|
| Lake | −7.8 | 1 | 8 |
| Lake | −8.9 | 3 | 8 |
| Lake | 2.9 | 1 | 80 |
| Lake | 2.0 | 3 | 80 |
| Mixed region | 3.7 | 1 | 80 |
| Mixed region | 3.8 | 3 | 80 |
| Caatinga | 3.7 | 1 | 80 |
| Caatinga | 1.9 | 3 | 80 |
| Environment | Height (m) | Speed (km/h) | Average () | Standard Deviation () | Window |
|---|---|---|---|---|---|
| Lake | 8 | 1 | −0.036457 | 4.9594 | 10 |
| Lake | 8 | 3 | −0.00010684 | 5.1219 | 5 |
| Lake | 80 | 1 | 0.014171 | 1.5940 | 15 |
| Lake | 80 | 3 | 0.019407 | 1.3563 | 15 |
| Mixed region | 80 | 1 | 0.021741 | 1.8036 | 10 |
| Mixed region | 80 | 3 | 0.023567 | 1.4659 | 20 |
| Caatinga | 80 | 1 | 0.0089469 | 2.6579 | 10 |
| Caatinga | 80 | 3 | −0.0052443 | 3.0010 | 15 |
| Window | Nakagami (m, ) | Rice (K) | Rayleigh () | Weibull (, ) | Height (m) | Environment | Velocity (km/h) |
|---|---|---|---|---|---|---|---|
| 10 | 0.42621, 4.0043 | 0.00033815 | 1.415 | 1.1251, 1.4969 | 8 | Lake | 1 |
| 5 | 0.54171, 1.8553 | 0.00032789 | 0.96315 | 1.3129, 1.1415 | 8 | Lake | 3 |
| 15 | 0.4374, 2.6966 | 0.00027749 | 1.1612 | 1.1512, 1.2552 | 80 | Caatinga | 1 |
| 15 | 0.43961, 2.6205 | 0.00027911 | 1.1447 | 1.1688, 1.2184 | 80 | Caatinga | 3 |
| 10 | 0.44587, 2.4439 | 0.0002916 | 1.1054 | 1.1751, 1.1859 | 80 | Mixed region | 1 |
| 20 | 0.37927, 3.2004 | 0.00020356 | 1.265 | 1.0619, 1.2123 | 80 | Mixed region | 3 |
| 10 | 0.35111, 2.3994 | 0.00027483 | 1.0953 | 1.0072, 1.0094 | 80 | Lake | 1 |
| 15 | 0.37418, 3.3069 | 0.00019419 | 1.2859 | 1.0548, 1.2181 | 80 | Lake | 3 |
| UAV Speed (km/h) | Doppler Frequency (Minimum–Maximum) |
|---|---|
| 1 | 0–0.86 Hz |
| 3 | 0–2.6031 Hz |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Leite, D.L.; Alsina, P.J.; de Medeiros Campos, M.M.; de Sousa, V.A., Jr.; de Medeiros, A.A.M. Unmanned Aerial Vehicle Propagation Channel over Vegetation and Lake Areas: First- and Second-Order Statistical Analysis. Sensors 2022, 22, 65. https://doi.org/10.3390/s22010065
Leite DL, Alsina PJ, de Medeiros Campos MM, de Sousa VA Jr., de Medeiros AAM. Unmanned Aerial Vehicle Propagation Channel over Vegetation and Lake Areas: First- and Second-Order Statistical Analysis. Sensors. 2022; 22(1):65. https://doi.org/10.3390/s22010065
Chicago/Turabian StyleLeite, Deyvid L., Pablo Javier Alsina, Millena M. de Medeiros Campos, Vicente A. de Sousa, Jr., and Alvaro A. M. de Medeiros. 2022. "Unmanned Aerial Vehicle Propagation Channel over Vegetation and Lake Areas: First- and Second-Order Statistical Analysis" Sensors 22, no. 1: 65. https://doi.org/10.3390/s22010065
APA StyleLeite, D. L., Alsina, P. J., de Medeiros Campos, M. M., de Sousa, V. A., Jr., & de Medeiros, A. A. M. (2022). Unmanned Aerial Vehicle Propagation Channel over Vegetation and Lake Areas: First- and Second-Order Statistical Analysis. Sensors, 22(1), 65. https://doi.org/10.3390/s22010065