
A Coordinated Vehicle–Drone Arc Routing Approach Based on Improved Adaptive Large Neighborhood Search


Abstract
:1. Introduction
- We proposed a vehicle–drone arc routing problem considering a vehicle and multiple drones (VD-ARP), and considered a more realistic scenario in which drones fly outside of the road network in addition to visiting tasks. This was rarely investigated in the past.
- To solve VD-ARP, we designed an improved, adaptive, large neighborhood search algorithm (IALNS). First, the task edges were encoded and the initial solution was generated by the “Drone-First, Vehicle-Then” heuristic method. Then, a set of problem-based neighborhood search strategies were designed. Finally, the simulated annealing mechanism, tabu table, and multiple neighborhood search strategies were embedded into the adaptive large neighborhood search framework to improve the solution. Compared with the existing heuristic methods, IALNS can be applied to larger-scale tasks, and obtain an acceptable solution in a short time.
- The effectiveness and superiority of IALNS are verified based on the experiments of instances with different scales. In addition, a case study was carried out to show that IALNS provides a satisfactory traffic patrol routing scheme in a short time.
2. Related Work
3. Problem Description
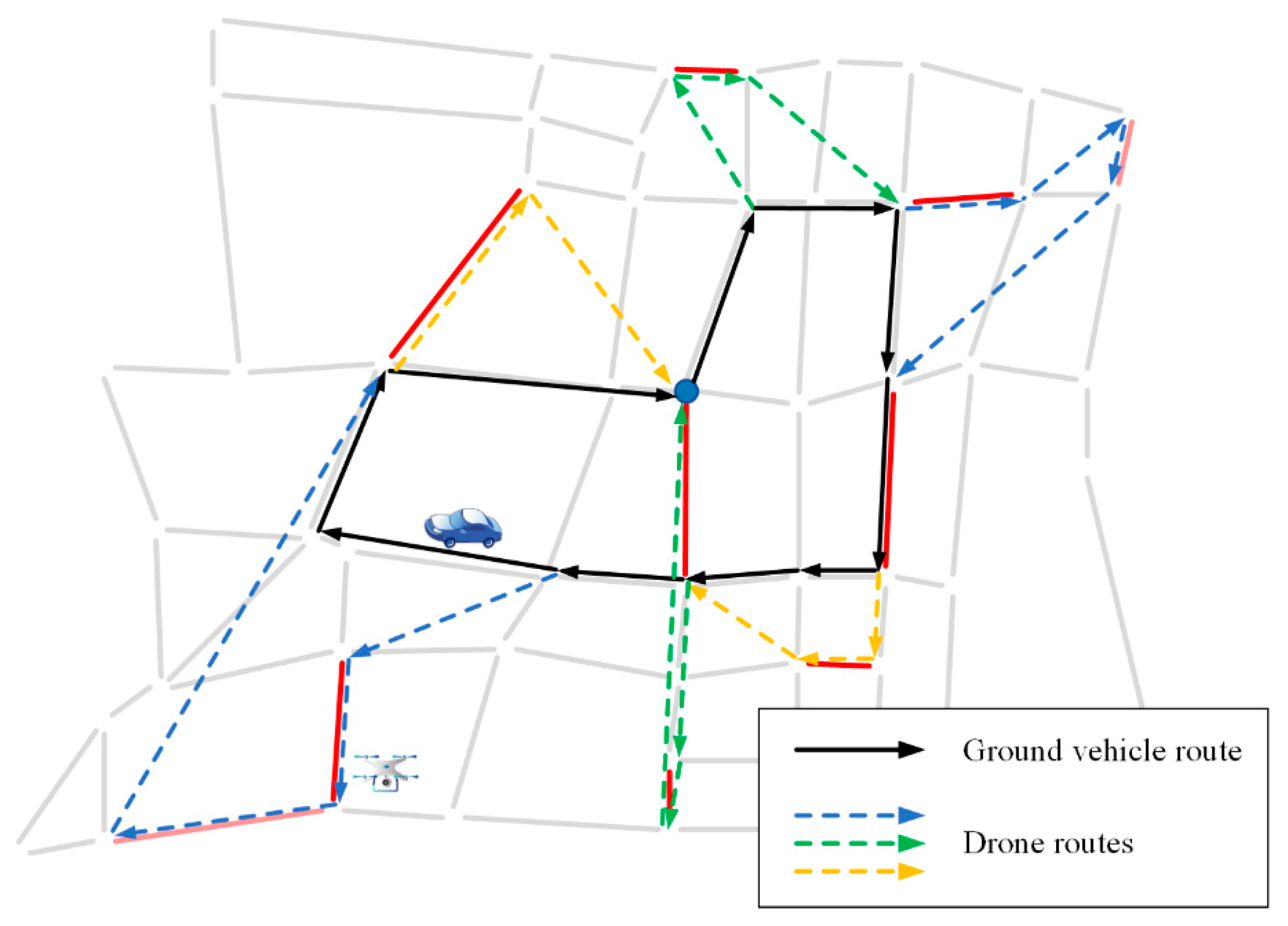
- The launch or recovery operations of a drone must be carried out at a node (intersection), and the vehicle can perform multiple launch/recovery operations at one node;
- After the vehicle launches/recovers a drone, it can wait in place, or go to another node to recover the drone or launch another drone;
- The vehicle must move along the road network, while the drone routes are not restricted by the road network;
4. Patrol Route Planning Approach
4.1. Target Edge Encoding
4.2. Initial Solution Generation
| Algorithm 1: “Drone-First, Vehicle-Then” heuristic method | |
| Input: The target edge information ; | |
| Output: Initial solution S | |
| 1 | Initialize vehicle route ; the -th drone route ; |
| 2 | GET and from |
| 3 | While do |
| 4 | If then |
| 5 | |
| 6 | Randomly select a pair of launch and recovery nodes, and determine a drone route according to the direction and access order of each target edge in the same set as |
| 7 | Delete all target edges that are in the same set as target edge from |
| 8 | Insert the launch and recovery nodes of target edge into the vehicle route according to the access order |
| 9 | Else if then |
| 10 | Insert the two endpoints of target edge into the vehicle route according to the access order |
| 11 | Delete target edge from |
| 12 | End if |
| 13 | End while |
| 14 | |
4.3. Framework of IALNS Algorithm
| Algorithm 2: Framework of IALNS | |
| Input:; ; ; ; ; ; | |
| Output: | |
| 1 | |
| 2 | Initialize; ; ; ; |
| 3 | While and do |
| 4 | Select the destroy operator and repair operator according to and |
| 5 | |
| 6 | |
| 7 | If accept then |
| 8 | |
| 9 | If then |
| 10 | |
| 11 | Else if then |
| 12 | |
| 13 | End if |
| 14 | End if |
| 15 | Update and |
| 16 | Update the tabu table |
| 17 | |
| 18 | |
| 19 | End while |
4.4. Neighborhood Search Strategies
4.4.1. Change the Access Direction of Target Edges Assigned to Drones
4.4.2. Change the Access Direction of a Target Edge Assigned to the Vehicle
4.4.3. Change the Start and End Nodes of a Drone Route
4.4.4. Delete Target Edge
4.4.5. Merge Two Drone Routes
4.4.6. Reorganize Two Drone Routes
4.4.7. Change the Assignment Object of the Target Edge
4.4.8. The Repair Operator
5. Experiments and Discussion
5.1. Simulation Setup
5.2. Experiments and Analyses
5.3. An Actual Case Study
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Lou, Y.; Yin, Y.; Lawphongpanich, S. Freeway service patrol deployment planning for incident management and congestion mitigation. Transp. Res. Part C Emerg. Technol. 2011, 19, 283–295. [Google Scholar] [CrossRef]
- Besada, J.A.; Carramiñana, D.; Bergesio, L.; Campaña, I.; Bernardos, A.M. Modelling and Simulation of Collaborative Surveillance for Unmanned Traffic Management. Sensors 2022, 22, 1498. [Google Scholar] [CrossRef] [PubMed]
- Dorling, K.; Heinrichs, J.; Messier, G.G.; Magierowski, S. Vehicle routing problems for drone delivery. IEEE Trans. Syst. Man Cybern. Syst. 2017, 47, 70–85. [Google Scholar] [CrossRef] [Green Version]
- Murray, C.C.; Chu, A.G. The flying sidekick traveling salesman problem: Optimization of drone-assisted parcel delivery. Transp. Res. Part C Emerg. Technol. 2015, 54, 86–109. [Google Scholar] [CrossRef]
- Chung, S.H.; Sah, B.; Lee, J. Optimization for drone and drone-truck combined operations: A review of the state of the art and future directions. Comput. Oper. Res. 2020, 123, 105004. [Google Scholar] [CrossRef]
- Agatz, N.; Bouman, P.; Schmidt, M. Optimization approaches for the traveling salesman problem with drone. Transp. Sci. 2018, 52, 965–981. [Google Scholar] [CrossRef]
- Tu, P.A.; Dat, N.T.; Dung, P.Q. Traveling salesman problem with multiple drones. In Proceedings of the Ninth International Symposium on Information and Communication Technology, Danang, Vietnam, 6–7 December 2018; pp. 46–53. [Google Scholar]
- Han, Y.-q.; Li, J.-q.; Liu, Z.; Liu, C.; Tian, J. Metaheuristic algorithm for solving the multi-objective vehicle routing problem with time window and drones. Int. J. Adv. Robot. Syst. 2020, 17, 1–14. [Google Scholar] [CrossRef]
- Luo, Q.; Wu, G.; Ji, B.; Wang, L.; Suganthan, P.N. Hybrid Multi-Objective Optimization Approach With Pareto Local Search for Collaborative Truck-Drone Routing Problems Considering Flexible Time Windows. IEEE Trans. Intell. Transp. Syst. 2021, 1–15. [Google Scholar] [CrossRef]
- Hu, M.; Liu, W.; Lu, J.; Fu, R.; Peng, K.; Ma, X.; Liu, J. On the joint design of routing and scheduling for Vehicle-Assisted Multi-UAV inspection. Future Gener. Comput. Syst. 2019, 94, 214–223. [Google Scholar] [CrossRef]
- Karak, A.; Abdelghany, K. The hybrid vehicle-drone routing problem for pick-up and delivery services. Transp. Res. Part C Emerg. Technol. 2019, 102, 427–449. [Google Scholar] [CrossRef]
- Poikonen, S.; Golden, B. Multi-visit drone routing problem. Comput. Oper. Res. 2020, 113, 104802. [Google Scholar] [CrossRef]
- Liu, Y.; Liu, Z.; Shi, J.; Wu, G.; Pedrycz, W. Two-echelon routing problem for parcel delivery by cooperated truck and drone. IEEE Trans. Syst. Man Cybern. Syst. 2020, 51, 7450–7465. [Google Scholar] [CrossRef]
- Peng, K.; Du, J.; Lu, F.; Sun, Q.; Dong, Y.; Zhou, P.; Hu, M. A hybrid genetic algorithm on routing and scheduling for vehicle-assisted multi-drone parcel delivery. IEEE Access 2019, 7, 49191–49200. [Google Scholar] [CrossRef]
- de Freitas, J.C.; Penna, P.H.V. A variable neighborhood search for flying sidekick traveling salesman problem. Int. Trans. Oper. Res. 2020, 27, 267–290. [Google Scholar] [CrossRef]
- Es Yurek, E.; Ozmutlu, H.C. A decomposition-based iterative optimization algorithm for traveling salesman problem with drone. Transp. Res. Part C Emerg. Technol. 2018, 91, 249–262. [Google Scholar] [CrossRef]
- Corberan, A.; Eglese, R.; Hasle, G.; Plana, I.; Sanchis, J.M. Arc routing problems: A review of the past, present, and future. Networks 2021, 77, 88–115. [Google Scholar] [CrossRef]
- Macrina, G.; Pugliese, L.D.; Guerriero, F.; Laporte, G. Drone-aided routing: A literature review. Transp. Res. Part C Emerg. Technol. 2020, 120, 25. [Google Scholar] [CrossRef]
- Liu, Y.; Shi, J.; Liu, Z.; Huang, J.; Zhou, T. Two-layer routing for high-voltage powerline inspection by cooperated ground vehicle and drone. Energies 2019, 12, 1385. [Google Scholar] [CrossRef] [Green Version]
- Luo, H.; Zhang, P.; Wang, J.; Wang, G.; Meng, F. Traffic patrolling routing problem with drones in an urban road system. Sensors 2019, 19, 5164. [Google Scholar] [CrossRef] [Green Version]
- Babić, D.; Babić, D.; Fiolić, M.; Eichberger, A.; Magosi, Z.F. Impact of Road Marking Retroreflectivity on Machine Vision in Dry Conditions: On-Road Test. Sensors 2022, 22, 1303. [Google Scholar] [CrossRef]
- Steil, D.A.; Pate, J.R.; Kraft, N.A.; Smith, R.K.; Dixon, B.; Ding, L.; Parrish, A. Patrol routing expression, execution, evaluation, and engagement. IEEE Trans. Intell. Transp. Syst. 2010, 12, 58–72. [Google Scholar] [CrossRef]
- Jalili, M.; Ozbek, M.E.; McCarthy, J.G.; Rabbani, E.R.K. Effective Performance Measures for Highway Patrol Agencies to Change Poor Driver Behaviors. Procedia Manuf. 2015, 3, 2450–2457. [Google Scholar] [CrossRef] [Green Version]
- Li, P.; Walton, J.R. Evaluating freeway service patrols in low-traffic areas using discrete-event simulation. J. Transp. Eng. 2013, 139, 1095–1104. [Google Scholar] [CrossRef]
- Chawathe, S.S. Organizing hot-spot police patrol routes. In Proceedings of the 2007 IEEE Intelligence and Security Informatics, New Brunswick, NJ, USA, 23–24 May 2007; pp. 79–86. [Google Scholar]
- Wang, Z.; He, W.; Zhang, X.; Wang, Y.; Wu, B.; Wang, Y. Lane-based vehicular speed characteristics analysis for freeway work zones using aerial videos. Can. J. Civ. Eng. 2021, 48, 274–283. [Google Scholar] [CrossRef]
- Munishkin, A.A.; Milutinovi, D.; Casbeer, D.W. Minmax time efficient inspection of ground vehicles by a UAV team. Robot. Auton. Syst. 2020, 125, 103370. [Google Scholar] [CrossRef]
- Wu, D.; Arkhipov, D.I.; Kim, M.; Talcott, C.L.; Regan, A.C.; McCann, J.A.; Venkatasubramanian, N. ADDSEN: Adaptive data processing and dissemination for drone swarms in urban sensing. IEEE Trans. Comput. 2016, 66, 183–198. [Google Scholar] [CrossRef]
- Erdös, P. Graph Theory and Probability. Can. J. Math. 1959, 11, 34–38. [Google Scholar] [CrossRef]
- Eiselt, H.A.; Gendreau, M.; Laporte, G. Arc routing problems, part I: The Chinese postman problem. Oper. Res. 1995, 43, 231–242. [Google Scholar] [CrossRef] [Green Version]
- Nilofer, M.; Rizwanullah, M. An implementation of Chinese postman problem with priorities. J. Intell. Fuzzy Syst. 2020, 38, 2979–2989. [Google Scholar] [CrossRef]
- Calogiuri, T.; Ghiani, G.; Guerriero, E.; Mansini, R. A branch-and-bound algorithm for the time-dependent rural postman problem. Comput. Oper. Res. 2019, 102, 150–157. [Google Scholar] [CrossRef]
- Monroy-Licht, M.; Amaya, C.A.; Langevin, A. Adaptive large neighborhood search algorithm for the rural postman problem with time windows. Networks 2017, 70, 44–59. [Google Scholar] [CrossRef]
- Cerrone, C.; Dussault, B.; Wang, X.; Golden, B.; Wasil, E. A two-stage solution approach for the directed rural postman problem with turn penalties. Eur. J. Oper. Res. 2019, 272, 754–765. [Google Scholar] [CrossRef]
- Xing, L.; Rohlfshagen, P.; Chen, Y.; Yao, X. An evolutionary approach to the multidepot capacitated arc routing problem. IEEE Trans. Evol. Comput. 2009, 14, 356–374. [Google Scholar] [CrossRef] [Green Version]
- Constantino, M.; Gouveia, L.; Mourao, M.C.; Nunes, A.C. The mixed capacitated arc routing problem with non-overlapping routes. Eur. J. Oper. Res. 2015, 244, 445–456. [Google Scholar] [CrossRef] [Green Version]
- Kwan, M. Programming method using odd or even pints. Acta Math. Sin. 1960, 10, 263–266. [Google Scholar]
- Lima, V.H.R.; Lima, E.D.; Sherafat, H. Routing of vehicles in the delivery/collection problems-Application of a modified Ant Colony Algorithm. Rev. Bras. Comput. Apl. 2020, 12, 44–53. [Google Scholar] [CrossRef]
- Hertz, A.; Laporte, G.; Hugo, P.N. Improvement procedures for the undirected rural postman problem. INFORMS J. Comput. 1999, 11, 53–62. [Google Scholar] [CrossRef]
- Fernandez, E.; Laporte, G.; Rodriguez-Pereira, J. A branch-and-cut algorithm for the multidepot rural postman problem. Transp. Sci. 2018, 52, 353–369. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y.; Mei, Y.; Huang, S.; Zheng, X.; Zhang, C. A Route Clustering and Search Heuristic for Large-Scale Multidepot-Capacitated Arc Routing Problem. IEEE Trans. Cybern. 2021, 1–14. [Google Scholar] [CrossRef]
- Babaee Tirkolaee, E.; Mahdavi, I.; Seyyed Esfahani, M.M.; Weber, G.-W. A hybrid augmented ant colony optimization for the multi-trip capacitated arc routing problem under fuzzy demands for urban solid waste management. Waste Manag. Res. 2020, 38, 156–172. [Google Scholar] [CrossRef]
- Oh, H.; Kim, S.; Tsourdos, A.; White, B.A. Coordinated road-network search route planning by a team of UAVs. Int. J. Syst. Sci. 2014, 45, 825–840. [Google Scholar] [CrossRef] [Green Version]
- Campbell, J.F.; Corberán, Á.; Plana, I.; Sanchis, J.M. Drone arc routing problems. Networks 2018, 72, 543–559. [Google Scholar] [CrossRef] [Green Version]
- Poikonen, S.; Campbell, J.F. Future directions in drone routing research. Networks 2021, 77, 116–126. [Google Scholar] [CrossRef]
- Danielsson, P.-E. Euclidean distance mapping. Comput. Graph. Image Processing 1980, 14, 227–248. [Google Scholar] [CrossRef] [Green Version]
- Dijkstra, E.W. A note on two problems in connexion with graphs. Numer. Math. 1959, 1, 269–271. [Google Scholar] [CrossRef] [Green Version]
- Pisinger, D.; Ropke, S. Large neighborhood search. In Handbook of Metaheuristics; Springer: Boston, MA, USA, 2010; pp. 399–419. [Google Scholar]
- Mladenović, N.; Hansen, P. Variable neighborhood search. Comput. Oper. Res. 1997, 24, 1097–1100. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| References | Research Topic | Vehicles | Drones | Objective | Task Type | Network |
|---|---|---|---|---|---|---|
| Jalili et al. [23] | Traffic safety management | M | - | - | - | Yes |
| Li et al. [24] | Evaluation system | M | - | - | - | Yes |
| Wang et al. [26] | Data analysis | M | n | - | - | Yes |
| Kwan [37] | Routing optimization | 1 | - | Cost | Arc | Yes |
| Hertz et al. [39] | Routing optimization | 1 | - | Cost | Arc | Yes |
| Babaee et al. [42] | Routing optimization | M | - | Cost | Arc | Yes |
| Campbell et al. [44] | Routing optimization | - | 1 | Cost | Arc | Yes |
| Murray et al. [4] | Routing optimization | 1 | 1 | Time | Point | No |
| Dorling et al. [3] | Routing optimization | M | n | Time/Cost | Point | No |
| Agatz et al. [6] | Routing optimization | 1 | 1 | Time | Point | Yes |
| Hu et al. [10] | Routing optimization | 1 | n | Time | Point | Yes |
| Luo et al. [20] | Routing optimization | 1 | 1 | Time | Point & Arc | Yes |
| This Work | Routing optimization | 1 | n | Time | Arc | Yes |
| Parameters | Descriptions |
|---|---|
| Matrix variable to store information of target edges | |
| Set of successively visited target edges in the i-th drone flight | |
| The j-th pair of launch and recovery nodes for the i-th target edge | |
| , with l for the launch node and r for the recovery node | |
| The time when the vehicle arrives at node i | |
| The time when the k-th drone arrives at node i | |
| The time interval required for the vehicle to wait for the recovery of the drones after arriving at the node i | |
| Vehicle speed | |
| Drone speed | |
| Maximum flight time of a drone | |
| Decision variables | Descriptions |
| if the f-th flight of the k-th drone accesses the edge eij, otherwise, | |
| if the f-th flight of the k-th drone is launched from i and recovered at j, otherwise, | |
| if the k-th drone is launched or recovered at i, otherwise, | |
| if the k-th drone has been launched at time t, otherwise, |
| Parameters | Value (Unit) |
|---|---|
| Number of drones | 3 |
| Vehicle speed | 30 km/h |
| Drone speed | 35 km/h |
| Battery life of a drone | 0.67 h |
| No. | Instances | Total Num. of Target Edges | Num. of Target Edges Only for Drones |
|---|---|---|---|
| 1 | E1-A | 5 | 1 |
| 2 | E1-B | 5 | 1 |
| 3 | E1-C | 5 | 1 |
| 4 | E2-A | 10 | 2 |
| 5 | E2-B | 10 | 2 |
| 6 | E2-C | 10 | 2 |
| 7 | E3-A | 20 | 4 |
| 8 | E3-B | 20 | 4 |
| 9 | E3-C | 20 | 4 |
| Instances | VND | VND-Tabu | ILNS | IALNS | ||||
|---|---|---|---|---|---|---|---|---|
| Result (s) | Running Time (s) | Result (s) | Running Time (s) | Result (s) | Running Time (s) | Result (s) | Running Time (s) | |
| E1-A | 2521 | 27.85 | 2452 | 27.42 | 2430 | 23.96 | 2376 | 27.92 |
| E1-B | 2751 | 21.18 | 2878 | 25.56 | 2923 | 11.42 | 2647 | 22.18 |
| E1-C | 2542 | 25.02 | 2521 | 25.93 | 2570 | 21.29 | 2466 | 27.32 |
| E2-A | 3108 | 40.16 | 3212 | 43.25 | 3086 | 37.56 | 2960 | 36.30 |
| E2-B | 3163 | 46.78 | 3153 | 47.77 | 3092 | 43.49 | 3013 | 43.78 |
| E2-C | 3079 | 38.20 | 3098 | 40.86 | 3054 | 37.47 | 3015 | 36.18 |
| E3-A | 5630 | 106.58 | 5432 | 104.03 | 5345 | 92.92 | 5108 | 90.36 |
| E3-B | 5167 | 120.09 | 5398 | 127.58 | 5081 | 105.68 | 4986 | 105.48 |
| E3-C | 5671 | 90.25 | 5817 | 96.22 | 5027 | 82.86 | 4855 | 73.58 |
| Average | 3737 | - | 3773 | - | 3623 | - | 3492 | - |
| GAP (%) | 6.56% | - | 7.45% | - | 3.62% | - | 0 | - |
| Instances | Total Num. of Target Edges | Algorithms | |||
|---|---|---|---|---|---|
| VND | VND-Tabu | ILNS | IALNS | ||
| E1-A | 5 | 0.0829 | 0.0777 | 0.0681 | 0.0770 |
| E1-B | 5 | 0.1341 | 0.0496 | 0.0519 | 0.1312 |
| E1-C | 5 | 0.0660 | 0.0551 | 0.0638 | 0.0580 |
| E2-A | 10 | 0.1399 | 0.1620 | 0.0953 | 0.0710 |
| E2-B | 10 | 0.1195 | 0.0560 | 0.0511 | 0.0514 |
| E2-C | 10 | 0.0690 | 0.0918 | 0.0542 | 0.0849 |
| E3-A | 20 | 0.1329 | 0.1663 | 0.0902 | 0.1262 |
| E3-B | 20 | 0.1938 | 0.1945 | 0.2235 | 0.0792 |
| E3-C | 20 | 0.2432 | 0.2603 | 0.2003 | 0.0643 |
| Max | 0.2432 | 0.2603 | 0.2235 | 0.1312 | |
| Min | 0.0660 | 0.0496 | 0.0511 | 0.0514 | |
| Avg | 0.1313 | 0.1237 | 0.0998 | 0.0826 | |
| Instances | Algorithms | Num. of Drones | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | ||
| E1-A | VND | 3095 | 2551 | 2438 | 2542 | 2403 | 2313 | 2345 | 2383 | 2357 |
| VND-tabu | 3057 | 2498 | 2353 | 2404 | 2326 | 2344 | 2347 | 2378 | 2350 | |
| ILNS | 3256 | 2547 | 2386 | 2544 | 2341 | 2366 | 2363 | 2356 | 2379 | |
| IALNS | 2876 | 2403 | 2287 | 2278 | 2274 | 2260 | 2288 | 2276 | 2303 | |
| E2-A | VND | 5332 | 3822 | 3319 | 3307 | 3318 | 3234 | 3256 | 2989 | 3065 |
| VND-tabu | 5194 | 3671 | 3121 | 3166 | 3011 | 3172 | 3061 | 2905 | 3173 | |
| ILNS | 5205 | 4017 | 3374 | 3460 | 3179 | 3351 | 3049 | 3259 | 3307 | |
| IALNS | 4538 | 3494 | 2952 | 3048 | 2920 | 3025 | 2885 | 2878 | 2792 | |
| E3-A | VND | 9074 | 6612 | 5186 | 5187 | 4912 | 4684 | 4306 | 4596 | 4152 |
| VND-tabu | 8599 | 6427 | 5114 | 5212 | 4731 | 4580 | 4328 | 4405 | 4471 | |
| ILNS | 9003 | 6600 | 5253 | 4917 | 4178 | 3662 | 3774 | 4062 | 3907 | |
| IALNS | 8146 | 5920 | 4853 | 4413 | 3688 | 3413 | 3518 | 3499 | 3480 | |
| Instances | Algorithms | Speed of the Vehicle | ||||||
|---|---|---|---|---|---|---|---|---|
| 30 | 35 | 40 | 45 | 50 | 55 | 60 | ||
| E1-A | VND | 2520 | 2352 | 2284 | 2203 | 2138 | 1938 | 1826 |
| VND-tabu | 2497 | 2351 | 2314 | 2292 | 2165 | 1981 | 1923 | |
| ILNS | 2571 | 2434 | 2370 | 2287 | 2244 | 2188 | 2075 | |
| IALNS | 2458 | 2331 | 2153 | 2080 | 2041 | 1914 | 1754 | |
| E2-A | VND | 3090 | 2993 | 2779 | 2647 | 2580 | 2543 | 2417 |
| VND-tabu | 3119 | 2980 | 2767 | 2654 | 2626 | 2557 | 2572 | |
| ILNS | 3145 | 3033 | 2882 | 2708 | 2554 | 2486 | 2503 | |
| IALNS | 2993 | 2862 | 2658 | 2531 | 2498 | 2421 | 2409 | |
| E3-A | VND | 5733 | 4967 | 4902 | 4596 | 4401 | 3960 | 3778 |
| VND-tabu | 5585 | 5187 | 5039 | 4527 | 4279 | 3965 | 3759 | |
| ILNS | 5423 | 4981 | 4826 | 4608 | 4297 | 3963 | 4042 | |
| IALNS | 4853 | 4786 | 4508 | 4404 | 4076 | 3861 | 3582 | |
| Algorithms | Num. of Drones | |||||
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | |
| VND | 3352 | 2777 | 2386 | 2292 | 2384 | 2441 |
| VND-tabu | 3268 | 2516 | 2353 | 2202 | 2198 | 2347 |
| ILNS | 3146 | 2391 | 2371 | 2211 | 2078 | 2294 |
| IALNS | 2980 | 2265 | 2283 | 2109 | 2002 | 2184 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, G.; Zhao, K.; Cheng, J.; Ma, M. A Coordinated Vehicle–Drone Arc Routing Approach Based on Improved Adaptive Large Neighborhood Search. Sensors 2022, 22, 3702. https://doi.org/10.3390/s22103702
Wu G, Zhao K, Cheng J, Ma M. A Coordinated Vehicle–Drone Arc Routing Approach Based on Improved Adaptive Large Neighborhood Search. Sensors. 2022; 22(10):3702. https://doi.org/10.3390/s22103702
Chicago/Turabian StyleWu, Guohua, Kexin Zhao, Jiaqi Cheng, and Manhao Ma. 2022. "A Coordinated Vehicle–Drone Arc Routing Approach Based on Improved Adaptive Large Neighborhood Search" Sensors 22, no. 10: 3702. https://doi.org/10.3390/s22103702
APA StyleWu, G., Zhao, K., Cheng, J., & Ma, M. (2022). A Coordinated Vehicle–Drone Arc Routing Approach Based on Improved Adaptive Large Neighborhood Search. Sensors, 22(10), 3702. https://doi.org/10.3390/s22103702