
Advanced Fault-Tolerant Anti-Surge Control System of Centrifugal Compressors for Sensor and Actuator Faults

 , , , , and
, , , , and
Abstract
:1. Introduction
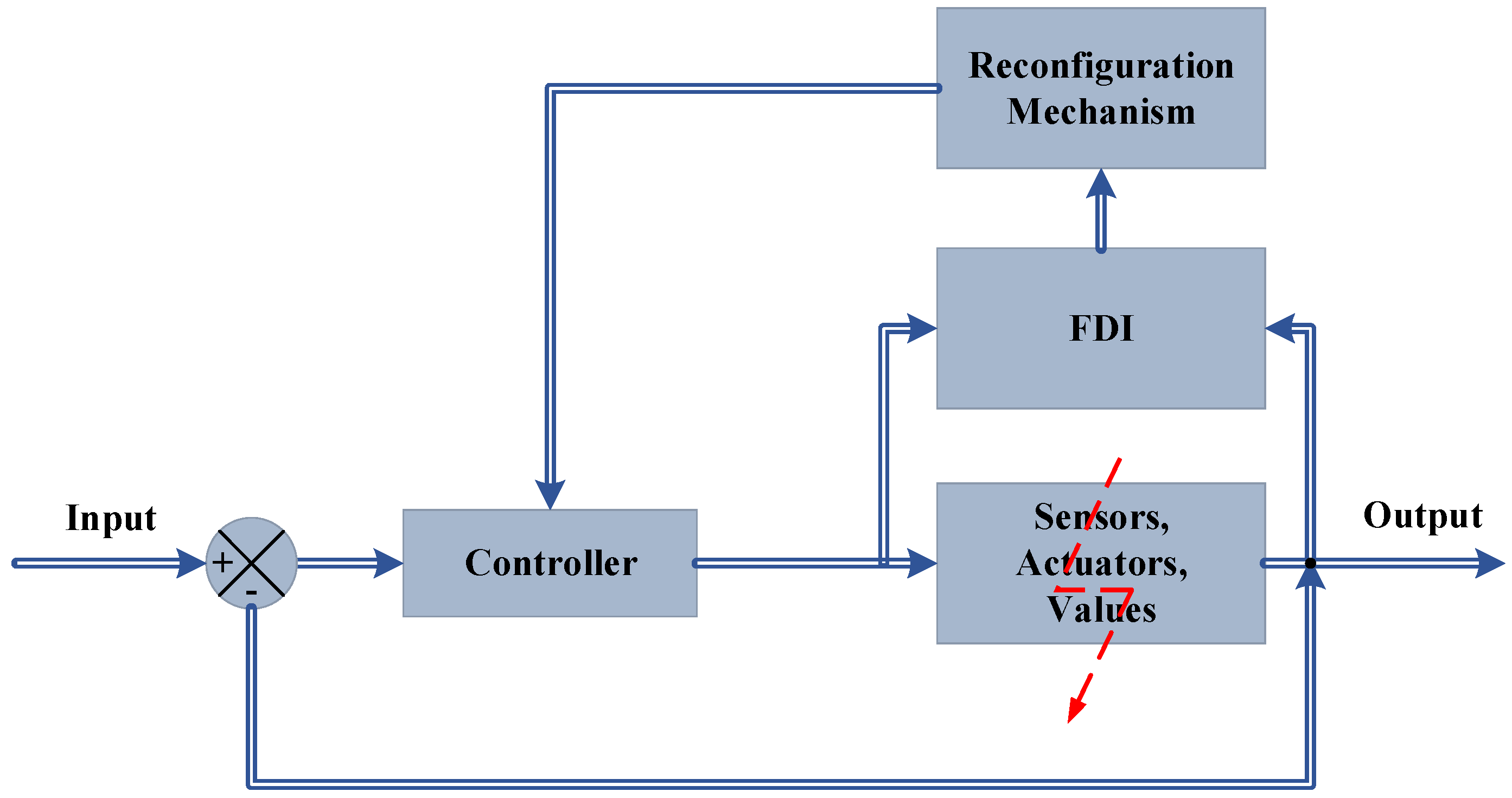
1.1. Fault-Tolerant Control Systems
1.2. Types of Fault-Tolerant Control Systems
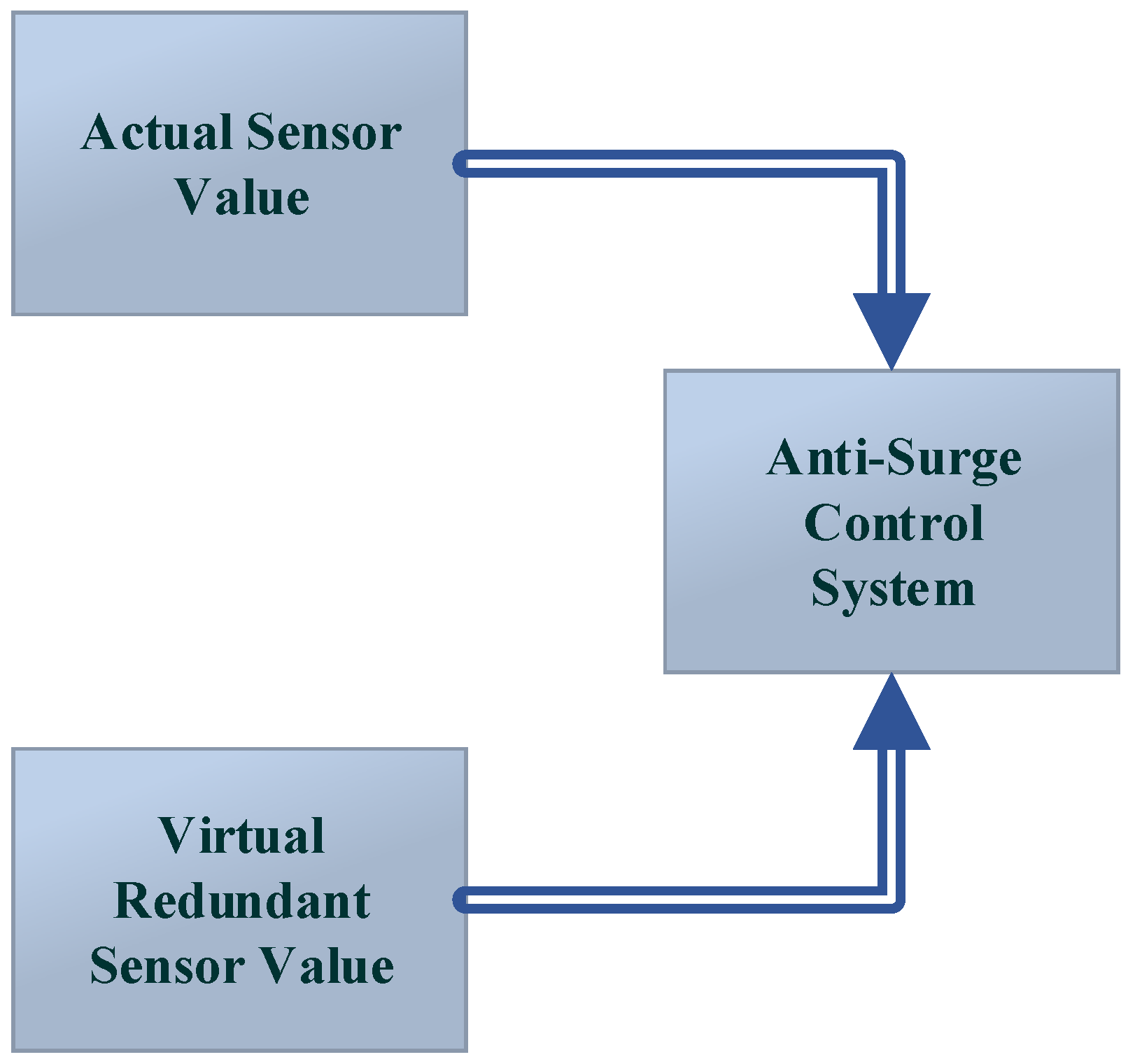
1.3. Analytical and Hardware Redundancy
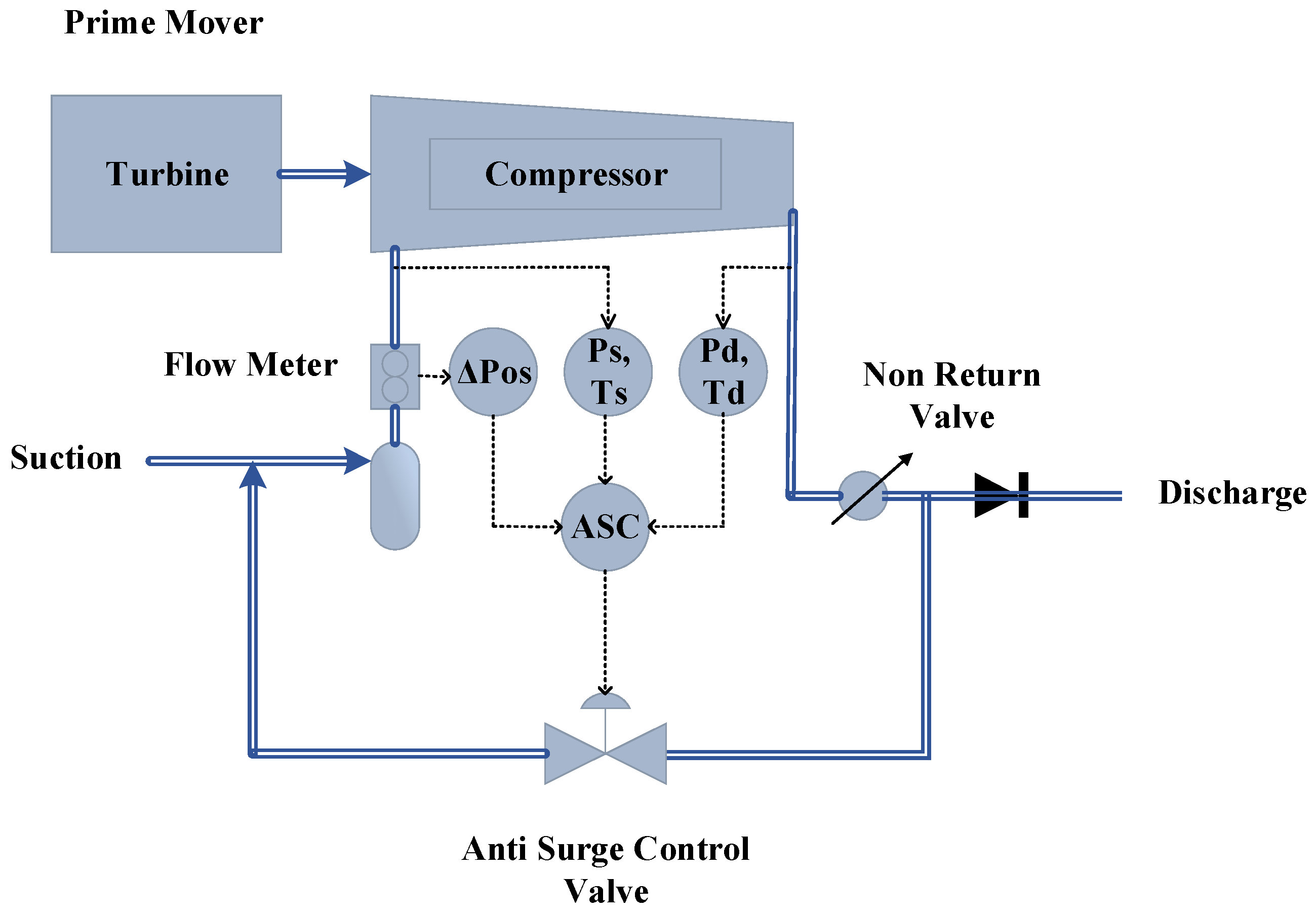
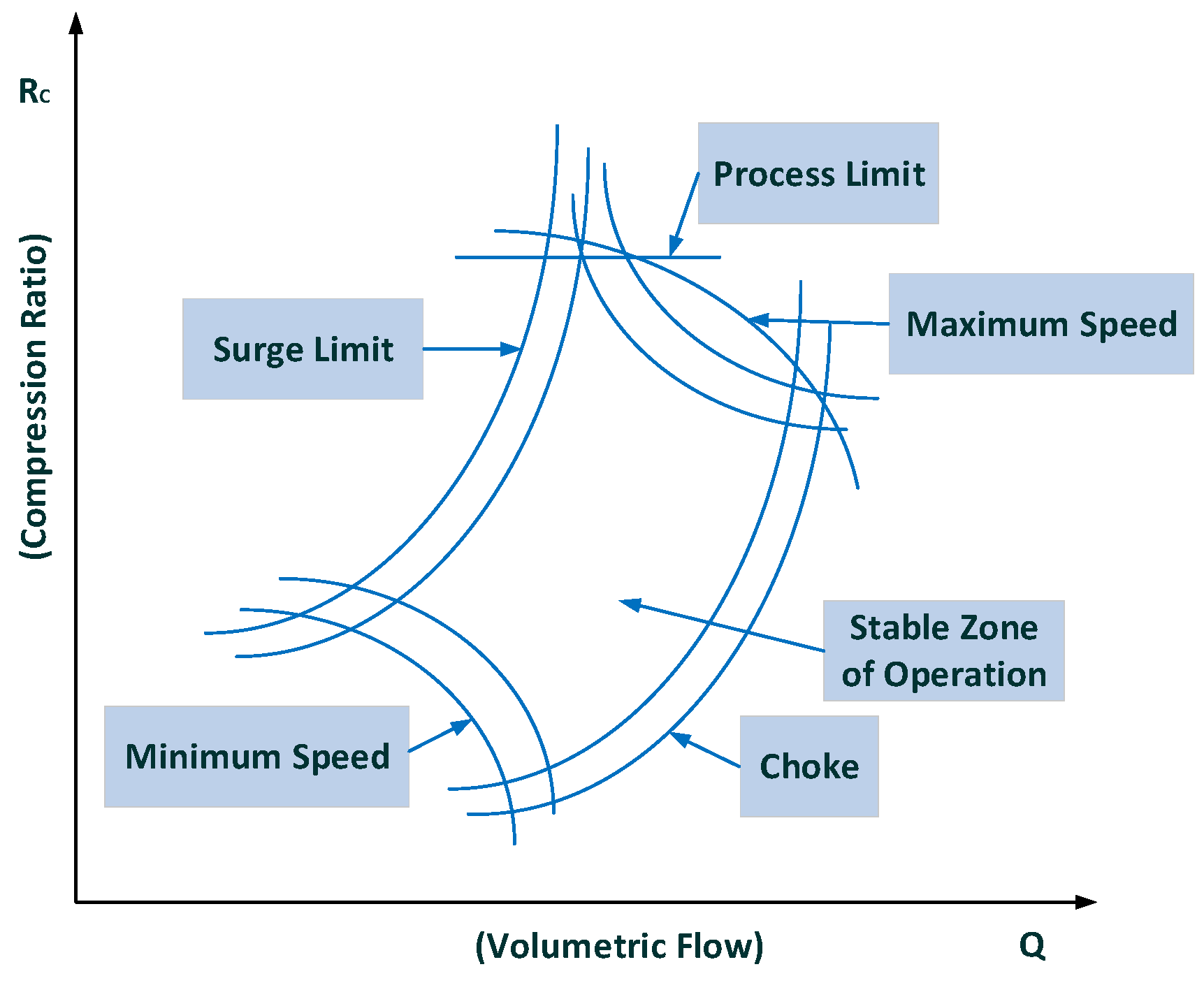
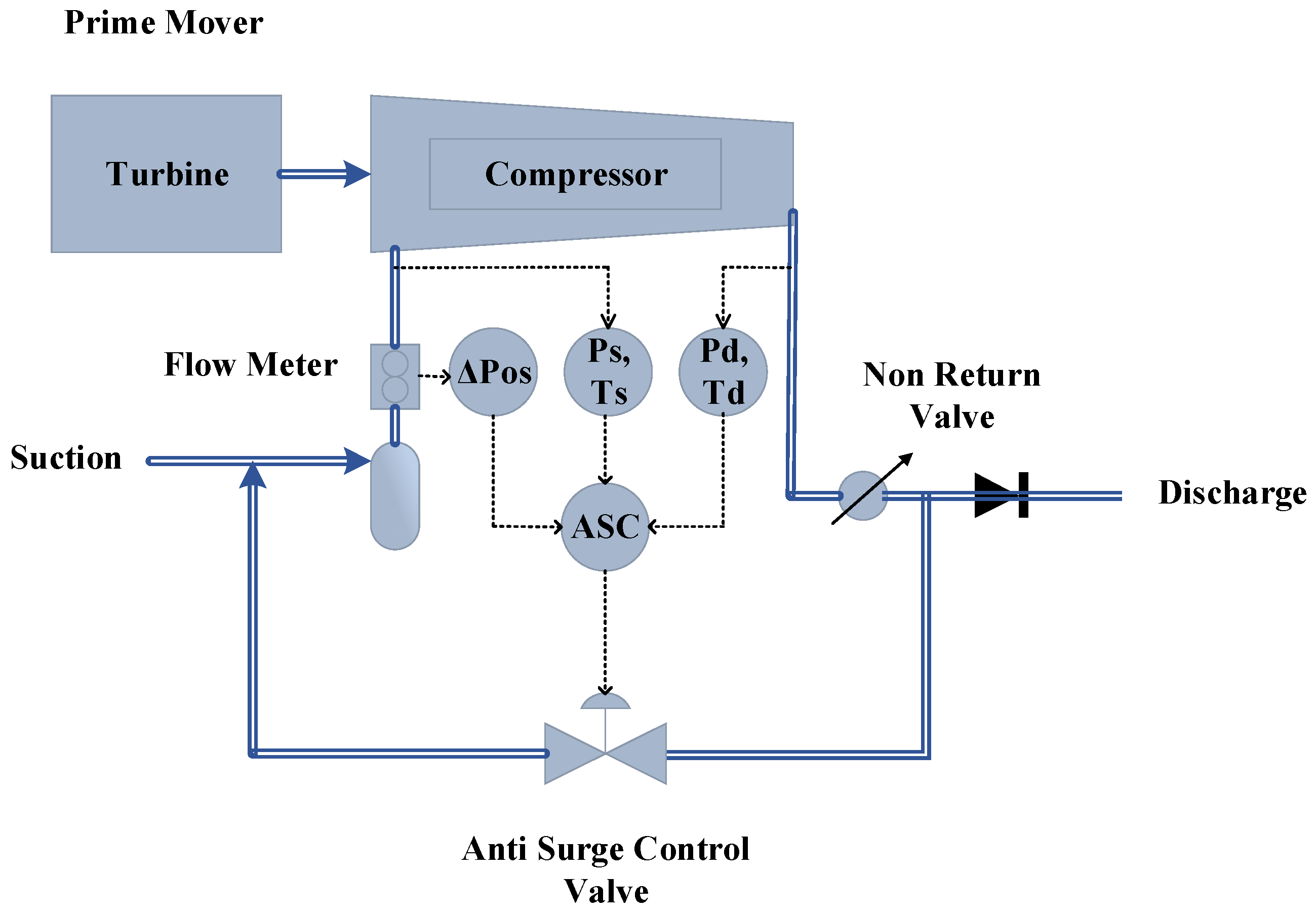
1.4. Compressor Control System
1.5. Faults in the Compressor Control System
2. Research Methodology
2.1. Implementation of AFTCS
2.2. HYSYS Model for Centrifugal Compressor
3. Results and Discussion
3.1. Fault Tolerance in Suction Pressure
3.2. Fault Tolerance in Discharge Pressure Sensor
3.3. Fault Tolerance in Suction Temperature Sensor
3.4. Fault Tolerance in Discharge Temperature Sensor
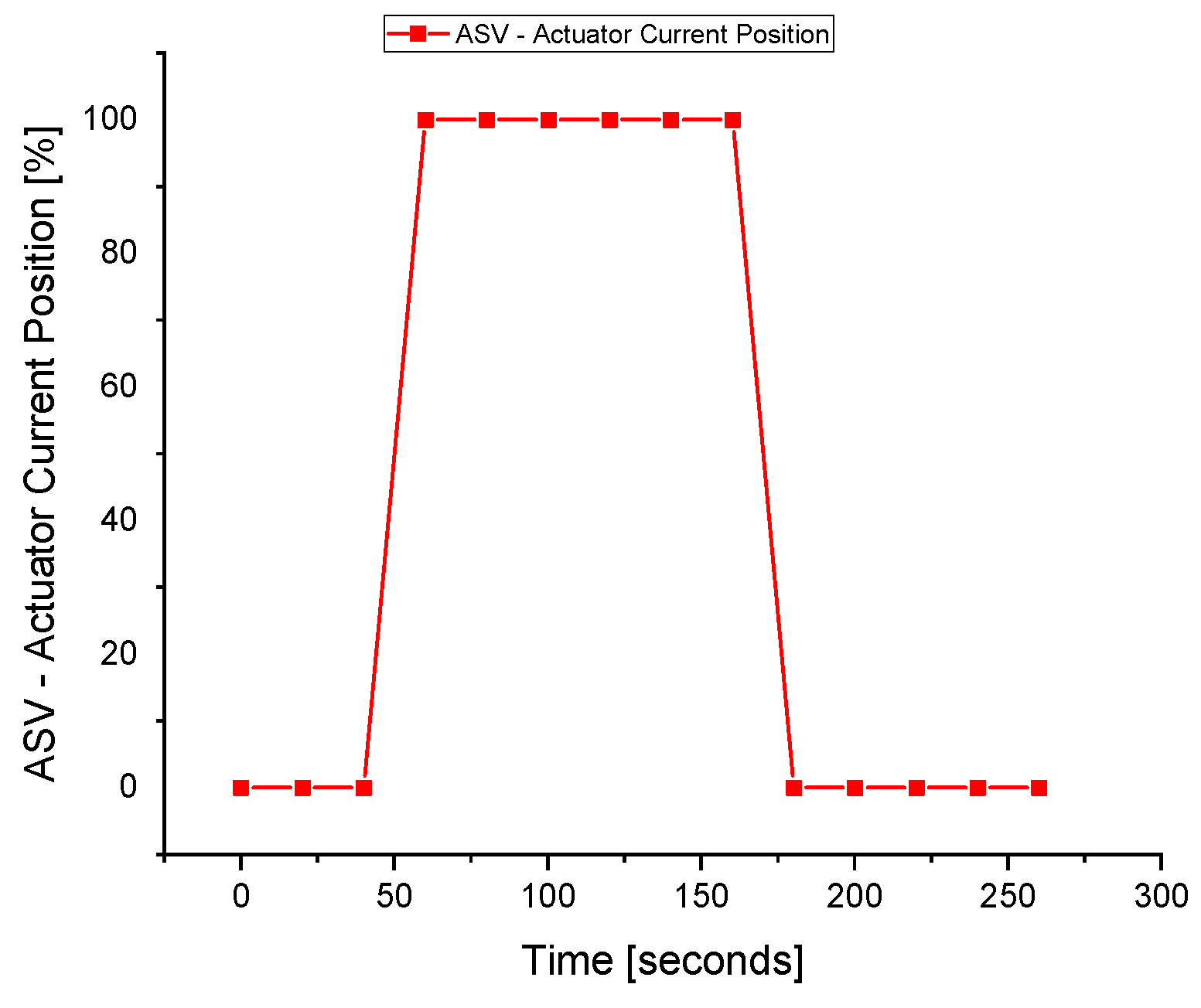
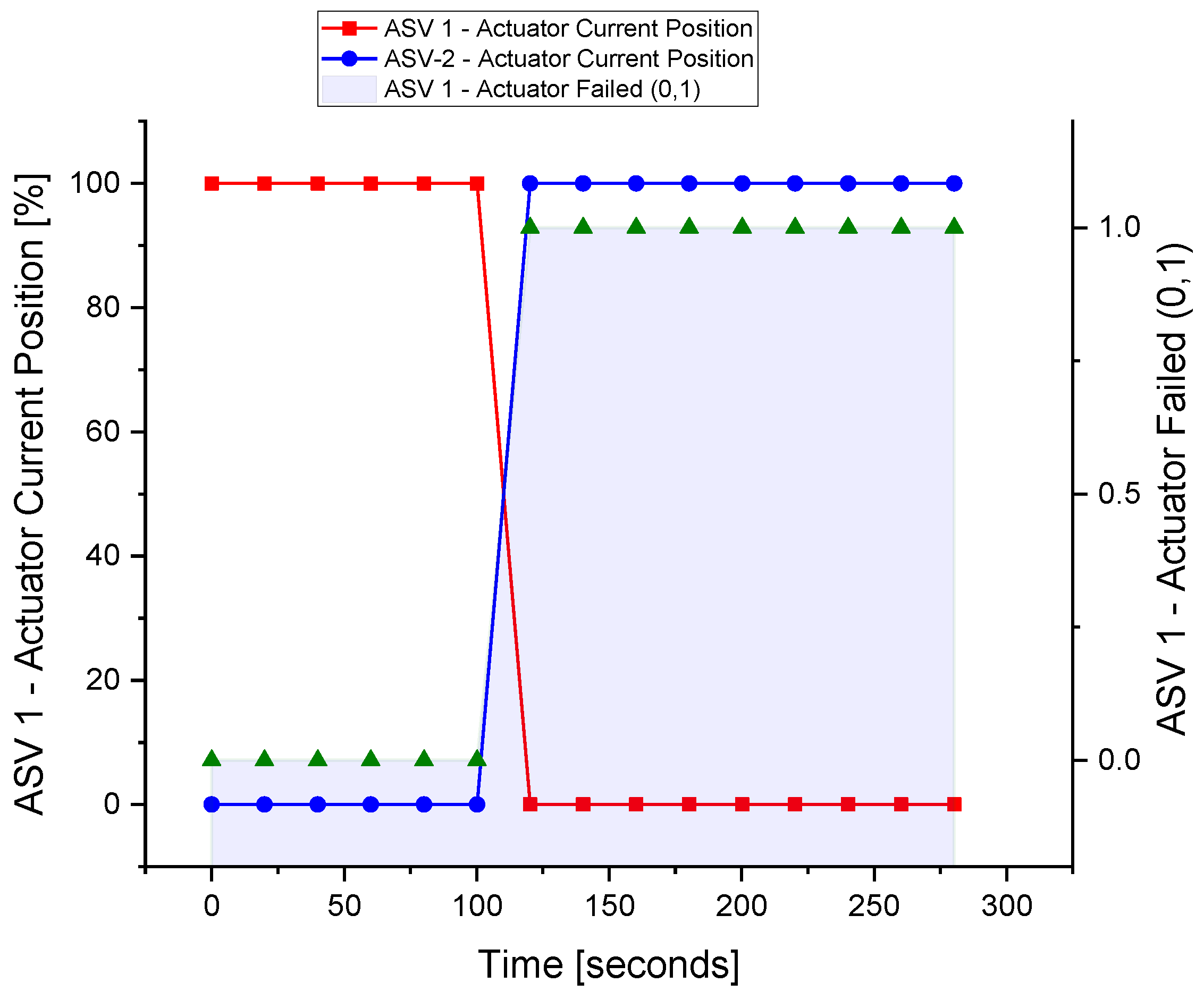
3.5. Fault Tolerance in Actuators
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| CC | Centrifugal Compressor |
| FTC | Fault-Tolerant Control |
| AFTCS | Active Fault-Tolerant Control System |
| ASC | Anti-Surge Control |
| ASV | Anti-Surge Valve |
| FIU | Fault Injection Unit |
| FTC | Fault-Tolerant Control |
| OP | Operating Point |
| PFTCS | Passive Fault-Tolerant Control System |
| SCL | Surge Control Line |
| SLL | Surge Limit Line |
| TMR | Triple Modular Redundancy |
| ∆Pos | Differential Pressure |
| hr | Reduced Head Pressure |
| Kc | Proportional Gain |
| Pd | Discharge Pressure |
| Ps | Suction Pressure |
| Reduced Flow | |
| Rc | Compression Ratio |
| Ss | Surge Parameter |
| Td | Discharge Temperature |
| Ti | Integral Reset Time |
| Ts | Suction Temperature |
| σ | Polytrophic Head Exponent |
| Reduced flow at SLL |
References
- Amin, A.A.; Hasan, K.M. A review of Fault Tolerant Control Systems: Advancements and applications. Measurement 2019, 143, 58–68. [Google Scholar] [CrossRef]
- Wang, Y.; Zhou, D.; Qin, S.J.; Wang, H. Active fault-tolerant control for a class of nonlinear systems with sensor faults. Int. J. Control. Autom. Syst. 2008, 6, 339–350. [Google Scholar]
- Tayyeb, M.; Riaz, U.; Amin, A.; Saleem, O.; Arslan, M.; Shahbaz, M. Design of highly redundant fault tolerant control for aircraft elevator system. J. Appl. Eng. Sci. 2021, 19, 37–47. [Google Scholar] [CrossRef]
- Blanke, M.; Frei, W.C.; Kraus, F.; Patton, J.R.; Staroswiecki, M. What is Fault-Tolerant Control? IFAC Proc. Vol. 2000, 33, 41–52. [Google Scholar] [CrossRef] [Green Version]
- Amin, A.A.; Mahmood-Ul-Hasan, K. Robust active fault-tolerant control for internal combustion gas engine for air–fuel ratio control with statistical regression-based observer model. Meas. Control 2019, 52, 1179–1194. [Google Scholar] [CrossRef]
- Amin, A.A.; Mahmood-Ul-Hasan, K. Hybrid fault tolerant control for air-fuel ratio control of internal combustion gasoline engine using Kalman filters with advanced redundancy. Meas. Control 2019, 52, 473–492. [Google Scholar] [CrossRef]
- Amin, A.A.; Mahmood-Ul-Hasan, K. Advanced Fault Tolerant Air-Fuel Ratio Control of Internal Combustion Gas Engine for Sensor and Actuator Faults. IEEE Access 2019, 7, 17634–17643. [Google Scholar] [CrossRef]
- Amin, A.A.; Mahmood-Ul-Hasan, K. Robust Passive Fault Tolerant Control for Air Fuel Ratio Control of Internal Combustion Gasoline Engine for Sensor and Actuator Faults. IETE J. Res. 2021, 1–16. [Google Scholar] [CrossRef]
- Benosman, M.; Lum, K.-Y. Passive Actuators’ Fault-Tolerant Control for Affine Nonlinear Systems. IEEE Trans. Control Syst. Technol. 2009, 18, 152–163. [Google Scholar] [CrossRef]
- Niemann, H.; Stoustrup, J. Passive fault tolerant control of a double inverted pendulum—A case study. Control Eng. Pr. 2005, 13, 1047–1059. [Google Scholar] [CrossRef] [Green Version]
- Wang, R.; Wang, J. Passive Actuator Fault-Tolerant Control for a Class of Overactuated Nonlinear Systems and Applications to Electric Vehicles. IEEE Trans. Veh. Technol. 2013, 62, 972–985. [Google Scholar] [CrossRef]
- Shahbaz, M.H.; Amin, A.A. Design of Active Fault Tolerant Control System for Air Fuel Ratio Control of Internal Combustion Engines Using Artificial Neural Networks. IEEE Access 2021, 9, 46022–46032. [Google Scholar] [CrossRef]
- Ahmed, S.; Amin, A.A.; Wajid, Z.; Ahmad, F. Reliable speed control of a permanent magnet DC motor using fault-tolerant H-bridge. Adv. Mech. Eng. 2020, 12, 1687814020970311. [Google Scholar] [CrossRef]
- Khatibi, M.; Haeri, M. A unified framework for passive–active fault-tolerant control systems considering actuator saturation and L∞ disturbances. Int. J. Control 2019, 92, 653–663. [Google Scholar] [CrossRef]
- Wang, J.; Yao, X.; Li, W. Hybrid active-passive robust fault-tolerant control of event-triggered nonlinear NCS. Open Electr. Electron. Eng. J. 2017, 11, 68–86. [Google Scholar] [CrossRef]
- Shen, Q.; Jiang, B.; Shi, P. Neural Network-Based Fault Tolerant Control Scheme Against Un-modeled Fault. In Fault Diagnosis and Fault-Tolerant Control Based on Adaptive Control Approach; Springer: Berlin/Heidelberg, Germany, 2017; pp. 163–190. [Google Scholar]
- Gao, Z.; Cecati, C.; Ding, S.X. A Survey of Fault Diagnosis and Fault-Tolerant Techniques—Part I: Fault Diagnosis with Model-Based and Signal-Based Approaches. IEEE Trans. Ind. Electron. 2015, 62, 3757–3767. [Google Scholar] [CrossRef] [Green Version]
- Gao, Z.; Cecati, C.; Ding, S.X. A Survey of Fault Diagnosis and Fault-Tolerant Techniques Part II: Fault Diagnosis with Knowledge-Based and Hybrid/Active Approaches. IEEE Trans. Ind. Electron. 2015, 62, 1. [Google Scholar] [CrossRef] [Green Version]
- Gao, Z.; Ding, S.X.; Cecati, C. Real-time fault diagnosis and fault-tolerant control. IEEE Trans. Ind. Electron. 2015, 62, 3752–3756. [Google Scholar] [CrossRef] [Green Version]
- Djeziri, M.A.; Aitouche, A.; Bouamama, B.O. Sensor fault detection of energetic system using modified parity space approach. In Proceedings of the 46th IEEE Conference on Decision and Control, New Orleans, LA, USA, 12–14 December 2007; pp. 2578–2583. [Google Scholar] [CrossRef]
- Amin, A.A.; Maqsood, M.T.; Mahmood-Ul-Hasan, K. Surge protection of centrifugal compressors using advanced anti-surge control system. Meas. Control 2021, 54, 967–982. [Google Scholar] [CrossRef]
- Moore, F.K.; Greitzer, E.M. A Theory of Post-Stall Transients in Axial Compression Systems: Part I—Development of Equations. J. Eng. Gas Turbines Power 1986, 108, 68–76. [Google Scholar] [CrossRef]
- Uddin, N.; Gravdahl, J.T. Active Compressor Surge Control Using Piston Actuation. In Proceedings of the ASME 2011 Dynamic Systems and Control Conference and Bath/ASME Symposium on Fluid Power and Motion Control, Arlington, VA, USA, 31 October–2 November 2011; ASMEDC: Arlington, VA, USA, 2011; Volume 1, pp. 69–76. [Google Scholar]
- Greitzer, E.M. Surge and Rotating Stall in Axial Flow Compressors—Part I: Theoretical Compression System Model. J. Eng. Power 1976, 98, 190–198. [Google Scholar] [CrossRef]
- Greitzer, E.M. Surge and Rotating Stall in Axial Flow Compressors—Part II: Experimental Results and Comparison with Theory. J. Eng. Power 1976, 98, 199–211. [Google Scholar] [CrossRef]
- Hansen, K.E.; Jorgensen, P.; Larsen, P.S. Experimental and Theoretical Study of Surge in a Small Centrifugal Compressor. J. Fluids Eng. 1981, 103, 391–395. [Google Scholar] [CrossRef]
- Alwi, H.; Edwards, C. Fault tolerant control using sliding modes with on-line control allocation. Automatica 2008, 44, 1859–1866. [Google Scholar] [CrossRef] [Green Version]
- Tayyeb, M.; Amin, A.A. A Review of Sliding Mode Control with the Perspective of Utilization in Fault Tolerant Control. Recent Adv. Electr. Electron. Eng. 2021, 14, 312–324. [Google Scholar] [CrossRef]
- Zhang, X.; Parisini, T.; Polycarpou, M. Adaptive Fault-Tolerant Control of Nonlinear Uncertain Systems: An Information-Based Diagnostic Approach. IEEE Trans. Autom. Control 2004, 49, 1259–1274. [Google Scholar] [CrossRef]
- Li, H.; Gao, H.; Shi, P.; Zhao, X. Fault-tolerant control of Markovian jump stochastic systems via the augmented sliding mode observer approach. Automatica 2014, 50, 1825–1834. [Google Scholar] [CrossRef]
- Cai, W.; Liao, X.H.; Song, Y.D. Indirect Robust Adaptive Fault -Tolerant Control for Attitude Tracking of Spacecraft. J. Guid. Control. Dyn. 2008, 31, 1456–1463. [Google Scholar] [CrossRef]
- Zhang, Y.; Jiang, J. Active fault-tolerant control system against partial actuator failures. IEE Proc. Control. Theory Appl. 2002, 149, 95–104. [Google Scholar] [CrossRef]
- Shen, Q.; Jiang, B.; Cocquempot, V. Adaptive Fuzzy Observer-Based Active Fault-Tolerant Dynamic Surface Control for a Class of Nonlinear Systems with Actuator Faults. IEEE Trans. Fuzzy Syst. 2014, 22, 338–349. [Google Scholar] [CrossRef]
- Jiang, J.; Yu, X. Fault-tolerant control systems: A comparative study between active and passive approaches. Annu. Rev. Control 2012, 36, 60–72. [Google Scholar] [CrossRef]
- Paoli, A.; Sartini, M.; Lafortune, S. Active fault tolerant control of discrete event systems using online diagnostics. Automatica 2011, 47, 639–649. [Google Scholar] [CrossRef]
- Amin, A.A.; Mahmood-Ul-Hasan, K. Unified Fault-Tolerant Control for Air-Fuel Ratio Control of Internal Combustion Engines with Advanced Analytical and Hardware Redundancies. J. Electr. Eng. Technol. 2021, 17, 1947–1959. [Google Scholar] [CrossRef]
- Riaz, U.; Amin, A.A.; Tayyeb, M. Design of active fault-tolerant control system for Air-fuel ratio control of internal combustion engines using fuzzy logic controller. Sci. Prog. 2022, 105, 1–29. [Google Scholar] [CrossRef] [PubMed]
- Alshorman, A.M.; Alshorman, O.; Irfan, M.; Glowacz, A.; Muhammad, F.; Caesarendra, W. Fuzzy-Based Fault-Tolerant Control for Omnidirectional Mobile Robot. Machines 2020, 8, 55. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Description | Field Values | HYSYS Values | Percentage | Units |
|---|---|---|---|---|
| Error (%) | ||||
| Suction Temperature | 33.5 | 33.81 | 0.93 | degC |
| Suction Pressure | 1534 | 1529 | 0.33 | kPag |
| Discharge Temperature | 98.8 | 88.3 | 10.63 | degC |
| Suction Flow | 13.7 | 13.42 | 2.04 | kPag |
| Discharge Pressure | 2982 | 2925 | 1.91 | kPag |
| Compressor Speed | 7744 | 7744 | 0.00 | RPM |
| Suction Throttle | 99.77 | 100 | 0.23 | % |
| ASV Position | 0 | 0 | 0.00 | % |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alsuwian, T.; Amin, A.A.; Maqsood, M.T.; Qadir, M.B.; Almasabi, S.; Jalalah, M. Advanced Fault-Tolerant Anti-Surge Control System of Centrifugal Compressors for Sensor and Actuator Faults. Sensors 2022, 22, 3864. https://doi.org/10.3390/s22103864
Alsuwian T, Amin AA, Maqsood MT, Qadir MB, Almasabi S, Jalalah M. Advanced Fault-Tolerant Anti-Surge Control System of Centrifugal Compressors for Sensor and Actuator Faults. Sensors. 2022; 22(10):3864. https://doi.org/10.3390/s22103864
Chicago/Turabian StyleAlsuwian, Turki, Arslan Ahmed Amin, Muhammad Taimoor Maqsood, Muhammad Bilal Qadir, Saleh Almasabi, and Mohammed Jalalah. 2022. "Advanced Fault-Tolerant Anti-Surge Control System of Centrifugal Compressors for Sensor and Actuator Faults" Sensors 22, no. 10: 3864. https://doi.org/10.3390/s22103864