
Estimating Water Transport from Short-Term Vessel-Based and Long-Term Bottom-Mounted Acoustic Doppler Current Profiler Measurements in an Arctic Lagoon Connected to the Beaufort Sea


Abstract
:1. Introduction
2. Materials and Methods
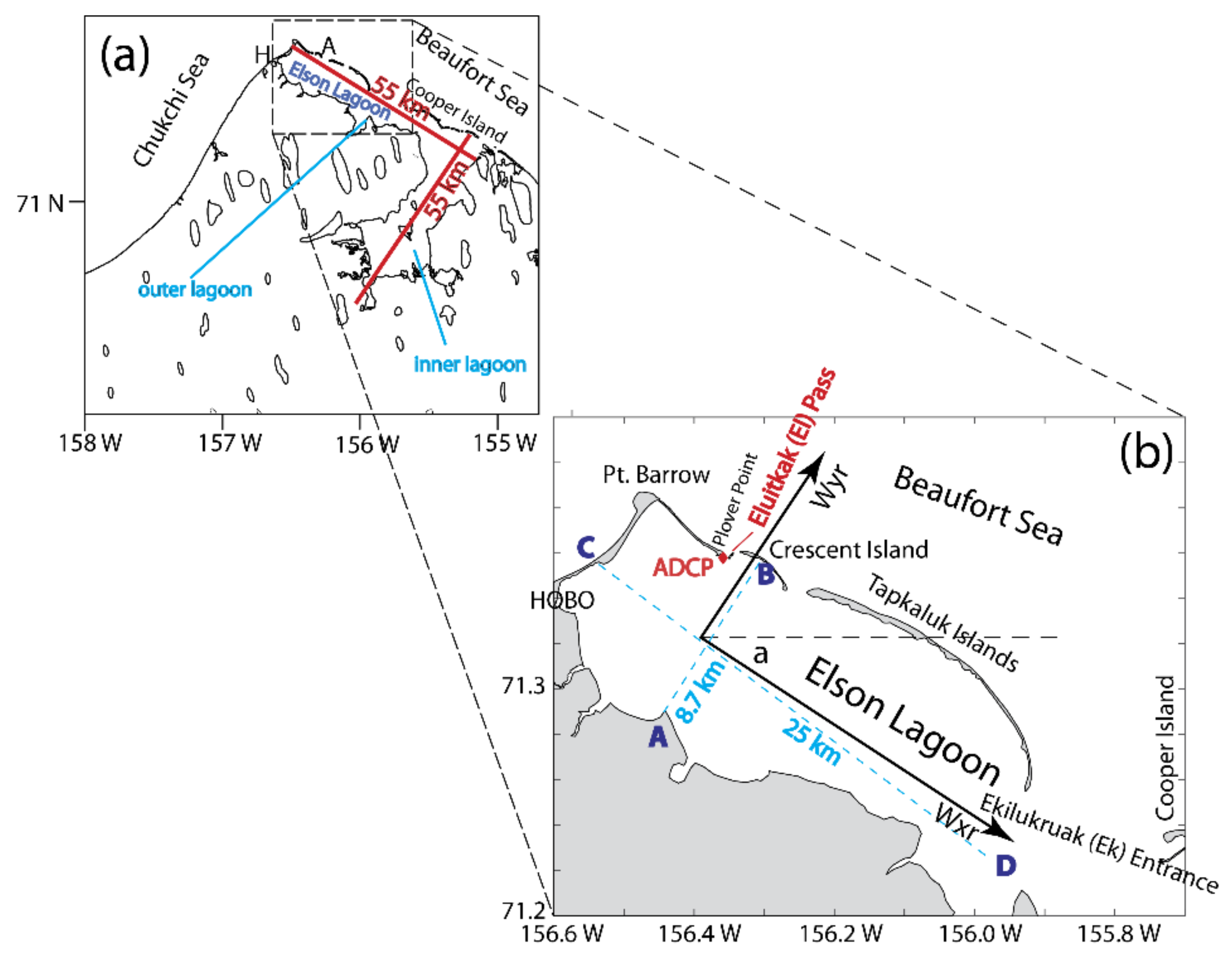
2.1. Study Site
2.2. Instruments
2.3. Measurements
2.4. Data Processing
3. Results
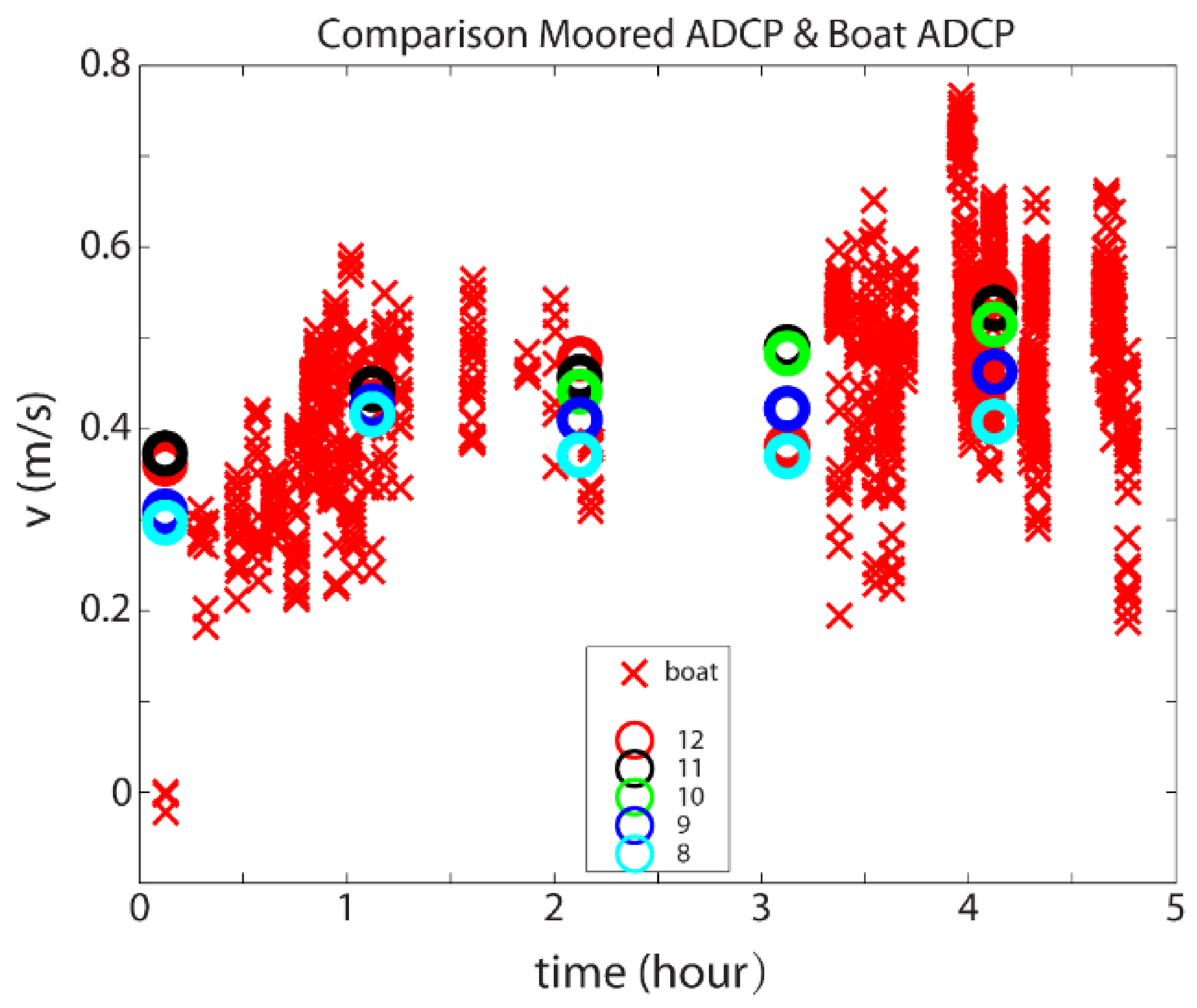
3.1. Velocity Comparison
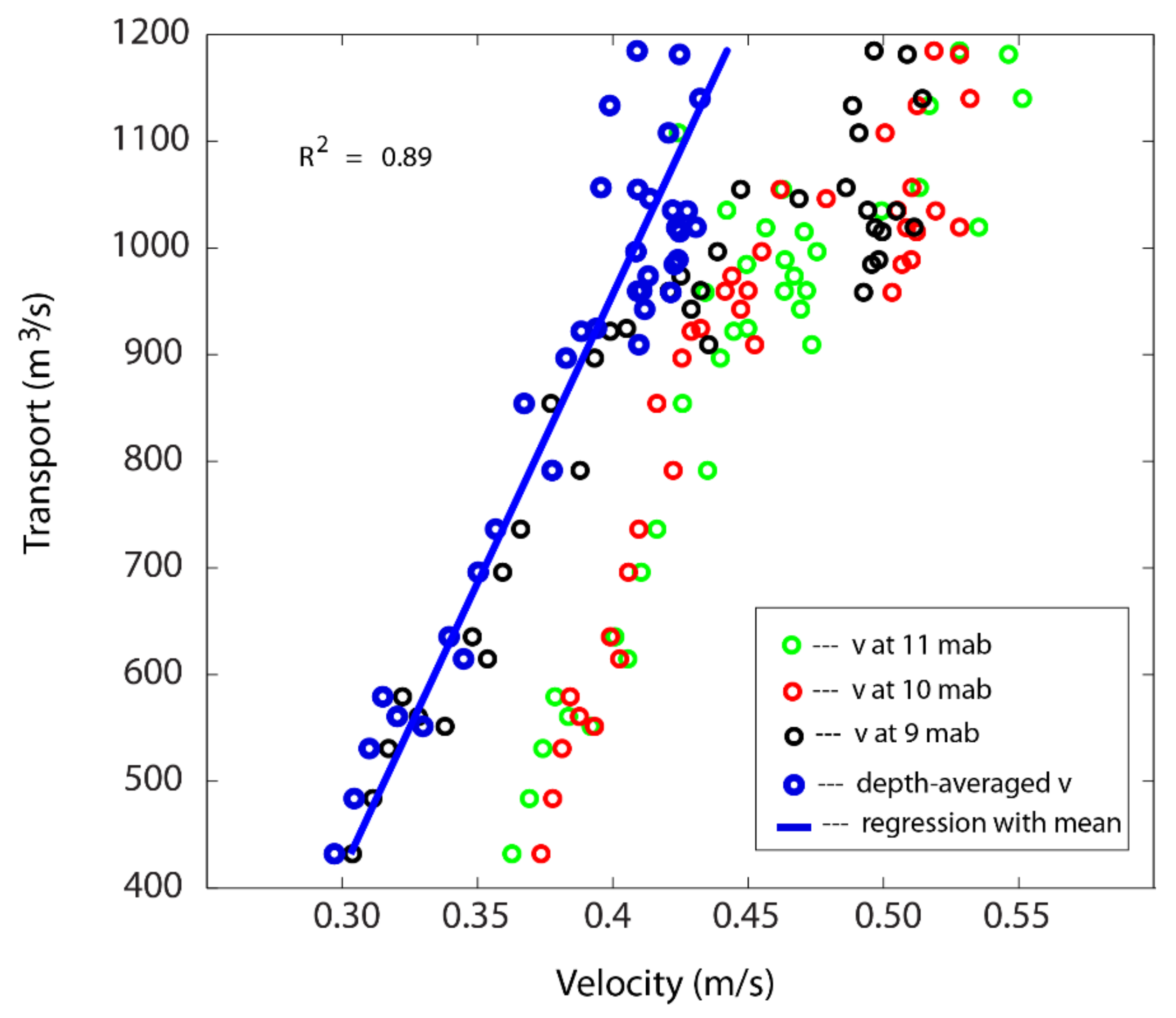
3.2. Regression of Transport
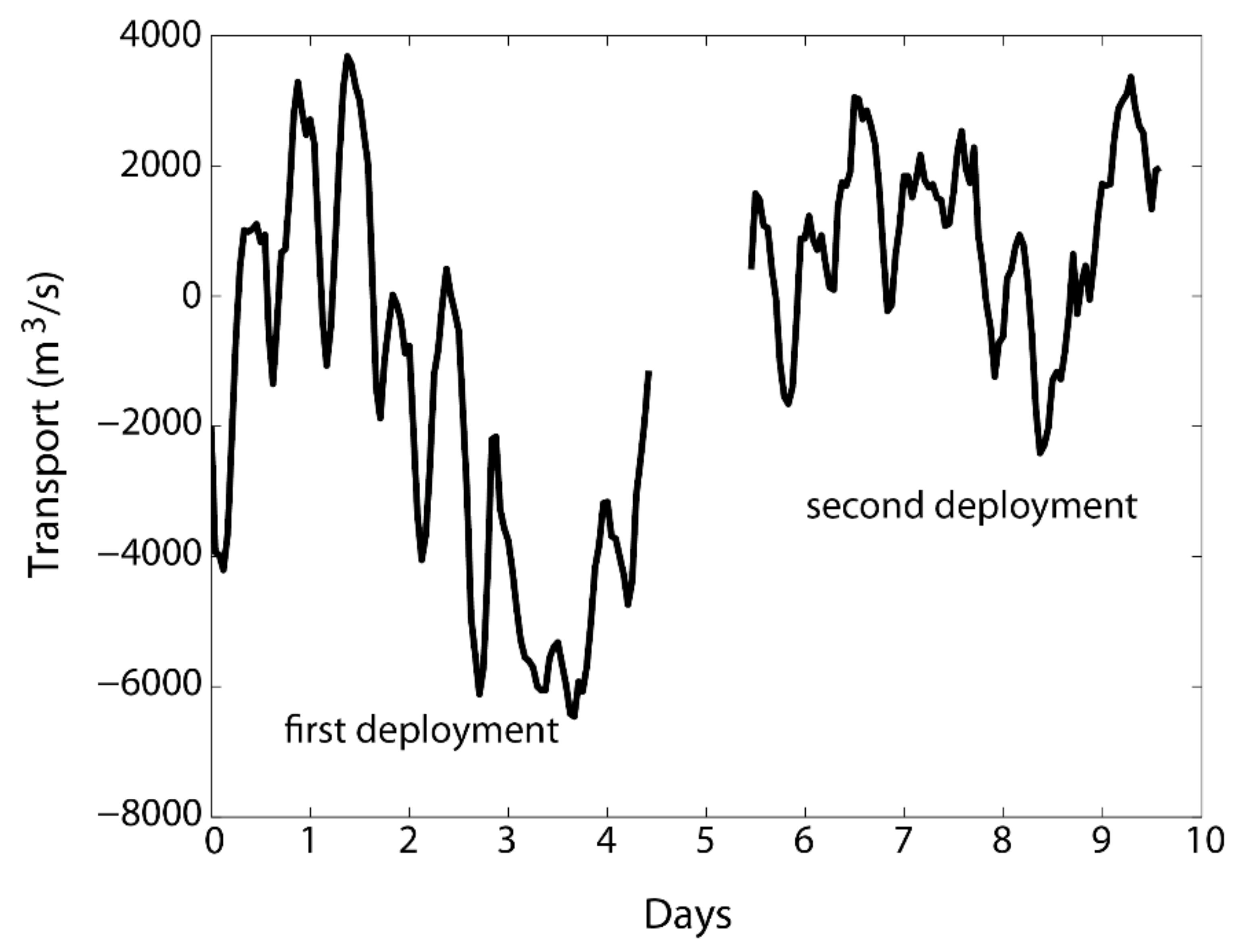
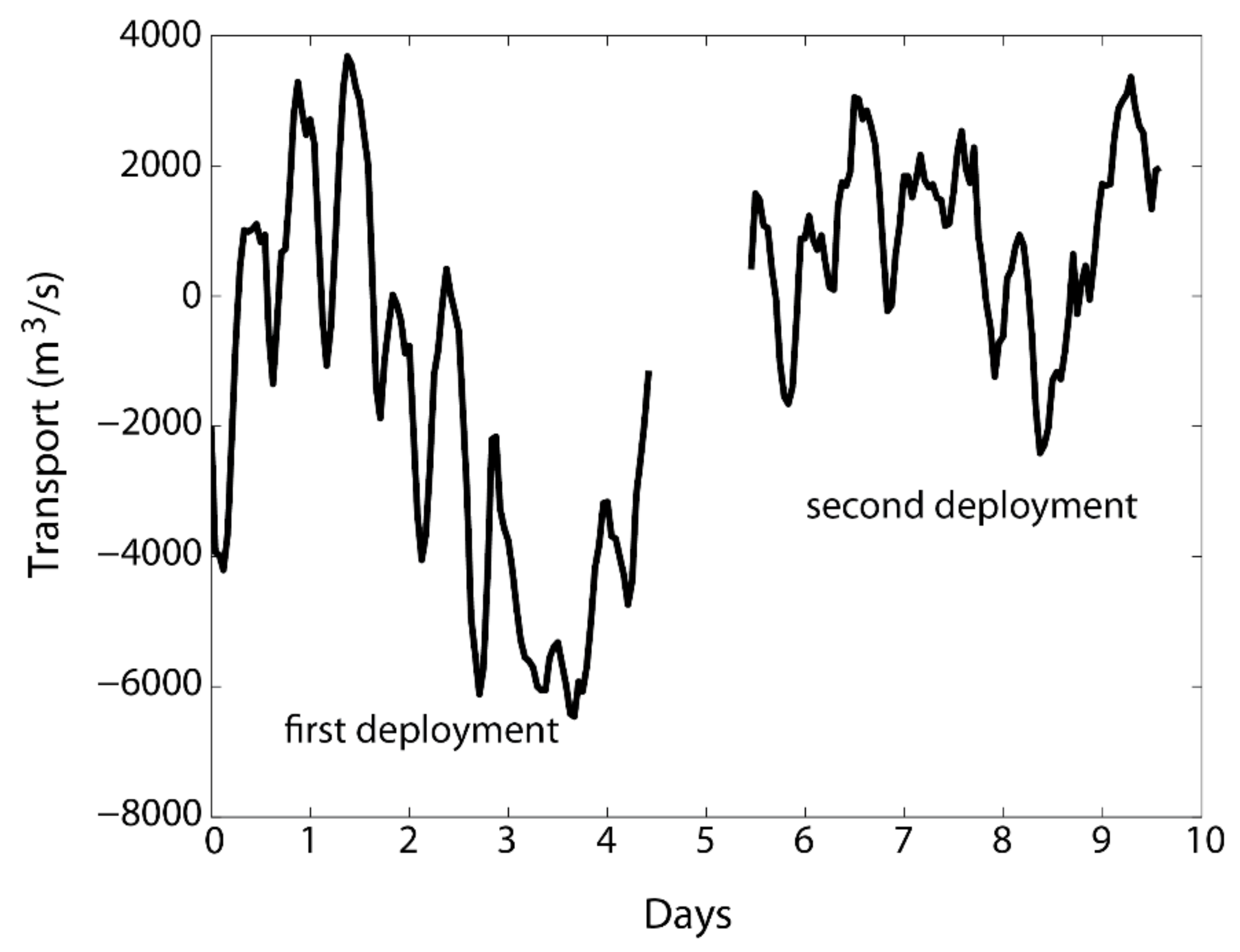
3.3. Transport Time Series
4. Discussion
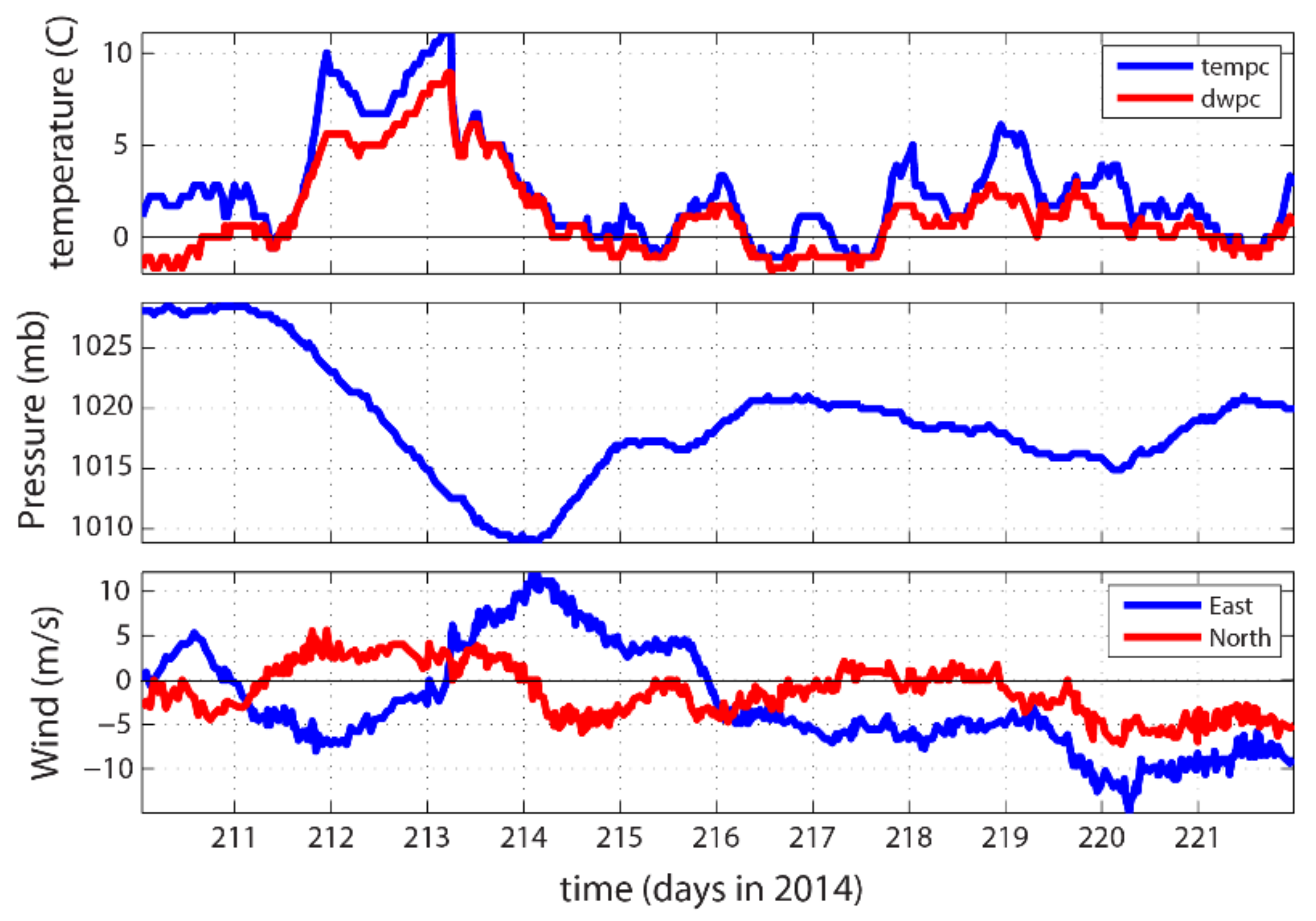
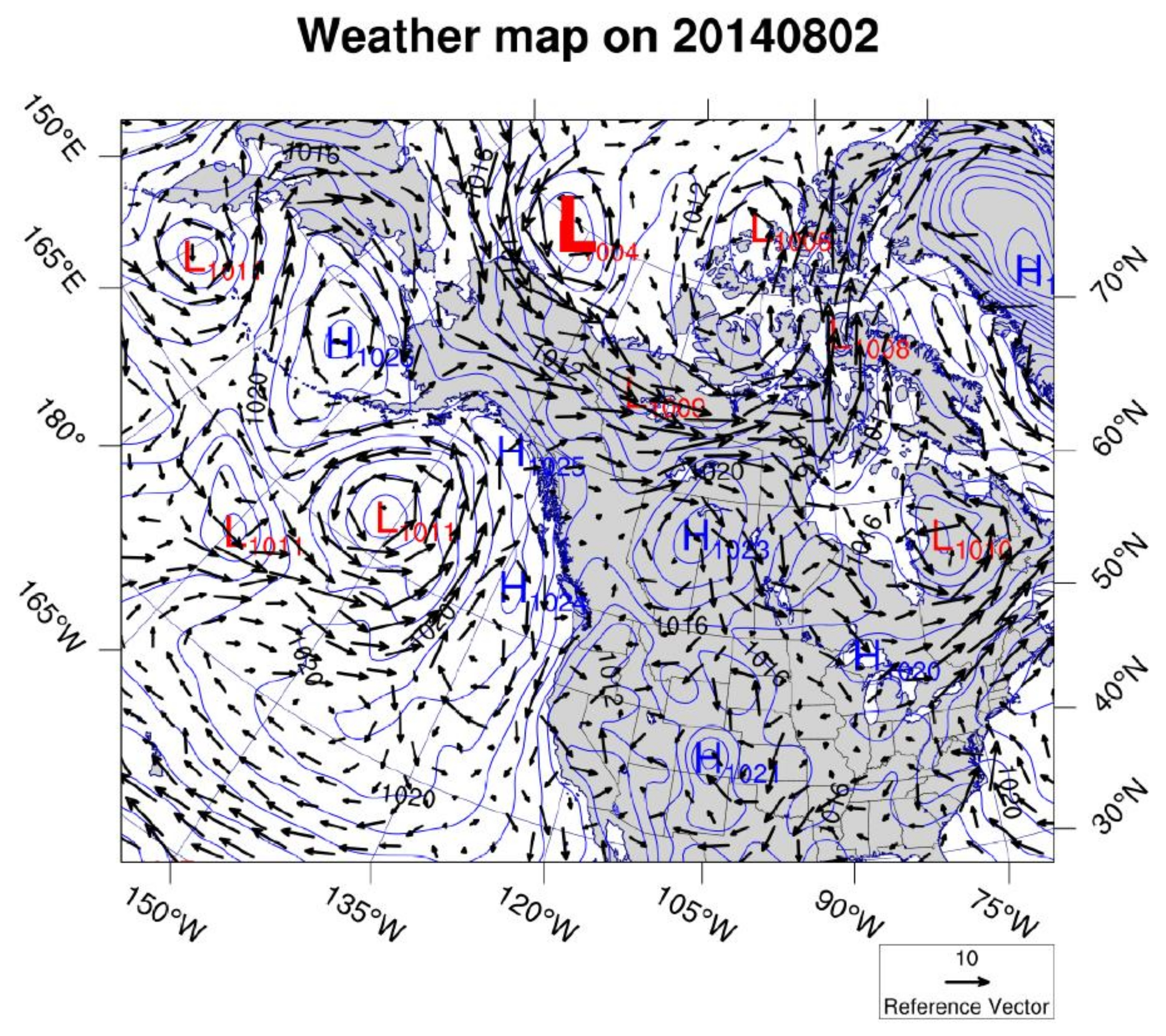
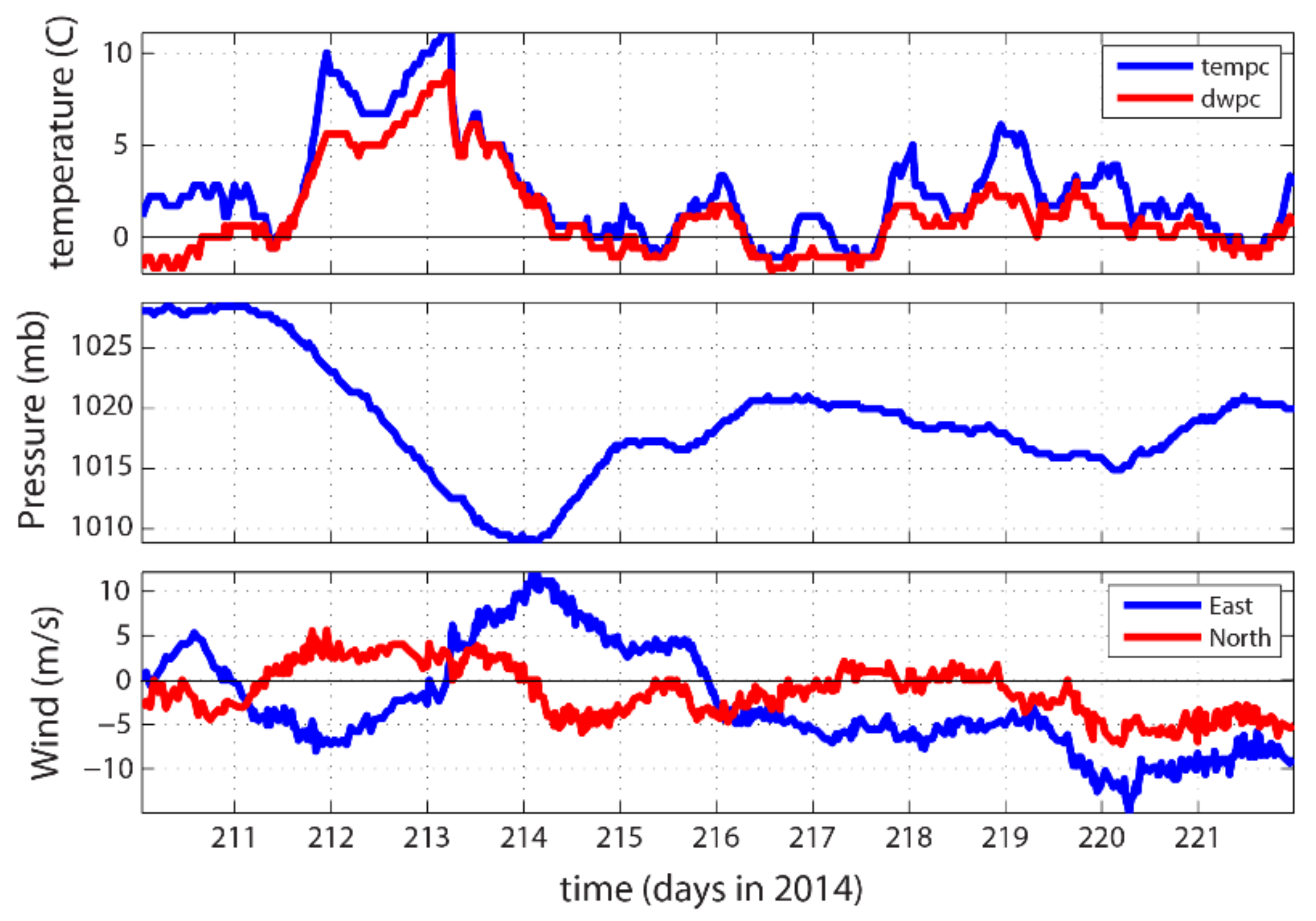
4.1. Weather Conditions
4.2. Comment about the Method
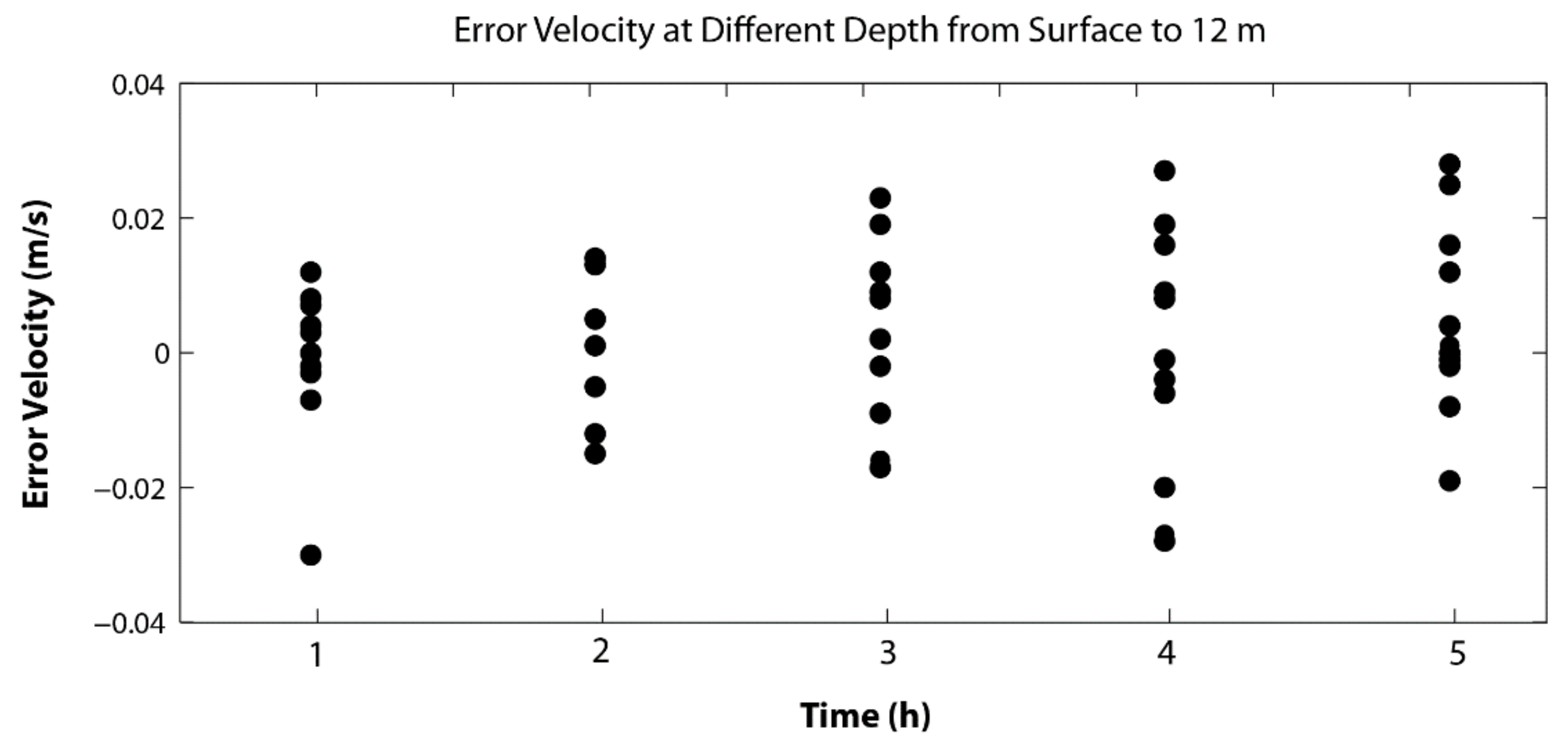
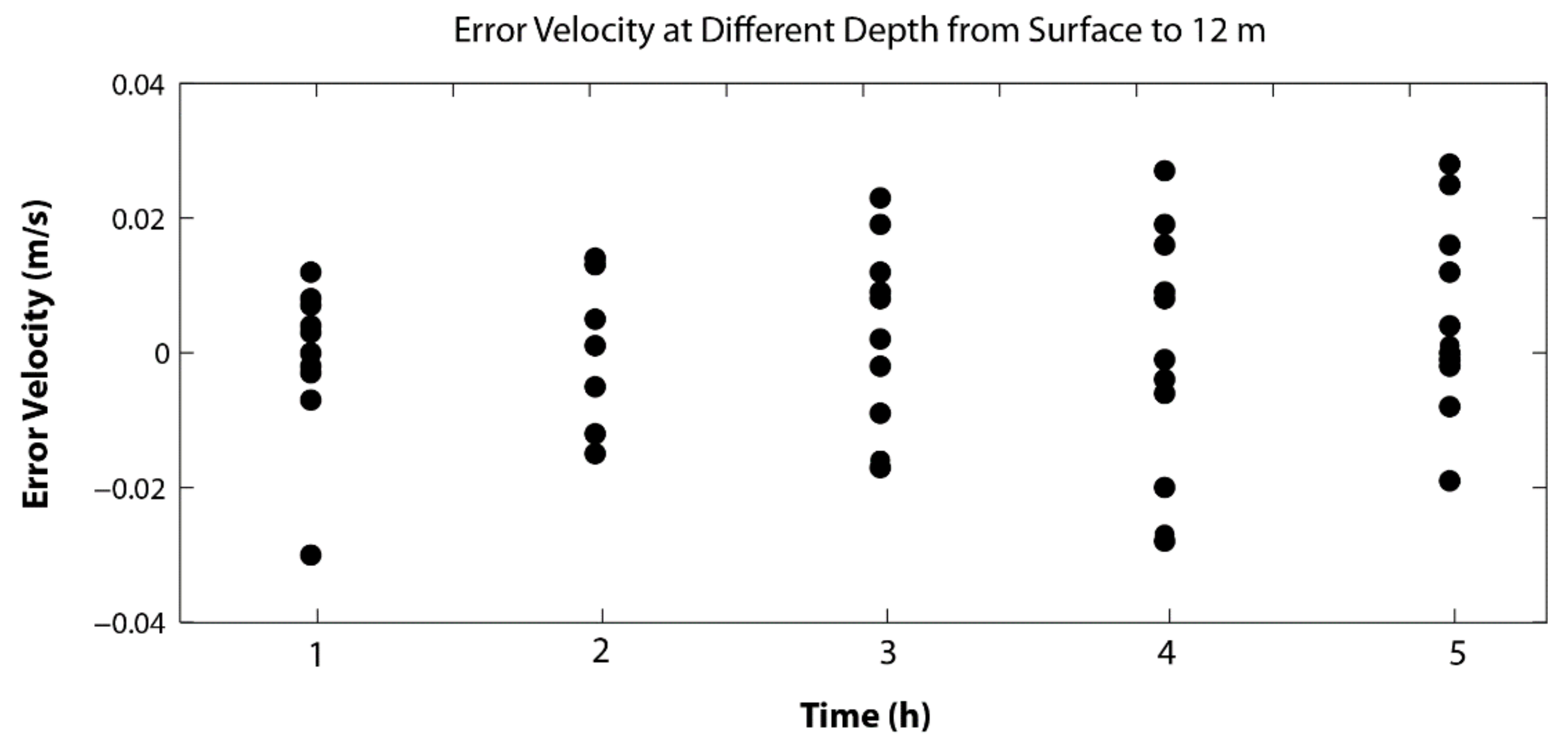
4.3. On the Measurement Errors
5. Concluding Remarks
- (1)
- The time from all relevant equipment (bottom-mounted ADCP, vessel-based ADCP, and GPS) must be unified with the GPS time. UTC should be used to avoid confusion with the local time and/or daylight-saving time.
- (2)
- The vessel-based ADCP should use the “bottom-tracking mode” unless the sea bottom is not solid (such as full of fluid mud). This in most cases will enhance the quality of the velocity data. In regions where water depth is too large and the sampling frequency of the ADCP is too high such that the ADCP could not sense the bottom, the “navigational mode” needs to be used, which in most cases might significantly increase the error of velocity measurements unless a high-resolution RTK GPS system is used. This is because of the random errors from the raw GPS, especially when high sampling rate is required for obtaining ADCP ensemble velocity values (e.g., 7-40 measurements are made to obtain a 1-s ensemble value for the M9 in our study, Table 1). In the case of using navigational mode, a temporal average of the ensemble velocity data can help in reducing the velocity error. Fortunately, this is unlikely in most coastal waters such as estuaries and lagoons because of their inherently shallow water. For example, the M9 ADCP can successfully use bottom-tracking mode in waters of 25 m. For a 600 KHz RDI ADCP, this depth can be increased to 60 m or more.
- (3)
- The repeated measurements across the transect are very important to establish the statistical regression coefficients between the transport (from bottom-mounted ADCP) and velocity (from the vessel-based ADCP). In general, the more repetitions, the better.
- (4)
- The temporal length of the measurements should be “long enough” to include certain variability of the flow velocity and total cross-sectional transport. In a tidal environment, this depends on the type of tides. The time should be long enough over which the flow velocity experiences sufficient variations for obtaining a reliable statistical regression. For a semi-diurnal tidal environment, the whole tidal cycle is about 12 h, and over 3–4 h, the flow can experience 1/4 to 1/3 of the one period for tidal currents, although measurements over a complete tidal cycle is preferred if possible [39].
- (5)
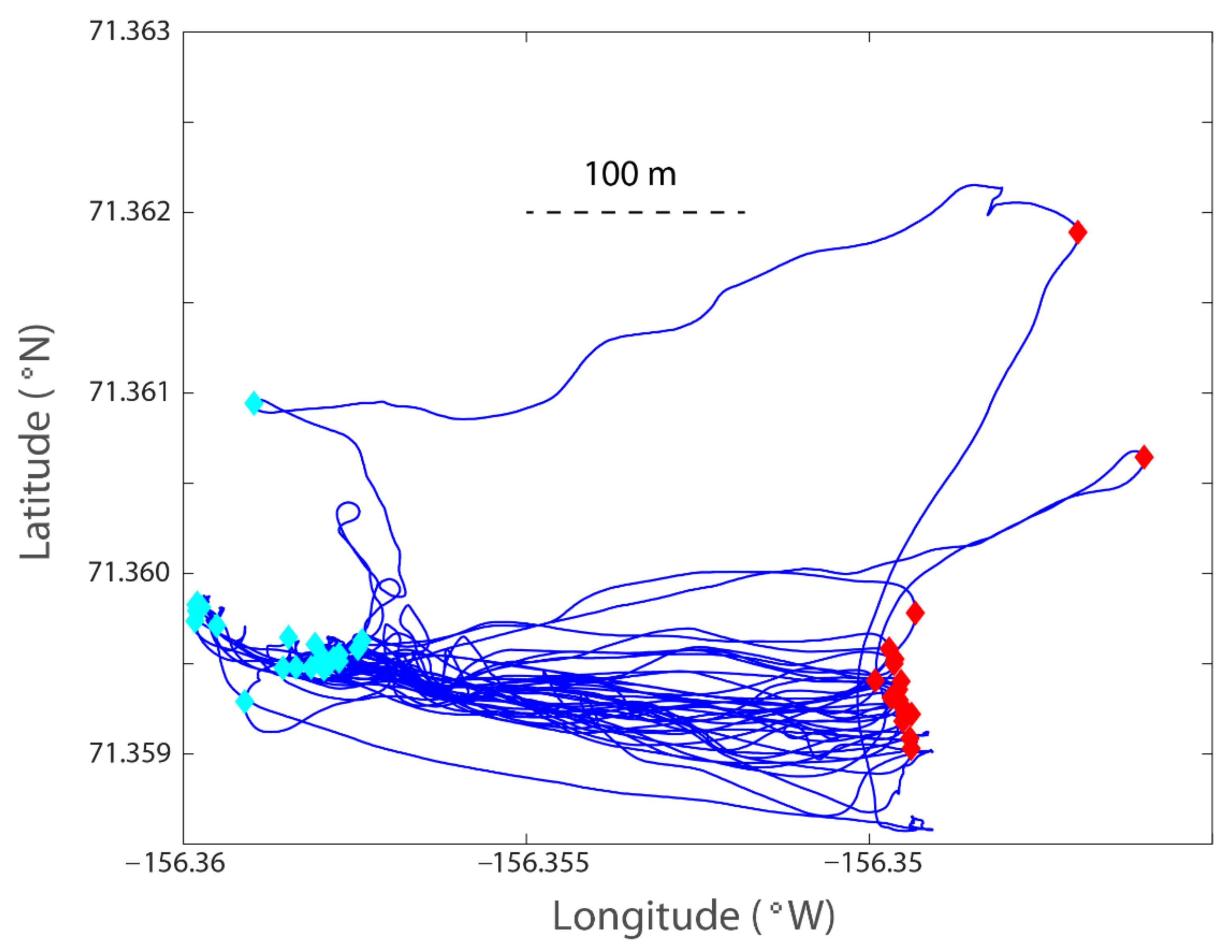
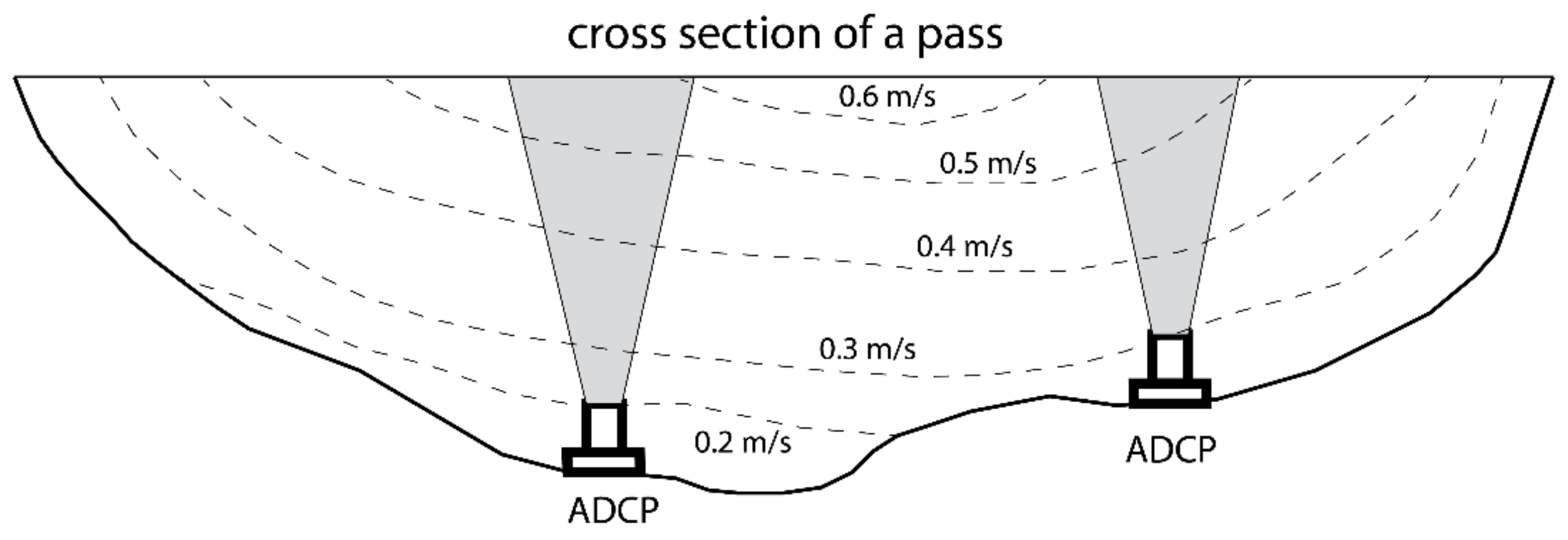
- The cross-channel transect should pass the deployed ADCP: the closer the better. In choppy conditions, this might be difficult, but with numerous repetitions, enough valid samplings can be guaranteed.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Voti, R.L.; Bertolotti, M. Thermal waves emitted by moving sources and the Doppler effect. Int. J. Heat Mass Transf. 2021, 176, 121098. [Google Scholar] [CrossRef]
- Feynman, R.P.; Leighton, R.B.; Sands, M. The Feynman Lectures on Physics; Volume 1: Mainly Mechanics, Radiation, and Heat; California Institute of Technology: Pasadena, CA, USA, 1963; p. 967. [Google Scholar]
- Walker, J. Fundamentals of Physics, 10th ed.; Wiley: Hoboken, NJ, USA, 2013; p. 1386. [Google Scholar]
- Alabaster, C. Pulse Doppler Radar—Principles, Technology, Applications; SCiTECH: Edison, NJ, USA, 2012; p. 411. [Google Scholar]
- Bech, J.; Chau, J.L. Doppler RADAR Observations—Weather RADAR, Wind Profiler, Ionospheric RADAR, and Other Advanced Applications; InTech: Rijeka, Croatia, 2012; p. 470. [Google Scholar]
- Refan, M.; Hangan, H.; Wurman, J.; Kosiba, K. Doppler radar-derived wind field of five tornado events with application to engineering simulations. Eng. Struct. 2017, 148, 509–521. [Google Scholar] [CrossRef]
- Thiruvengadam, P.; Indu, J.; Ghosh, S. Assimilation of Doppler Weather Radar data with a regional WRF-3DVAR system: Impact of control variables on forecasts of a heavy rainfall case. Adv. Water Resour. 2019, 126, 24–39. [Google Scholar] [CrossRef]
- Dutta, D.; Sharma, S.; Sen, G.; Kannan, B.; Venketswarlu, S.; Gairola, R.; Das, J.; Viswanathan, G.; Sharma, S.K. An Artificial Neural Network based approach for estimation of rain intensity from spectral moments of a Doppler Weather Radar. Adv. Space Res. 2011, 47, 1949–1957. [Google Scholar] [CrossRef]
- Chen, Z.-Q.; Kavvas, M. An automated method for representing, tracking and forecasting rain fields of severe storms by Doppler weather radars. J. Hydrol. 1992, 132, 179–200. [Google Scholar] [CrossRef]
- Xie, H.; Zhou, X.; Vivoni, E.R.; Hendrickx, J.M.; Small, E.E. GIS-based NEXRAD Stage III precipitation database: Automated approaches for data processing and visualization. Comput. Geosci. 2005, 31, 65–76. [Google Scholar] [CrossRef]
- Krajewski, W.F.; Ntelekos, A.A.; Goska, R. A GIS-based methodology for the assessment of weather radar beam blockage in mountainous regions: Two examples from the US NEXRAD network. Comput. Geosci. 2006, 32, 283–302. [Google Scholar] [CrossRef]
- Solabarrieta, L.; Rubio, A.; Castanedo, S.; Medina, R.; Charria, G.; Hernandez, C. Surface water circulation patterns in the southeastern Bay of Biscay: New evidences from HF radar data. Cont. Shelf Res. 2014, 74, 60–76. [Google Scholar] [CrossRef] [Green Version]
- Liu, Y.; Weisberg, R.H.; Vignudelli, S.; Roblou, L.; Merz, C. Comparison of the X-TRACK altimetry estimated currents with moored ADCP and HF radar observations on the West Florida Shelf. Adv. Space Res. 2012, 50, 1085–1098. [Google Scholar] [CrossRef]
- Chioua, J.; Dastis, C.; González, C.; Reyes, E.; Mañanes, R.; Ruiz, M.; Álvarez, E.; Yanguas, F.; Romero, J.; Bruno, M. Water exchange between Algeciras Bay and the Strait of Gibraltar: A study based on HF coastal radar. Estuar. Coast. Shelf Sci. 2017, 196, 109–122. [Google Scholar] [CrossRef]
- Mujiasih, S.; Hartanto, D.; Beckers, J.-M.; Barth, A. Reducing the error in estimates of the Sunda Strait currents by blending HF radar currents with model results. Cont. Shelf Res. 2021, 228, 104512. [Google Scholar] [CrossRef]
- Jeanette Romero-Cozar, J.C.; Bolado-Penagos, M.; Reyes-Perez, J.; Gomiz-Pascual, J.J.; Vazquez, A.; Sirviente, S.; Bruno, M. Tidally-induced submesoscale features in the atlantic jet and Western Alboran Gyre: A study based on HF radar and satellite images. Estuar. Coast. Shelf Sci. 2021, 250, 107122. [Google Scholar] [CrossRef]
- Schoch, G.C.; McCammon, M. Demonstrating the Alaska Ocean Observing System in Prince William Sound. Cont. Shelf Res. 2013, 63, S149–S158. [Google Scholar] [CrossRef]
- Insanic, E.; Siqueira, P.R. Real-Time Vector Velocity Estimation in Doppler Radar Networks. IEEE Trans. Geosci. Remote Sens. 2011, 50, 568–584. [Google Scholar] [CrossRef]
- Teledyne, R.D. Instruments. Acoustic Doppler Current Profiler Principles of Operation a Practical Primer; Teledyne R.D. Instruments: Poway, CA, USA, 2011; p. 56. [Google Scholar]
- Book, J.W.; Perkins, H.T.; Cavaleri, L.; Doyle, J.D.; Pullen, J.D. ADCP observations of the western Adriatic slope current during winter of 2001. Prog. Oceanogr. 2005, 66, 270–286. [Google Scholar] [CrossRef] [Green Version]
- Moore, S.A.; le Coz, J.; Hurther, D.; Paquier, A. On the application of horizontal ADCPs to suspended sediment transport surveys in rivers. Cont. Shelf Res. 2012, 46, 50–63. [Google Scholar] [CrossRef]
- Li, C.; Huang, W.; Milan, B. Atmospheric Cold Front–Induced Exchange Flows through a Microtidal Multi-Inlet Bay: Analysis Using Multiple Horizontal ADCPs and FVCOM Simulations. J. Atmos. Ocean. Technol. 2019, 36, 443–472. [Google Scholar] [CrossRef]
- AlYousifa, A.; Valle-Levinson, A.; Adams, P.N.; Laurel-Castillo, J.A. Tidal and subtidal hydrodynamics over ridge-swale bathymetry. Cont. Shelf Res. 2021, 219, 104392. [Google Scholar] [CrossRef]
- Li, C.; White, J.R.; Chen, C.; Lin, H.; Weeks, E.; Galvan, K.; Bargu, S. Summertime tidal flushing of Barataria Bay: Transports of water and suspended sediments. J. Geophys. Res. 2011, 116. [Google Scholar] [CrossRef]
- Li, C. Axial convergence fronts in a barotropic tidal inlet—Sand shoal inlet, VA. Cont. Shelf Res. 2002, 22, 2633–2653. [Google Scholar] [CrossRef]
- Savidge, D.K.; Amft, J.A. Circulation on the West Antarctic Peninsula derived from 6 years of shipboard ADCP transects. Deep Sea Res. 2009, 56, 1633–1655. [Google Scholar] [CrossRef]
- Alizadeh, O.; Lin, Z. Rapid Arctic warming and its link to the waviness and strength of the westerly jet stream over West Asia. Glob. Planet. Chang. 2021, 199, 103447. [Google Scholar] [CrossRef]
- You, Q.; Cai, Z.; Pepin, N.; Chen, D.; Ahrens, B.; Jiang, Z.; Wu, F.; Kang, S.; Zhang, R.; Wu, T.; et al. Warming amplification over the Arctic Pole and Third Pole: Trends, mechanisms and consequences. Earth-Sci. Rev. 2021, 217, 103625. [Google Scholar] [CrossRef]
- Kumar, A.; Yadav, J.; Mohan, R. Global warming leading to alarming recession of the Arctic sea-ice cover: Insights from remote sensing observations and model reanalysis. Heliyon 2020, 6, e04355. [Google Scholar] [CrossRef]
- Proshutinsky, A.; Krishfield, R.; Toole, J.M.; Timmermans, M.; Williams, W.; Zimmermann, S.; Yamamoto-Kawai, M.; Armitage, T.W.K.; Dukhovskoy, D.; Golubeva, E.; et al. Analysis of the Beaufort Gyre Freshwater Content in 2003–2018. J. Geophys. Res. Ocean. 2019, 124, 9658–9689. [Google Scholar] [CrossRef] [Green Version]
- Li, C. 3D analytic model for testing numerical tidal models. J. Hydraul. Eng. 2001, 127, 709–717. [Google Scholar] [CrossRef]
- Li, C. Can friction coefficient be estimated from cross stream flow structure in tidal channels? Geophys. Res. Lett. 2003, 30, 1987. [Google Scholar] [CrossRef]
- Li, C.; Boswell, K.; Chaichitehrani, N.; Huang, W.; Wu, R. Weather induced subtidal flows through multiple inlets of an arctic microtidal lagoon. Acta Oceanol. Sin. 2019, 38, 1–16. [Google Scholar] [CrossRef]
- Li, C. Tidally Induced Residual Circulation in Estuaries with Cross Channel Bathymetry. Ph.D. Thesis, University of Connecticut, Storrs, CT, USA, 1996; 242p. [Google Scholar]
- Parker, B.B. Frictional Effects on the Tidal Dynamics of Shallow Estuary. Ph.D. Thesis, The Johns Hopkins University, Baltimore, MA, USA, 1984; 291p. [Google Scholar]
- Proudman, J. Dynamical Oceanography; Methuen: London, UK, 1953; 409p. [Google Scholar]
- Butterworth, S. On the theory of filter amplifiers. Exp. Wirel. Wirel. Eng. 1930, 7, 536–541. [Google Scholar]
- Li, C. Subtidal Water Flux through a Multi-inlet System: Observations Before and During a Cold Front Event and Numerical Experiments. JGR-Ocean. 2013, 118, 1–16. [Google Scholar] [CrossRef]
- Li, C.; Weeks, E.; Huang, W.; Milan, B.; Wu, R. Weather-Induced Transport through a Tidal Channel Calibrated by an Unmanned Boat. J. Atmos. Ocean. Technol. 2018, 35, 261–279. [Google Scholar] [CrossRef]
- Li, C.; Armstrong, S.; Williams, D. Residual Eddies in a Tidal Channel. Estuaries Coasts 2006, 29, 147–158. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ADCP | Bottom Mounted 1 | Bottom Mounted 2 | Vessel Based M9 |
|---|---|---|---|
| Raw sampling interval (s) | 80 | 6 | variable (~1/7–1/40) |
| Ensemble interval | 1 h | 5 min | 1 s |
| Vertical bin size (m) | 1 | 0.25 | variable |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, C.; Boswell, K.M. Estimating Water Transport from Short-Term Vessel-Based and Long-Term Bottom-Mounted Acoustic Doppler Current Profiler Measurements in an Arctic Lagoon Connected to the Beaufort Sea. Sensors 2022, 22, 68. https://doi.org/10.3390/s22010068
Li C, Boswell KM. Estimating Water Transport from Short-Term Vessel-Based and Long-Term Bottom-Mounted Acoustic Doppler Current Profiler Measurements in an Arctic Lagoon Connected to the Beaufort Sea. Sensors. 2022; 22(1):68. https://doi.org/10.3390/s22010068
Chicago/Turabian StyleLi, Chunyan, and Kevin Mershon Boswell. 2022. "Estimating Water Transport from Short-Term Vessel-Based and Long-Term Bottom-Mounted Acoustic Doppler Current Profiler Measurements in an Arctic Lagoon Connected to the Beaufort Sea" Sensors 22, no. 1: 68. https://doi.org/10.3390/s22010068
APA StyleLi, C., & Boswell, K. M. (2022). Estimating Water Transport from Short-Term Vessel-Based and Long-Term Bottom-Mounted Acoustic Doppler Current Profiler Measurements in an Arctic Lagoon Connected to the Beaufort Sea. Sensors, 22(1), 68. https://doi.org/10.3390/s22010068