
Micro-Expression Recognition Based on Optical Flow and PCANet+


Abstract
:1. Introduction
- We propose a lightweight OF-PCANet+ method for ME recognition, which is computationally simple and which can meanwhile produce promising recognition performance.
- We present a spatiotemporal feature learning strategy for ME recognition. Discriminative spatiotemporal features can be learned automatically by feeding stacked optical flow sequences into the PCANet+ network.
2. Preliminaries
2.1. Optical Flow
2.2. PCANet
2.3. PCANet+
3. Method
3.1. Dense Optical Flow Calculation and Multi-Channel Stacking
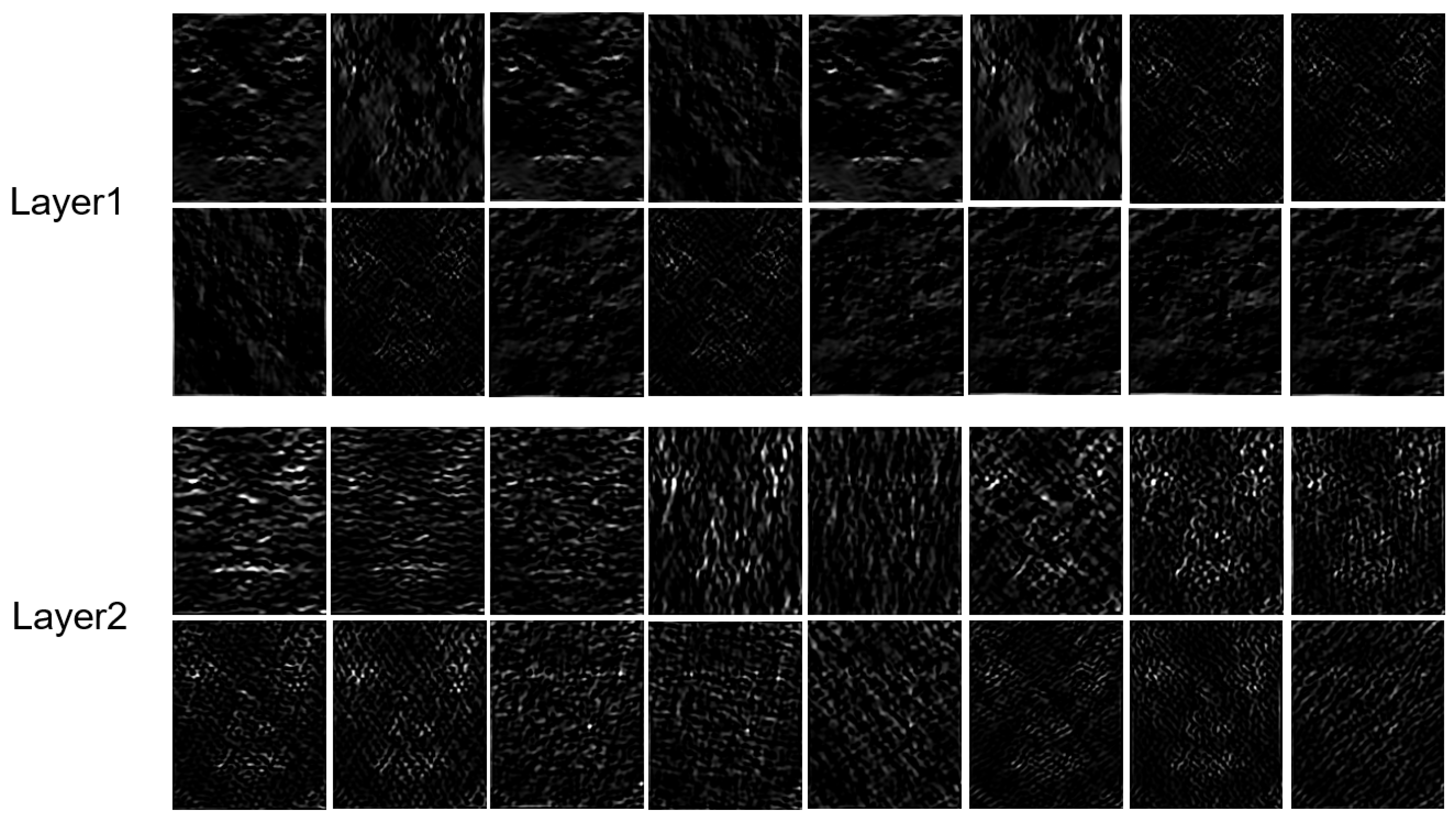
3.2. Feature Extraction with PCANet+
4. Experimental Results and Analysis
4.1. Settings
4.2. Effects of Parameters in PCANet+
4.2.1. The Number of Frames in Stacking
4.2.2. The Size and Number of Filters in Each Layer
4.3. Comparison with Other Methods
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Bhushan, B. Study of Facial Micro-expressions in Psychology. In Understanding Facial Expressions in Communication: Cross-Cultural and Multidisciplinary Perspectives; Springer: New Delhi, India, 2015; pp. 265–286. [Google Scholar]
- Shen, X.; Wu, Q.; Fu, X. Effects of the duration of expressions on the recognition of microexpressions. J. Zhejiang Univ. Sci. B 2012, 13, 221–230. [Google Scholar] [CrossRef] [PubMed]
- Yan, W.J.; Wu, Q.; Liang, J.; Chen, Y.H.; Fu, X. How Fast are the Leaked Facial Expressions: The Duration of Micro-Expressions. J. Nonverbal Behav. 2013, 37, 217–230. [Google Scholar] [CrossRef]
- Xu, F.; Zhang, J. Facial Microexpression Recognition: A Survey. Acta Autom. Sin. 2017, 43, 333–348. [Google Scholar]
- Ekman, P.; Friesen, W.V. Nonverbal Leakage and Clues to Deception. Psychiatry 1969, 32, 88–106. [Google Scholar] [CrossRef] [PubMed]
- Ekman, P. Lie Catching and Micro Expressions. In The Philosophy of Deception; Martin, C., Ed.; Oxford University Press: Oxford, UK, 2009; pp. 118–133. [Google Scholar]
- O’Sullivan, M.; Frank, M.; Hurley, C.; Tiwana, J. Police Lie Detection Accuracy: The Effect of Lie Scenario. Law Hum. Behav. 2009, 33, 530. [Google Scholar] [CrossRef] [PubMed]
- Corneanu, C.A.; Simón, M.O.; Cohn, J.F.; Guerrero, S.E. Survey on RGB, 3D, Thermal, and Multimodal Approaches for Facial Expression Recognition: History, Trends, and Affect-Related Applications. IEEE Trans. Pattern Anal. Mach. Intell. 2016, 38, 1548–1568. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Li, Y.; Huang, X.; Zhao, G. Joint Local and Global Information Learning with Single Apex Frame Detection for Micro-Expression Recognition. IEEE Trans. Image Process. 2021, 30, 249–263. [Google Scholar] [CrossRef] [PubMed]
- Warren, G.; Schertler, E.; Bull, P. Detecting Deception from Emotional and Unemotional Cues. J. Nonverbal Behav. 2009, 33, 59–69. [Google Scholar] [CrossRef]
- Yan, W.J.; Wang, S.J.; Liu, Y.J.; Wu, Q.; Fu, X. For micro-expression recognition: Database and suggestions. Neurocomputing 2014, 136, 82–87. [Google Scholar] [CrossRef] [Green Version]
- Li, X.; Pfister, T.; Huang, X.; Zhao, G.; Pietikäinen, M. A Spontaneous Micro-expression Database: Inducement, collection and baseline. In Proceedings of the 10th IEEE International Conference and Workshops on Automatic Face and Gesture Recognition, Shanghai, China, 22–26 April 2013; pp. 1–6. [Google Scholar]
- Pfister, T.; Li, X.; Zhao, G.; Pietikäinen, M. Recognising spontaneous facial micro-expressions. In Proceedings of the International Conference on Computer Vision, Washington, DC, USA, 6–13 November 2011; pp. 1449–1456. [Google Scholar]
- Zhao, G.; Pietikainen, M. Dynamic Texture Recognition Using Local Binary Patterns with an Application to Facial Expressions. IEEE Trans. Pattern Anal. Mach. Intell. 2007, 29, 915–928. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yan, W.J.; Li, X.; Wang, S.J.; Zhao, G.; Liu, Y.J.; Chen, Y.H.; Fu, X. CASME II: An Improved Spontaneous Micro-Expression Database and the Baseline Evaluation. PLoS ONE 2014, 9, e86041. [Google Scholar] [CrossRef] [PubMed]
- Huang, X.; Zhao, G.; Hong, X.; Pietikäinen, M.; Zheng, W. Texture Description with Completed Local Quantized Patterns. In Proceedings of the Scandinavian Conference on Image Analysis, Espoo, Finland, 17–20 June 2013; pp. 1–10. [Google Scholar]
- Wang, Y.; See, J.; Phan, R.C.W.; Oh, Y.H. LBP with Six Intersection Points: Reducing Redundant Information in LBP-TOP for Micro-expression Recognition. In Proceedings of the Asia Conference on Computer Vision 2014, Singapore, 1–5 November 2014; Springer International Publishing: Cham, Switzerland, 2015; pp. 525–537. [Google Scholar]
- Huang, X.; Wang, S.; Zhao, G.; Piteikainen, M. Facial Micro-Expression Recognition Using Spatiotemporal Local Binary Pattern with Integral Projection. In Proceedings of the IEEE International Conference on Computer Vision Workshop, Santiago, Chile, 7–13 December 2015; pp. 1–9. [Google Scholar]
- Zong, Y.; Huang, X.; Zheng, W.; Cui, Z.; Zhao, G. Learning From Hierarchical Spatiotemporal Descriptors for Micro-Expression Recognition. IEEE Trans. Multimed. 2018, 20, 3160–3172. [Google Scholar] [CrossRef] [Green Version]
- Lu, Z.; Luo, Z.; Zheng, H.; Chen, J.; Li, W. A Delaunay-Based Temporal Coding Model for Micro-expression Recognition. In Proceedings of the Asia Conference on Computer Vision, Singapore, 1–5 November 2014; pp. 698–711. [Google Scholar]
- Xu, F.; Zhang, J.; Wang, J.Z. Microexpression Identification and Categorization Using a Facial Dynamics Map. IEEE Trans. Affect. Comput. 2017, 8, 254–267. [Google Scholar] [CrossRef]
- Liu, Y.J.; Zhang, J.K.; Yan, W.J.; Wang, S.J.; Zhao, G.; Fu, X. A Main Directional Mean Optical Flow Feature for Spontaneous Micro-Expression Recognition. IEEE Trans. Affect. Comput. 2016, 7, 299–310. [Google Scholar] [CrossRef]
- Liong, S.T.; See, J.; Phan, R.C.W.; Oh, Y.H.; Cat Le Ngo, A.; Wong, K.; Tan, S.W. Spontaneous subtle expression detection and recognition based on facial strain. Signal Process. Image Commun. 2016, 47, 170–182. [Google Scholar] [CrossRef] [Green Version]
- Kim, D.H.; Baddar, W.J.; Ro, Y.M. Micro-Expression Recognition with Expression-State Constrained Spatio-Temporal Feature Representations. In Proceedings of the 24th ACM International Conference on Multimedia, New York, NY, USA, 15–19 October 2016; pp. 382–386. [Google Scholar]
- Peng, M.; Wang, C.; Chen, T.; Liu, G.; Fu, X. Dual Temporal Scale Convolutional Neural Network for Micro-Expression Recognition. Front. Psychol. 2017, 8, 1745. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.; Huang, X.; Zhao, G. Can Micro-Expression be Recognized Based on Single Apex Frame? In Proceedings of the 2018 25th IEEE International Conference on Image Processing (ICIP), Athens, Greece, 7–10 October 2018; pp. 3094–3098. [Google Scholar]
- Khor, H.Q.; See, J.; Phan, R.C.W.; Lin, W. Enriched Long-Term Recurrent Convolutional Network for Facial Micro-Expression Recognition. In Proceedings of the 2018 13th IEEE International Conference on Automatic Face Gesture Recognition (FG 2018), Xi’an, China, 15–19 May 2018; pp. 667–674. [Google Scholar]
- Li, J.; Wang, Y.; See, J.; Liu, W. Micro-expression recognition based on 3D flow convolutional neural network. Pattern Anal. Appl. 2019, 22, 1331–1339. [Google Scholar] [CrossRef]
- Low, C.Y.; Teoh, A.B.J.; Toh, K.A. Stacking PCANet+: An Overly Simplified ConvNets Baseline for Face Recognition. IEEE Signal Process. Lett. 2017, 24, 1581–1585. [Google Scholar] [CrossRef]
- Chan, T.H.; Jia, K.; Gao, S.; Lu, J.; Zeng, Z.; Ma, Y. PCANet: A Simple Deep Learning Baseline for Image Classification. IEEE Trans. Image Process. 2015, 24, 5017–5032. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Garg, R.; Roussos, A.; Agapito, L. Robust Trajectory-Space TV-L1 Optical Flow for Non-rigid Sequences. In Proceedings of the Energy Minimization Methods in Computer Vision and Pattern Recognition, Petersburg, Russia, 25–27 July 2011; pp. 300–314. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable Symbol | Description |
|---|---|
| A D-dimensional real vector. | |
| i-th element of vector a. | |
| A 2-dimensional real matrix with N rows and M columns. | |
| A 3-dimensional real matrix with size of . | |
| A clipped matrix of , where . | |
| A set. | |
| Size of the set . |
| Dataset | SMIC-HS | CASME2 |
|---|---|---|
| Subjects | 16 | 26 |
| Sample | 164 | 247 |
| Year | 2013 | 2014 |
| Frame Rate | 100 | 200 |
| Image Resolution | 640 × 480 | 640 × 480 |
| Emotion classes | 5 categories: | |
| 3 categories: | happiness (32) | |
| positive (51) | surprise (25) | |
| negative (70) | disgust (64) | |
| surprise (43) | repression (27) | |
| others (99) |
| Frame Stacking Number T | SMIC | CASME2 | ||||
|---|---|---|---|---|---|---|
| Accuracy | Macro-F1 | Macro-Recall | Accuracy | Macro-F1 | Macro-Recall | |
| 1 | 0.4268 | 0.3924 | 0.3890 | 0.2301 | 0.2437 | 0.2316 |
| 3 | 0.6159 | 0.6184 | 0.6214 | 0.4959 | 0.4960 | 0.4786 |
| 5 | 0.6280 | 0.6309 | 0.6369 | 0.5203 | 0.5266 | 0.5148 |
| 7 | 0.6098 | 0.6109 | 0.6131 | 0.4512 | 0.4412 | 0.4270 |
| SMIC | CASME2 | |||||
|---|---|---|---|---|---|---|
| Accuracy | Macro-F1 | Macro-Recall | Accuracy | Macro-F1 | Macro-Recall | |
| 0.5854 | 0.5893 | 0.5941 | 0.5000 | 0.5122 | 0.4962 | |
| 0.5854 | 0.5880 | 0.5941 | 0.5041 | 0.5047 | 0.4950 | |
| 0.5915 | 0.5954 | 0.6036 | 0.5081 | 0.5114 | 0.5020 | |
| 0.5793 | 0.5834 | 0.5905 | 0.5163 | 0.5198 | 0.5055 | |
| 0.6098 | 0.6127 | 0.6173 | 0.5285 | 0.5272 | 0.5031 | |
| 0.5976 | 0.6010 | 0.6084 | 0.5122 | 0.5128 | 0.4950 | |
| 0.6098 | 0.6137 | 0.6209 | 0.5041 | 0.5081 | 0.4867 | |
| 0.6280 | 0.6309 | 0.6369 | 0.5203 | 0.5266 | 0.5148 | |
| 0.6037 | 0.6046 | 0.6096 | 0.5325 | 0.5493 | 0.5241 | |
| 0.6037 | 0.6053 | 0.6126 | 0.5285 | 0.5280 | 0.5067 | |
| 0.5976 | 0.6007 | 0.6048 | 0.4919 | 0.4931 | 0.4724 | |
| 0.6220 | 0.6247 | 0.6310 | 0.5081 | 0.5152 | 0.4931 | |
| 0.5915 | 0.5943 | 0.6001 | 0.4268 | 0.4096 | 0.4096 | |
| 0.6098 | 0.6131 | 0.6167 | 0.4350 | 0.4250 | 0.4250 | |
| Best Configuration For SMIC | Best Configuration For CASME2 | |
|---|---|---|
| Str. 1, Pad. 3 | Str. 1, Pad. 3 | |
| Pool-1 | Mean Pooling, Str. 1 | Mean Pooling, Str. 1 |
| Str. 1, Pad. 4 | Str. 1, Pad. 3 |
| Method | SMIC | CASME2 | ||||
|---|---|---|---|---|---|---|
| Accuracy | Macro-F1 | Macro-Recall | Accuracy | Macro-F1 | Macro-Recall | |
| LBP-TOP [15] | 0.4207 | 0.4266 | 0.4429 | 0.4390 | 0.4297 | 0.4259 |
| STLBP-IP [18] | 0.4329 | 0.4270 | 0.4241 | 0.4173 | 0.4026 | 0.4282 |
| KGSL [19] | 0.5244 | 0.4937 | 0.5162 | 0.4575 | 0.4325 | 0.4437 |
| ELRCN [27] | N/A | N/A | N/A | 0.5244 | 0.5000 | 0.4396 |
| 3D-FCNN [28] | 0.5549 | N/A | N/A | 0.5911 | N/A | N/A |
| OF-PCANet+ | 0.6280 | 0.6309 | 0.6369 | 0.5325 | 0.5493 | 0.5241 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, S.; Guan, S.; Lin, H.; Huang, J.; Long, F.; Yao, J. Micro-Expression Recognition Based on Optical Flow and PCANet+. Sensors 2022, 22, 4296. https://doi.org/10.3390/s22114296
Wang S, Guan S, Lin H, Huang J, Long F, Yao J. Micro-Expression Recognition Based on Optical Flow and PCANet+. Sensors. 2022; 22(11):4296. https://doi.org/10.3390/s22114296
Chicago/Turabian StyleWang, Shiqi, Suen Guan, Hui Lin, Jianming Huang, Fei Long, and Junfeng Yao. 2022. "Micro-Expression Recognition Based on Optical Flow and PCANet+" Sensors 22, no. 11: 4296. https://doi.org/10.3390/s22114296
APA StyleWang, S., Guan, S., Lin, H., Huang, J., Long, F., & Yao, J. (2022). Micro-Expression Recognition Based on Optical Flow and PCANet+. Sensors, 22(11), 4296. https://doi.org/10.3390/s22114296