
Propagation Attenuation Maps Based on Parabolic Equation Method †




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
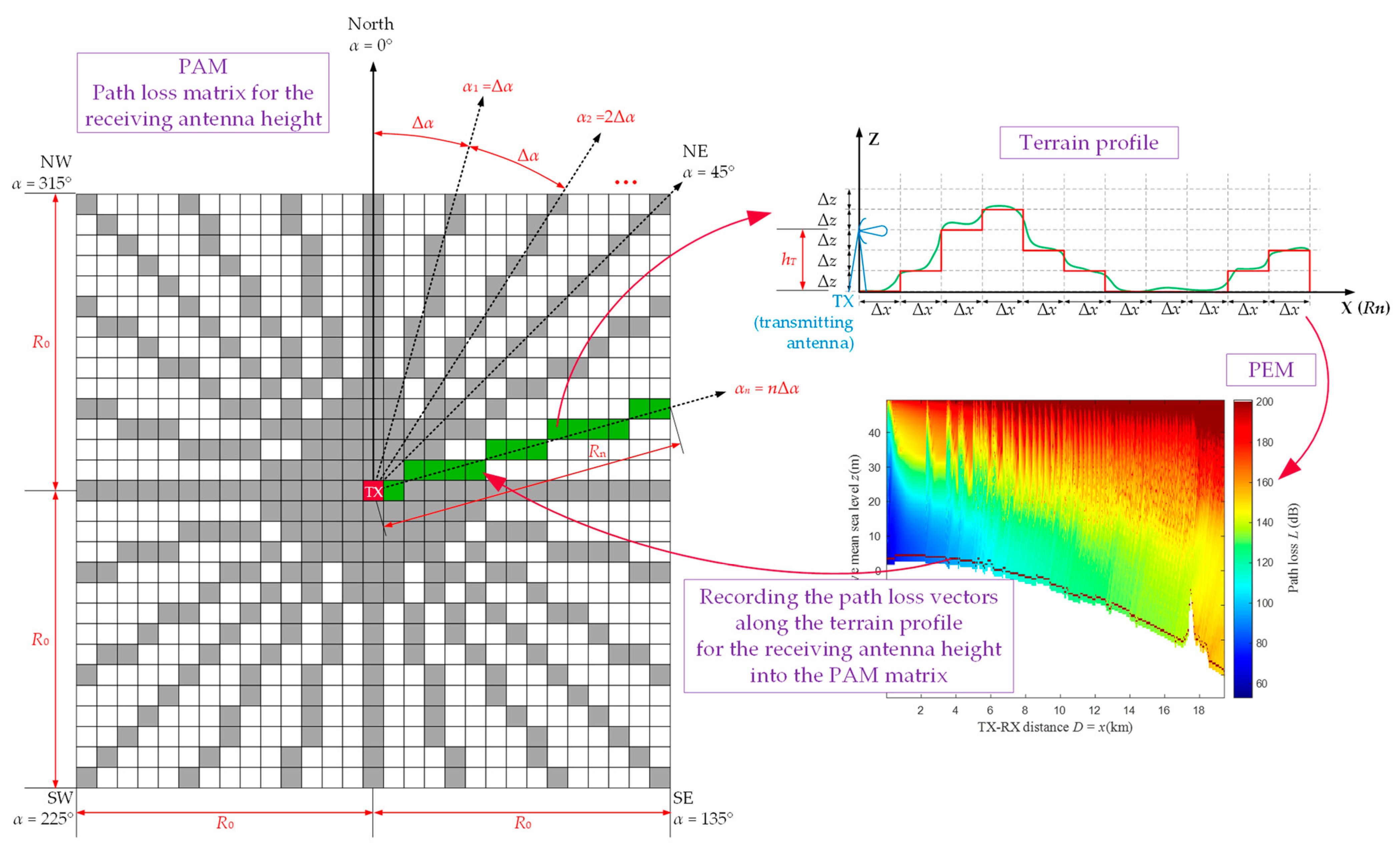
- determining the attenuation for given terrain profiles on specific azimuths outgoing radially from the transmitter (TX);
- using linear interpolation to determine the attenuation values between the profiles to determine the entire PAM.
2. Radio Environment Maps
- direct methods based on the interpolation approach, using spatial statistics and measurements of signal levels made in specific locations, make a direct estimation of the missing data (e.g., nearest neighbor, inverse distance weighting (IDW), and kriging);
- indirect methods based on the use of the TX location and its parameters as well as propagation models;
- hybrid methods combining both of the above approaches.
3. Propagation Attenuation Map
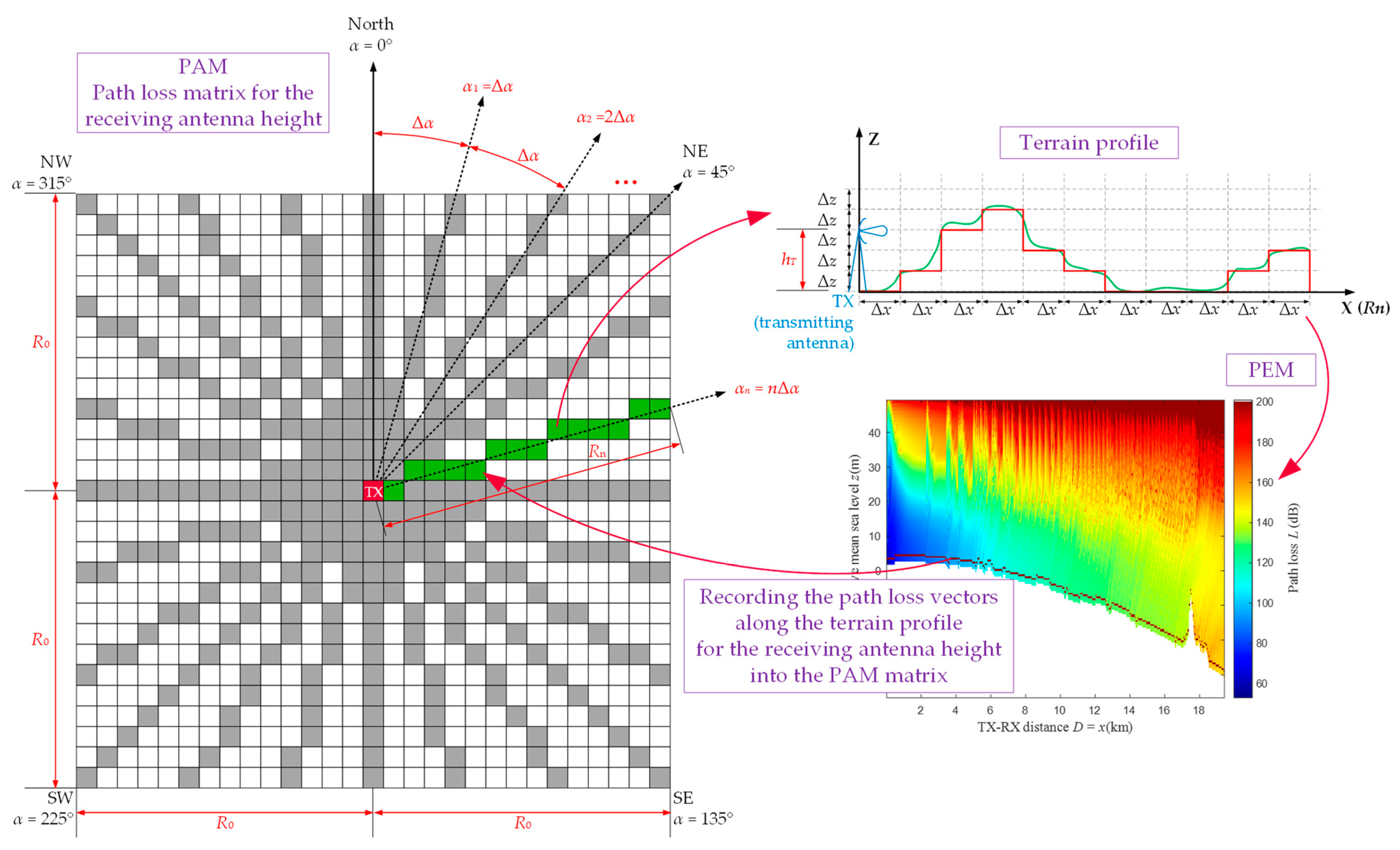
3.1. Idea of PAM Algorithm
3.2. Parabolic Equation Method
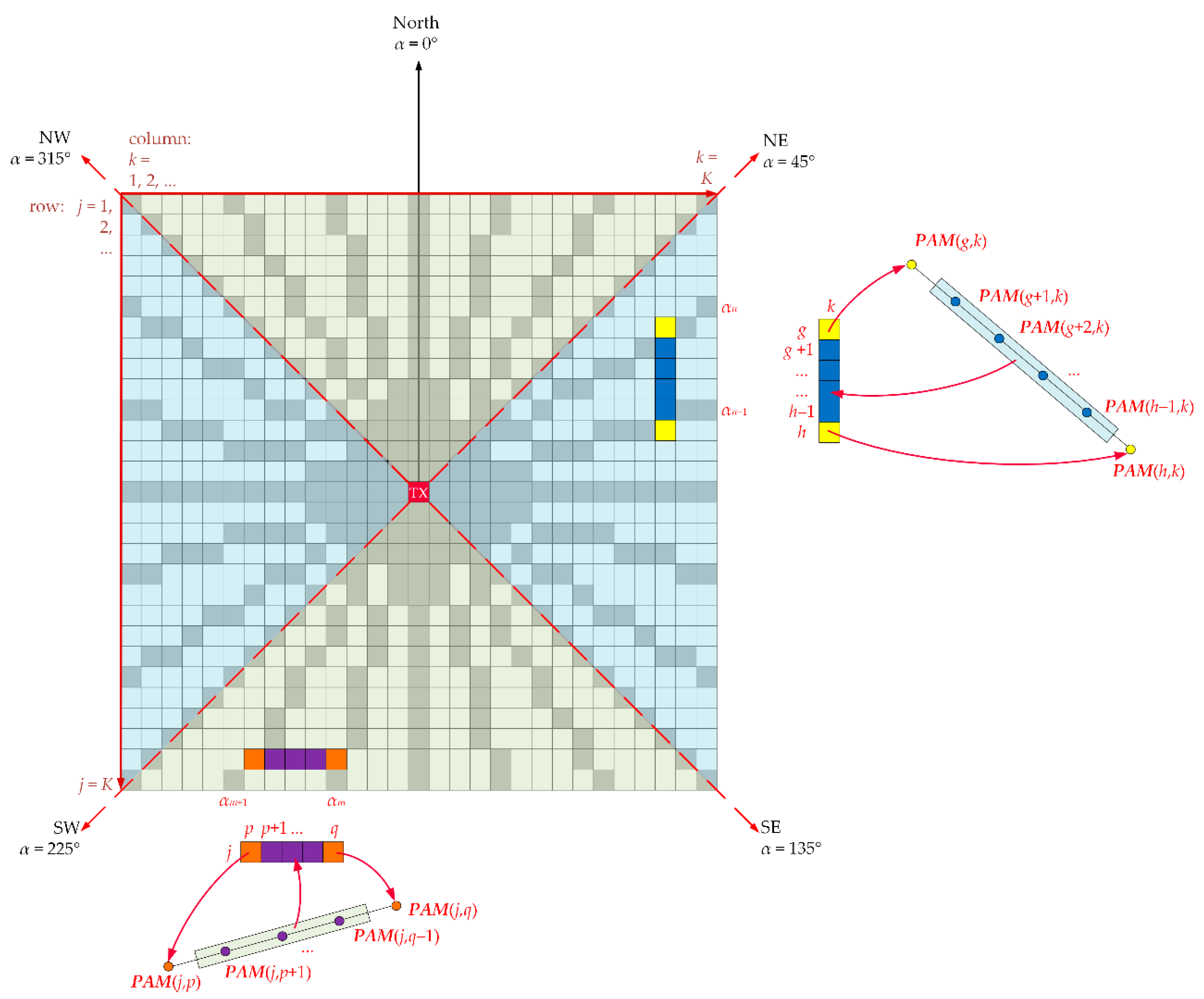
3.3. PAM Algorithm
| Algorithm 1(Creating sparse PAM matrix based on PEM for selected terrain profiles) |
Require: DTED, DTED resolution (ΔR), radius of the analyzed area (R0), TX location, angular resolution (Δα), receiving antenna height (hR).
|
- in a column—for the azimuth directions:
- ○
- (i.e., for ),
- ○
- (i.e., for ),
- or in a row—for the remaining azimuth directions:
- ○
- or (i.e., for ),
- ○
- (i.e., for ).
| Algorithm 2(Creating full PAM matrix based on interpolation) |
| Require: sparse PAM matrix (PAM). Interpolation in columns:
repeat
Interpolation in rows:
repeat
|
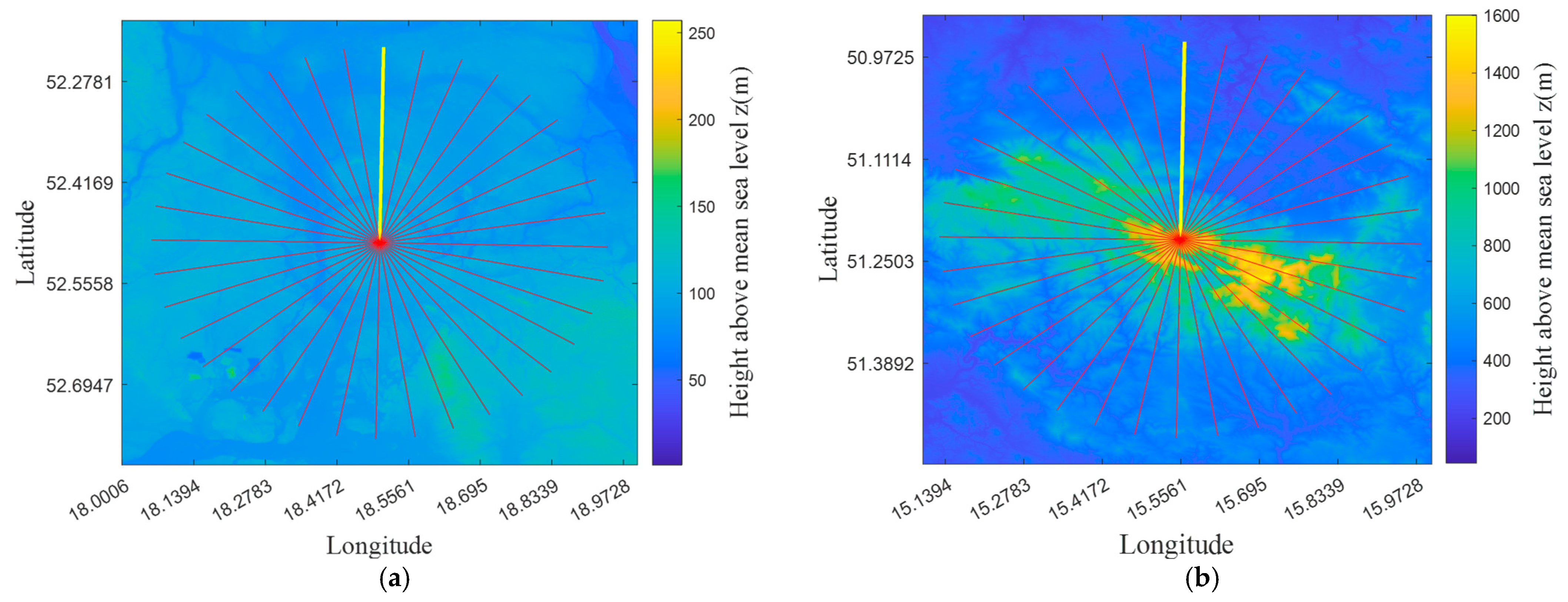
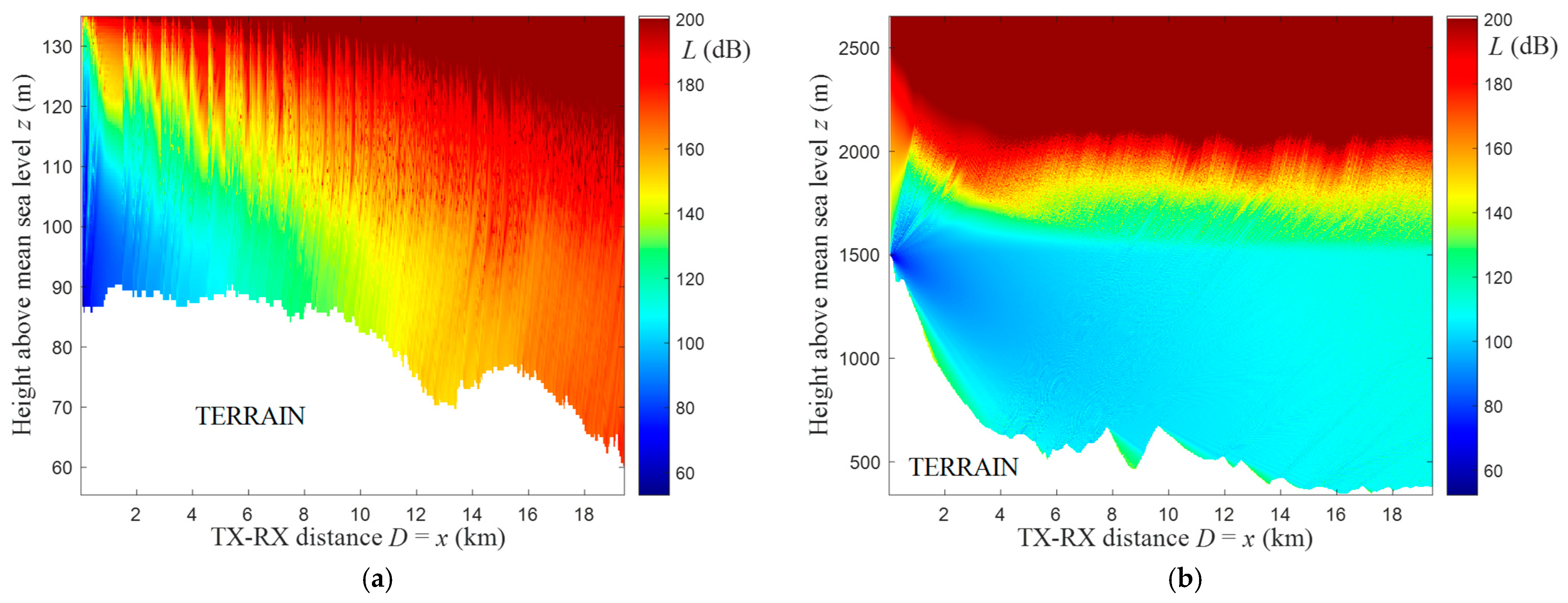
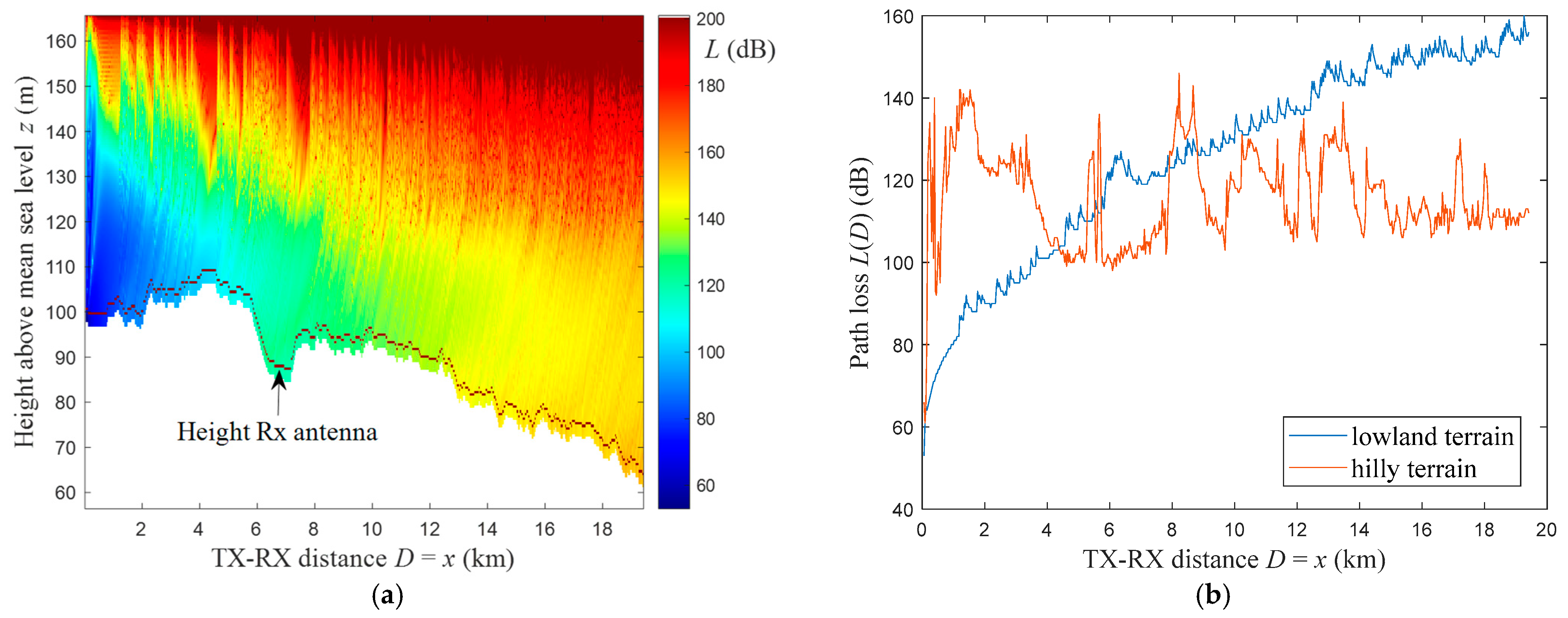
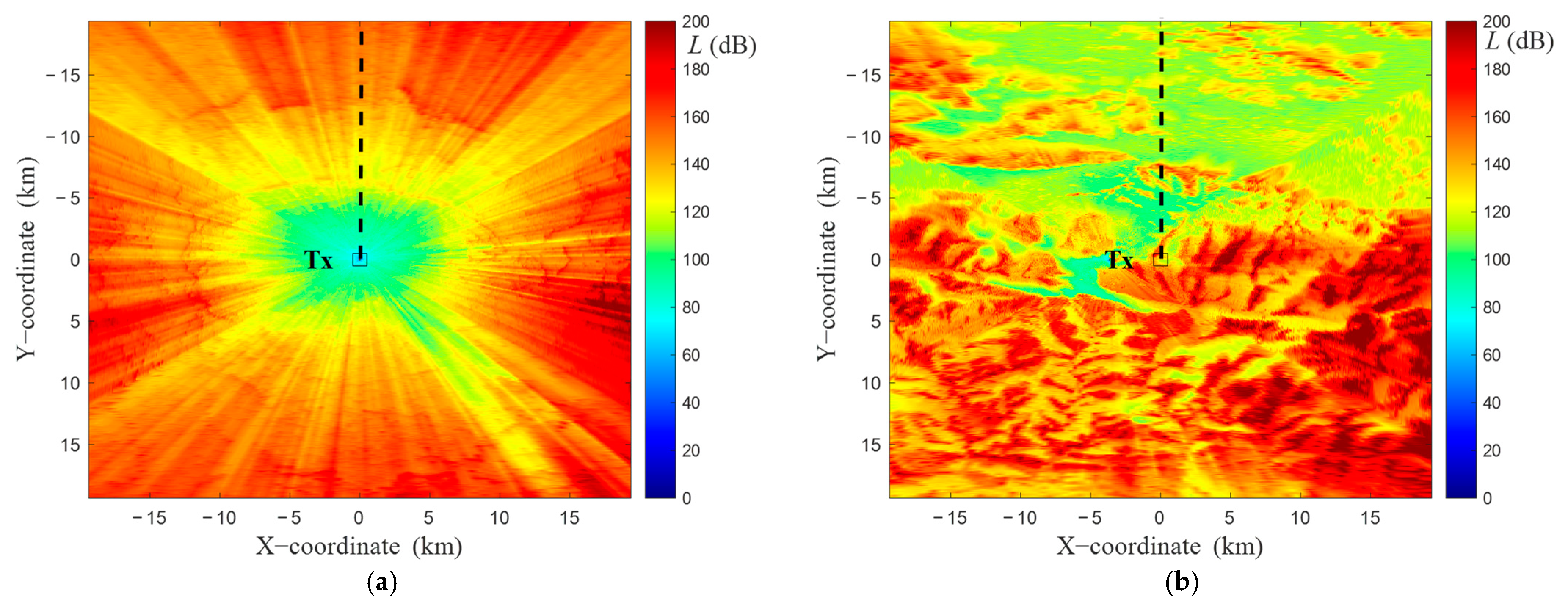
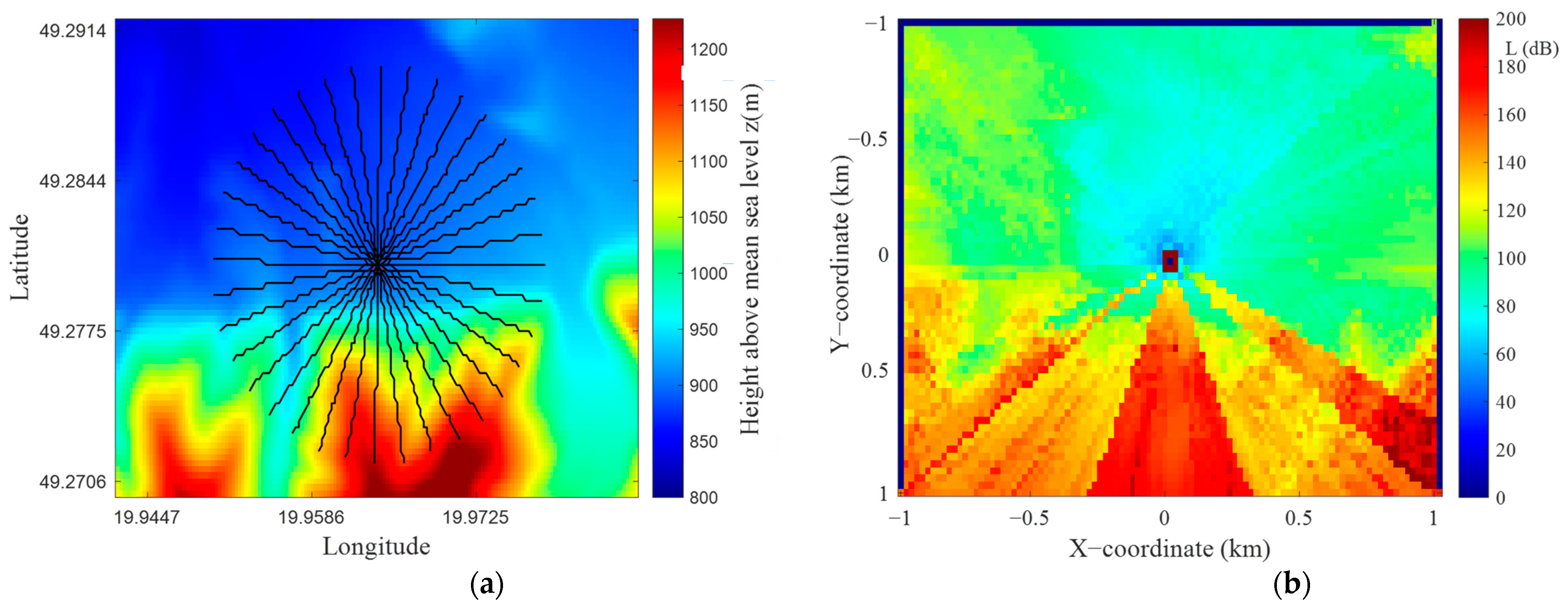
3.4. Exemplary Results
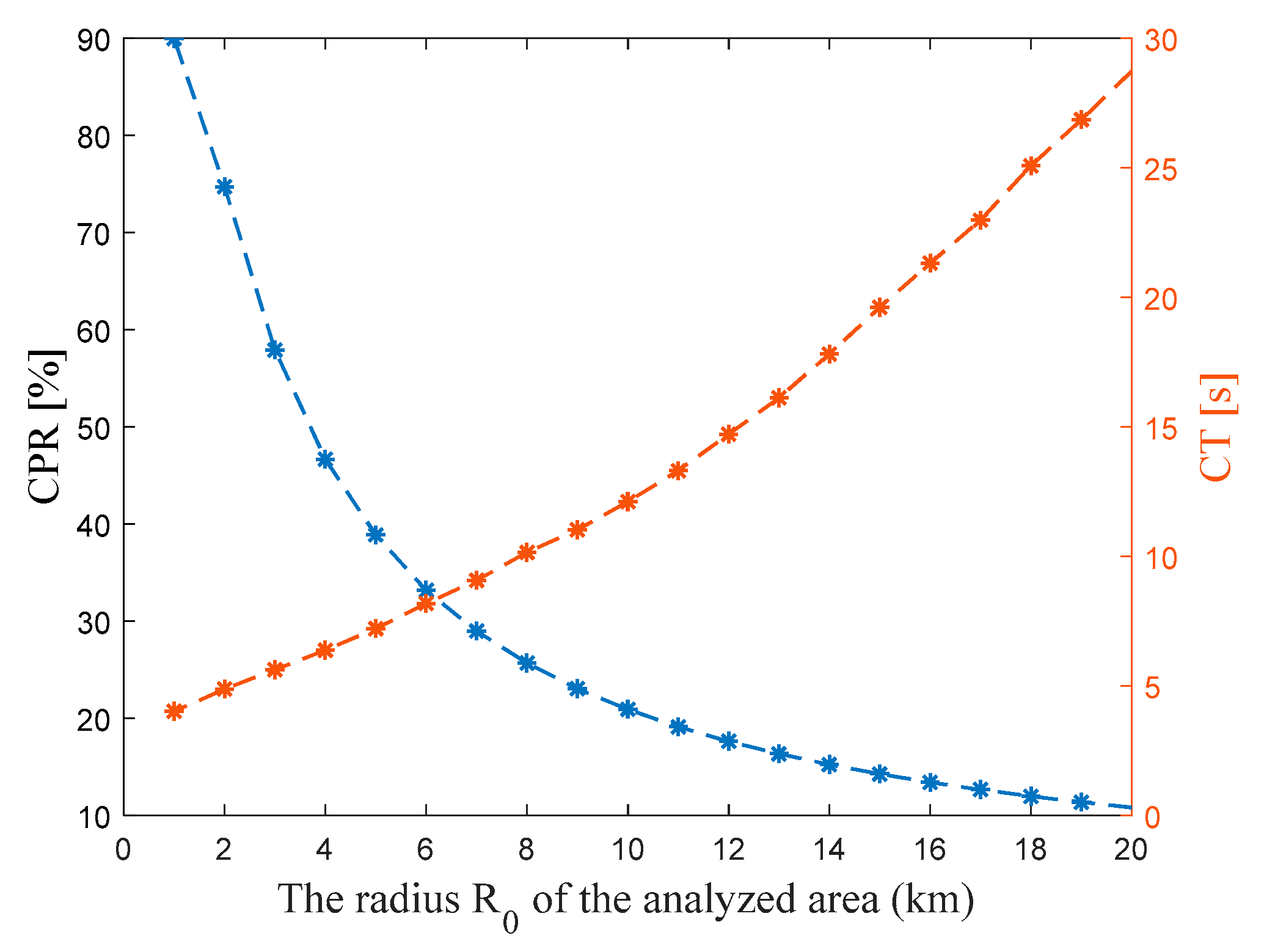
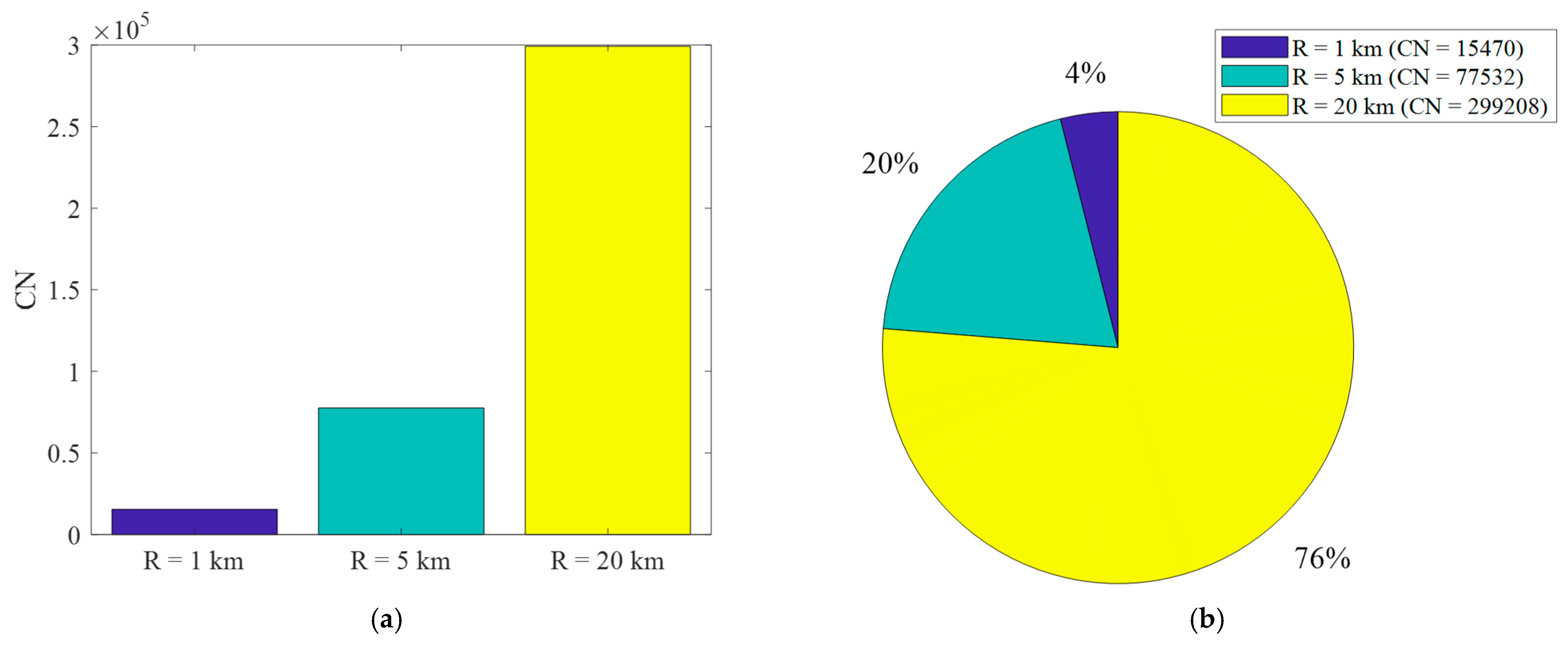
4. Efficiency of Creating PAM versus Its Dimensions
4.1. Metrics
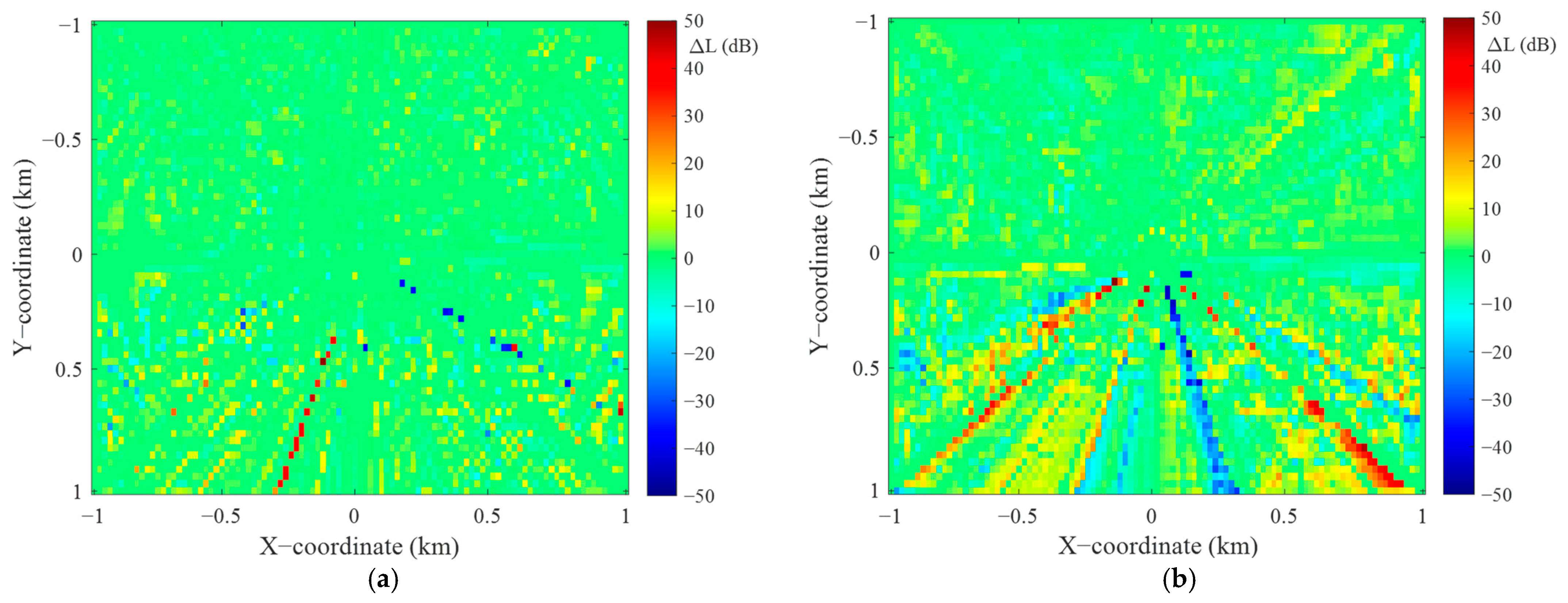
4.2. Result Analysis
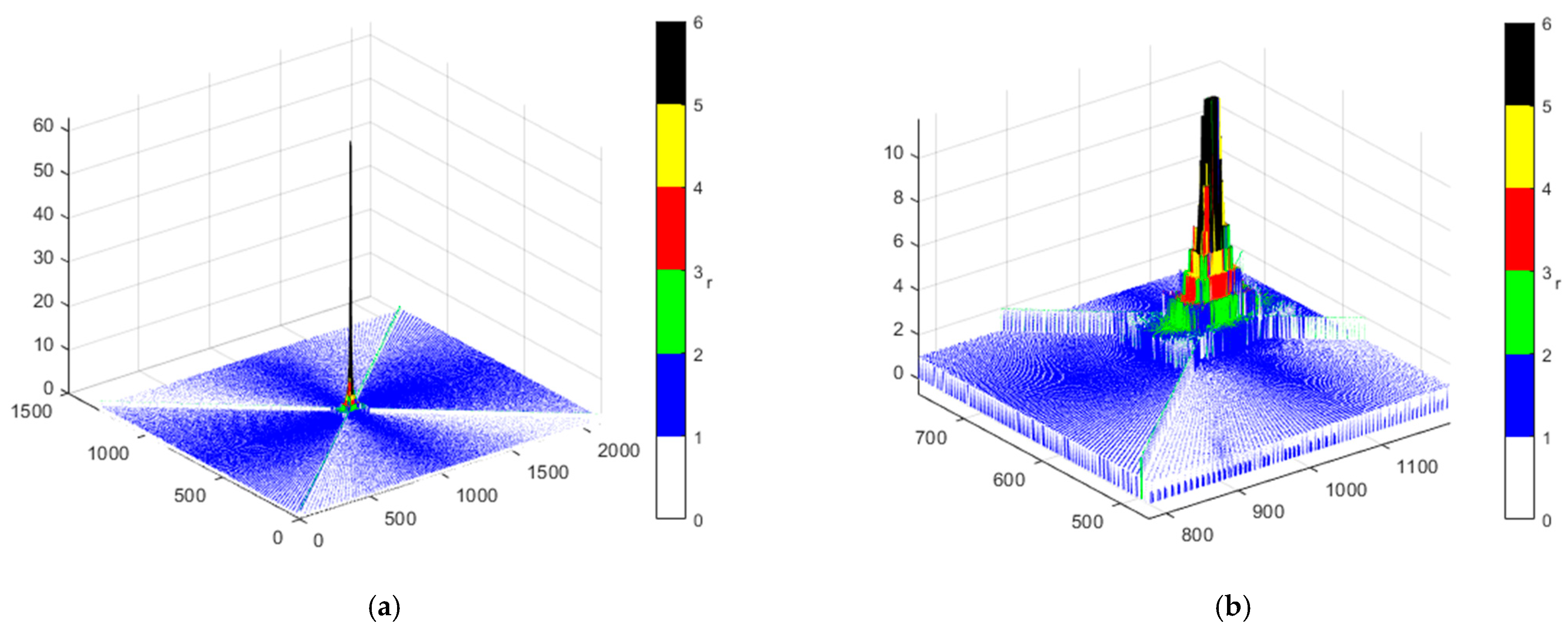
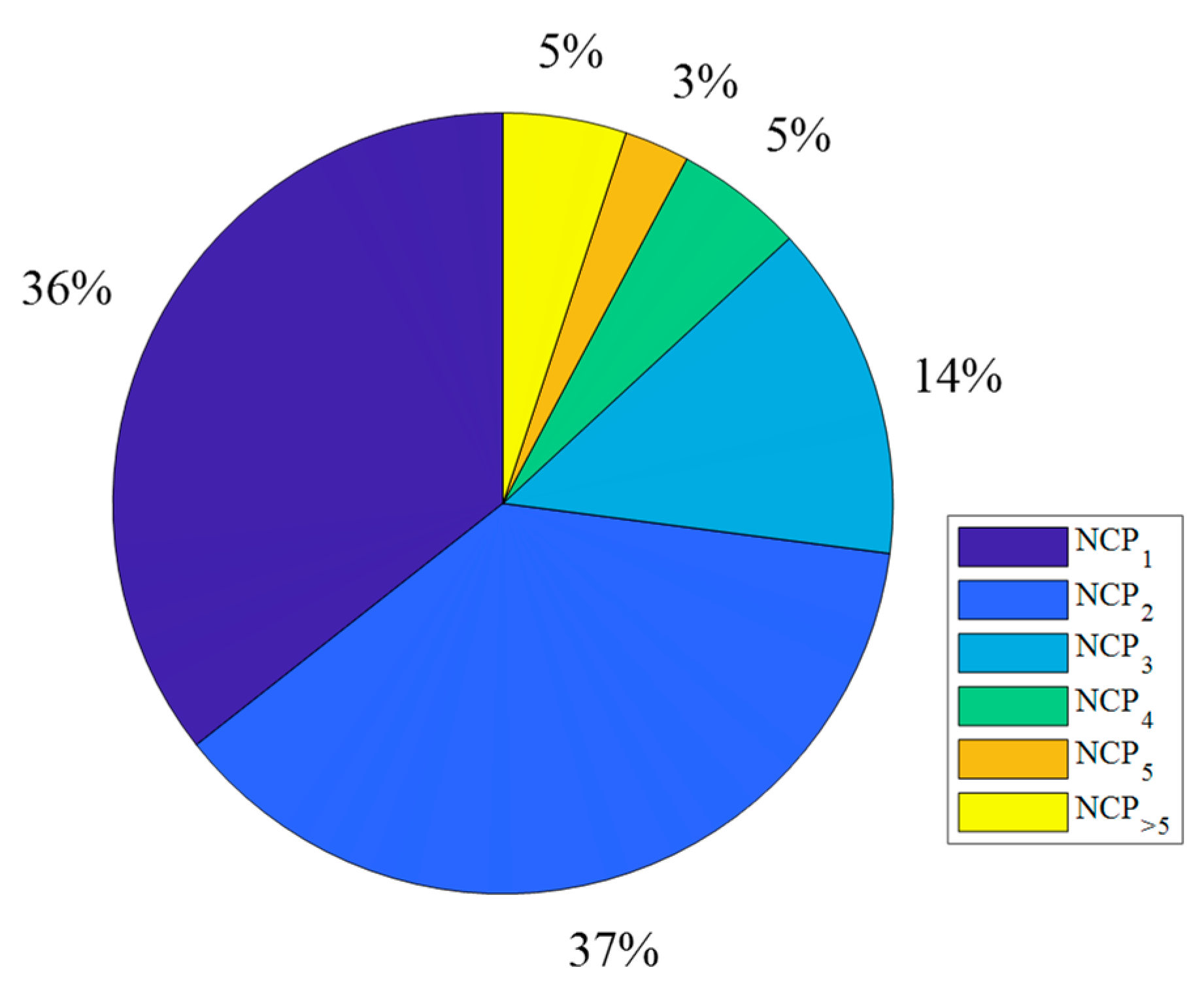
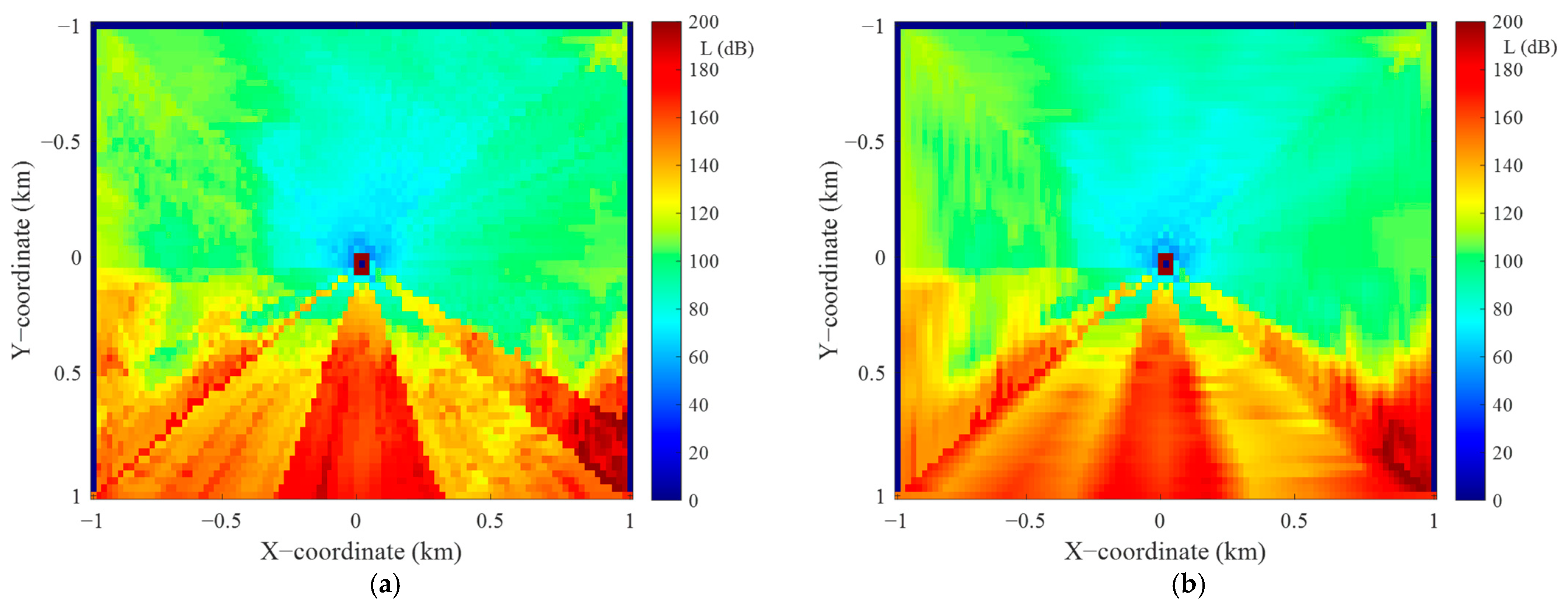
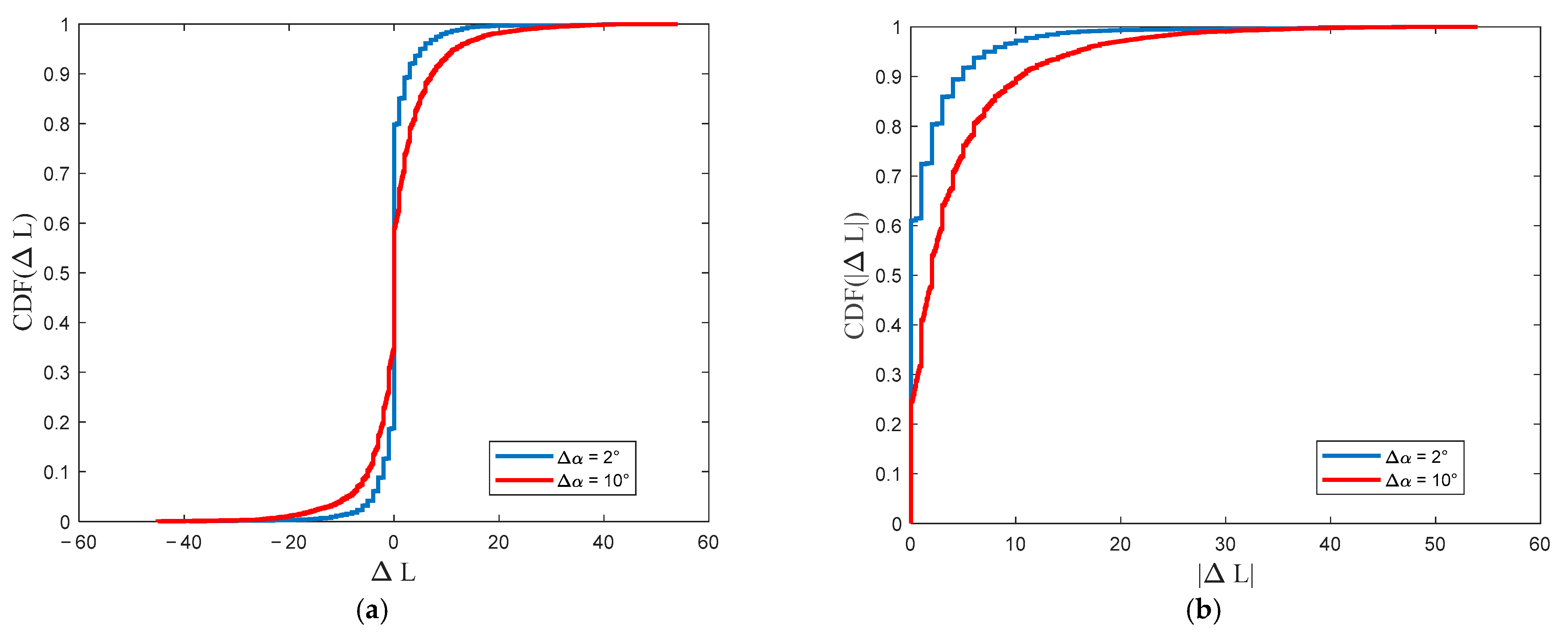
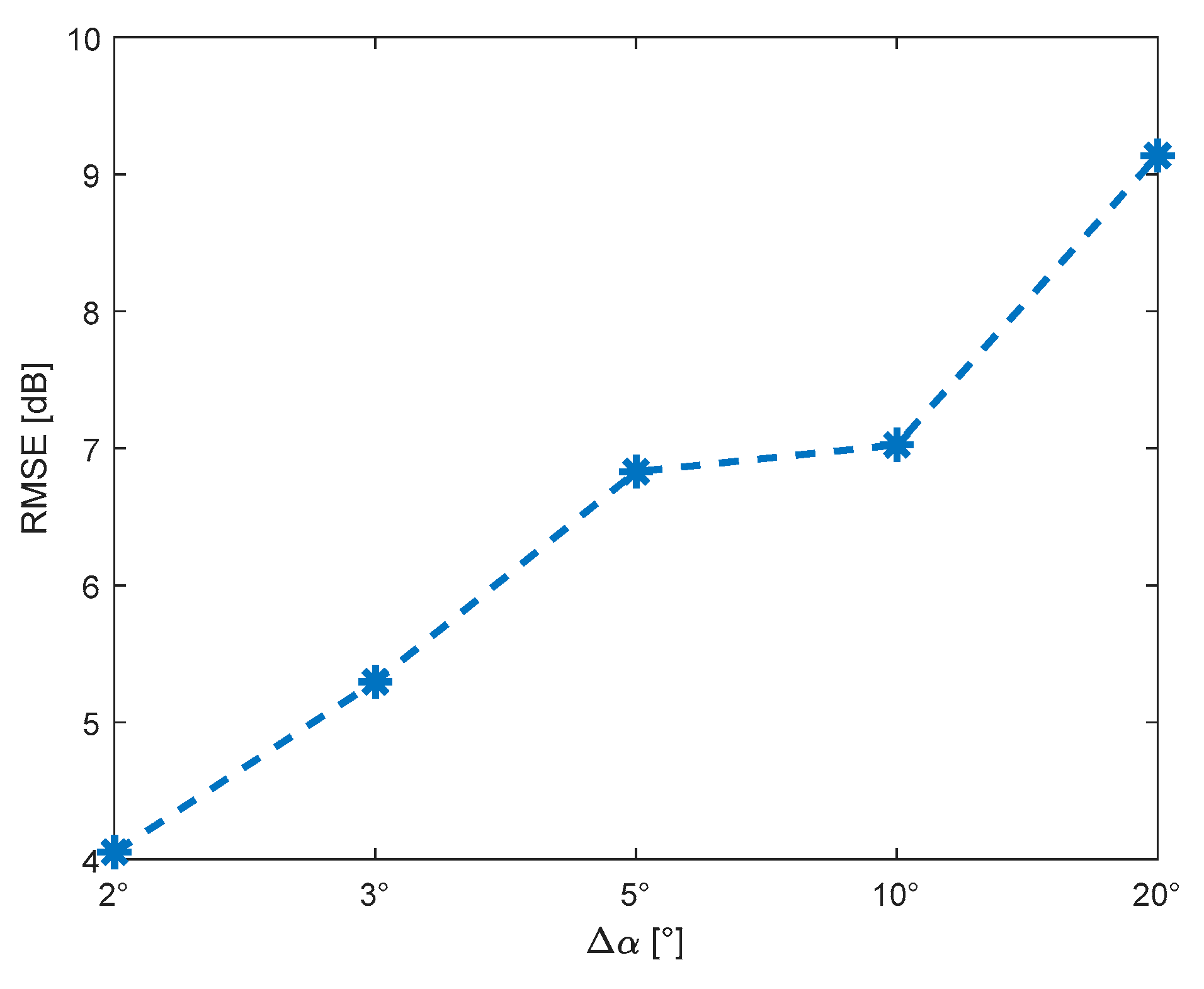
5. PAM Accuracy Evaluation versus Angular Resolution of Terrain Profiles
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| 2D | two-dimensional |
| 3D | three-dimensional |
| 5G | fifth-generation |
| BMS | battlefield management system |
| CDF | cumulative distribution function |
| DSA | dynamic spectrum access |
| DTED | digital terrain elevation data |
| FDM | finite-difference method |
| FEM | finite-element method |
| G-REM | global radio environment map |
| IDW | inverse distance weighting |
| ISO | International Organization for Standardization |
| L-REM | local radio environment map |
| LTE | Long Term Evolution |
| LTE-A | Long Term Evolution Advance |
| MANET | mobile ad-hoc network |
| MIMO | multiple-input-multiple-output |
| NR | New Radio |
| OSI | open systems interconnection |
| PAM | propagation attenuation map |
| PEM | parabolic equation method |
| REM | radio environment map |
| RF | radio-frequency |
| RF-REM | radio-frequency radio environment map |
| RRM | radio resource management |
| RTM | ray-tracing method |
| RX | receiver |
| SDR | software-defined radio |
| SON | self-organizing network |
| SSFT | split-step Fourier transform |
| TX | transmitter |
References
- Liu, G.; Huang, Y.; Chen, Z.; Liu, L.; Wang, Q.; Li, N. 5G Deployment: Standalone vs. Non-Standalone from the Operator Perspective. IEEE Commun. Mag. 2020, 58, 83–89. [Google Scholar] [CrossRef]
- Fodor, G.; Vinogradova, J.; Hammarberg, P.; Nagalapur, K.K.; Qi, Z.T.; Do, H.; Blasco, R.; Baig, M.U. 5G New Radio for Automotive, Rail, and Air Transport. IEEE Commun. Mag. 2021, 59, 22–28. [Google Scholar] [CrossRef]
- Giambene, G.; Kota, S.; Pillai, P. Satellite-5G Integration: A Network Perspective. IEEE Netw. 2018, 32, 25–31. [Google Scholar] [CrossRef]
- Hu, B.; Gharavi, H. A Hybrid Wired/Wireless Deterministic Network for Smart Grid. IEEE Wirel. Commun. 2021, 28, 138–143. [Google Scholar] [CrossRef]
- Harvey, J.F.; Steer, M.B.; Rappaport, T.S. Exploiting High Millimeter Wave Bands for Military Communications, Applications, and Design. IEEE Access 2019, 7, 52350–52359. [Google Scholar] [CrossRef]
- Bastos, L.; Capela, G.; Koprulu, A. Potential of 5G Technologies for Military Application; NATO Communications and Information Agency (NCIA): Hague, The Netherlands, 2020; pp. 1–8. [Google Scholar]
- Liao, J.; Ou, X. 5G Military Application Scenarios and Private Network Architectures. In Proceedings of the 2020 IEEE International Conference on Advances in Electrical Engineering and Computer Applications (AEECA), Dalian, China, 25–27 August 2020; pp. 726–732. [Google Scholar]
- Grønsund, P.; Gonzalez, A.; Mahmood, K.; Nomeland, K.; Pitter, J.; Dimitriadis, A.; Berg, T.-K.; Gelardi, S. 5G Service and Slice Implementation for a Military Use Case. In Proceedings of the 2020 IEEE International Conference on Communications Workshops (ICC Workshops), Dublin, Ireland, 7–11 June 2020; pp. 1–6. [Google Scholar]
- Gupta, A.; Jha, R.K. A Survey of 5G Network: Architecture and Emerging Technologies. IEEE Access 2015, 3, 1206–1232. [Google Scholar] [CrossRef]
- Agiwal, M.; Roy, A.; Saxena, N. Next Generation 5G Wireless Networks: A Comprehensive Survey. IEEE Commun. Surv. Tutor. 2016, 18, 1617–1655. [Google Scholar] [CrossRef]
- Akpakwu, G.A.; Silva, B.J.; Hancke, G.P.; Abu-Mahfouz, A.M. A Survey on 5G Networks for the Internet of Things: Communication Technologies and Challenges. IEEE Access 2018, 6, 3619–3647. [Google Scholar] [CrossRef]
- Cai, Y.; Qin, Z.; Cui, F.; Li, G.Y.; McCann, J.A. Modulation and Multiple Access for 5G Networks. IEEE Commun. Surv. Tutor. 2018, 20, 629–646. [Google Scholar] [CrossRef] [Green Version]
- Dai, L.; Wang, B.; Ding, Z.; Wang, Z.; Chen, S.; Hanzo, L. A Survey of Non-Orthogonal Multiple Access for 5G. IEEE Commun. Surv. Tutor. 2018, 20, 2294–2323. [Google Scholar] [CrossRef] [Green Version]
- Younis, O.; Kant, L.; Chang, K.; Young, K.; Graff, C. Cognitive MANET Design for Mission-Critical Networks. IEEE Commun. Mag. 2009, 47, 64–71. [Google Scholar] [CrossRef]
- Malon, K.; Skokowski, P.; Łopatka, J. Optimization of the MANET Topology in Urban Area Using Redundant Relay Points. In Proceedings of the 2018 19th International Conference on Military Communications and Information Systems (ICMCIS), Warsaw, Poland, 22–23 May 2018; pp. 1–4. [Google Scholar]
- Wan, L.; Han, G.; Shu, L.; Feng, N.; Zhu, C.; Lloret, J. Distributed Parameter Estimation for Mobile Wireless Sensor Network Based on Cloud Computing in Battlefield Surveillance System. IEEE Access 2015, 3, 1729–1739. [Google Scholar] [CrossRef]
- Cha, S.H.; Shin, M.; Ham, J.-H.; Chung, M.Y. Robust Mobility Management Scheme in Tactical Communication Networks. IEEE Access 2018, 6, 15468–15479. [Google Scholar] [CrossRef]
- Dagres, I.; Polydoros, A.; Riihijärvi, J.; Nasreddine, J.; Mähönen, P.; Gavrilovska, L.; Atanasovski, V.; van de Beek, J.; Sayrac, B.; Grimoud, S.; et al. Radio Environmental Maps: Information Models and Reference Model; Flexible and Spectrum Aware Radio Access through Measurements and Modelling in Cognitive Radio Systems; ICT-248351 FARAMIR; 2011; p. 73. Available online: https://upcommons.upc.edu/bitstream/handle/2117/14940/FARAMIR-D4.1-Final.pdf (accessed on 15 March 2022).
- Pesko, M.; Javornik, T.; Košir, A.; Štular, M.; Mohorčič, M. Radio Environment Maps: The Survey of Construction Methods. KSII Trans. Internet Inf. Syst. 2014, 8, 3789–3809. [Google Scholar]
- Kryk, M. Creating Radio Environment Maps (REMs) Based on Various Path Loss Models. In Proceedings of the 2021 37th International Business Information Management Conference (IBIMA), Cordoba, Spain, 30–31 May 2021; pp. 9254–9264. [Google Scholar]
- Yun, Z.; Iskander, M.F. Ray Tracing for Radio Propagation Modeling: Principles and Applications. IEEE Access 2015, 3, 1089–1100. [Google Scholar] [CrossRef]
- Suchański, M.; Kaniewski, P.; Romanik, J.; Golan, E.; Zubel, K. Radio Environment Maps for Military Cognitive Networks: Density of Small-Scale Sensor Network vs. Map Quality. EURASIP J. Wirel. Commun. Netw. 2020, 2020, 189. [Google Scholar] [CrossRef]
- Kaniewski, P.; Romanik, J.; Golan, E.; Zubel, K. Spectrum Awareness for Cognitive Radios Supported by Radio Environment Maps: Zonal Approach. Appl. Sci. 2021, 11, 2910. [Google Scholar] [CrossRef]
- Grayver, E. Implementing Software Defined Radio; Springer: New York, NY, USA, 2012; ISBN 978-1-4419-9331-1. [Google Scholar]
- Wyglinski, A.M.; Pu, D. Digital Communication Systems Engineering with Software-Defined Radio; Artech House: Boston, MA, USA; London, UK, 2013; ISBN 978-1-60807-525-6. [Google Scholar]
- Skokowski, P.; Malon, K.; Kelner, J.M.; Dołowski, J.; Łopatka, J.; Gajewski, P. Adaptive Channels’ Selection for Hierarchical Cluster Based Cognitive Radio Networks. In Proceedings of the 2014 8th International Conference on Signal Processing and Communication Systems (ICSPCS), Gold Coast, QLD, Australia, 15–17 December 2014; pp. 1–6. [Google Scholar]
- Skokowski, P.; Malon, K.; Łopatka, J. Properties of Centralized Cooperative Sensing in Cognitive Radio Networks. In Proceedings of the XI Conference on Reconnaissance and Electronic Warfare Systems (CREWS), Oltarzew, Poland, 21–23 November 2016; International Society for Optics and Photonics (SPIE): Bellingham, WA, USA; Volume 10418, p. 1041807. [Google Scholar]
- Skokowski, P. Electromagnetic Situation Awareness Building in Ad-Hoc Networks with Cognitive Nodes; Military University of Technology: Warsaw, Poland, 2021; ISBN 978-83-7938-323-8. [Google Scholar]
- Malon, K.; Skokowski, P.; Łopatka, J. Optimization of Wireless Sensor Network Deployment for Electromagnetic Situation Monitoring. Int. J. Microw. Wirel. Technol. 2018, 10, 746–753. [Google Scholar] [CrossRef]
- Malon, K.; Skokowski, P.; Łopatka, J. The Use of a Wireless Sensor Network to Monitor the Spectrum in Urban Areas. In Proceedings of the XI Conference on Reconnaissance and Electronic Warfare Systems (CREWS), Oltarzew, Poland, 21–23 November 2016; International Society for Optics and Photonics (SPIE): Bellingham, WA, USA; Volume 10418, p. 1041809. [Google Scholar]
- Malon, K. Dynamic Spectrum Access in Ad-Hoc Radio Networks with Cognitive Nodes; Military University of Technology: Warsaw, Poland, 2021; ISBN 978-83-7938-327-6. [Google Scholar]
- Kelner, J.M.; Kryk, M.; Łopatka, J.; Gajewski, P. A Statistical Calibration Method of Propagation Prediction Model Based on Measurement Results. Int. J. Electron. Telecommun. 2020, 66, 11–16. [Google Scholar] [CrossRef]
- Kryk, M.; Malon, K.; Kelner, J.M. Algorithm of Creating Propagation Attenuation Maps Based on Parabolic Equation Method. In Proceedings of the 2021 Signal Processing Symposium (SPSympo), Lodz, Poland, 20–23 September 2021; pp. 138–142. [Google Scholar]
- Levy, M.F. Parabolic Equation Methods for Electromagnetic Wave Propagation; IET Electomagnetic Waves Series; The Institution of Engineering and Technology (IET): London, UK, 2000; ISBN 978-0-85296-764-5. [Google Scholar]
- Apaydin, G.; Sevgi, L. Radio Wave Propagation and Parabolic Equation Modeling; Wiley-IEEE Press: Hoboken, NJ, USA, 2017; ISBN 978-1-119-43211-1. [Google Scholar]
- Zhang, P.; Bai, L.; Wu, Z.; Guo, L. Applying the Parabolic Equation to Tropospheric Groundwave Propagation: A Review of Recent Achievements and Significant Milestones. IEEE Antennas Propag. Mag. 2016, 58, 31–44. [Google Scholar] [CrossRef]
- Yilmaz, H.B.; Tugcu, T.; Alagöz, F.; Bayhan, S. Radio Environment Map as Enabler for Practical Cognitive Radio Networks. IEEE Commun. Mag. 2013, 51, 162–169. [Google Scholar] [CrossRef]
- Yilmaz, H.B.; Tugcu, T. Location Estimation-Based Radio Environment Map Construction in Fading Channels. Wirel. Commun. Mob. Comput. 2015, 15, 561–570. [Google Scholar] [CrossRef]
- Leontovich, M.A.; Fock, V.A. Solution of the Problem of Propagation of Electromagnetic Waves along the Earth’s Surface by Method of Parabolic Equations. J. Phys.—USSR 1946, 10, 13–23. [Google Scholar]
- Hardin, R.H.; Tappert, F. Applications of the Split-Step Fourier Method to the Numerical Solution of Nonlinear and Variable Coefficient Wave Equations. SIAM Rev. (Chron.) 1973, 15, 423. [Google Scholar]
- Feng, G.; Huang, J.; Yi, M. General Formulas of Effective Earth Radius and Modified Refractive Index. IEEE Access 2021, 9, 115068–115076. [Google Scholar] [CrossRef]
- Sprouse, C.R.; Awadallah, R.S. An Angle-Dependent Impedance Boundary Condition for the Split-Step Parabolic Equation Method. IEEE Trans. Antennas Propag. 2012, 60, 964–970. [Google Scholar] [CrossRef]
- Valtr, P.; Pechac, P. Domain Decomposition Algorithm for Complex Boundary Modeling Using the Fourier Split-Step Parabolic Equation. IEEE Antennas Wirel. Propag. Lett. 2007, 6, 152–155. [Google Scholar] [CrossRef]
- Apaydin, G.; Sevgi, L. MATLAB-Based FEM—Parabolic-Equation Tool for Path-Loss Calculations along Multi-Mixed-Terrain Paths. IEEE Antennas Propag. Mag. 2014, 56, 221–236. [Google Scholar] [CrossRef]
- Ozgun, O.; Apaydin, G.; Kuzuoglu, M.; Sevgi, L. PETOOL: MATLAB-Based One-Way and Two-Way Split-Step Parabolic Equation Tool for Radiowave Propagation over Variable Terrain. Comput. Phys. Commun. 2011, 182, 2638–2654. [Google Scholar] [CrossRef]
- NGA. Digital Terrain Elevation Data. Available online: https://www.nga.mil/ProductsServices/TopographicalTerrestrial/Pages/DigitalTerrainElevationData.aspx (accessed on 25 June 2017).
- ATTN. Performance Specification: Digital Terrain Elevation Data (DTED); National Imagery and Mapping Agency (ATTN), Doctrine and Force Development: Reston, VA, USA, 2000. [Google Scholar]
- Awadallah, R.S.; Gehman, J.Z.; Kuttler, J.R.; Newkirk, M.H. Effects of Lateral Terrain Variations on Tropospheric Radar Propagation. IEEE Trans. Antennas Propag. 2005, 53, 420–434. [Google Scholar] [CrossRef]
- Awadallah, R.S.; Gehman, J.Z.; Kuttler, J.R.; Newkirk, M.H. Modeling Radar Propagation in Three-Dimensional Environments. Johns Hopkins APL Tech. Dig. 2004, 25, 101–111. [Google Scholar]














Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kryk, M.; Malon, K.; Kelner, J.M. Propagation Attenuation Maps Based on Parabolic Equation Method. Sensors 2022, 22, 4063. https://doi.org/10.3390/s22114063
Kryk M, Malon K, Kelner JM. Propagation Attenuation Maps Based on Parabolic Equation Method. Sensors. 2022; 22(11):4063. https://doi.org/10.3390/s22114063
Chicago/Turabian StyleKryk, Michał, Krzysztof Malon, and Jan M. Kelner. 2022. "Propagation Attenuation Maps Based on Parabolic Equation Method" Sensors 22, no. 11: 4063. https://doi.org/10.3390/s22114063
APA StyleKryk, M., Malon, K., & Kelner, J. M. (2022). Propagation Attenuation Maps Based on Parabolic Equation Method. Sensors, 22(11), 4063. https://doi.org/10.3390/s22114063