
Distributed and Scalable Radio Resource Management for mmWave V2V Relays towards Safe Automated Driving



Abstract
:1. Introduction
- (1)
- The required data rate considering driving safety is analyzed in mmWave V2V communication with relays at different inter-vehicle distances and vehicle speeds in an overtaking traffic situation, which is the basis for radio resource management;
- (2)
- A distributed radio resource management scheme is proposed to ensure mmWave V2V relaying topology scalability; First, ZigZag antenna configuration is employed in the spatial domain to mitigate the inter-link interference impact caused by the reuse of resource blocks (RBs). Further, in frequency and power domains, two transmission modes (Mode 1 and Mode 2) are defined according to the inter-vehicle distance and are switched based on the required data rate for each V2V link. The full available bandwidth is divided into two RBs, called , , respectively. In mode 1, all bandwidth is used for the current V2V link. In mode 2, one of and is selected for the current V2V link. If continuous V2V links are in the same mode, and are alternately allocated for each V2V link in a ZigZag manner.
2. Required Data Rate for Extended Sensors in Overtaking Scenarios
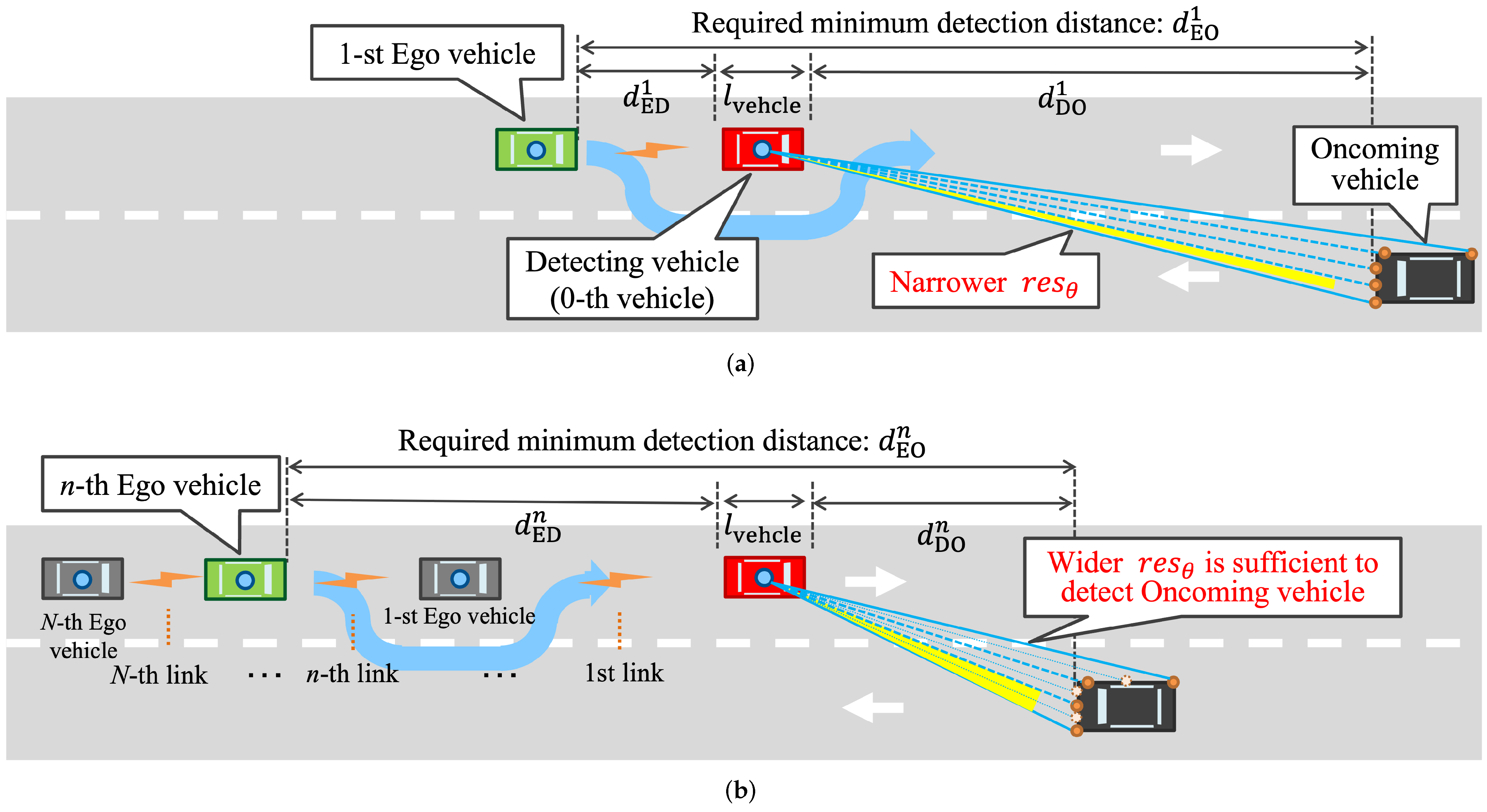
2.1. Overtaking Scenarios
2.2. Required Data Rate for Extended Sensors
2.3. V2V Relay Communications
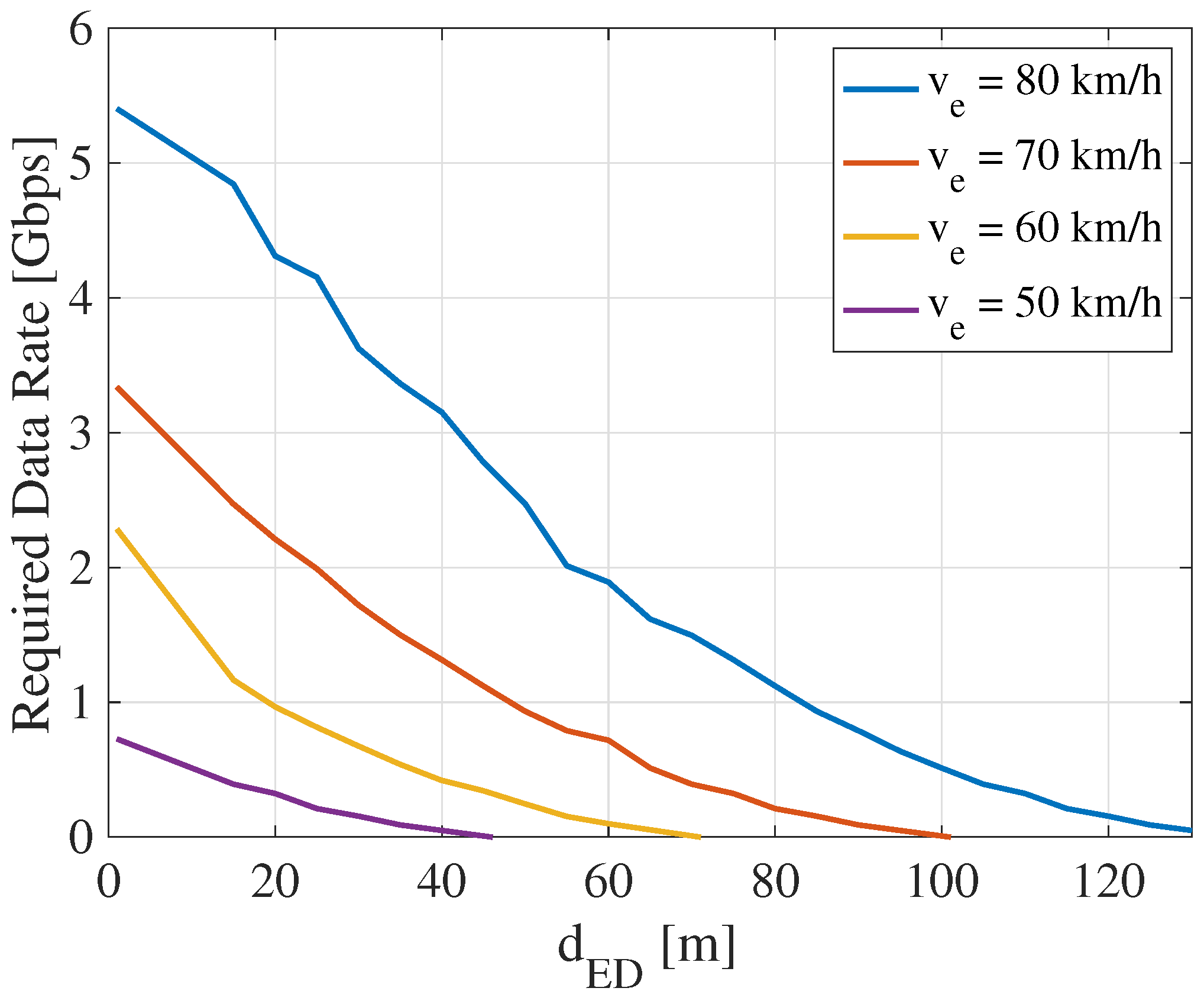
2.4. Numerical Examples
3. Proposal: Distributed Radio Resource Management
3.1. Basic Concept
3.2. Definition of Two Modes
3.3. Distributed Radio Resource Management Algorithm
3.4. Parameters Optimization
| Algorithm 1: Distributed Resource Block Allocation Scheme for V2V with relays |
| Require: |
| Ensure: |
| ifthen |
| else |
| if then |
| else |
| if |
| then |
| else |
| end if |
| end if |
| end if |
| return |
4. Performance Evaluation
4.1. Simulation Assumptions
- Antennas are located at the center of front and rear of the vehicle under the conventional antenna configuration;
- The transmit power is uniformly distributed to each RB;
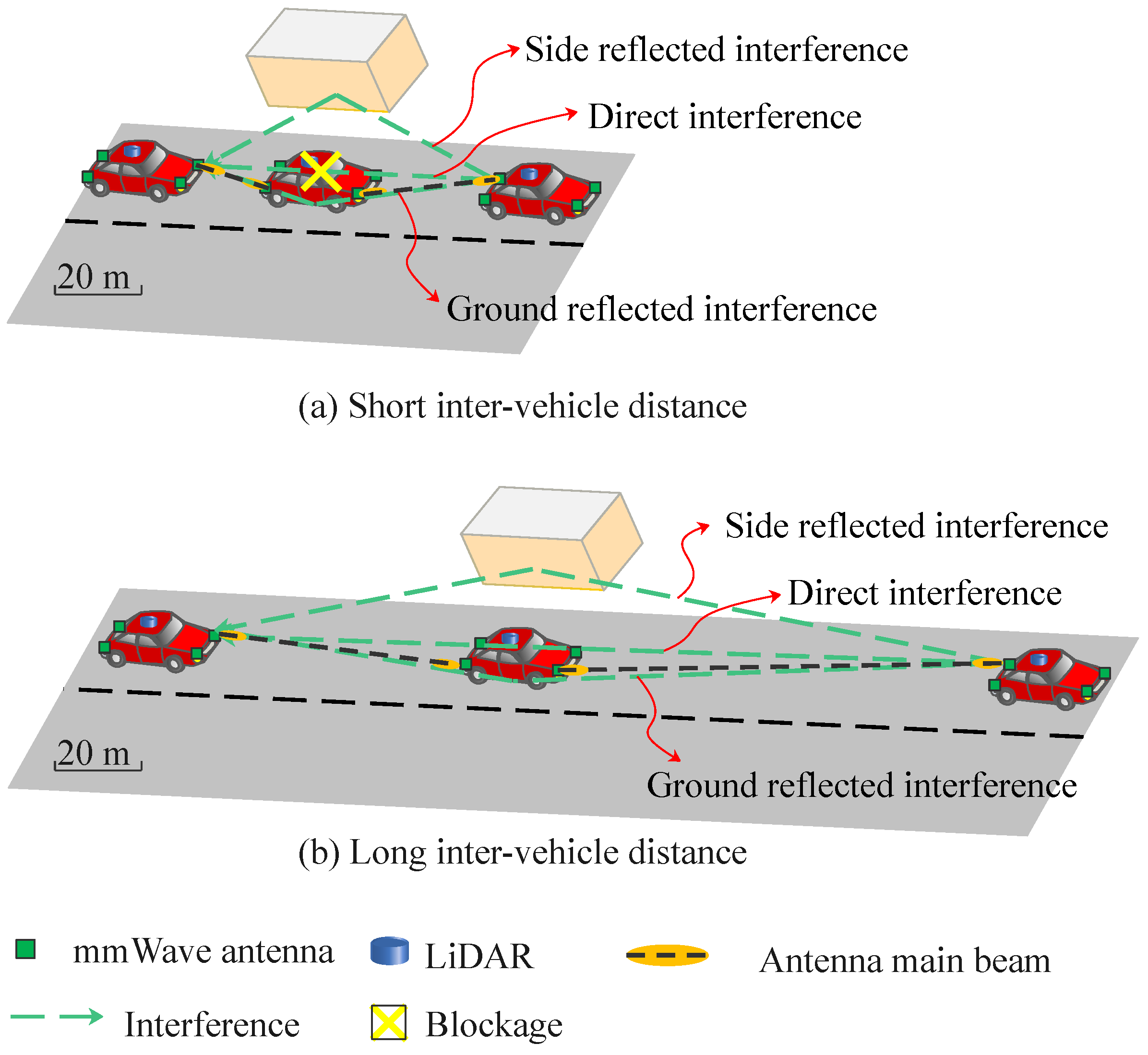
- Both ground reflection and surrounding reflection are considered as the main interference;
- The standard deviation of vertical fluctuation caused by the motors of vehicles is set to 0.0319 m [27] to evaluate the beam alignment error due to the narrow beam width;
- The antenna gains on the transmitter and receiver sides are assumed to be the same and a general radiation pattern of rectangular aperture antenna is used in this simulation as , where and are the beam width of antennas in the vertical and horizontal planes respectively [28];
- To support the RB allocation, the simulation is analyzed based on Orthogonal Frequency Division Multiplex PHY (OFDMPHY). The supported MCS (Modulation and Coding Scheme) index is 13–24;
- Channel gain of each RB is determined based on the ray-tracing model assuming urban street canyon scenario, which considers ground and wall reflections [13];
- The Signal-to-Interference-plus-Noise Ratio (SINR) of for the n-th link can be calculated bywhere is the received power of for the n-th link, is the interference of for the n-th link when the previous links also reuse the same RB. is the power of Additive White Gaussian Noise (AWGN) for all RBs and is the number of RBs;
- The throughput of the n-th link depends on and is determined by referring to MCS table;
- The E2E throughput between the n-th Ego vehicle and the Detecting vehicle is the minimum cut of link throughput as .
4.2. Results: Parameters Optimization
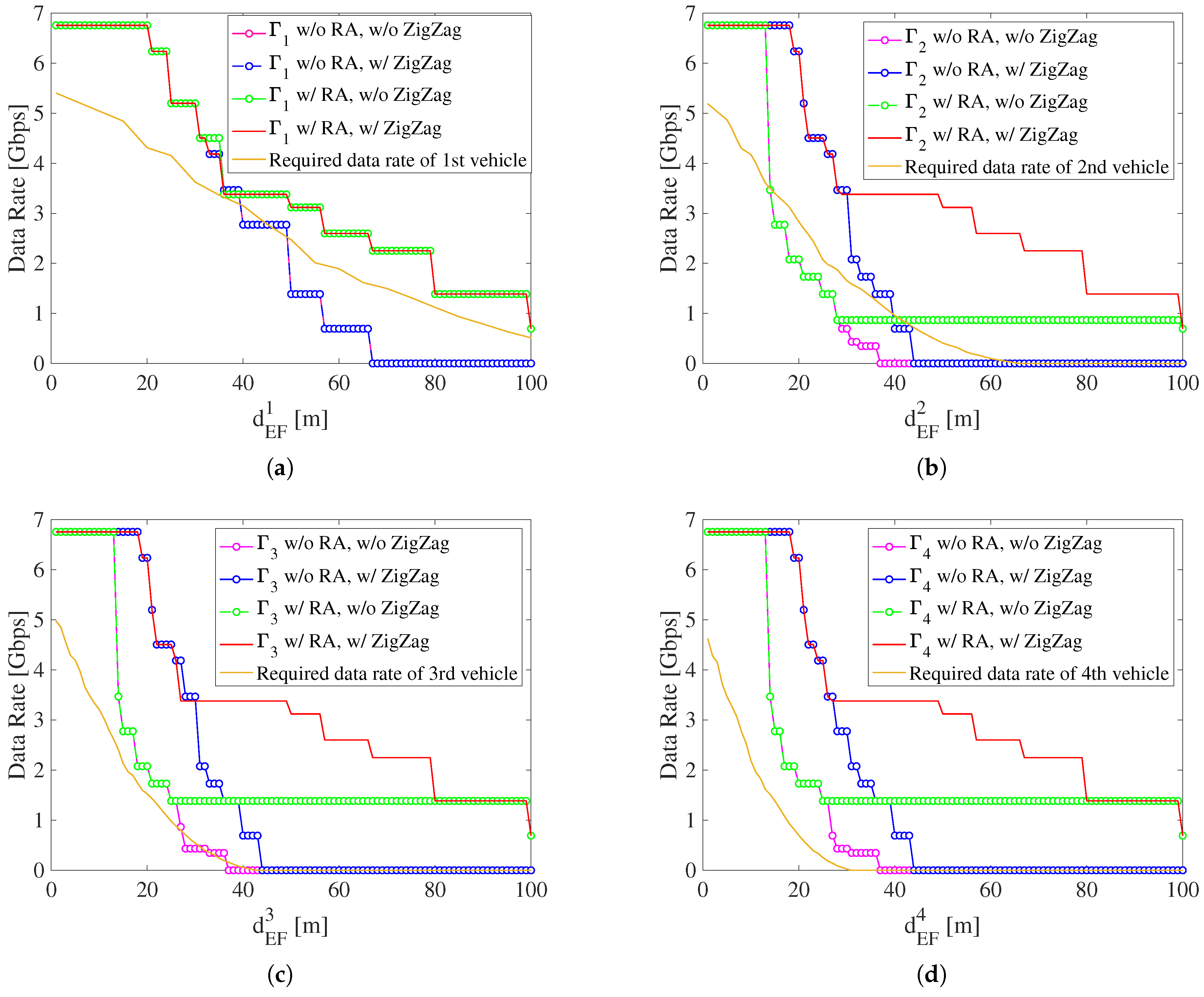
4.3. Results: Achievable E2E Throughput
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| mmWave | Millimeter-wave |
| V2V | Vehicle-to-Vehicle |
| V2X | Vehicle-to-Everything |
| E2E | End-to-End |
| NR-V2X | New Radio V2X |
| 3GPP | 3rd-Generation Partnership Project |
| LTE | Long Term Evolution |
| CSMA/CA | Carrier Sense Multiple Access with Collision Avoidance |
| RBs | Resource Blocks |
| LiDAR | Light Detection And Ranging |
| FOV | Field-Of-View |
| OFDMPHY | Orthogonal Frequency Division Multiplex PHY |
| MCS | Modulation and Coding Scheme |
| SINR | Signal-to-Interference-plus-Noise Ratio |
| AWGN | Additive White Gaussian Noise |
| RA | Resource Block Allocation |
References
- 3GPP TR22.886. Study on Enhancement of 3GPP Support for 5G V2X Services. Technical Report (TR) 22.886, 3rd Generation Partnership Project (3GPP), 2018. Version 16.2.0. Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=3108 (accessed on 16 December 2016).
- Sakaguchi, K.; Fukatsu, R.; Yu, T.; Fukuda, E.; Mahler, K.; Heath, R.; Fujii, T.; Takahashi, K.; Khoryaev, A.; Nagata, S.; et al. Towards mmWave V2X in 5G and Beyond to Support Automated Driving. IEICE Trans. Commun. 2021, E104.B, 587–603. [Google Scholar] [CrossRef]
- Fukatsu, R.; Sakaguchi, K. Automated Driving with Cooperative Perception Using Millimeter-Wave V2V Communications for Safe Overtaking. Sensors 2021, 21, 2659. [Google Scholar] [CrossRef] [PubMed]
- 3GPP. Service Requirements for Enhanced V2X Scenarios. Technical Specification (TS) 22.186, 3rd Generation Partnership Project (3GPP), 2019. Version 16.2.0. Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=3180 (accessed on 13 March 2017).
- IEEE. P802.11-TASK GROUP BD (NGV) MEETING UPDATE. Available online: https://www.ieee802.org/11/Reports/tgbd_update.htm (accessed on 29 January 2019).
- Chen, S.; Hu, J.; Shi, Y.; Peng, Y.; Fang, J.; Zhao, R.; Zhao, L. Vehicle-to-Everything (v2x) Services Supported by LTE-Based Systems and 5G. IEEE Commun. Stand. Mag. 2017, 1, 70–76. [Google Scholar] [CrossRef]
- IEEE 802.11ad-2012. IEEE Standard for Information Technology-Telecommunications and Information Exchange between Systems-Local and Metropolitan Area Networks-Specific Requirements—Part 11: Wireless LAN Medium Access Control (MAC) and Physical Layer (PHY) Specifications Amendment 3: Enhancements for Very High Throughput in the 60 GHz Band. 2012. Available online: https://ieeexplore.ieee.org/document/6392842 (accessed on 13 March 2017).
- 3GPP TR38.885. Study on NR Vehicle-to-Everything (V2X). Technical Report (TR) 38.885, 3rd Generation Partnership Project (3GPP). 2019. Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=3497 (accessed on 27 March 2019).
- 3GPP TR38.886. V2X Services based on NR. Technical Report (TR) 38.886, 3rd Generation Partnership Project (3GPP). 2019. Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=3615 (accessed on 7 July 2020).
- Perfecto, C.; Del Ser, J.; Bennis, M. Millimeter-Wave V2V Communications: Distributed Association and Beam Alignment. IEEE J. Sel. Areas Commun. 2017, 35, 2148–2162. [Google Scholar] [CrossRef] [Green Version]
- Yang, Y.; Gao, Z.; Ma, Y.; Cao, B.; He, D. Machine learning enabling analog beam selection for concurrent transmissions in millimeter-wave V2V communications. IEEE Trans. Veh. Technol. 2020, 69, 9185–9189. [Google Scholar] [CrossRef]
- Sadovaya, Y.; Solomitckii, D.; Mao, W.; Orhan, O.; Nikopour, H.; Talwar, S.; Andreev, S.; Koucheryavy, Y. Ray-based modeling of directional millimeter-wave V2V transmissions in highway scenarios. IEEE Access 2020, 8, 54482–54493. [Google Scholar] [CrossRef]
- Yin, Y.; Chen, H.; Li, Z.; Yu, T.; Sakaguchi, K. ZigZag Antenna Configuration for MmWave V2V with Relay in Typical Road Scenarios: Design, Analysis and Experiment. IEICE Trans. Commun. 2021, E104.B, 1307–1317. [Google Scholar] [CrossRef]
- Mei, J.; Zheng, K.; Zhao, L.; Teng, Y.; Wang, X. A latency and reliability guaranteed resource allocation scheme for LTE V2V communication systems. IEEE Trans. Wirel. Commun. 2018, 17, 3850–3860. [Google Scholar] [CrossRef]
- Ashraf, M.I.; Liu, C.F.; Bennis, M.; Saad, W. Towards low-latency and ultra-reliable vehicle-to-vehicle communication. In Proceedings of the 2017 European Conference on Networks and Communications (EuCNC), Oulu, Finland, 12–15 June 2017; pp. 1–5. [Google Scholar]
- Gao, L.; Hou, Y.; Tao, X.; Zhu, M. Energy-efficient power control and resource allocation for V2V communication. In Proceedings of the 2020 IEEE Wireless Communications and Networking Conference (WCNC), Seoul, Korea, 25–28 May 2020; pp. 1–6. [Google Scholar]
- Kenney, J.B. Dedicated Short-Range Communications (DSRC) Standards in the United States. Proc. IEEE 2011, 99, 1162–1182. [Google Scholar] [CrossRef]
- Uhlemann, E. Connected-Vehicles Applications Are Emerging [Connected Vehicles]. IEEE Veh. Technol. Mag. 2016, 11, 25–96. [Google Scholar] [CrossRef]
- CARLA. Available online: https://carla.org (accessed on 27 March 2018).
- SVL. Available online: https://www.svlsimulator.com (accessed on 1 November 2018).
- Velodyne. Velodyne VLP-16 Specs. Available online: https://www.mapix.com/wp-content/uploads/2018/07/63-9229_Rev-H_Puck-_Datasheet_Web-1.pdf (accessed on 18 December 2021).
- Kazuaki, T.; Hiroyuki, M.; Takenori, S. 60 GHz Band Japanese Regulatory; Technical Specification (TS); Panasonic Corp.: Osaka, Japan, 2015. [Google Scholar]
- Electronic Communications Committee (ECC). Harmonised Use of the 63–64 GHz frequency band for Intelligent Transport Systems (ITS); Technical Specifications (ts); Electronic Communications Committee (ECC): Copenhagen, Denmark, 2016. [Google Scholar]
- Motozuka, H.; Sakamoto, T.; Wee, G.; Irie, M.; Takahashi, K.; Sadeghi, B.; Shimizu, T.; Sand, S.; Unterhuber, P. OCB for 60 GHz V2X. Technical Report IEEE 802.11-19-1162/r2, 16 September 2019. Available online: https://www.slideserve.com/bmeyer/ocb-for-60-ghz-v2x-powerpoint-ppt-presentation (accessed on 18 December 2021).
- SUMO. Available online: https://www.eclipse.org/sumo/ (accessed on 18 December 2021).
- Veins. Available online: https://veins.car2x.org (accessed on 18 December 2021).
- Kato, A.; Sato, K.; Fujise, M.; Kawakami, S. Propagation characteristics of 60-GHz millimeter waves for ITS inter-vehicle communications. IEICE Trans. Commun. 2001, 84, 2530–2539. [Google Scholar]
- Orfanidis, S.J. Electromagnetic Waves and Antennas: Radiation from Apertures. In Electromagnetic Waves and Antennas; Rutgers University: Piscataway, NJ, USA, 2016; pp. 800–843. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Width of lane () | 3.2 m |
| Length of vehicle () | 4.35 m |
| Width of vehicle () | 1.69 m |
| Height of vehicle () | 1.48 m |
| Height of metal body of vehicle () | 1.1 m |
| Chassis clearance | 0.14 m |
| Height of LiDAR () | 1.6 m |
| FOV (vertical) | 30 degrees |
| ( degrees) | |
| FOV (horizontal) | 180 degrees |
| Scan frequency (f) | 20 Hz |
| Number of bits per laser () | 28 bits |
| Number of points of vehicle’s surface () | 2615 |
| Parameters | Value |
|---|---|
| Number of RBs () | 2 |
| Carrier frequency (f) | 60 GHz |
| Height of antenna (h) | 1 m |
| MCS index | 13–24 |
| Dielectric constant of asphalt | 3.9975-j0.2 |
| Dielectric constant of concrete | 4.94-j0.69 |
| Noise figure () | 10 dB |
| Noise power density () | −174 dBm/Hz |
| Speed of Ego vehicle () | 80 km/h |
| Distance between right | 1.69 m |
| and left antennas () | |
| Variation of inter-vehicle distance | (0,100] m |
| (dBi) | (dBm) | (dBm) |
|---|---|---|
| 36 | −25 | −15 |
| 34 | −20 | −7 |
| 32 | −15 | −1 |
| 30 | −11 | 4 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yin, Y.; Yu, T.; Maruta, K.; Sakaguchi, K. Distributed and Scalable Radio Resource Management for mmWave V2V Relays towards Safe Automated Driving. Sensors 2022, 22, 93. https://doi.org/10.3390/s22010093
Yin Y, Yu T, Maruta K, Sakaguchi K. Distributed and Scalable Radio Resource Management for mmWave V2V Relays towards Safe Automated Driving. Sensors. 2022; 22(1):93. https://doi.org/10.3390/s22010093
Chicago/Turabian StyleYin, Yue, Tao Yu, Kazuki Maruta, and Kei Sakaguchi. 2022. "Distributed and Scalable Radio Resource Management for mmWave V2V Relays towards Safe Automated Driving" Sensors 22, no. 1: 93. https://doi.org/10.3390/s22010093
APA StyleYin, Y., Yu, T., Maruta, K., & Sakaguchi, K. (2022). Distributed and Scalable Radio Resource Management for mmWave V2V Relays towards Safe Automated Driving. Sensors, 22(1), 93. https://doi.org/10.3390/s22010093