
Urban Seismic Network Based on MEMS Sensors: The Experience of the Seismic Observatory in Camerino (Marche, Italy)

 ,
,  ,
,  ,
,  and
and
Abstract
:1. Introduction
2. MEMS Stations
3. Sensor Validation
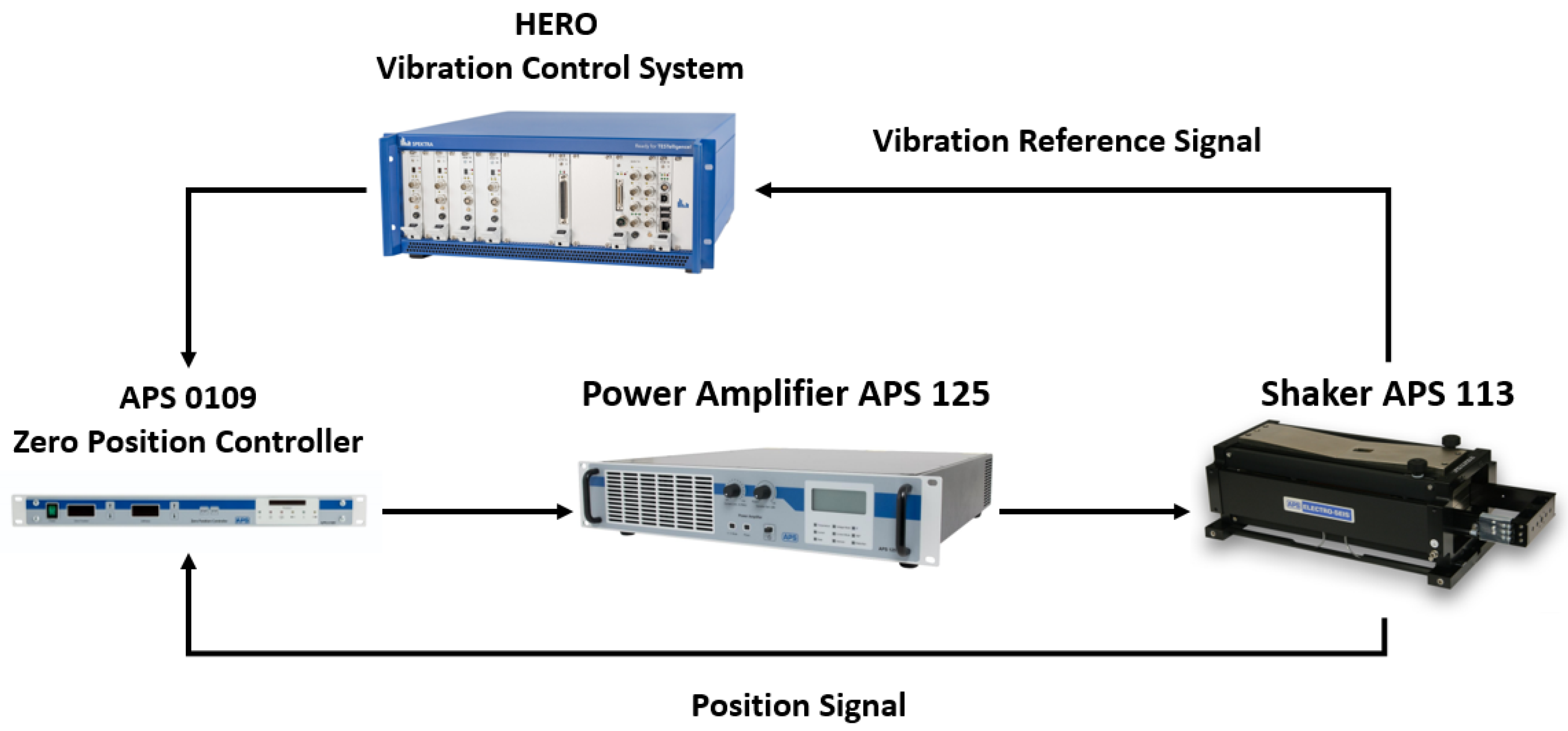
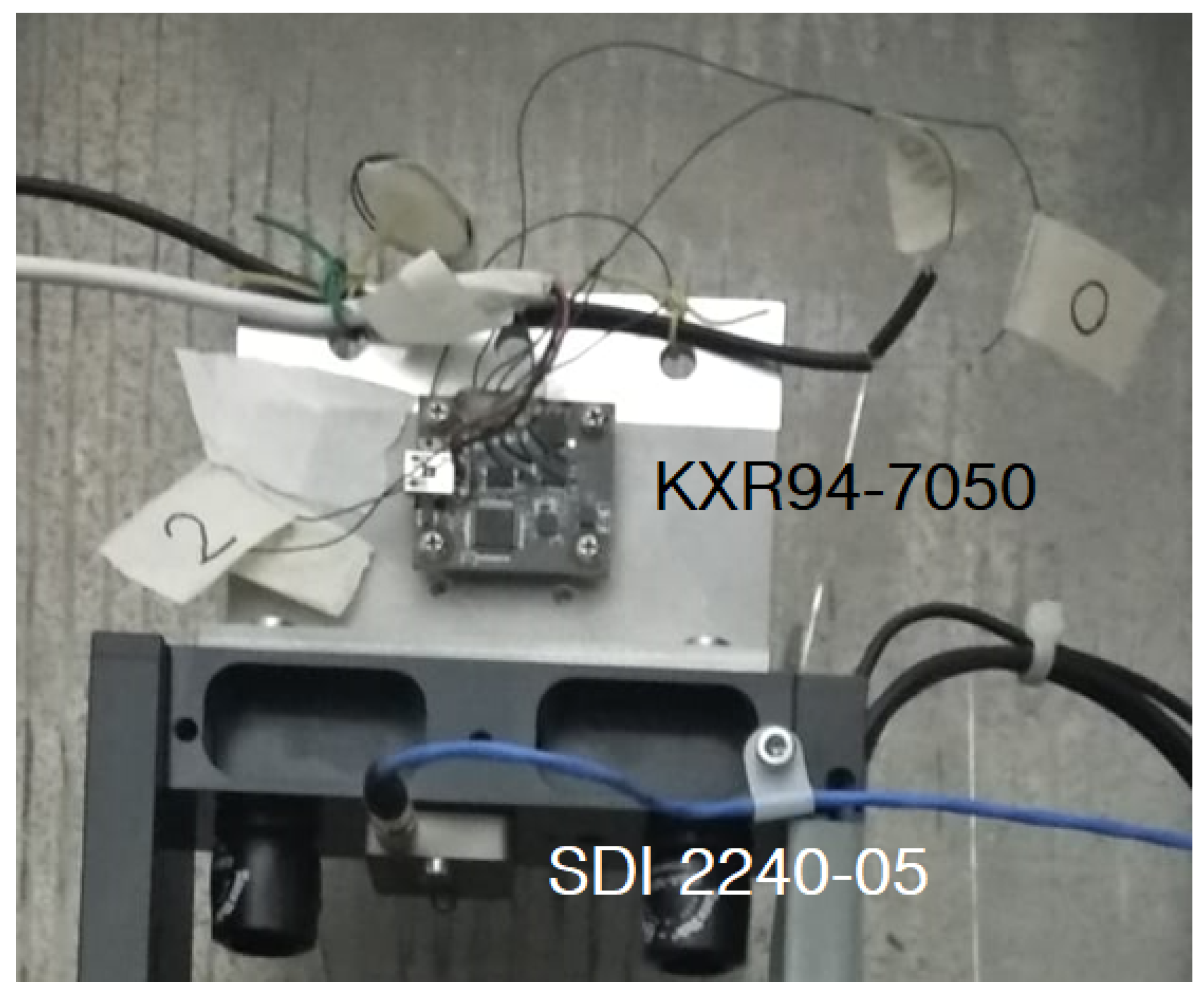
3.1. Calibration System
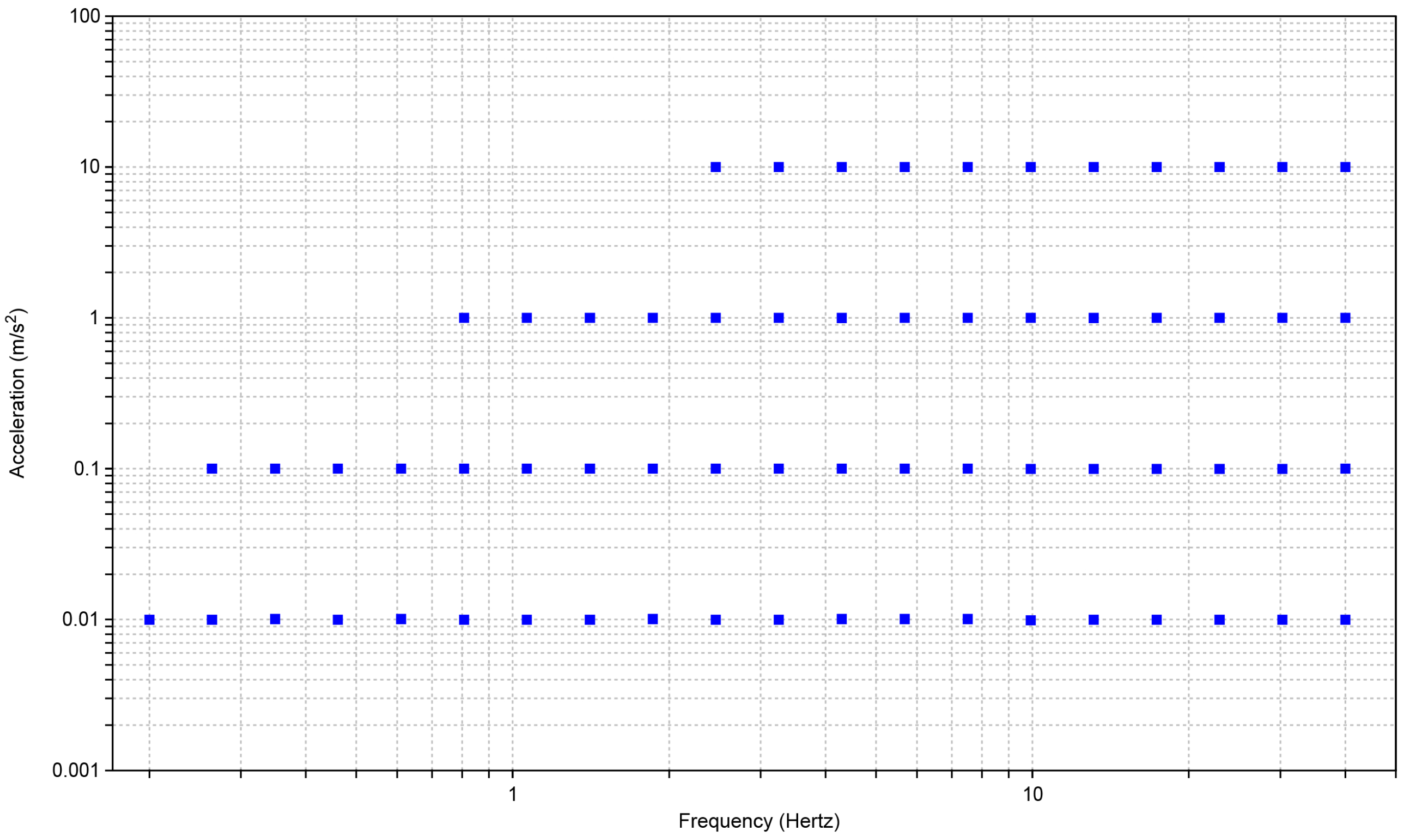
3.2. Test Protocol
4. Innovative Distributed Computing for Statistical Earthquake Detection Algorithm
- id,ip,port,lat,lon
- STA00,147.163.105.70,3389,43.141968,13.071459
- STA01,147.163.105.76,3389,43.129766,13.066322
- STA02,147.163.105.75,3389,43.137409,13.061813
- The number of stations triggering exceeds a threshold value (for example, 80% of stations)
- Station triggers must fall within a certain empirical time (for example, ~15 s)
5. The Monitoring Network
6. Camerino Network
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| USN | Urban Seismic Network |
| PGA | Peak Ground Acceleration |
| SHM | Shake Map |
| OE | Observatory Earthquake |
| STD | Standard Deviation |
| LTE | Long-Term Evolution |
| UPS | Uninterruptible Power Supply |
| GPS | Global Position System |
| PPS | Pulsations Per Second |
| ADC | Analog to Digital Converter |
| M2M | Machine to Machine |
| NAT | Network Address Translation |
References
- D’Alessandro, A.; Costanzo, A.; Ladina, C.; Buongiorno, F.; Cattaneo, M.; Falcone, S.; La Piana, C.; Marzorati, S.; Scudero, S.; Vitale, G.; et al. Urban Seismic Networks, Structural Health and Cultural Heritage Monitoring: The National Earthquakes Observatory (INGV, Italy) Experience. Front. Built Environ. 2019, 5, 127. [Google Scholar] [CrossRef] [Green Version]
- Satriano, C.; Wu, Y.M.; Zollo, A.; Kanamori, H. Earthquake early warning: Concepts, methods and physical grounds. Soil Dyn. Earthq. Eng. 2011, 31, 106–118. [Google Scholar] [CrossRef]
- Costanzo, A.; Falcone, S.; D’Alessandro, A.; Vitale, G.; Giovinazzi, S.; Morici, M.; Dall’Asta, A.; Buongiorno, M.F. A Technological System for Post-Earthquake Damage Scenarios Based on the Monitoring by Means of an Urban Seismic Network. Sensors 2021, 21, 7887. [Google Scholar] [CrossRef] [PubMed]
- Cochran, E.S.; Lawrence, J.F.; Christensen, C.; Jakka, R.S. The quake-catcher network: Citizen science expanding seismic horizons. Seismol. Res. Lett. 2009, 80, 26–30. [Google Scholar] [CrossRef]
- Horiuchi, S.; Horiuchi, Y.; Yamamoto, S.; Nakamura, H.; Wu, C.; Rydelek, P.A.; Kachi, M. Home seismometer for earthquake early warning. Geophys. Res. Lett. 2009, 36, L00B04. [Google Scholar] [CrossRef] [Green Version]
- Chung, A.; Neighbors, C.; Belmonte, A.; Miller, M.; Sepulveda, H.H.; Christensen, C.; Jakka, R.S.; Cochran, E.; Lawrence, J. The Quake-Catcher Network rapid aftershock mobilization program following the 2010 M 8.8 Maule, Chile earthquake. Seismol. Res. Lett. 2011, 82, 526–532. [Google Scholar] [CrossRef]
- Clayton, R.; Heaton, T.; Chandy, M.; Krause, A.; Kohler, M.; Bunn, J.; Guy, R.; Olson, M.; Faulkner, M.; Cheng, M.; et al. Community seismic network. Ann. Geophys. 2011, 54, 738–747. [Google Scholar]
- Clayton, R.W.; Heaton, T.; Kohler, M.; Chandy, M.; Guy, R.; Bunn, J. Community seismic network: A dense array to sense earthquake strong motion. Seismol. Res. Lett. 2015, 86, 1354–1363. [Google Scholar] [CrossRef] [Green Version]
- Kohler, M.D.; Heaton, T.H.; Cheng, M.H. The Community Seismic Network and Quake-Catcher Network: Enabling structural health monitoring through instrumentation by community participants. In Sensors and Smart Structures Technologies for Civil, Mechanical, and Aerospace Systems 2013; International Society for Optics and Photonics: Bellingham, WA, USA, 2013; Volume 8692, p. 86923X. [Google Scholar]
- Kohler, M.; Heaton, T.; Cheng, M.; Singh, P. Structural Health Monitoring through Dense Instrumentation by Community Participants: The Community Seismic Network and Quake-Catcher Network. In Proceedings of the 10th National Conference on Earthquake Engineering, Anchorage, AK, USA, 21–25 July 2014. [Google Scholar]
- Kohler, M.; Guy, R.; Bunn, J.; Massari, A.; Clayton, R.; Heaton, T.; Chandy, K.; Ebrahimian, H.; Dorn, C. Community seismic network and localized earthquake situational awareness. In Proceedings of the Eleventh U.S. National Conference on Earthquake Engineering, Los Angeles, CA, USA, 25–29 June 2018. [Google Scholar]
- Nof, R.N.; Chung, A.I.; Rademacher, H.; Dengler, L.; Allen, R.M. MEMS Accelerometer Mini-Array (MAMA): A low-cost implementation for earthquake early warning enhancement. Earthq. Spectra 2019, 35, 21–38. [Google Scholar] [CrossRef]
- D’Alessandro, A.; D’Anna, G. Suitability of Low-Cost Three-Axis MEMS Accelerometers in Strong-Motion Seismology: Tests on the LIS331DLH (iPhone) Accelerometer. Bull. Seismol. Soc. Am. 2013, 103, 2906–2913. [Google Scholar] [CrossRef]
- D’Alessandro, A.; Scudero, S.; Vitale, G. A Review of the Capacitive MEMS for Seismology. Sensors 2019, 19, 3093. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bravo-Haro, M.; Ding, X.; Elghazouli, A. MEMS-based low-cost and open-source accelerograph for earthquake strong-motion. Eng. Struct. 2021, 230, 111675. [Google Scholar] [CrossRef]
- De Guidi, G.; Vecchio, A.; Brighenti, F.; Caputo, R.; Carnemolla, F.; Di Pietro, A.; Lupo, M.; Maggini, M.; Marchese, S.; Messina, D.; et al. Brief communication: Co-seismic displacement on 26 and 30 October 2016 (Mw Combining double low line 5.9 and 6.5)-earthquakes in central Italy from the analysis of a local GNSS network. Nat. Hazards Earth Syst. Sci. 2017, 17, 1885–1892. [Google Scholar] [CrossRef] [Green Version]
- Pondrelli, S.; Visini, F.; Rovida, A.; D’Amico, V.; Pace, B.; Meletti, C. Style of faulting of expected earthquakes in Italy as an input for seismic hazard modeling. Nat. Hazards Earth Syst. Sci. 2020, 20, 3577–3592. [Google Scholar] [CrossRef]
- DISS Working Group. Database of Individual Seismogenic Sources (DISS), Version 3.3.0: A Compilation of Potential Sources for Earthquakes Larger Than M 5.5 in Italy and Surrounding Areas; Istituto Nazionale di Geofisica e Vulcanologia (INGV): Rome, Italy, 2021. [CrossRef]
- Giovinazzi, S.; Marchili, C.; Di Pietro, A.; Giordano, L.; Costanzo, A.; La Porta, L.; Pollino, M.; Rosato, V.; Lückerath, D.; Milde, K.; et al. Assessing Earthquake Impacts and Monitoring Resilience of Historic Areas: Methods for GIS Tools. ISPRS Int. J. Geo-Inf. 2021, 10, 461. [Google Scholar] [CrossRef]
- D’Alessandro, A.; Greco, L.; Scudero, S.; Siino, M.; Vitale, G.; D’Anna, R.; Gangi, F.; Nicolosi, D.; Passafiume, G.; Speciale, S.; et al. Development of a low-cost seismic station based on MEMS technology [Sviluppo di una stazione sismica low-cost basata su tecnologia MEMS]. Quad. Di Geofis. 2019, 2019, 1–60. [Google Scholar]
- Ahern, T.; Casey, R.; Barnes, D.; Benson, R.; Knight, T. Seed Standard for the Exchange of Earthquake Data Reference Manual Format Version 2.4; Incorporated Research Institutions for Seismology (IRIS): Seattle, WA, USA, 2007. [Google Scholar]
- Allen, R.V. Automatic earthquake recognition and timing from single traces. Bull. Seismol. Soc. Am. 1978, 60, 1521–1532. [Google Scholar] [CrossRef]
- Helmholtz Centre Potsdam GFZ German Research Centre for Geosciences and gempa GmbH. The SeisComP seismological software package. GFZ Data Serv. 2008. [Google Scholar] [CrossRef]
- Costanzo, A. Shaking Maps Based on Cumulative Absolute Velocity and Arias Intensity: The Cases of the Two Strongest Earthquakes of the 2016–2017 Central Italy Seismic Sequence. ISPRS Int. J. Geo-Inf. 2018, 7, 244. [Google Scholar] [CrossRef] [Green Version]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Accelerometer Characteristics | |
|---|---|
| Acceleration Measurement Max | g |
| Acceleration Measurement Resolution | 76.3 μg |
| Acceleration Bandwidth | 497 Hz |
| Acceleration White Noise | 300 μg |
| Acceleration Minimum Drift | 37 μg |
| Acceleration Optimal Averaging Period | 1037 s |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vitale, G.; D’Alessandro, A.; Di Benedetto, A.; Figlioli, A.; Costanzo, A.; Speciale, S.; Piattoni, Q.; Cipriani, L. Urban Seismic Network Based on MEMS Sensors: The Experience of the Seismic Observatory in Camerino (Marche, Italy). Sensors 2022, 22, 4335. https://doi.org/10.3390/s22124335
Vitale G, D’Alessandro A, Di Benedetto A, Figlioli A, Costanzo A, Speciale S, Piattoni Q, Cipriani L. Urban Seismic Network Based on MEMS Sensors: The Experience of the Seismic Observatory in Camerino (Marche, Italy). Sensors. 2022; 22(12):4335. https://doi.org/10.3390/s22124335
Chicago/Turabian StyleVitale, Giovanni, Antonino D’Alessandro, Andrea Di Benedetto, Anna Figlioli, Antonio Costanzo, Stefano Speciale, Quintilio Piattoni, and Leonardo Cipriani. 2022. "Urban Seismic Network Based on MEMS Sensors: The Experience of the Seismic Observatory in Camerino (Marche, Italy)" Sensors 22, no. 12: 4335. https://doi.org/10.3390/s22124335