
Visual-SLAM Classical Framework and Key Techniques: A Review


 ,
, 
Abstract
:1. Introduction
2. The Development of V-SLAM
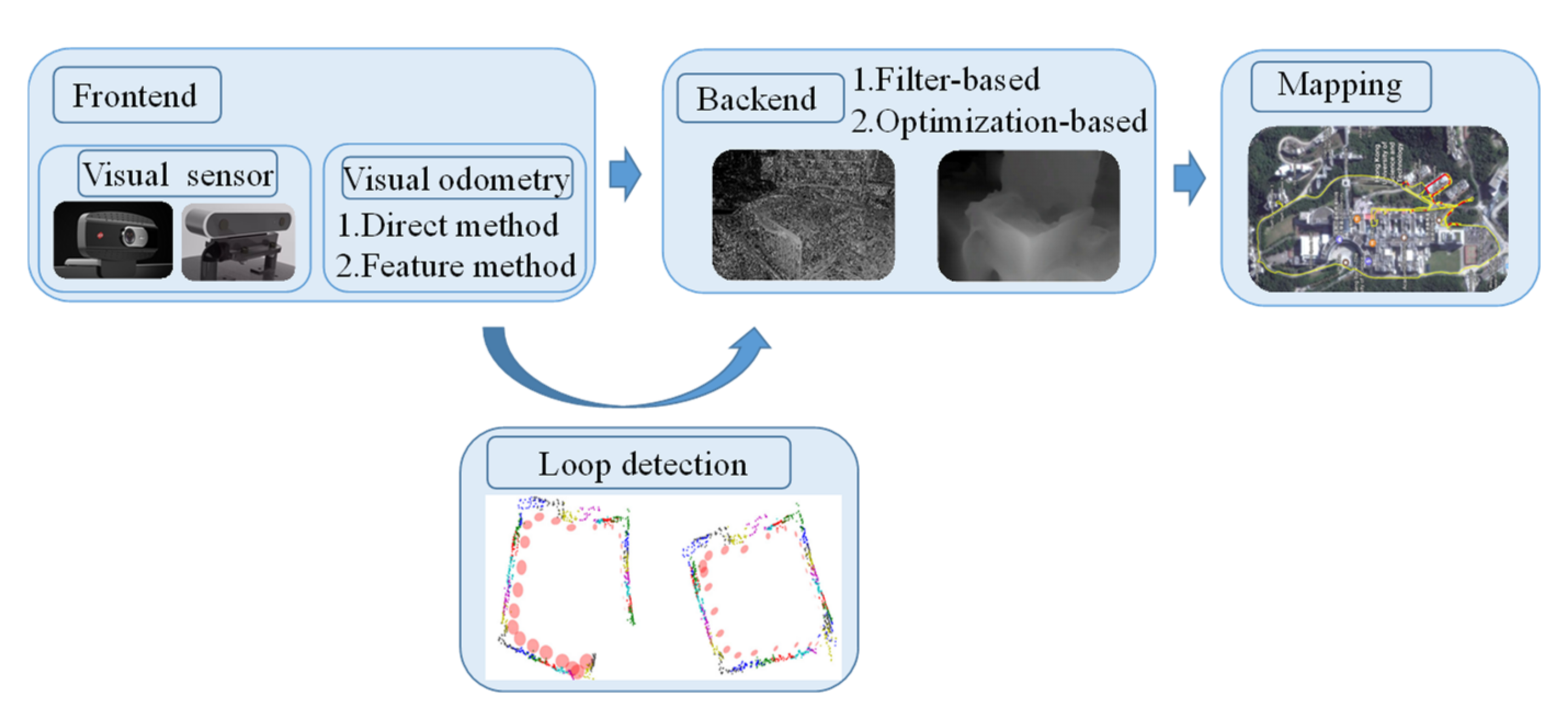
3. V-SLAM Classical Framework
3.1. Frontend
3.1.1. Visual Sensor
3.1.2. Visual Odometry
3.2. Backend Optimization
3.3. Loop Detection
3.4. Mapping
4. V-SLAM Key Techniques
4.1. Feature Detection and Matching
4.1.1. SIFT
4.1.2. SURF
4.1.3. ORB Feature
4.2. Selection of Keyframes
4.3. Uncertainty Technology
4.4. Expression of Maps
5. Developmental Needs for V-SLAM
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Leonard, J.J.; Durrant-Whyte, H.F. Simultaneous Map Building, and Localization for an Autonomous Mobile Robot. In Proceedings of the IROS ‘91:IEEE/RSJ International Workshop on Intelligent Robots and Systems ‘91, Osaka, Japan, 3–5 November 1991. [Google Scholar]
- Wang, H.; Huang, S.; Khosoussi, K.; Frese, U.; Dissanayake, G.; Liu, B. Dimensionality Reduction for Point Feature SLAM Problems with Spherical Covariance Matrices. Automatica 2015, 51, 149–157. [Google Scholar] [CrossRef] [Green Version]
- Szendy, B.; Balázs, E.; Szabó-Resch, M.Z.; Vamossy, Z. Simultaneous Localization and Mapping with TurtleBotII. In Proceedings of the CINTI, the 16th IEEE International Symposium on IEEE, Budapest, Hungary, 19–21 November 2015. [Google Scholar]
- Lategahn, H.; Geiger, A.; Kitt, B. Visual SLAM for autonomous ground vehicles. In Proceedings of the IEEE International Conference on Robotics & Automation, Shanghai, China, 9–13 May 2011. [Google Scholar]
- Beall, C.; Lawrence, B.J.; Ila, V.; Dellaert, F. 3D Reconstruction of Underwater Structures. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots & Systems, Taipei, Taiwan, 18–22 October 2010. [Google Scholar]
- Kim, A.; Eustice, R.M. Real-Time Visual SLAM for Autonomous Underwater Hull Inspection Using Visual Saliency. IEEE Trans. Robot. 2013, 29, 719–733. [Google Scholar] [CrossRef] [Green Version]
- Li, R.; Liu, J.; Zhang, L.; Hang, Y. LIDAR/MEMS IMU Integrated Navigation (SLAM) Method for a Small UAV in Indoor Environments. In Proceedings of the 2014 DGON Inertial Sensors and Systems (ISS), Karlsruhe, Germany, 16–17 September 2014. [Google Scholar]
- Marzat, J.; Bertrand, S.; Eudes, A.; Sanfourche, M.; Moras, J. Reactive MPC for Autonomous MAV Navigation in Indoor Cluttered Environments: Flight Experiments. IFAC-PapersOnLine 2017, 50, 15996–16002. [Google Scholar] [CrossRef]
- Smith, R.; Cheeseman, P. On the Representation of Spatial Uncertainty. Int. J. Robot Res. 1986, 5, 56–68. [Google Scholar] [CrossRef]
- Smith, R.; Self, M.; Cheeseman, P. Estimating Uncertain Spatial Relationships in Robotics. Mach. Intell. Pattern Recognit. 1988, 5, 435–461. [Google Scholar]
- Durrant-Whyte, H.; Bailey, T. Simultaneous localization and mapping: Part, I. IEEE Robot. Autom. Mag. 2006, 13, 99–110. [Google Scholar] [CrossRef] [Green Version]
- Durrant-Whyte, H.; Bailey, T. Simultaneous localization and mapping (SLAM): Part II. IEEE Robot. Autom. Mag. 2006, 13, 108–117. [Google Scholar] [CrossRef] [Green Version]
- Csorba, M. Simultaneous Localisation and Map Building; University of Oxford: Oxford, UK, 1997. [Google Scholar]
- Kootstra, G. Guest Editorial: Special Issue on Visual SLAM. IEEE Trans. Robot. 2008, 24, 929–931. [Google Scholar]
- Davison, A.J.; Reid, I.D.; Molton, N.D.; Stasse, O. MonoSLAM: Real-Time Single Camera SLAM. IEEE Trans. Pattern Anal. Mach. Intell. 2007, 29, 1052–1067. [Google Scholar] [CrossRef] [Green Version]
- Klein, G.; Murray, D. Parallel Tracking and Mapping for Small AR Workspaces. In Proceedings of the 2007 6th IEEE and ACM International Symposium on Mixed and Augmented Reality, Nara, Japan, 13–16 November 2007; pp. 225–234. [Google Scholar]
- Triggs, B.; McLauchlan, P.F.; Hartley, R.I.; Fitzgibbon, A.W. Bundle Adjustment-A Modern Synthesis. In Vision Algorithms: Theory and Practice. IWVA 1999. Lecture Notes in Computer Science; Triggs, B., Zisserman, A., Szeliski, R., Eds.; Springer: Berlin/Heidelberg, Germany, 1999. [Google Scholar]
- Mur-Artal, R.; Montiel, J.M.M.; Tardos, J.D. ORB-SLAM: A Versatile and Accurate Monocular SLAM System. IEEE Trans. Robot. 2015, 31, 1147–1163. [Google Scholar] [CrossRef] [Green Version]
- Engel, J.; Schps, T.; Cremers, D. LSD-SLAM: Large-Scale Direct Monocular SLAM; Springer: Cham, Switzerland, 2014; pp. 834–849. [Google Scholar]
- Engel, J.; Koltun, V.; Cremers, D. Direct Sparse Odometry. IEEE Trans. Pattern Anal. Mach. Intell. 2018, 40, 611–625. [Google Scholar] [CrossRef] [PubMed]
- Tong, Q.; Li, P.; Shen, S. VINS-Mono: A Robust and Versatile Monocular Visual-Inertial State Estimator. IEEE Trans. Robot. 2017, 34, 1004–1020. [Google Scholar]
- Lynen, S.; Sattler, T.; Bosse, M.; Hesch, J.; Pollefeys, M.; Siegwart, R. Get Out of My Lab: Large-scale, Real-Time Visual-Inertial Localization. Robotics: Science & Systems; MIT Press: Rome, Italy, 2015. [Google Scholar]
- Rosinol, A.; Abate, M.; Chang, Y.; Carlone, L. Kimera: An Open-Source Library for Real-Time Metric-Semantic Localization and Mapping. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 1689–1696. [Google Scholar]
- Rosinol, A.; Violette, A.; Abate, M.; Hughes, N.; Chang, Y.; Shi, J. Kimera: From SLAM to Spatial Perception with 3D Dynamic Scene Graphs. Ind. Robot 2021, 40, 1510–1546. [Google Scholar] [CrossRef]
- Nister, D.; Naroditsky, O.; Bergen, J.R. Visual odometry. In Proceedings of the IEEE Computer Society Conference on Computer Vision & Pattern Recognition, Washington, DC, USA, 27 June–2 July 2004. [Google Scholar]
- Huang, B.; Zhao, J.; Liu, J. A Survey of Simultaneous Localization and Mapping with an Envision in 6G Wireless Networks. arXiv 2019, arXiv:1909.05214. [Google Scholar]
- Liu, H.; Zhang, G.; Bao, H. A Survey of Monocular Simultaneous Localization and Mapping. J. Comput. Aided Des. Comput. Graph. 2016, 28, 855–868. [Google Scholar]
- Khoshelham, K.; Elberink, S.O. Accuracy and Resolution of Kinect Depth Data for Indoor Mapping Applications. Sensors 2012, 12, 1437. [Google Scholar] [CrossRef] [Green Version]
- Henry, P.; Krainin, M.; Herbst, E.; Ren, X.; Fox, D. RGB-D Mapping: Using Depth Cameras for Dense 3D Modeling of Indoor Environments. Exp. Robot. 2014, 79, 477–491. [Google Scholar]
- Grisetti, G.; Kümmerle, R.; Strasdat, H.; Konolige, K. G2o: A general Framework for (Hyper) Graph Optimization. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 3607–3613. [Google Scholar]
- Endres, F.; Hess, J.; Sturm, J.; Cremers, D.; Burgard, W. 3-D Mapping with an RGB-D Camera. IEEE Trans. Robot. 2014, 30, 177–187. [Google Scholar] [CrossRef]
- Xin, J.; Gou, J.; Ma, X.; Huang, K.; Zhang, Y. A Large Viewing Angle 3-Dimensional V-Slam Algorithm with a Kinect-Based Mobile Robot System. Jiqiren/Robot 2014, 36, 560–568. [Google Scholar]
- Dryanovski, I.; Valenti, R.G.; Xiao, J. Fast Visual Odometry and Mapping from RGB-D Data. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 2305–2310. [Google Scholar]
- Stowers, J.; Hayes, M.; Bainbridge-Smith, A. Altitude Control of a Quadrotor Helicopter Using Depth Map from Microsoft Kinect sensor. In Proceedings of the 2011 IEEE International Conference on Mechatronics, Istanbul, Turkey, 13–15 April 2011; pp. 358–362. [Google Scholar]
- Forster, C.; Pizzoli, M.; Scaramuzza, D. SVO: Fast Semi-Direct Monocular Visual Odometry. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 15–22. [Google Scholar]
- Myriam, S.; Valérie, R.; Alexis, D.; Nicolas, A. Visual and Visual-Inertial SLAM: State of the Art, Classification, and Experimental Benchmarking. J. Sens. 2021, 2021, 2054828. [Google Scholar]
- Debeunne, C.; Vivet, D. A Review of Visual-LiDAR Fusion Based Simultaneous Localization and Mapping. Sensors 2020, 20, 2068. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Jung, J.H.; Cha, J.; Chung, J.Y. Monocular Visual-Inertial-Wheel Odometry Using Low-Grade IMU in Urban Areas. IEEE Trans. Intell. Transp. Syst. 2020, 23, 925–938. [Google Scholar] [CrossRef]
- Fu, D.; Xia, H.; Qiao, Y. Monocular Visual-Inertial Navigation for Dynamic Environment. Remote Sens. 2021, 13, 1610. [Google Scholar] [CrossRef]
- Cheng, J.; Zhang, L.; Chen, Q. An Improved Initialization Method for Monocular Visual-Inertial SLAM. Electronics 2021, 10, 3063. [Google Scholar] [CrossRef]
- Chai, W.; Li, C.; Zhang, M. An Enhanced Pedestrian Visual-Inertial SLAM System Aided with Vanishing Point in Indoor Environments. Sensors 2021, 21, 7428. [Google Scholar] [CrossRef]
- Xu, C.; Liu, Z.; Li, Z. Robust Visual-Inertial Navigation System for Low Precision Sensors Under Indoor and Outdoor Environments. Remote Sens. 2021, 13, 772. [Google Scholar] [CrossRef]
- Eckenhoff, K.; Geneva, P.; Bloecker, J. Multi-Camera Visual-Inertial Navigation with Online Intrinsic and Extrinsic Calibration. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, Canada, 20–24 May 2019; pp. 3158–3164. [Google Scholar]
- Chen, C.; Wang, L.; Zhu, H. Keyframe-Based Stereo Visual-Inertial SLAM using Nonlinear Optimization. In Proceedings of the Global Intelligence Industry Conference (GIIC 2018), Beijing, China, 21–23 May 2018; Volume 10835, pp. 171–179. [Google Scholar]
- Shan, T.; Englot, B.; Ratti, C. Lvi-Sam: Tightly-Coupled Lidar-Visual-Inertial Odometry Via Smoothing and Mapping. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2021; pp. 5692–5698. [Google Scholar]
- Zhang, Z.; Zhao, R.; Liu, E. Scale Estimation and Correction of the Monocular Simultaneous Localization and Mapping (slam) Based on Fusion of 1d Laser Range Finder and Vision Data. Sensors 2018, 18, 1948. [Google Scholar] [CrossRef] [Green Version]
- Yang, B.; Li, J.; Zhang, H. Resilient Indoor Localization System Based on UWB and Visual–Inertial Sensors for Complex Environments. IEEE Trans. Instrum. Meas. 2021, 70, 1–14. [Google Scholar] [CrossRef]
- Cox, I.J.; Wilfong, G.T. Autonomous Robot Vehicles; Springer: New York, NY, USA, 1990. [Google Scholar]
- Moutarlier, P.; Chatila, R. An Experimental System for Incremental Environment Modelling by an Autonomous Mobile Robot. Lect. Notes Control. Inf. Sci. 1990, 139, 327–346. [Google Scholar]
- Julier, S.J.; Uhlmann, J.K. A Counter Example to the Theory of Simultaneous Localization and Map Building. In Proceedings of the 2001 ICRA. IEEE International Conference on Robotics and Automation, Seoul, Korea, 21–26 May 2001; Volume 4, pp. 4238–4243. [Google Scholar]
- Gordon, N.J.; Salmond, D.J.; Smith, A. Novel approach to nonlinear/non-Gaussian Bayesian state estimation. IEEE Proc. Part F Radar Signal Process. 1993, 140, 107–113. [Google Scholar] [CrossRef] [Green Version]
- Montemarlo, M.; Thrun, S.; Koller, D.; Wegbreit, B. Fast SLAM: A Factored Solution to the Simultaneous Localization and Mapping Problem. In Proceedings of the Eighteenth National Conference on Artificial Intelligence (AAAI-02), Edmonton, AB, Canada, 28 July–1 August 2002; pp. 593–598. [Google Scholar]
- Montemerlo, M.; Thrun, S.; Koller, D.; Wegbreit, B. Fast SLAM 2.0: An improved particle filtering algorithm for simultaneous localization and mapping that provably converges. In Proceedings of the 18th International Joint Conference on Artificial Intelligence, San Francisco, CA, USA, 9–15 August 2003; pp. 1151–1156. [Google Scholar]
- Murphy, K.; Russell, S. Rao-Blackwellised Particle Filtering for Dynamic Bayesian Networks. In Statistics for Engineering and Information Science; Springer: New York, NY, USA, 2001; pp. 499–515. [Google Scholar]
- Thrun, S.B.; Montemerlo, M.S. The Graph SLAM Algorithm with Applications to Large-Scale Mapping of Urban Structures. Int. J. Robot. Res. 2006, 25, 403–429. [Google Scholar] [CrossRef]
- Golfarelli, M.; Maio, D.; Rizzi, S. Elastic Correction of Dead-Reckoning Errors in Map Building. In Proceedings of the 1998 IEEE/RSJ International Conference on Intelligent Robots and Systems. Innovations in Theory, Practice and Applications, Victoria, BC, Canada, 17 October 1998; Volume 2, pp. 905–911. [Google Scholar]
- Williams, B.; Cummins, M.; Neira, J.; Newman, P.; Reida, I.; Tardósb, J. A comparison of loop closing techniques in monocular SLAM. Robot Auton. Syst. 2009, 57, 1188–1197. [Google Scholar] [CrossRef] [Green Version]
- Mur-Artal, R.; Tardós, J.D. ORB-SLAM: Tracking and Mapping Recognizable. In Proceedings of the Workshop on Multi View Geometry in Robotics (MVIGRO)-RSS 2014, Berkeley, CA, USA, 13 July 2014. [Google Scholar]
- Cummins, M.; Newman, P. Accelerated Appearance-Only SLAM. In Proceedings of the IEEE International Conference on Robotics and Automation, Pasadena, CA, USA, 19–23 May 2008; pp. 1828–1833. [Google Scholar]
- Clemente, L.A.; Davison, A.J.; Reid, I.D. Mapping Large Loops with a Single Hand-Held Camera. In Robotics: Science and Systems III; MIT Press: Cambridge, MA, USA, 2008; pp. 297–304. [Google Scholar]
- Williams, B.P.; Cummins, M.; Neira, J.; Newman, P.M.; Tardós, J.D. An Image-to-Map Loop Closing Method for Monocular SLAM. In Proceedings of the 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems, Nice, France, 22–26 September 2008; pp. 2053–2059. [Google Scholar]
- Cummins, M.; Newman, P. FAB-MAP: Probabilistic Localization and Mapping in the Space of Appearance. Int. J. Robot Res. 2008, 27, 647–665. [Google Scholar] [CrossRef]
- Mur-Artal, R.; Tardós, J.D. Fast relocalisation and loop closing in keyframe-based SLAM. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 846–853. [Google Scholar]
- Angeli, A.; Filliat, D.; Doncieux, S. Fast and Incremental Method for Loop-Closure Detection Using Bags of Visual Words. IEEE Trans. Robot. 2008, 24, 1027–1037. [Google Scholar] [CrossRef] [Green Version]
- Cummins, M.; Newman, P. Highly Scalable Appearance-Only SLAM –FAB-MAP 2.0. Proc. Robot. Sci. Syst. 2009, 5, 1–8. [Google Scholar]
- Galvez-Lpez, D.; Tardos, J.D. Bags of Binary Words for Fast Place Recognition in Image Sequences. IEEE Trans. Robot. 2012, 28, 1188–1197. [Google Scholar] [CrossRef]
- Gálvez-López, D.; Tardós, J.D. Real-Time Loop Detection with Bags of Binary Words. In Proceedings of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011; pp. 51–58. [Google Scholar]
- Nistér, D.; Stewénius, H. Scalable Recognition with a Vocabulary Tree. In Proceedings of the 2006 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’06), New York, NY, USA, 17–22 June 2006; pp. 2161–2168. [Google Scholar]
- Smith, M.; Baldwin, I.; Churchill, W.; Paul, R.; Newman, P. The New College Vision and Laser Data Set. Int. J. Robot. Res. 2009, 28, 595–599. [Google Scholar] [CrossRef] [Green Version]
- Bonarini, A.; Burgard, W.; Fontana, G.; Matteucci, M.; Sorrenti, D.G.; Tardos, J.D. RAWSEEDS: Robotics Advancement through Web-publishing of Sensorial and Elaborated Extensive Data Sets. In Proceedings of the IROS’06 Workshop on Benchmarks in Robotics Research, Beijing, China, 9–15 October 2006; pp. 1–5. [Google Scholar]
- Pandey, G.; Mcbride, J.R.; Eustice, R.M. Ford Campus Vision and Lidar Data Set. Int. J. Robot. Res. 2011, 30, 1543–1552. [Google Scholar] [CrossRef]
- Blanco, J.L.; Moreno, F.A.; Gonzalez, J. A Collection of Outdoor Robotic Datasets with Centimeter-Accuracy Ground Truth. Kluwer Acad. Publ. 2009, 27, 327–351. [Google Scholar] [CrossRef]
- Cummins, M.; Newman, P. Appearance-Only SLAM at Large Scale with FAB-MAP 2.0. Int. Robot. Res. 2011, 30, 1100–1123. [Google Scholar] [CrossRef]
- Klein, G.; Murray, D. Parallel Tracking and Mapping on a Camera Phone. In Proceedings of the 2009 8th IEEE International Symposium on Mixed and Augmented Reality, Orlando, FL, USA, 19–22 October 2009; pp. 83–86. [Google Scholar]
- Mur-Artal, R.; Tardos, J.D. ORB-SLAM2: An Open-Source SLAM System for Monocular, Stereo and RGB-D Cameras. IEEE Trans. Robot. 2017, 33, 1255–1262. [Google Scholar] [CrossRef] [Green Version]
- Bescos, B.; Fácil, J.M.; Civera, J. DynaSLAM: Tracking, Mapping, and Inpainting in Dynamic Scenes. IEEE Robot. Autom. Let. 2018, 3, 4076–4083. [Google Scholar] [CrossRef] [Green Version]
- Nguyen, D.D.; Elouardi, A.; Florez, S.A.R. HOOFR SLAM System: An Embedded Vision SLAM Algorithm and its Hard-ware-Software Mapping-Based Intelligent Vehicles Applications. IEEE Trans. Intell. Transp. 2018, 20, 4103–4118. [Google Scholar] [CrossRef]
- Gomez-Ojeda, R.; Moreno, F.A.; Zuniga-Noël, D. PL-SLAM: A Stereo SLAM System Through the Combination of Points and Line Segments. IEEE Trans. Robot. 2019, 35, 734–746. [Google Scholar] [CrossRef] [Green Version]
- Yang, S.; Scherer, S. Cubeslam: Monocular 3-d Object Slam. IEEE Trans. Robot. 2019, 35, 925–938. [Google Scholar] [CrossRef] [Green Version]
- Lajoie, P.Y.; Ramtoula, B.; Chang, Y. DOOR-SLAM: Distributed, Online, and Outlier Resilient SLAM for Robotic Teams. IEEE Robot. Autom. Let. 2020, 5, 1656–1663. [Google Scholar] [CrossRef] [Green Version]
- Wang, C.; Luo, B.; Zhang, Y. DymSLAM: 4D Dynamic Scene Reconstruction Based on Geometrical Motion Segmentation. IEEE Robot. Autom. Let. 2020, 6, 550–557. [Google Scholar] [CrossRef]
- Ince, O.F.; Kim, J.S. Tima slam: Tracking Independently and Mapping Altogether for an Uncalibrated Multi-Camera System. Sensors 2021, 21, 409. [Google Scholar] [CrossRef]
- Dong, X.; Cheng, L.; Peng, H. FSD-SLAM: A Fast Semi-Direct SLAM Algorithm. Complex Intell. Syst. 2022, 8, 1823–1834. [Google Scholar] [CrossRef]
- Wang, J.; Rünz, M.; Agapito, L. DSP-SLAM: Object Oriented SLAM with Deep Shape Priors. In Proceedings of the 2021 International Conference on 3D Vision (3DV), London, UK, 1–3 December 2021; pp. 1362–1371. [Google Scholar]
- Ali, A.M.; Nordin, M.J. SIFT Based Monocular SLAM with Multi-Clouds Features for Indoor Navigation. In Proceedings of the TENCON 2010—2010 IEEE Region 10 Conference, Fukuoka, Japan, 21–24 November 2010; pp. 2326–2331. [Google Scholar]
- Zhang, Z.; Huang, Y.; Li, C.; Kang, Y. Monocular Vision Simultaneous Localization and Mapping Using SURF. In Proceedings of the 2008 7th World Congress on Intelligent Control and Automation, Chongqing, China, 25–27 June 2008; pp. 1651–1656. [Google Scholar]
- Lowe, D.G. Distinctive Image Features from Scale-Invariant Keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Bay, H.; Ess, A.; Tuytelaars, T.; Gool, L. Speeded-Up Robust Features (SURF). Comput. Vis. Image Underst. 2008, 110, 346–359. [Google Scholar] [CrossRef]
- Rublee, E.; Rabaud, V.; Konolige, K.; Bradski, G. ORB: An Efficient Alternative to SIFT or SURF. In Proceedings of the 2011 International Conference on Computer Vision, Barcelona, Spain, 6–13 November 2011; pp. 2564–2571. [Google Scholar]
- Wu, E.; Zhao, L.; Guo, Y.; Zhou, W.; Wang, Q. Monocular Vision SLAM based on Key Feature Points Selection. In Proceedings of the 2010 IEEE International Conference on Information and Automation, Harbin, China, 20–23 June 2010; pp. 1741–1745. [Google Scholar]
- Chen, C.; Chan, Y. SIFT-based Monocluar SLAM with Inverse Depth Parameterization for Robot Localization. In Proceedings of the 2007 IEEE Workshop on Advanced Robotics and Its Social Impacts, Hsinchu, Taiwan, 9–11 December 2007; pp. 1–6. [Google Scholar]
- Zhu, D. Binocular Vision-SLAM Using Improved SIFT Algorithm. In Proceedings of the 2010 2nd International Workshop on Intelligent Systems and Applications, Wuhan, China, 22–23 May 2010; pp. 1–4. [Google Scholar]
- You, Y. The Research of SLAM Monocular Vision Based on The Improved SURF Feather. In Proceedings of the 2014 International Conference on Computational Intelligence and Communication Networks, Bhopal, India, 14–16 November 2014; pp. 344–348. [Google Scholar]
- Wang, Y.; Feng, Y. Data Association and Map Management for Robot SLAM Using Local Invariant Features. In Proceedings of the 2013 IEEE International Conference on Mechatronics and Automation, Takamatsu, Japan, 4–7 August 2013; pp. 1102–1107. [Google Scholar]
- Rosten, E.; Drummond, T. Machine learning for very high-speed corner detection. In Proceedings of the ECCV 2006: Computer Vision—ECCV 2006, Graz, Austria, 7–13 May 2006; pp. 430–443. [Google Scholar]
- Calonder, M.; Lepetit, V.; Fua, P. BRIEF: Binary Robust Independent Elementary Features. Lect. Notes Comput. Sci. 2010, 63147, 778–792. [Google Scholar]
- Xin, G.; Zhang, X.; Xi, W.; Song, J. A RGBD SLAM Algorithm Combining ORB with PROSAC for Indoor Mobile Robot. In Proceedings of the 2015 4th International Conference on Computer Science and Network Technology (ICCSNT), Harbin, China, 19–20 December 2015; pp. 71–74. [Google Scholar]
- Jun, L.; Pan, T.; Tseng, K.; Pan, J. Design of a Monocular Simultaneous Localisation and Mapping System with ORB Feature. In Proceedings of the 2013 IEEE International Conference on Multimedia and Expo (ICME), San Jose, CA, USA, 15–19 July 2013; pp. 1–4. [Google Scholar]
- Kerl, C.; Sturm, J.; Cremers, D. Dense Visual SLAM for RGB-D Cameras. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 2100–2106. [Google Scholar]
- Thrun, S. Learning metric-topological maps for indoor mobile robot navigation. Artif. Intell. 1998, 99, 21–71. [Google Scholar] [CrossRef] [Green Version]
- Choset, H.; Nagatani, K. Topological Simultaneous Localization and Mapping (SLAM): Toward Exact Localization without Explicit Localization. IEEE Trans. Robot. Autom. 2002, 17, 125–137. [Google Scholar] [CrossRef] [Green Version]
- Zwynsvoorde, D.V.; Simeon, T.; Alami, R. Incremental Topological Modeling Using Local Voronoï-like Graphs. In Proceedings of the 2000 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2000), Takamatsu, Japan, 31 October–5 November 2000; Volume 2, pp. 897–902. [Google Scholar]
- Hornung, A.; Wurm, K.M.; Bennewitz, M.; Stachniss, C.; Burgard, W. OctoMap: An Efficient Probabilistic 3D Mapping Framework based on Octrees. Auton. Robot. 2013, 34, 189–206. [Google Scholar] [CrossRef] [Green Version]














































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| σ | ρ | |
|---|---|---|
| before correction | 0.049 | 0.033 |
| after correction | 0.046 | 0.032 |
| (a) | (b) | |||||||
|---|---|---|---|---|---|---|---|---|
| Precision and Recall of Our System | Precision and Recall of FAB-MAP 2.0 | |||||||
| Dataset | # Images | Precision (%) | Recall (%) | Dataset | # Images | Min. p | Precision (%) | Recall (%) |
| NewCollege | 5266 | 100 | 55.92 | Malaga6L | 462 | 98% | 100 | 68.52 |
| Bicocca25b | 4924 | 100 | 81.2 | CityCentre | 2474 | 98% | 100 | 38.77 |
| Ford2 | 1182 | 100 | 79.45 | |||||
| Malaga6L | 869 | 100 | 74.75 | |||||
| CityCentre | 2474 | 100 | 30.61 | |||||
| Latest Algorithm | Hardware Requirements | Scenario | Performance | Characteristics |
|---|---|---|---|---|
| DynaSLAM [76] | monocular, stereo and RGB-D | dynamic scenarios; static map | tracked trajectory: >87.37%; average of the RPE: 0.45% |
|
| HOOFR SLAM [77] | multi and stereo camera; | urban; Karlsruhe; campus | CPU time: 62.235 ms; GPU time: 36.154 ms |
|
| PL-SLAM [78] | stereo camera; | rooms, industrial scenario | Runtime: 57.05 ms (KITTI); Runtime: 37.48 ms (EuRoC) |
|
| CubeSLAM [79] | monocular camera | Indoor; outdoor | Mean tans error: 4.42 m; Mean depth error: 4.9%; Runtime: 365.2 ms |
|
| DOORSLAM [80] | two quadcopters featuring stereo cameras | football field; | Threshold (1%): ATE (2.1930 m); Threshold (75%): ATE (18.255 m) |
|
| DymSLAM [81] | stereo camera;laser scanner; | indoor; corridors | RSEM of moving object: Position [cm]: 10.81; Rotation [°]: 2.0472 |
|
| TIMA SLAM [82] | multi-camera System | hall; laboratory; corridors | EuRoC/ASL: 0.023; KITTI odometry: 0.58 |
|
| FSD-SLAM [83] | monocular camera | indoor | ATE: 0.018793 m RPE: 0.028753 m |
|
| DSP-SLAM [84] | monocular, stereo, stereo + LiDAR | cars; chairs | Faster iteration time: 4 s; Fewer iterations: 10 |
|
| RMS of Localization Error (m) | RMS of Tracking Error (m) | |
|---|---|---|
| Circular trajectory | 0.067 | 0.131 |
| 3D trajectory | 0.077 | 0.219 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jia, G.; Li, X.; Zhang, D.; Xu, W.; Lv, H.; Shi, Y.; Cai, M. Visual-SLAM Classical Framework and Key Techniques: A Review. Sensors 2022, 22, 4582. https://doi.org/10.3390/s22124582
Jia G, Li X, Zhang D, Xu W, Lv H, Shi Y, Cai M. Visual-SLAM Classical Framework and Key Techniques: A Review. Sensors. 2022; 22(12):4582. https://doi.org/10.3390/s22124582
Chicago/Turabian StyleJia, Guanwei, Xiaoying Li, Dongming Zhang, Weiqing Xu, Haojie Lv, Yan Shi, and Maolin Cai. 2022. "Visual-SLAM Classical Framework and Key Techniques: A Review" Sensors 22, no. 12: 4582. https://doi.org/10.3390/s22124582
APA StyleJia, G., Li, X., Zhang, D., Xu, W., Lv, H., Shi, Y., & Cai, M. (2022). Visual-SLAM Classical Framework and Key Techniques: A Review. Sensors, 22(12), 4582. https://doi.org/10.3390/s22124582