
Design Methodology of Automotive Time-Sensitive Network System Based on OMNeT++ Simulation System

 ,
,
Abstract
:1. Introduction
- The correspondence between traffic types and automotive scenarios is discussed to meet different scheduling requirements.
- The critical parameters and procedures in the TSN design process are pointed out, and the core design goals of the automotive TSN communication system are determined.
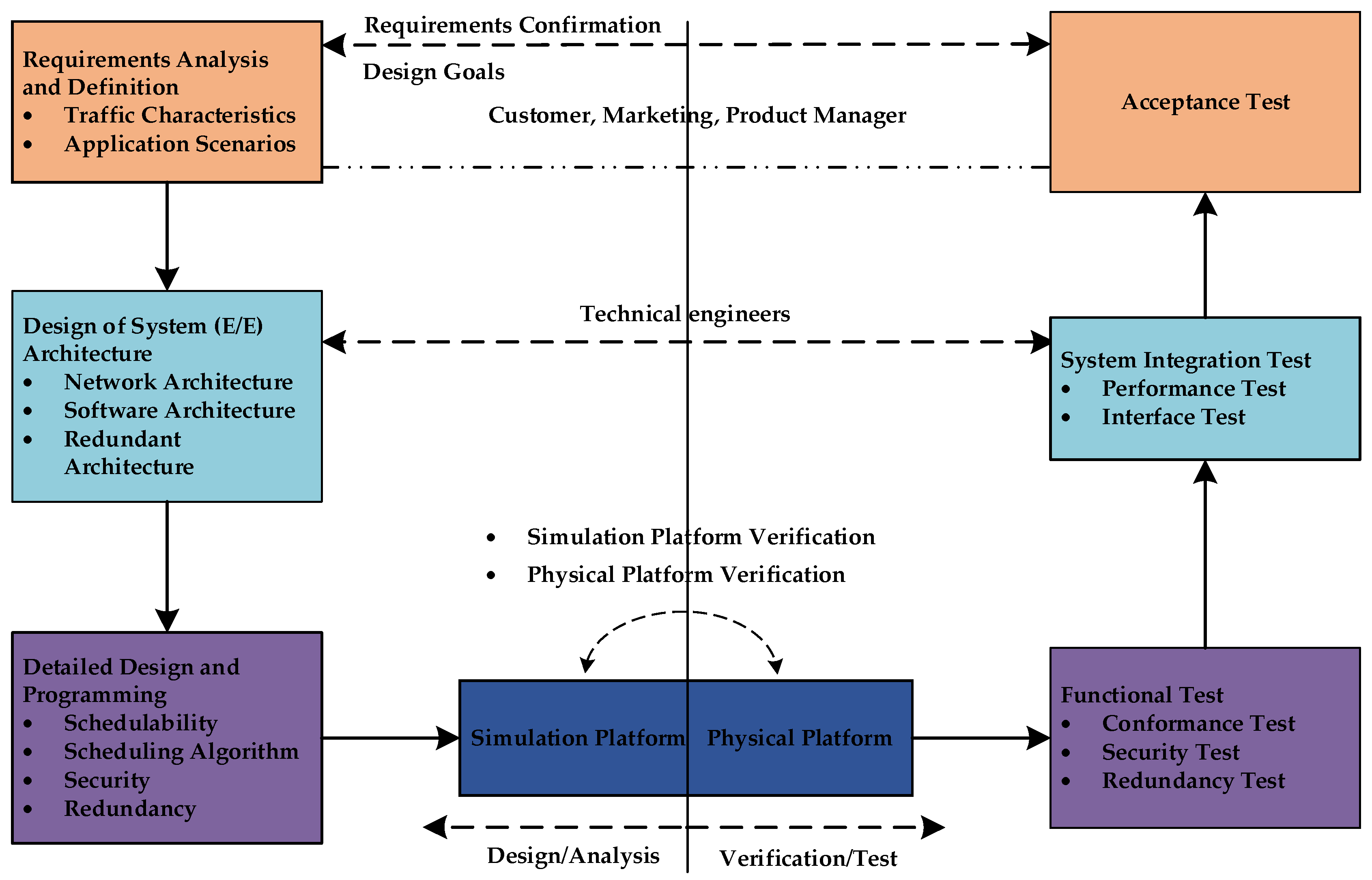
- A methodology for designing and developing the automotive TSN communication system is proposed.
- A complete systematic automotive TSN simulation system is designed to analyze the performance with single or mixed TSN scheduling mechanisms and algorithms.
- The performance of a complex automotive scenario based on zonal architecture provided by a major motor company in Shanghai is studied through the complete systematic automotive TSN simulation system.
2. Related Works
3. Methodology
4. Application Scenario
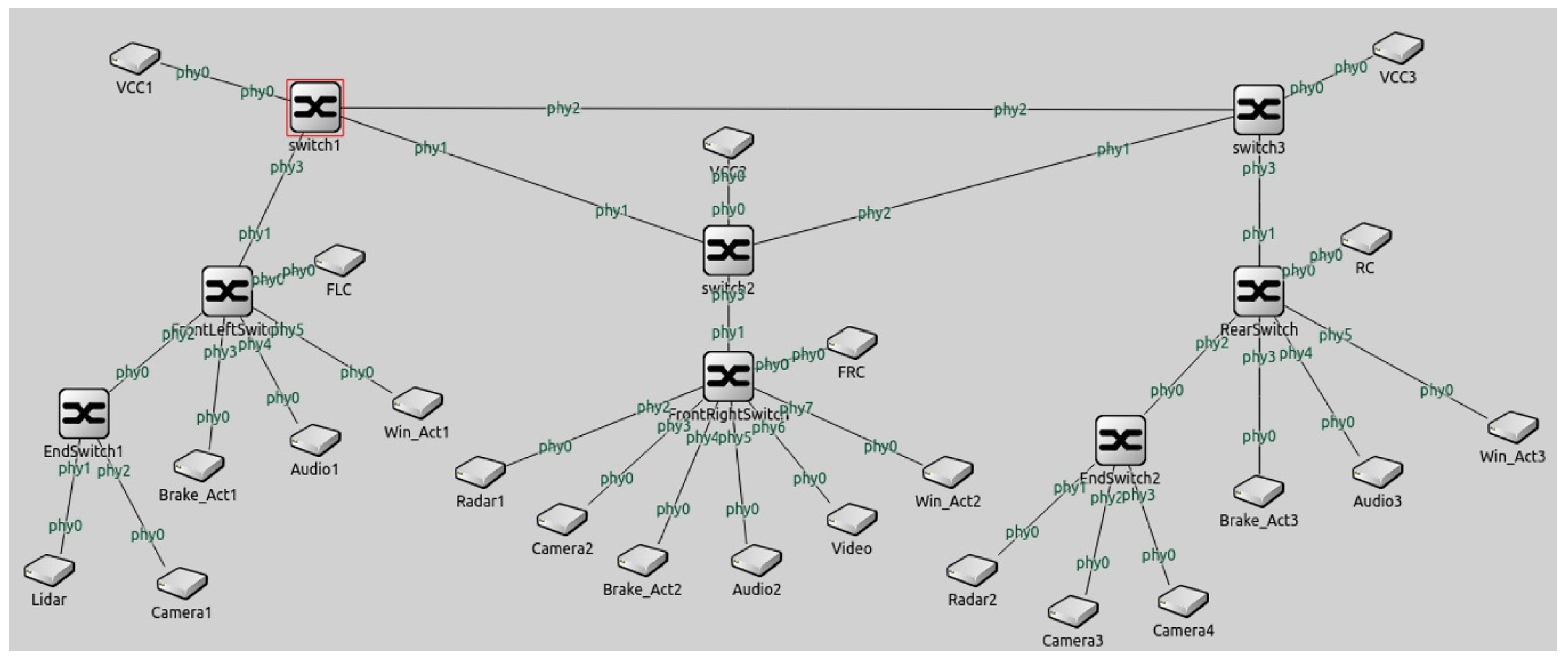
4.1. Simulation System
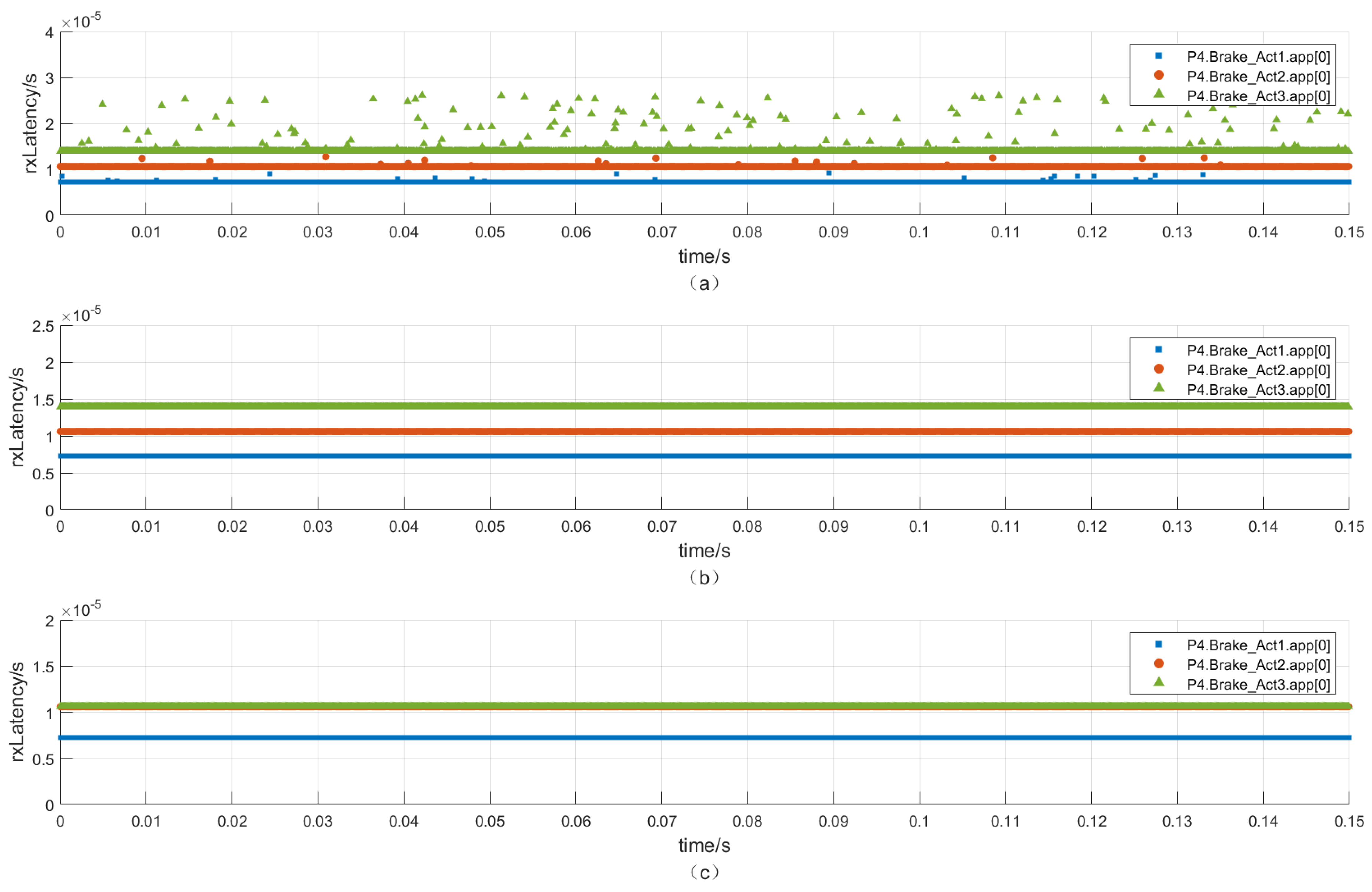
4.2. Use Case
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Hank, P.; Suermann, T.; Müller, S. Automotive Ethernet, a holistic approach for a next generation in-vehicle networking standard. In Advanced Microsystems for Automotive Applications; Springer: Berlin/Heidelberg, Germany, 2012; pp. 79–89. [Google Scholar]
- Samii, S.; Zinner, H. Level 5 by layer 2: Time-sensitive networking for autonomous vehicles. IEEE Commun. Stand. Mag. 2018, 2, 62–68. [Google Scholar] [CrossRef]
- Draft Standard for Local and Metropolitan Area Networks: Time-Sensitive Networking for Aerospace Onboard Ethernet Communications. Available online: https://1.ieee802.org/tsn/802-1dp/ (accessed on 20 April 2022).
- Bello, L.L.; Steiner, W. A perspective on IEEE time-sensitive networking for industrial communication and automation systems. Proc. IEEE 2019, 107, 1094–1120. [Google Scholar] [CrossRef]
- Bello, L.L.; Mariani, R.; Mubeen, S.; Saponara, S. Recent advances and trends in on-board embedded and networked automotive systems. IEEE Trans. Ind. Inform. 2018, 15, 1038–1051. [Google Scholar] [CrossRef]
- Sha, L.; Abdelzaher, T.; Cervin, A.; Baker, T.; Burns, A.; Buttazzo, G.; Caccamo, M.; Lehoczky, J.; Mok, A.K. Real time scheduling theory: A historical perspective. Real Time Syst. 2004, 28, 101–155. [Google Scholar] [CrossRef]
- Feiertag, N.; Richter, K.; Nordlander, J.; Jonsson, J. A compositional framework for end-to-end path delay calculation of automotive systems under different path semantics. In Proceedings of the IEEE Real-Time Systems Symposium, Washington, DC, USA, 30 November–3 December 2009. [Google Scholar]
- Becker, M.; Dasari, D.; Mubeen, S.; Behnam, M.; Nolte, T. End-to-end timing analysis of cause-effect chains in automotive embedded systems. J. Syst. Archit. 2017, 80, 104–113. [Google Scholar] [CrossRef]
- IEEE Std 802.1Qav-2009; IEEE Standard for Local and Metropolitan Area Networks-Virtual Bridged Local Area Networks Amendment 12: Forwarding and Queuing Enhancements for Time-Sensitive Streams. (Amendment to IEEE Std 802.1Q-2005). IEEE: New York, NY, USA, 2010; p. C1-72. [CrossRef]
- IEEE Std 802.1 Qca-2015; IEEE Standard for Local and Metropolitan Area Networks—Bridges and Bridged Networks—Amendment 24: Path Control and Reservation. (Amendment to IEEE Std 802.1Q-2014 as amended by IEEE Std 802.1Qcd-2015 and IEEE Std 802.1Q-2014/Cor 1-2015). IEEE: New York, NY, USA, 2016; pp. 1–120. [CrossRef]
- IEEE Std 802.1 Qbv-2015; IEEE Standard for Local and Metropolitan Area Networks—Bridges and Bridged Networks—Amendment 25: Enhancements for Scheduled Traffic. (Amendment to IEEE Std 802.1Q-2014 as amended by IEEE Std 802.1Qca-2015, IEEE Std 802.1Qcd-2015, and IEEE Std 802.1Q-2014/Cor 1-2015). IEEE: New York, NY, USA, 2016; pp. 1–57. [CrossRef]
- IEEE Std 802.1 Qbu-2016; IEEE Standard for Local and Metropolitan Area Networks—Bridges and Bridged Networks—Amendment 26: Frame Preemption. (Amendment to IEEE Std 802.1Q-2014). IEEE: New York, NY, USA, 2016; pp. 1–52. [CrossRef]
- IEEE 802.1 Qch-2017; IEEE Standard for Local and Metropolitan Area Networks—Bridges and Bridged Networks—Amendment 29: Cyclic Queuing and Forwarding. (Amendment to IEEE Std 802.1Q-2014 as amended by IEEE Std 802.1Qca-2015, IEEE Std 802.1Qcd(TM)-2015, IEEE Std 802.1Q-2014/Cor 1-2015, IEEE Std 802.1Qbv-2015, IEEE Std 802.1Qbu-2016, IEEE Std 802.1Qbz-2016, and IEEE Std 802.1Qci-2017). IEEE: New York, NY, USA, 2017; pp. 1–30. [CrossRef]
- IEEE Std 802.1 Qci-2017; IEEE Standard for Local and Metropolitan Area Networks–Bridges and Bridged Networks—Amendment 28: Per-Stream Filtering and Policing. (Amendment to IEEE Std 802.1Q-2014 as amended by IEEE Std 802.1Qca-2015, IEEE Std 802.1Qcd-2015, IEEE Std 802.1Q-2014/Cor 1-2015, IEEE Std 802.1Qbv-2015, IEEE Std 802.1Qbu-2016, and IEEE Std 802.1Qbz-2016). IEEE: New York, NY, USA, 2017; pp. 1–65. [CrossRef]
- IEEE Std 802.1 CB-2017; IEEE Standard for Local and Metropolitan Area Networks–Frame Replication and Elimination for Reliability. IEEE: New York, NY, USA, 2017; pp. 1–102. [CrossRef]
- IEEE Std 802.1 Q-2018; IEEE Standard for Local and Metropolitan Area Networks—Bridges and Bridged Networks. (Revision of IEEE Std 802.1Q-2014). IEEE: New York, NY, USA, 2018; pp. 1–1993. [CrossRef]
- IEEE Std 802.1CM-2018; IEEE Standard for Local and Metropolitan Area Networks—Time-Sensitive Networking for Fronthaul. IEEE: New York, NY, USA, 2018; pp. 1–62. [CrossRef]
- IEEE Std 802.1 Qcc-2018; IEEE Standard for Local and Metropolitan Area Networks–Bridges and Bridged Networks—Amendment 31: Stream Reservation Protocol (SRP) Enhancements and Performance Improvements. (Amendment to IEEE Std 802.1Q-2018 as amended by IEEE Std 802.1Qcp-2018). IEEE: New York, NY, USA, 2018; pp. 1–208. [CrossRef]
- IEEE Std 802.1 Qcp-2018; IEEE Standard for Local and Metropolitan Area Networks—Bridges and Bridged Networks—Amendment 30: Yang Data Model. (Amendment to IEEE Std 802.1Q-2018). IEEE: New York, NY, USA, 2018; pp. 1–93. [CrossRef]
- IEEE Std 802.1 AS-2020; IEEE Standard for Local and Metropolitan Area Networks—Timing and Synchronization for Time-Sensitive Applications. (Revision of IEEE Std 802.1AS-2011). IEEE: New York, NY, USA, 2020; pp. 1–421. [CrossRef]
- IEEE Std 802.1 Qcr-2020; IEEE Standard for Local and Metropolitan Area Networks—Bridges and Bridged Networks—Amendment 34: Asynchronous Traffic Shaping. (Amendment to IEEE Std 802.1Q-2018 as amended by IEEE Std 802.1Qcp-2018, IEEE Std 802.1Qcc-2018, IEEE Std 802.1Qcy-2019, and IEEE Std 802.1Qcx-2020). IEEE: New York, NY, USA, 2020; pp. 1–151. [CrossRef]
- IEEE Std 802.1 CS-2020; IEEE Standard for Local and Metropolitan Area Networks—Link-local Registration Protocol. IEEE: New York, NY, USA, 2021; pp. 1–151. [CrossRef]
- IEEE P802.1DG/D1.4; Draft Standard for Local and Metropolitan Area Networks—Time-Sensitive Networking Profile for Automotive In-Vehicle Ethernet Communications. IEEE: New York, NY, USA, 2021; pp. 1–137.
- Kern, A.; Zinner, H.; Streichert, T.; Nöbauer, J.; Teich, J. Accuracy of Ethernet AVB time synchronization under varying temperature conditions for automotive networks. In Proceedings of the 48th Design Automation Conference, San Diego, CA, USA, 5–10 June 2011; pp. 597–602. [Google Scholar]
- Lee, Y.S.; Kim, J.H.; Jeon, J.W. Flex Ray and Ethernet AVB synchronization for high QoS automotive gateway. IEEE Trans. Veh. Technol. 2016, 66, 5737–5751. [Google Scholar] [CrossRef]
- Gutiérrez, M.; Steiner, W.; Dobrin, R.; Punnekkat, S. Synchronization quality of IEEE 802.1 AS in large-scale industrial automation networks. In Proceedings of the 2017 IEEE Real-Time and Embedded Technology and Applications Symposium (RTAS), Pittsburgh, PA, USA, 18–21 April 2017; pp. 273–282. [Google Scholar]
- Pahlevan, M.; Balakrishna, B.; Obermaisser, R. Simulation framework for clock synchronization in time sensitive networking. In Proceedings of the 2019 IEEE 22nd International Symposium on Real-Time Distributed Computing (ISORC), Valencia, Spain, 7–9 May 2019; pp. 213–220. [Google Scholar]
- Lee, K.C.; Lee, S.; Lee, M.H. Worst case communication delay of real-time industrial switched Ethernet with multiple levels. IEEE Trans. Ind. Electron. 2006, 53, 1669–1676. [Google Scholar] [CrossRef]
- De Azua, J.A.R.; Boyer, M. Complete modelling of AVB in network calculus framework. In Proceedings of the 22nd International Conference on Real-Time Networks and Systems, Versailles, France, 8–10 October 2014; pp. 55–64. [Google Scholar]
- Queck, R. Analysis of Ethernet AVB for automotive networks using Network Calculus. In Proceedings of the 2012 IEEE International Conference on Vehicular Electronics and Safety (ICVES2012), Istanbul, Turkey, 24–27 July 2012; pp. 61–67. [Google Scholar]
- He, F.; Zhao, L.; Li, E. Impact analysis of flow shaping in Ethernet-AVB/TSN and AFDX from network calculus and simulation perspective. Sensors 2017, 17, 1181. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhao, L.; Pop, P.; Zheng, Z.; Li, Q. Timing analysis of AVB traffic in TSN networks using network calculus. In Proceedings of the 2018 IEEE Real-Time and Embedded Technology and Applications Symposium (RTAS), Porto, Portugal, 11–13 July 2018; pp. 25–36. [Google Scholar]
- Zhao, L.; Pop, P.; Craciunas, S.S. Worst-case latency analysis for IEEE 802.1 Qbv time sensitive networks using network calculus. IEEE Access 2018, 6, 41803–41815. [Google Scholar] [CrossRef]
- Zhao, L.; Pop, P.; Zheng, Z.; Daigmorte, H.; Boyer, M. Improving worst-case end-to-end delay analysis of multiple classes of AVB traffic in TSN networks using network calculus. Retrieved Dec. 2018, 10, 2020. [Google Scholar]
- Thangamuthu, S.; Concer, N.; Cuijpers, P.J.; Lukkien, J.J. Analysis of ethernet-switch traffic shapers for in-vehicle networking applications. In Proceedings of the 2015 Design, Automation & Test in Europe Conference & Exhibition (DATE), Grenoble, France, 9–13 March 2015; pp. 55–60. [Google Scholar]
- Leonardi, L.; Bello, L.L.; Patti, G. Performance assessment of the IEEE 802.1 Qch in an automotive scenario. In Proceedings of the 2020 AEIT International Conference of Electrical and Electronic Technologies for Automotive (AEIT AUTOMOTIVE), Turin, Italy, 18–20 November 2020; pp. 1–6. [Google Scholar]
- Lo Bello, L.; Patti, G.; Vasta, G. Assessments of Real-Time Communications over TSN Automotive Networks. Electronics 2021, 10, 556. [Google Scholar] [CrossRef]
- Lee, J.; Park, S. Time-sensitive network (TSN) experiment in sensor-based integrated environment for autonomous driving. Sensors 2019, 19, 1111. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ergenç, D.; Brülhart, C.; Neumann, J.; Krüger, L.; Fischer, M. On the security of IEEE 802.1 time-sensitive networking. In Proceedings of the 2021 IEEE International Conference on Communications Workshops (ICC Workshops), Seoul, Korea, 15 May 2021; pp. 1–6. [Google Scholar]
- Luo, F.; Wang, B.; Fang, Z.; Yang, Z.; Jiang, Y. Security Analysis of the TSN Backbone Architecture and Anomaly Detection System Design Based on IEEE 802.1 Qci. Secur. Commun. Netw. 2021, 2021, 6902138. [Google Scholar] [CrossRef]
- OMNeT++ Discrete Event Simulator. Available online: https://omnetpp.org/ (accessed on 20 April 2022).
- Opnet Network Simulator. Available online: https://opnetprojects.com/opnet-network-simulator/ (accessed on 20 April 2022).
- Falk, J.; Hellmanns, D.; Carabelli, B.; Nayak, N.; Dürr, F.; Kehrer, S.; Rothermel, K. NeSTiNg: Simulating IEEE time-sensitive networking (TSN) in OMNeT++. In Proceedings of the 2019 International Conference on Networked Systems (NetSys), München, Germany, 18–21 March 2019; pp. 1–8. [Google Scholar]
- Meyer, P.; Steinbach, T.; Korf, F.; Schmidt, T.C. Extending IEEE 802.1 AVB with time-triggered scheduling: A simulation study of the coexistence of synchronous and asynchronous traffic. In Proceedings of the 2013 IEEE Vehicular Networking Conference, Boston, MA, USA, 16–18 December 2013; pp. 47–54. [Google Scholar]
- Baniabdelghany, H.; Obermaisser, R. Extended synchronization protocol based on IEEE802. 1AS for improved precision in dynamic and asymmetric TSN hybrid networks. In Proceedings of the 2020 9th Mediterranean Conference on Embedded Computing (MECO), Budva, Montenegro, 7–10 June 2020; pp. 1–8. [Google Scholar]
- Pahlevan, M.; Schmeck, J.; Obermaisser, R. Evaluation of tsn dynamic configuration model for safety-critical applications. In Proceedings of the 2019 IEEE International Conference on Parallel & Distributed Processing with Applications, Big Data & Cloud Computing, Sustainable Computing & Communications, Social Computing & Networking (ISPA/BDCloud/SocialCom/SustainCom), Xiamen, China, 16–18 December 2019; pp. 566–571. [Google Scholar]
- CoRE4INET Framework. Available online: https://github.com/CoRE-RG/CoRE4INET (accessed on 20 April 2022).
- INET Framework. Available online: https://inet.omnetpp.org/ (accessed on 20 April 2022).
- Time-Triggered Ethernet. 2016. Available online: https://saemobilus.sae.org/content/as6802 (accessed on 20 April 2022).
- Heise, P.; Geyer, F.; Obermaisser, R. TSimNet: An industrial time sensitive networking simulation framework based on OMNeT++. In Proceedings of the 2016 8th IFIP International Conference on New Technologies, Mobility and Security (NTMS), Larnaca, Cyprus, 21–23 November 2016; pp. 1–5. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Standard | Name | Status | Application Field | |||
|---|---|---|---|---|---|---|
| AV 1 | AI 2 | IA 3 | MF 4 | |||
| IEEE 802.1Qav-2009 [9] | Forwarding and Queuing Enhancements for Time-Sensitive Streams | Published | √ | √ | √ | |
| IEEE 802.1Qca-2015 [10] | Path Control and Reservation | Published | √ | |||
| IEEE 802.1Qbv-2015 [11] | Enhancements for Scheduled Traffic | Published | √ | √ | ||
| IEEE 802.1Qbu-2016 [12] | Frame Preemption | Published | √ | √ | √ | √ |
| IEEE 802.1Qch-2017 [13] | Cyclic Queuing and Forwarding | Published | √ | √ | √ | |
| IEEE 802.1Qci-2017 [14] | Per-Stream Filtering and Policing | Published | √ | √ | √ | |
| IEEE 802.1CB-2017 [15] | Frame Replication and Elimination for Reliability | Published | √ | √ | √ | |
| IEEE 802.1Q-2018 [16] | Bridges and Bridged Networks | Published | √ | √ | √ | |
| IEEE 802.1CM-2018 [17] | Time-Sensitive Networking for Fronthaul | Published | √ | |||
| IEEE 802.1Qcc-2018 [18] | Stream Reservation Protocol (SRP) Enhancements and Performance Improvements | Published | √ | √ | ||
| IEEE 802.1Qcp-2018 [19] | YANG Data Model | Published | √ | √ | ||
| IEEE 802.1AS-2020 [20] | Timing and Synchronization for Time-Sensitive Applications | Published | √ | √ | √ | |
| IEEE 802.1Qcr-2020 [21] | Asynchronous Traffic Shaping | Published | √ | √ | ||
| IEEE 802.1CS-2020 [22] | Link-local Registration Protocol | Published | √ | √ | ||
| IEEE 802.1DG [23] | Time-Sensitive Networking Profile for Automotive In-Vehicle Ethernet Communications | Drafted | √ | |||
| TSN Features | OMNeT++ | OPNET | |||
|---|---|---|---|---|---|
| NeSTiNg [43] | CoRE4INET [44] | TSimNet | H. Baniabdelghany et al. [45] | M. Pahlevan et al. [46] | |
| Credit-based Shaper | √ | ||||
| Stream Reservation Protocol | √ | √ | |||
| Time-aware Shaper | √ | √ | √ | ||
| Frame Preemption | √ | √ | |||
| Per-Stream Filtering and Policing |  (Partial) (Partial) | √ | √ | ||
| Cyclic Queuing and Forwarding | |||||
| Asynchronous Traffic Shaping | |||||
| Frame Replication and Elimination for Reliability | √ | √ | |||
| Source Code Availability | Available | Available | Not Available | Not Available | Not Available |
| Characteristics | Description |
|---|---|
| Transmission Pattern | In-vehicle traffic can be sent according to events or cycles |
| Transmission Period | The transmission period represents the data transmission interval planned by the application layer |
| End-to-end Delay | Indicates the time taken by the traffic from the sender to the receiver, and the maximum end-to-end delay is the maximum value of all end-to-end delays of the traffic |
| Tolerance to Loss | Tolerance to loss indicates the application’s tolerance for continuous packet loss in the network transmission of the traffic |
| Criticality | The criticality is expressed as the degree of impact that may be caused by not guaranteeing the real-time performance of the traffic, which can be divided into three categories: high, medium, and low. |
| Traffic Class | PCP | Priority | Automotive Scenarios |
|---|---|---|---|
| TC8 | 7 | Highest | Safety-related control signals, such as engine signals, brake signals, turn signals, Advanced Driving Assistance System (ADAS) control signals, etc. |
| TC7 | 6 | Safety-related media signals, such as environmental perception sensor signals: millimeter-wave radar, lidar, ultrasonic radar, cameras, ADAS fusion data, real-time map download, positioning signals, etc. | |
| TC6 | 5 | Reserved | |
| TC5 | 4 | Network management signals, such as Precision Time Protocol (PTP) synchronization messages, network redundancy signals, network diagnostic signals, etc. | |
| TC4 | 3 | Vehicle to Everything (V2X) related events, warnings, alarm signals, dynamic network configuration signals, etc. | |
| TC3 | 2 | Non-safety-related control signals, such as lighting control, air conditioning control, door and window control, infotainment system control, etc., and vehicle status sensor signals: fuel battery consumption, water temperature, tire pressure signal, etc. | |
| TC2 | 1 | Non-safety-related media signals, such as audio and video signals of audio-visual entertainment systems, low-speed camera signals: reversing cameras, 360-degree surround-view cameras, head-up display signals (HUD), etc. | |
| TC1 | 0 | Lowest | Firmware Over the air technology (OTA) and software OTA, including offline map download, etc., cloud logging, uploading, diagnostic and configuration signals, and other Internet data access |
| Domain | Traffic type | Traffic Class | Zone | Transmission Path |
|---|---|---|---|---|
| ADAS | Safety-related media signals | 6 | Front left | Lidar/camera -> Zonal Controller1 -> Central Controller1 -> Remote Controller1 |
| Front right | Radar/camera -> Zonal Controller2 -> Central Controller2 * -> Central Controller1 -> Remote Controller1 | |||
| Rear | Radar/camera -> Zonal Controller3 -> Central Controller3 * -> Central Controller1 -> Remote Controller1 | |||
| Chassis | Safety-related control signals: brake signals | 7 | Front left | Central Controller1 -> Zonal Controller1 -> Brake Motor1 |
| Front right | Central Controller1 * -> Central Controller2 -> Zonal Controller2 -> Brake Motor2 | |||
| Rear | Central Controller1 * -> Central Controller3 -> Zonal Controller3 -> Brake Motor3 | |||
| Infotainment | video | 1 | Front right | Video->Zonal Controller2 -> Central Controller2 -> Central Controller3 -> Remote Controller3 |
| 3D stereo surround music | 1 | Front left | Remote Controller3 -> Central Controller3 -> Central Controller1 -> Zonal Controller1 -> Audio1 | |
| Front right | Remote Controller3 -> Central Controller3 -> Central Controller2 -> Zonal Controller2 -> Audio2 | |||
| Rear | Remote Controller3->Central Controller3->Zonal Controller3->Audio3 | |||
| Body | Non-safety-related control signals: door and window signals | 2 | Front left | Central Controller2 -> Central Controller1 -> Zonal Controller1 -> Window1 |
| Front right | Central Controller2 -> Zonal Controller2 -> Window2 | |||
| Rear | Central Controller2 -> Central Controller3 -> Zonal Controller3 -> Window3 |
| Traffic Type | Source | Destination | Priority | VLANID | Size (Bytes) | Start Time | Transmission Interval (μs) | Redundancy | Bandwidth (Mbps) |
|---|---|---|---|---|---|---|---|---|---|
| Lidar | Lidar | VCC1 | 6 | 1 | 1500 | 0 µs | 100 | No | 121.8 |
| Camera | Camera1 | VCC1 | 6 | 2 | 490 | 15 µs | 100 | No | 41 |
| Millimeter-wave radar | Radar1 | VCC1 | 6 | 6 | 42 | 20 µs | 1000 | Yes | 0.5 |
| Camera | Camera2 | VCC1 | 6 | 7 | 490 | 22 µs | 100 | Yes | 41 |
| Millimeter-wave radar | Radar2 | VCC1 | 6 | 12 | 42 | 25 µs | 1000 | Yes | 0.5 |
| Camera | Camera3 | VCC1 | 6 | 13 | 490 | 27 µs | 100 | Yes | 41 |
| Camera | Camera4 | VCC1 | 6 | 14 | 490 | 31 µs | 100 | Yes | 41 |
| Brake | VCC1 | Brake_Act1 | 7 | 3 | 42 | 0 µs | 100 | No | 5.1 |
| Brake | VCC1 | Brake_Act2 | 7 | 8 | 42 | 2 µs | 100 | Yes | 5.1 |
| Brake | VCC1 | Brake_Act3 | 7 | 15 | 42 | 4 µs | 100 | Yes | 5.1 |
| Audio | VCC3 | Audio1 | 4 | 4 | 234 | 0 µs | 100–200 | No | 10.2 |
| Audio | VCC3 | Audio2 | 4 | 9 | 234 | 5 µs | 100–200 | No | 10.2 |
| Audio | VCC3 | Audio3 | 4 | 16 | 234 | 10 µs | 100–200 | No | 10.2 |
| Video | Video | VCC3 | 4 | 10 | 1500 | 0 µs | 100–200 | No | 60.9 |
| Window | VCC2 | Win_Act1 | 3 | 5 | 42 | 50 µs | 100–200 | No | 2.6–5.1 |
| Window | VCC2 | Win_Act2 | 3 | 11 | 42 | 55 µs | 100–200 | No | 2.6–5.1 |
| Window | VCC2 | Win_Act3 | 3 | 17 | 42 | 60 µs | 100–200 | No | 2.6–5.1 |
| Traffic | Priority | Mean 1 (μs) | Min 1 (μs) | Max 1 (μs) | Jitter 1 (μs) | Max 2 (μs) | Jitter 2 (μs) | Max 3 (μs) | Jitter 3 (μs) | Differ 4 (μs) |
|---|---|---|---|---|---|---|---|---|---|---|
| Audio1 | 4 | 16.78 | 16.75 | 18.62 | 1.87 | 84.93 | 68.18 | 86.01 | 69.26 | 67.39 |
| Audio2 | 4 | 16.95 | 16.75 | 21.33 | 4.58 | 85.86 | 69.11 | 85.86 | 69.11 | 64.53 |
| Audio3 | 4 | 11.92 | 11.89 | 13.96 | 2.07 | 79.87 | 67.99 | 79.87 | 67.99 | 65.91 |
| Brake_Act1 | 7 | 7.30 | 7.28 | 9.45 | 2.17 | 7.28 | 0.00 | 7.28 | 0.00 | −2.17 |
| Brake_Act2 | 7 | 10.62 | 10.60 | 12.78 | 2.17 | 10.60 | 0.00 | 10.60 | 0.00 | −2.18 |
| Brake_Act3 | 7 | 14.37 | 13.93 | 26.25 | 12.32 | 13.93 | 0.00 | 10.60 | 0.00 | −15.65 |
| Lidar | 6 | 59.19 | 57.26 | 61.49 | 4.23 | 59.95 | 0.67 | 59.28 | 0.00 | −2.21 |
| Camera1 | 6 | 48.60 | 46.52 | 50.77 | 4.26 | 49.20 | 0.67 | 48.53 | 0.00 | −2.24 |
| Radar1 | 6 | 11.03 | 10.60 | 22.93 | 12.32 | 10.60 | 0.00 | 10.60 | 0.00 | −12.33 |
| Camera2 | 6 | 26.31 | 24.94 | 43.77 | 18.83 | 24.94 | 0.00 | 24.94 | 0.00 | −18.83 |
| Radar2 | 6 | 22.12 | 17.26 | 22.69 | 5.43 | 22.61 | 0.00 | 13.93 | 0.00 | −8.76 |
| Camera3 | 6 | 41.05 | 40.79 | 43.03 | 2.24 | 41.46 | 0.67 | 40.79 | 0.00 | −2.24 |
| Camera4 | 6 | 41.31 | 41.04 | 43.28 | 2.24 | 41.72 | 0.67 | 41.04 | 0.00 | −2.24 |
| Video | 4 | 57.36 | 57.26 | 61.47 | 4.21 | 125.34 | 68.08 | 125.34 | 68.08 | 63.87 |
| Win_Act1 | 3 | 10.97 | 10.60 | 16.23 | 5.62 | 82.35 | 71.74 | 83.37 | 72.76 | 67.14 |
| Win_Act2 | 3 | 7.31 | 7.28 | 9.39 | 2.12 | 76.15 | 68.87 | 76.15 | 68.87 | 66.76 |
| Win_Act3 | 3 | 11.24 | 10.60 | 23.56 | 12.96 | 89.12 | 78.52 | 89.12 | 78.52 | 65.56 |
| Traffic Class | Priority | Periodicity | Transmission Period | End-to-End Delay | Tolerance to Loss | Criticality |
|---|---|---|---|---|---|---|
| TC8 | Highest | Periodic/Sporadic | ≤20 ms | ≤100 μs/5 hops | No | High |
| TC7 | Periodic | ≤10 ms | ≤100 μs/5 hops | No | High | |
| TC6 | reserved | / | / | / | / | / |
| TC5 | Periodic | 50 ms–1 s | / | Yes | High | |
| TC4 | Sporadic | / | ≤10 ms | Yes | Medium | |
| TC3 | Periodic/Sporadic | ≤200 ms | ≤50 ms | Yes | Medium | |
| TC2 | Periodic | Depends on sensors | ≤300 ms | Yes | Medium | |
| TC1 | Lowest | Sporadic | / | / | Yes | Low |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Luo, F.; Wang, B.; Yang, Z.; Zhang, P.; Ma, Y.; Fang, Z.; Wu, M.; Sun, Z. Design Methodology of Automotive Time-Sensitive Network System Based on OMNeT++ Simulation System. Sensors 2022, 22, 4580. https://doi.org/10.3390/s22124580
Luo F, Wang B, Yang Z, Zhang P, Ma Y, Fang Z, Wu M, Sun Z. Design Methodology of Automotive Time-Sensitive Network System Based on OMNeT++ Simulation System. Sensors. 2022; 22(12):4580. https://doi.org/10.3390/s22124580
Chicago/Turabian StyleLuo, Feng, Bowen Wang, Zhenyu Yang, Ping Zhang, Yifei Ma, Zihao Fang, Mingzhi Wu, and Zhipeng Sun. 2022. "Design Methodology of Automotive Time-Sensitive Network System Based on OMNeT++ Simulation System" Sensors 22, no. 12: 4580. https://doi.org/10.3390/s22124580