
Design and Locomotion Study of Two-DOF Actuator Driven by Piezoelectric–Electromagnetic Hybrid Mode


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Structure and Principle of the Proposed Actuator
3. Piezoelectric Part
3.1. Structure of the PEA
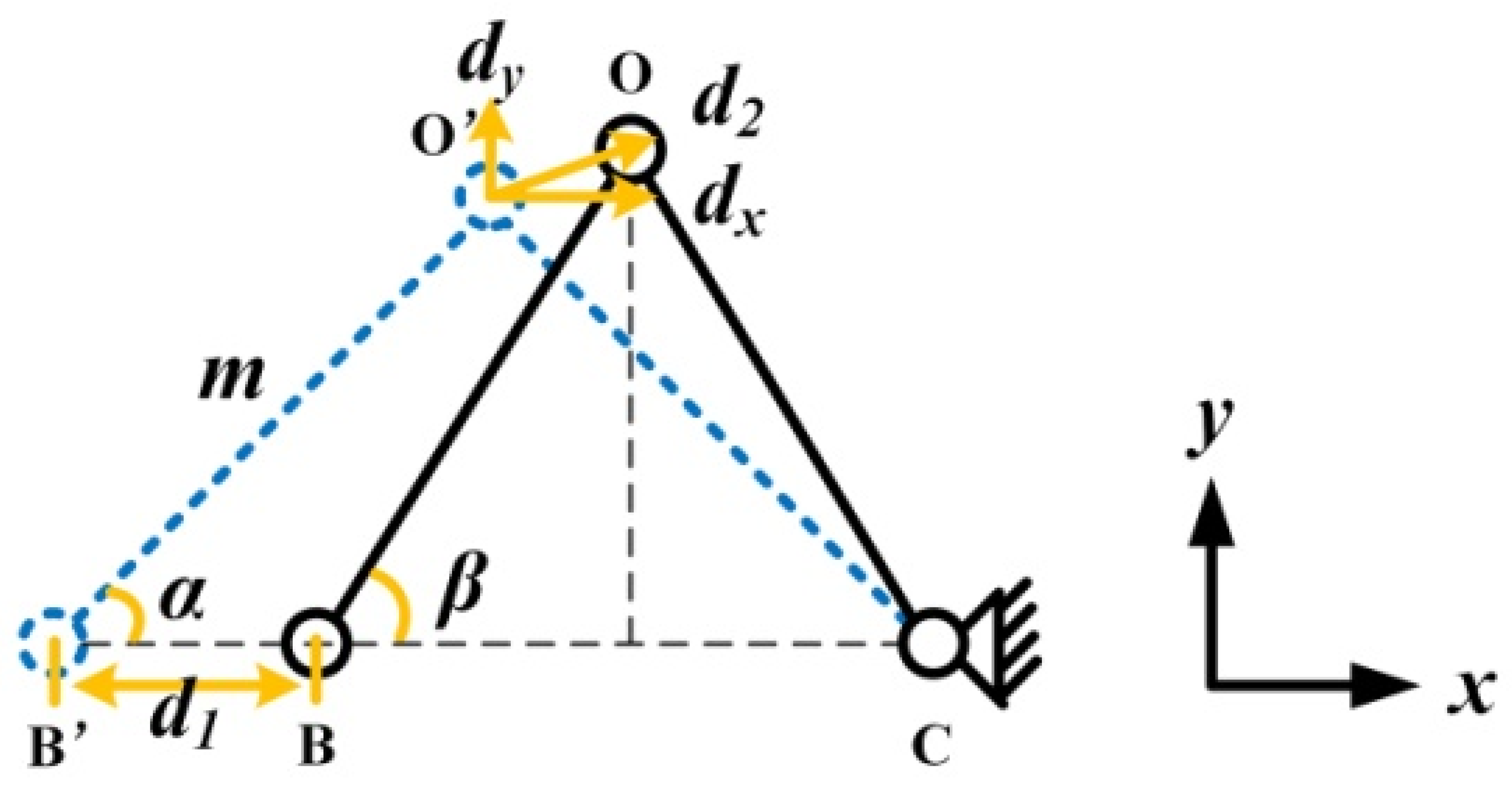
3.2. Theoretical Analysis
3.3. Analysis and Simulation of PEA
3.3.1. Dynamic Model Analysis
3.3.2. Kinematic Analysisof the PEA
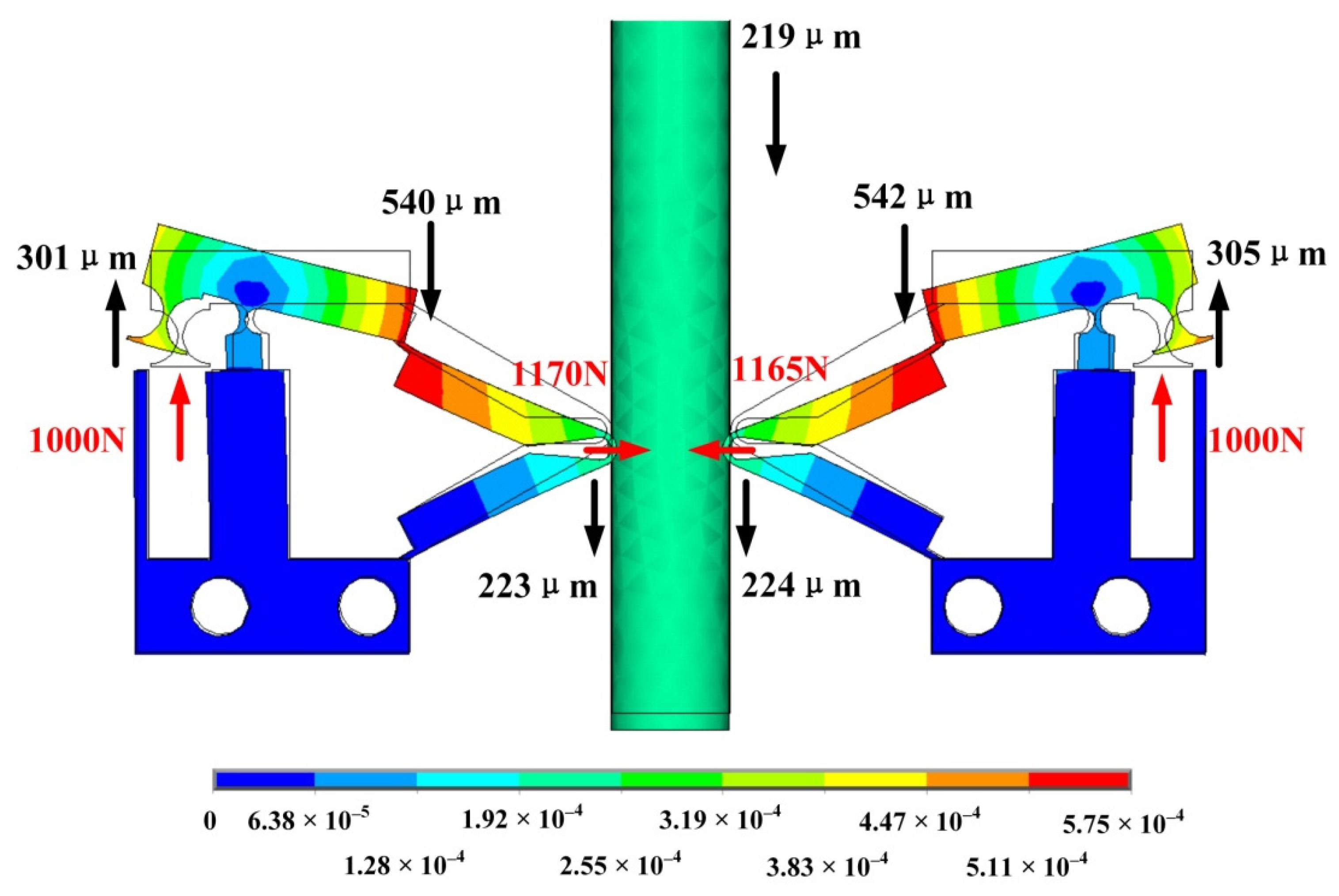
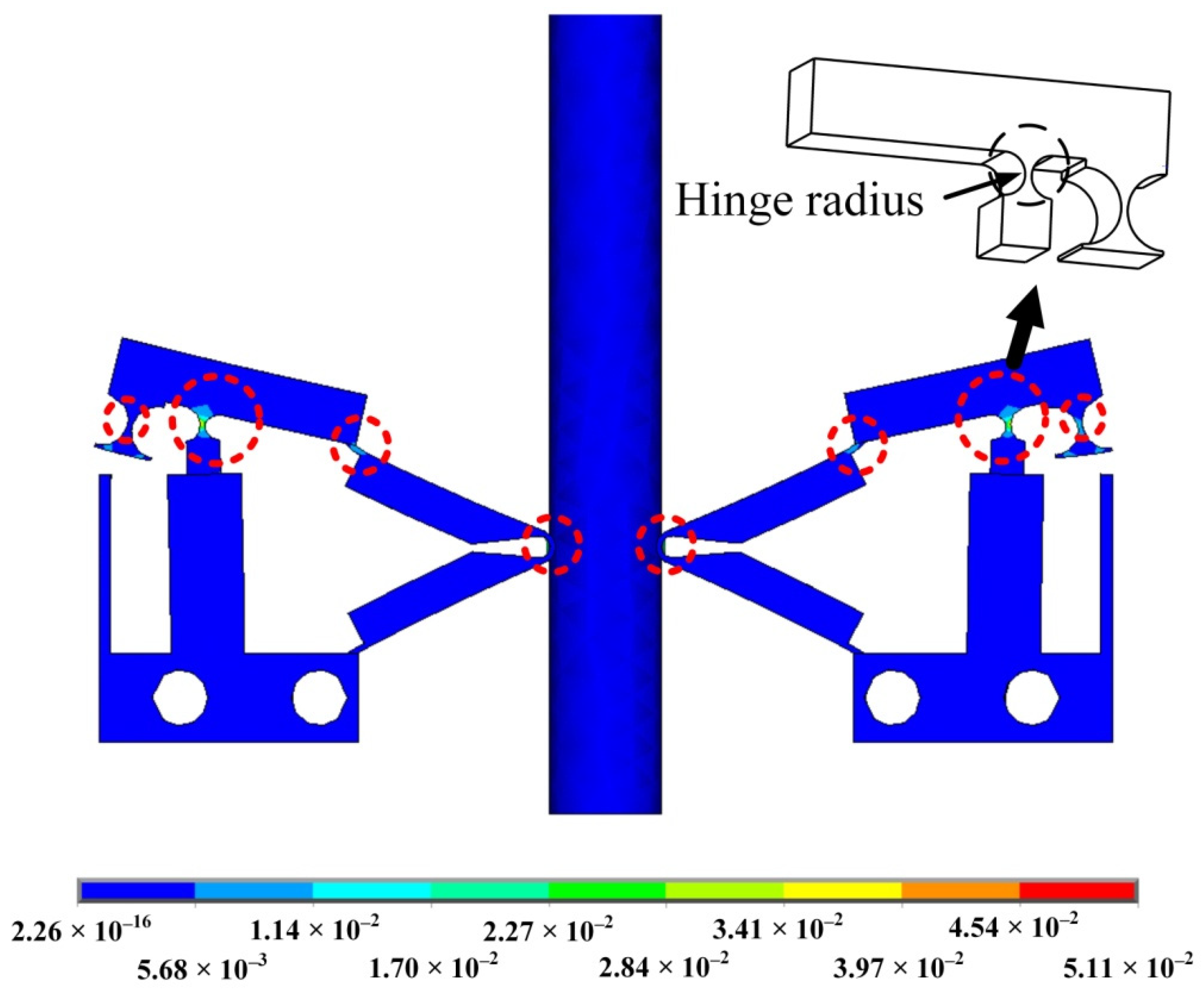
3.3.3. Force Analysis of the PEA
3.4. Simulation Analysis and Structure Optimization of the PEA
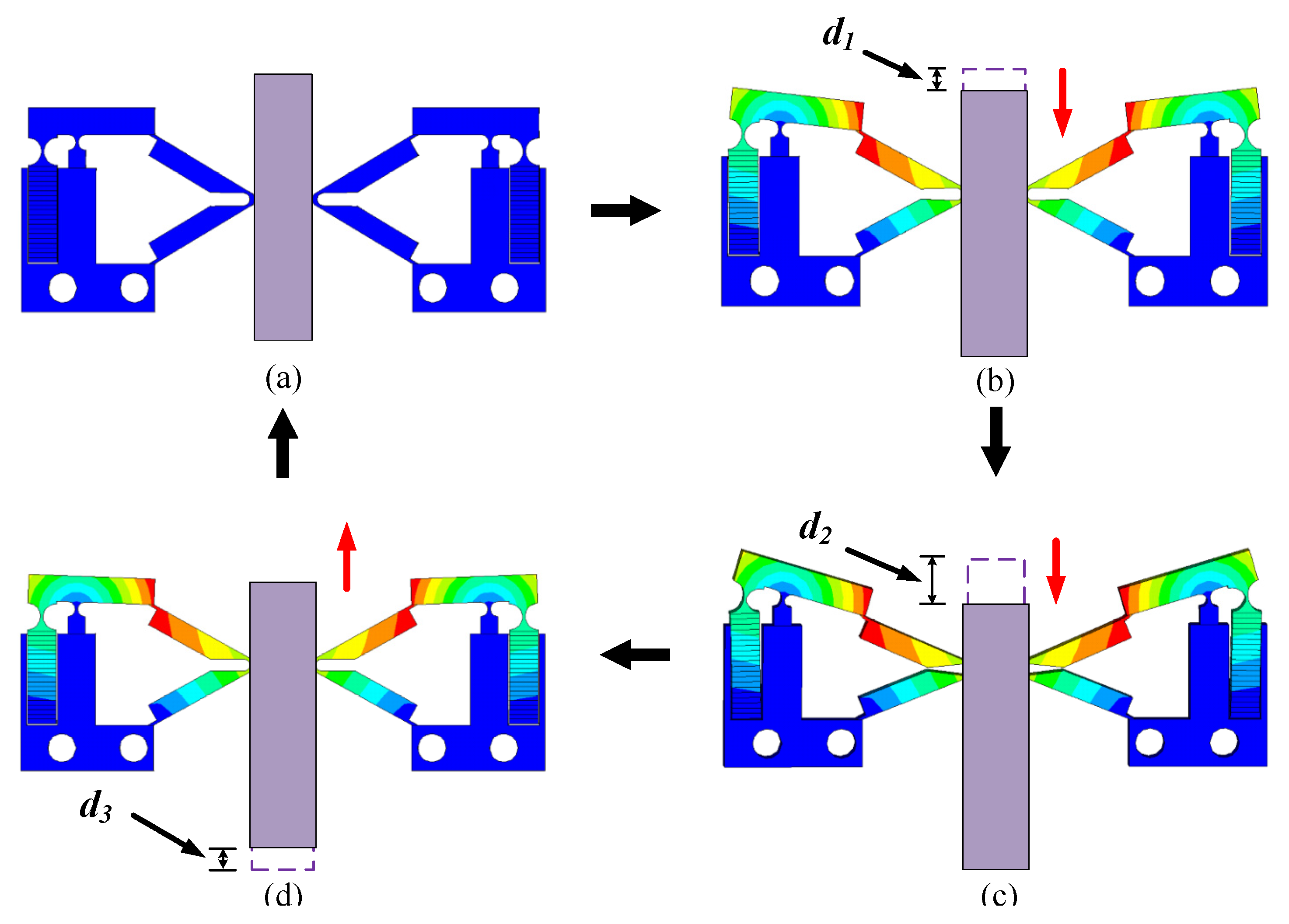
3.5. Operation Principle of the PEA
4. Electromagnetic Drive Part
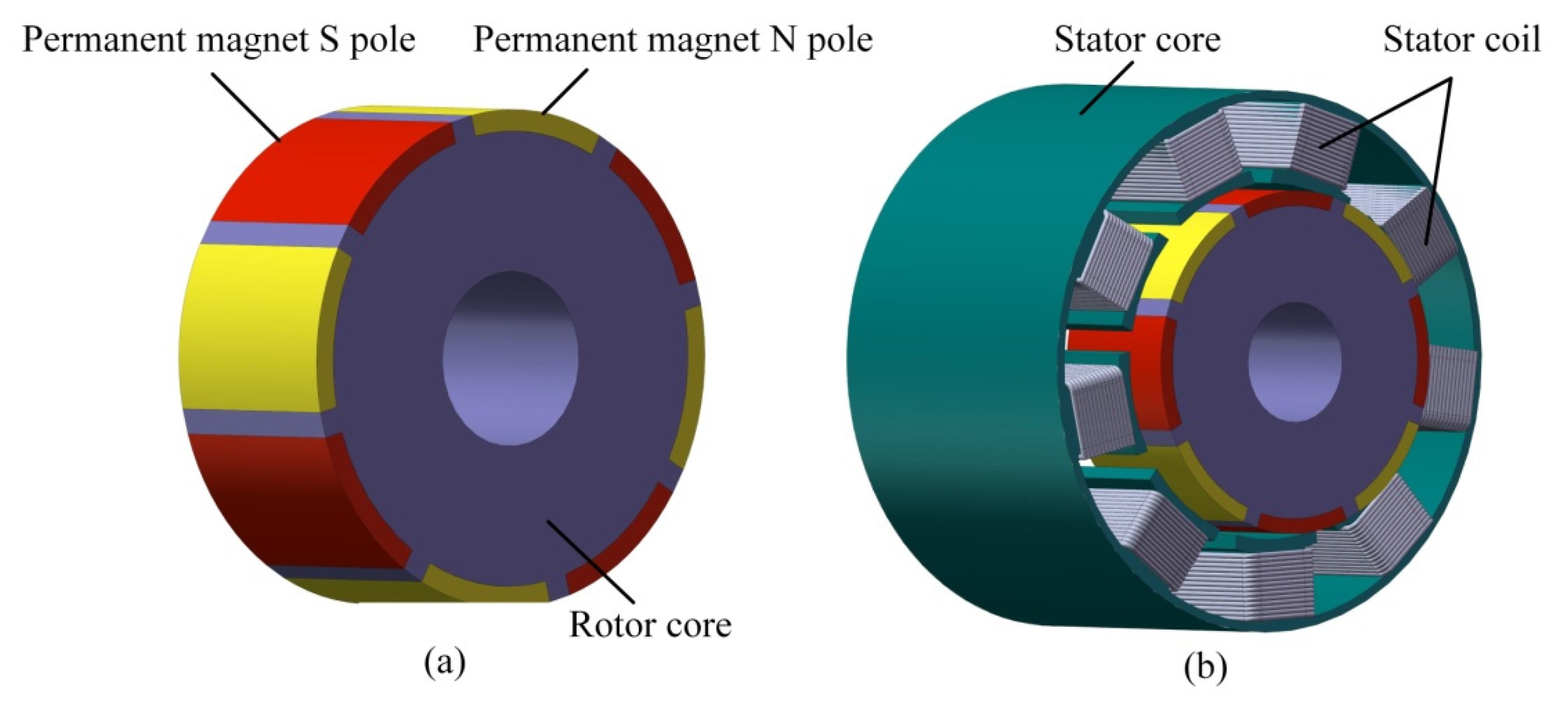
4.1. Structure of the EMA
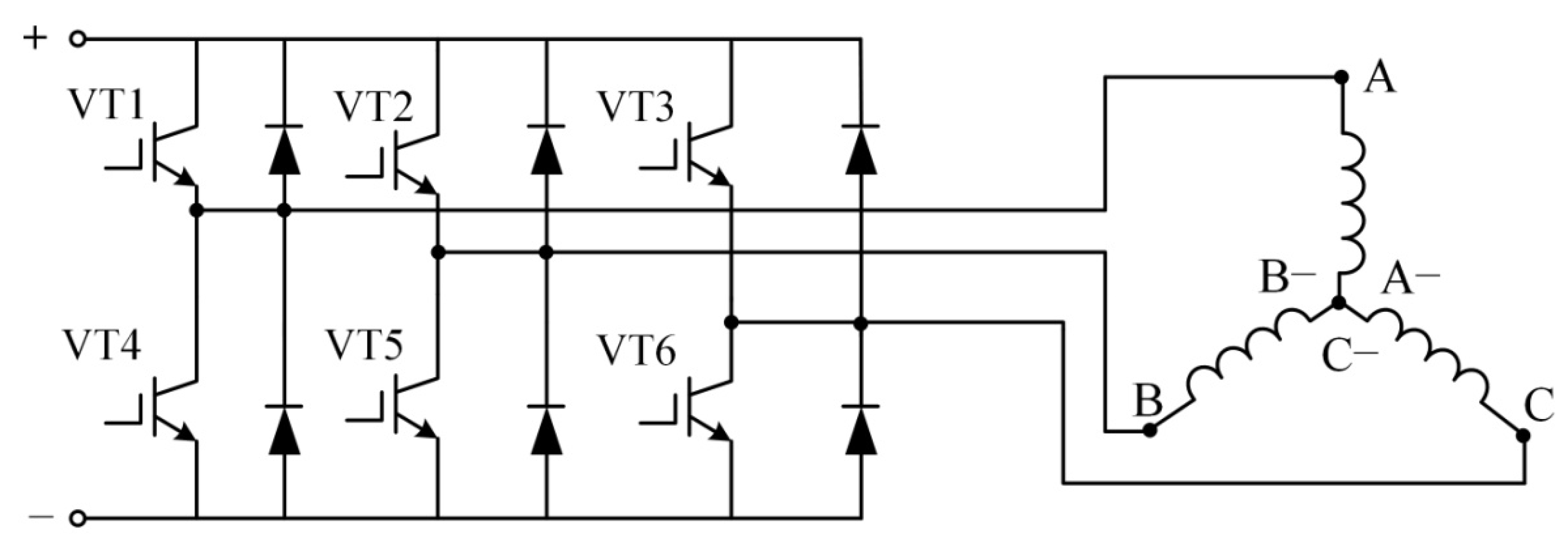
4.2. Analysis of Electromagnetic Drive
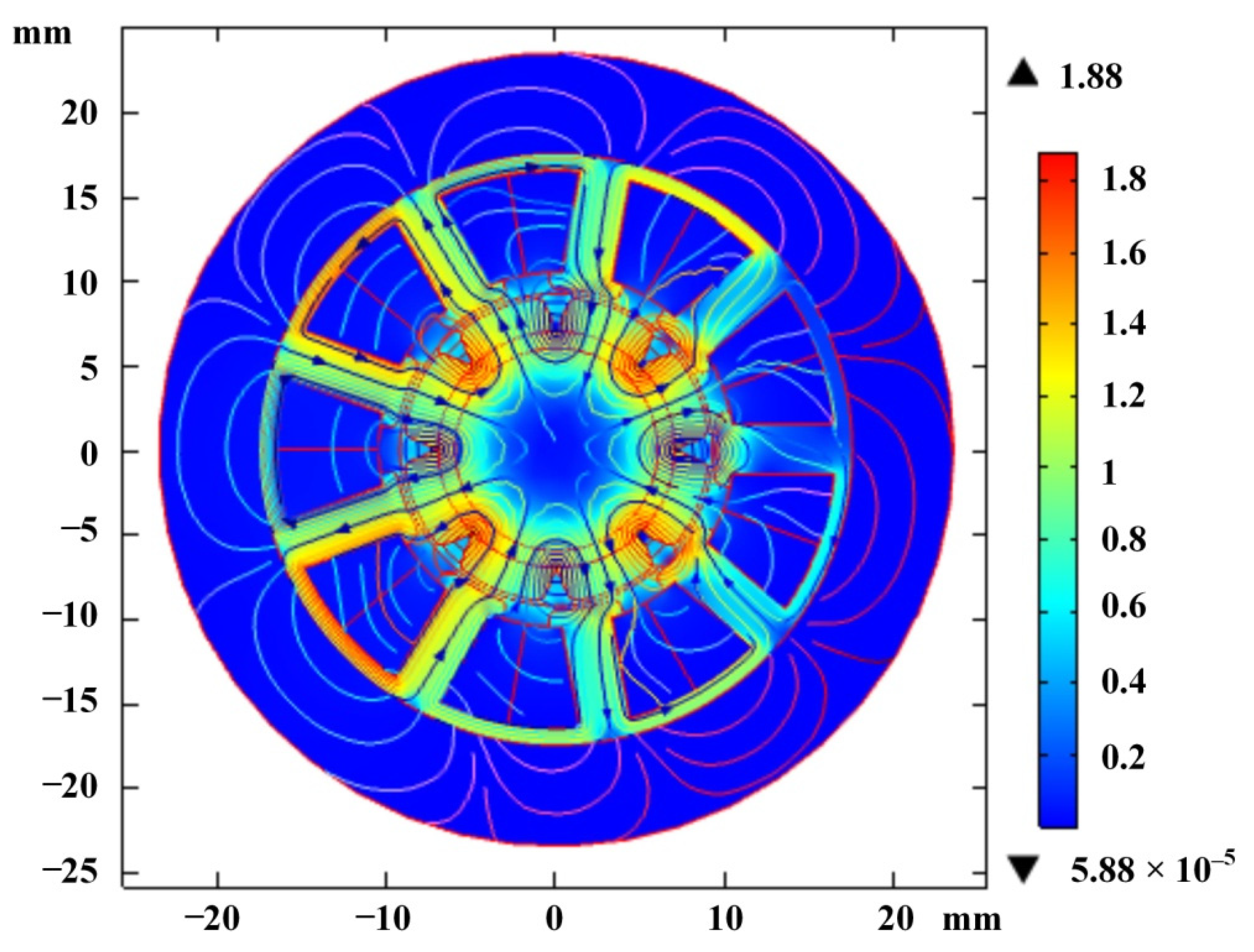
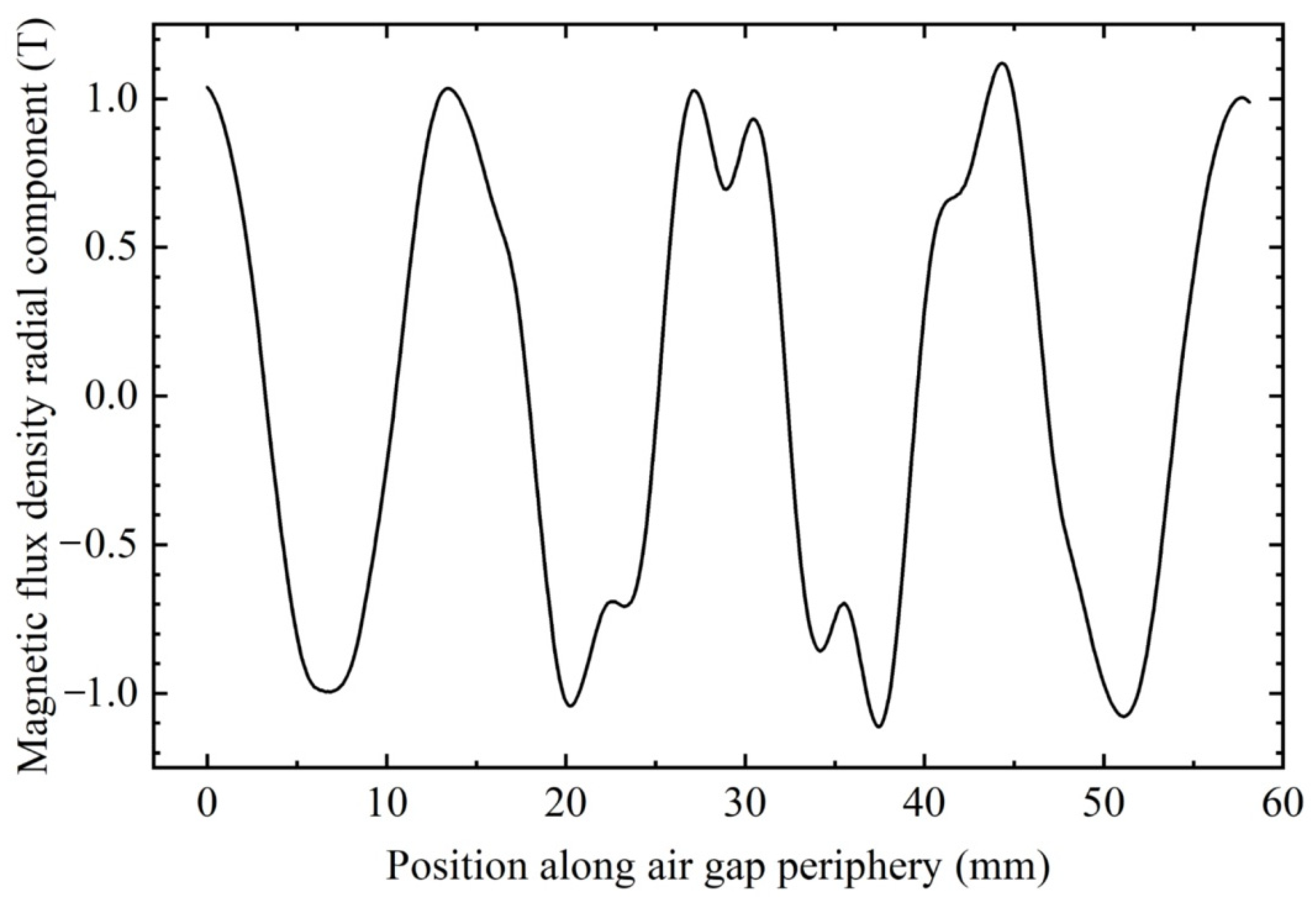
4.3. Magnetic Field Analysis in the Empty Air Gap Region
5. Experimental Analysis
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Pop, F.; Herrera, B.; Cassella, C.; Rinaldi, M. Modeling and Optimization of Directly Modulated Piezoelectric Micromachined Ultrasonic Transducers. Sensors 2021, 21, 157. [Google Scholar] [CrossRef] [PubMed]
- Jūrėnas, V.; Kazokaitis, G.; Mažeika, D. 3DOF Ultrasonic Motor with Two Piezoelectric Rings. Sensors 2020, 20, 834. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ryndzionek, R.; Sienkiewicz, Ł.; Michna, M.; Kutt, F. Design and Experiments of a Piezoelectric Motor Using Three Rotating Mode Actuators. Sensors 2019, 19, 5184. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Cai, J.; Chen, F.; Gao, Y.; Dong, W. Hybrid controller of a linear piezoelectric walking stage relying on stack/shear piezoelectric actuators. Precis. Eng. 2021, 72, 272–281. [Google Scholar] [CrossRef]
- Al-agele, H.A.; Jashami, H.; Higgins, C.W. Evaluation of novel ultrasonic sensor actuated nozzle in center pivot irrigation systems. Agric. Water Manag. 2022, 262, 107436. [Google Scholar] [CrossRef]
- Li, Z.; Wang, Z.; Zhao, L.; Guo, P. Characteristic Analysis and Experimental Study of Spherical Ultrasonic Motor with Multi-degree-of-freedom. J. Appl. Sci. Eng. 2020, 23, 619–626. [Google Scholar] [CrossRef]
- Yayli, M.Ö. Buckling analysis of a cantilever single-walled carbon nanotube embedded in an elastic medium with an attached spring. Micro Nano Lett. 2017, 12, 255–259. [Google Scholar] [CrossRef]
- Turner, A.; Ramsay, K.; Clark, R.; Howe, D. Direct-Drive Rotary-Linear Electromechanical Actuation System for Control of Gearshifts in Automated Transmissions. In Proceedings of the 2007 IEEE Vehicle Power and Propulsion Conference, Arlington, TX, USA, 9–12 September 2007; pp. 267–272. [Google Scholar]
- Wang, Y.; Wang, L. Design, fabricate, and experimental verification of an ultrasonic linear motor derived from V-type motors. Rev. Sci. Instrum. 2020, 91, 045002. [Google Scholar] [CrossRef]
- Huang, Z.; Shi, S.; Chen, W.; Wang, L.; Wu, L.; Liu, Y. Development of a novel spherical stator multi-DOF ultrasonic motor using in-plane non-axisymmetric mode. Mech. Syst. Signal Processing 2020, 140, 106658. [Google Scholar] [CrossRef]
- Lu, D.; Lin, Q.; Chen, B.; Jiang, C.; Hu, X. A single-modal linear ultrasonic motor based on multi vibration modes of PZT ceramics. Ultrasonics 2020, 107, 106158. [Google Scholar] [CrossRef]
- Yang, L.; Ren, W.; Ma, C.; Chen, L. Mechanical simulation and contact analysis of the hybrid longitudinal-torsional ultrasonic motor. Ultrasonics 2020, 100, 105982. [Google Scholar] [CrossRef] [PubMed]
- Li, Z.; Wang, Z.; Han, H.; Sun, H. Analysis of impedance matching for a spherical multi-degree-of-freedom ultrasonic motor. Rev. Sci. Instrum. 2021, 92, 025004. [Google Scholar] [CrossRef] [PubMed]
- Lu, X.; Gao, Q.; Li, Y.; Yu, Y.; Zhang, X.; Qiao, G.; Cheng, T. A Linear Piezoelectric Stick-Slip Actuator via Triangular Displacement Amplification Mechanism. IEEE Access 2020, 8, 6515–6522. [Google Scholar] [CrossRef]
- Gao, Q.; Li, Y.; Lu, X.; Zhang, C.; Zhang, X.; Cheng, T. A piezoelectric stick-slip linear actuator with a rhombus-type flexure hinge mechanism by means of parasitic motion. Rev. Sci. Instrum. 2019, 90, 096102. [Google Scholar] [CrossRef]
- Li, H.; Li, Y.; Cheng, T.; Lu, X.; Zhao, H.; Gao, H. A Symmetrical Hybrid Driving Waveform for a Linear Piezoelectric Stick-Slip Actuator. IEEE Access 2017, 5, 16885–16894. [Google Scholar] [CrossRef]
- Yang, X.; Zhang, D.; Song, R.; Yang, C.; Mu, Z. Development of a Rotary Ultrasonic Motor with Double-Sided Staggered Teeth. Micromachines 2021, 12, 824. [Google Scholar] [CrossRef]
- Liu, Y.; Yan, J.; Wang, L.; Chen, W. A Two-DOF Ultrasonic Motor Using a Longitudinal-Bending Hybrid Sandwich Transducer. IEEE Trans. Ind. Electron. 2018, 66, 3041–3050. [Google Scholar] [CrossRef]
- Liu, Y.; Deng, J.; Su, Q. Review on Multi-Degree-of-Freedom Piezoelectric Motion Stage. IEEE Access 2018, 6, 59986–60004. [Google Scholar] [CrossRef]
- Li, J.; Huang, h.; Morita, T. Stepping Piezoelectric Actuators with Large Working Stroke for Nano-positioning Systems: A Review. Sens. Actuators A Phys. 2019, 292, 39–51. [Google Scholar] [CrossRef]
- Yu, H.; Liu, Y.; Deng, J.; Zhang, S. A Novel Piezoelectric Stack for Rotary Motion by d15 Working Mode: Principle, Modeling, Simulation, and Experiments. IEEE/ASME Trans. Mechatron. 2020, 25, 491–501. [Google Scholar] [CrossRef]
- Wang, L.; Quan, Q.; Xue, K.; Li, H. Development of a three-DOF piezoelectric actuator using a thin cross-beam vibrator. Int. J. Mech. Sci. 2018, 149, 54–61. [Google Scholar] [CrossRef]
- Liu, Y.; Chen, W.; Shi, D.; Tian, X.; Shi, S.; Xu, D. Development of a Four-Feet Driving Type Linear Piezoelectric Actuator Using Bolt-Clamped Transducers. IEEE Access 2017, 5, 27162–27171. [Google Scholar] [CrossRef]
- Zhang, B.; Yao, Z.; Liu, Z.; Li, X. A novel L-shaped linear ultrasonic motor operating in a single resonance mode. Rev. Sci. Instrum. 2018, 89, 015006. [Google Scholar] [CrossRef]
- Pan, Q.; Hu, J.; Miao, E.; Chen, S.; Shu, S.; Hu, P.; Huang, B. Novel piezoelectric rotary motor driven by a single-phase sine wave with an asymmetric stator. Rev. Sci. Instrum. 2019, 90, 075006. [Google Scholar] [CrossRef] [PubMed]
- Li, Z.; Zhao, L.; Guo, P.; Wang, Z. Electromagnetic piezoelectric hybrid driven multi-DOF motor contact model considering drive and load state. Sci. Prog. 2021, 104, 003685042110023. [Google Scholar] [CrossRef] [PubMed]
- Shao, S.; Song, S.; Shao, Y.; Xu, M. Long-range piezoelectric actuator with large load capacity using inchworm and stick-slip driving principles. Precis. Eng. 2022, 75, 167–179. [Google Scholar] [CrossRef]
- Li, J.; Liu, H.; Zhao, H. A Compact 2-DOF Piezoelectric-Driven Platform Based on “Z-Shaped” Flexure Hinges; Micromachines: Changchun, China, 2017; Volume 8. [Google Scholar] [CrossRef] [Green Version]
- Wang, L.; Chen, W.; Liu, J.; Deng, J.; Liu, Y. A review of recent studies on non-resonant piezoelectric actuators. Mech. Syst. Signal Processing 2019, 133, 106254. [Google Scholar] [CrossRef]
- Dong, X.; Yang, Y.; Zhang, C.; Shan, X. A Novel Self-Sensing Stacking Piezoelectric Actuator Based on Structural Integration. In Proceedings of the 2018 5th International Conference on Information Science and Control Engineering (ICISCE), Zhengzhou, China, 20–22 July 2018; pp. 632–635. [Google Scholar]
- Liu, Z.; Wang, H.; Yang, P.; Dong, Z.; Zhang, L. Dynamic modeling and analysis of bundled linear ultrasonic motors with non-ideal driving. Ultrasonics 2022, 124, 106717. [Google Scholar] [CrossRef]
- Gao, Y.; Wen, J.; Ma, J.; Zhang, Y.; Wang, R.; Hu, Y.; Li, J. A self-adapting linear inchworm piezoelectric actuator based on a permanent magnets clamping structure. Mech. Syst. Signal Process. 2019, 132, 429–440. [Google Scholar] [CrossRef]
- Wang, J.; Li, J.; Xu, Z.; Wang, S.; Wang, Z.; Xu, B.; Sun, Y.; Liu, S.; Zhao, H. Design, analysis, experiments and kinetic model of a high step efficiency piezoelectric actuator. Mechatronics 2019, 59, 61–68. [Google Scholar] [CrossRef]
- Zhang, Y.; Peng, Y.; Sun, Z.; Yu, H. A Novel Stick–Slip Piezoelectric Actuator Based on a Triangular Compliant Driving Mechanism. IEEE Trans. Ind. Electron. 2019, 66, 5374–5382. [Google Scholar] [CrossRef]














Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Z.; Su, Z.; Wang, H.; Du, S.; Sun, H. Design and Locomotion Study of Two-DOF Actuator Driven by Piezoelectric–Electromagnetic Hybrid Mode. Sensors 2022, 22, 3739. https://doi.org/10.3390/s22103739
Li Z, Su Z, Wang H, Du S, Sun H. Design and Locomotion Study of Two-DOF Actuator Driven by Piezoelectric–Electromagnetic Hybrid Mode. Sensors. 2022; 22(10):3739. https://doi.org/10.3390/s22103739
Chicago/Turabian StyleLi, Zheng, Zhirong Su, Haibo Wang, Shenhui Du, and Hexu Sun. 2022. "Design and Locomotion Study of Two-DOF Actuator Driven by Piezoelectric–Electromagnetic Hybrid Mode" Sensors 22, no. 10: 3739. https://doi.org/10.3390/s22103739
APA StyleLi, Z., Su, Z., Wang, H., Du, S., & Sun, H. (2022). Design and Locomotion Study of Two-DOF Actuator Driven by Piezoelectric–Electromagnetic Hybrid Mode. Sensors, 22(10), 3739. https://doi.org/10.3390/s22103739