1. Introduction
Robotic systems generally have nonlinear dynamics and are subject to model uncertainties and disturbances. Moreover, many robotic systems are underactuated, i.e., having fewer independent control inputs than degrees of freedom, including fixed-wing aircraft, quadrotors and dynamic walking robots. The design of tracking controllers for underactuated robotic systems is a much more challenging problem compared to that for fully-actuated systems. Recently, the concept of a control contraction metric (CCM) was introduced in [
1] to synthesize trajectory tracking controllers for general nonlinear systems, including underactuated ones. The CCM extends contraction theory [
2] from analysis to constructive control design, while contraction theory is focused on analyzing nonlinear systems in a differential framework by studying the convergence between pairs of state trajectories toward each other. It was shown in [
3] that CCM reduces to conventional sliding and energy-based designs for fully-actuated systems. On the other hand, for underactuated systems, compared to prior approaches based on local linearization [
4], the CCM approach leads to a convex optimization problem for controller synthesis and generates controllers that stabilize
every feasible trajectory in a region, instead of just a single target trajectory that must be known a priori [
3].
On the other hand, control design methods to deal with dynamic uncertainties in the deterministic setting can be roughly classified into adaptive and robust approaches. Robust approaches, such as
control [
5],
synthesis [
6] and robust/tube model predictive control (MPC) [
7,
8], usually consider parametric uncertainties or bounded disturbances and aim to find controllers with performance guarantees for the worst case of such uncertainties. The consideration of worst-case scenarios associated with robust approaches often leads to conservative nominal performance. Disturbance–observer (DOB) based control and related methods such as active disturbance rejection control (ADRC) [
9] lump all uncertainties that may include parametric uncertainties, unmodeled dynamics and external disturbances, together as a “total disturbance”, estimate it via an observer and then compute control actions to compensate for the estimated disturbance [
10] to recover the nominal performance. However, for state-dependent uncertainties, DOB-based control methods usually ignore the dependence of “disturbance” on system states and rely on assumptions on the derivative of the “disturbance” that are difficult to verify for theoretical guarantees [
10,
11]. Alternatively, adaptive control methods such as model reference adaptive control (MRAC) [
12] usually need a parametric structure for the uncertainties, rely on online estimation of the parameters for control law construction and provide asymptotic performance guarantees in most cases. One of the exceptions is
adaptive control [
13] that does not need a parameterization of the uncertainties (similar to DOB-based control) and focuses on transient performance guarantees in terms of uniformly bounded error between the ideal and uncertain systems.
Both robust and adaptive control approaches have been explored in the context of CCM-based control in the presence of uncertainties and disturbances. In particular, adaptive control was combined with CCM to handle nonlinear control-affine systems with both parametric [
14] and non-parametric uncertainties [
15]. The case of bounded disturbances in CCM-based control was addressed by leveraging input-to-state stability analysis [
16] or robust CCM [
17,
18]. CCM for stochastic systems was developed in [
19] to minimize the mean squared tracking error in the presence of stochastic disturbances. Closely relevant to this paper, [
15] designed an
adaptive controller to augment a baseline CCM-based controller to compensate for matched nonlinear non-parametric uncertainties that can depend on both time and states. The authors of [
15] proved that transient tracking performance was guaranteed in the sense that the actual state trajectory exponentially converges to a neighborhood or a tube around the desired one. Compared to [
15], our approach relies on a disturbance observer that yields an estimation error bound and robust Riemannian energy condition and ensures that the actual state trajectory exponentially converges to the nominal one.
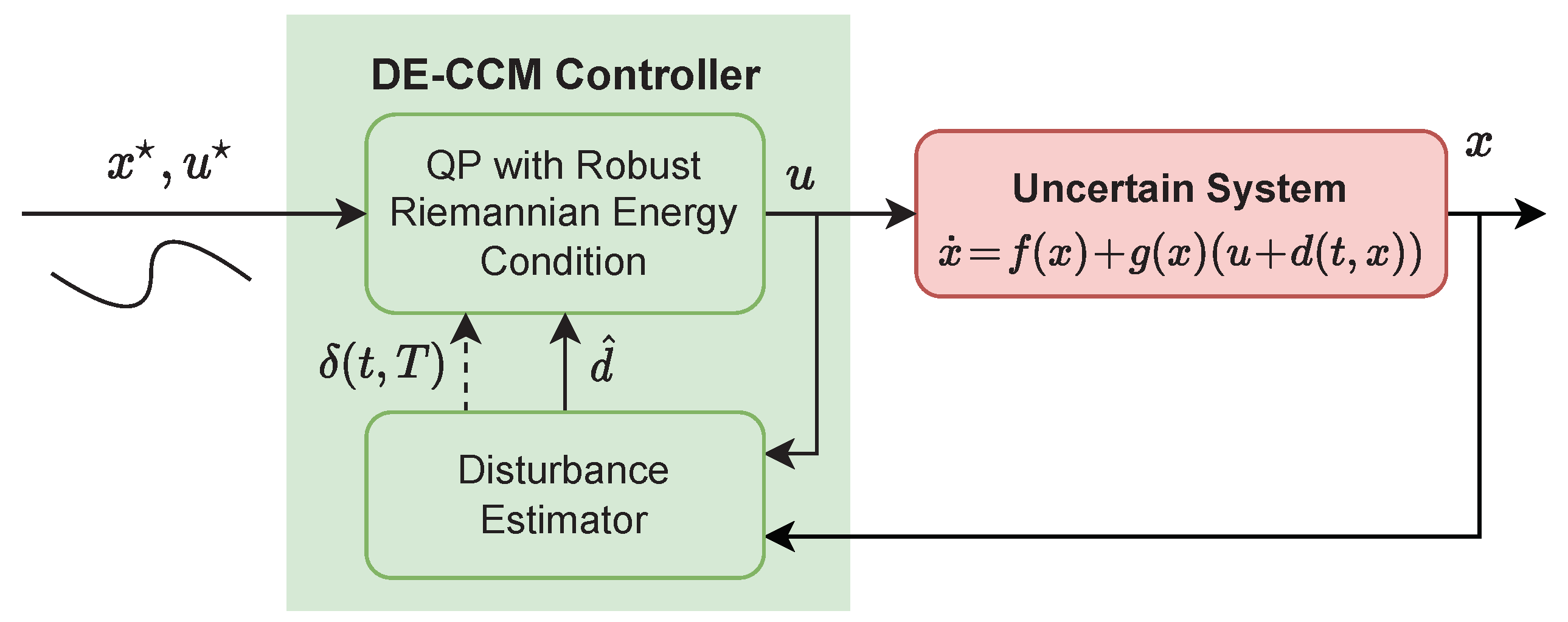
Statement of Contributions: We present a tracking controller for nonlinear systems subject to matched uncertainties that can depend on both time and states based on contraction metrics and disturbance estimation. Our controller leverages a disturbance estimator to estimate the pointwise value of the uncertainties, with a pre-computable estimation error bound. The estimated disturbance and the estimation error bound are then incorporated into a robust Riemannian energy condition to compute the control law that guarantees exponential convergence of actual state trajectories to nominal ones. We validate the efficacy of our controller on two simulation examples and demonstrate its advantages over existing controllers.
The idea presented in this paper is leveraged in [
20] for safe learning of uncertain dynamics using deep neural networks. Compared to [
20], this paper is not relevant to learning and allows the uncertainty to be dependent on both time and states, as opposed to the dependence on states only in [
20]. Additionally, this paper includes an additional aircraft example for performance illustration and conducts extensive comparisons with existing adaptive approaches in simulations that are not available in [
20].
Notations: Let , and denote the n-dimensional real vector space, the set of non-negative real numbers and the set of real m by n matrices, respectively. I and 0 denote an identity matrix, and a zero matrix of compatible dimensions, respectively; ‖·‖ denotes the 2-norm of a vector or a matrix. For a vector y, denotes its ith element. For a matrix-valued function and a vector , denotes the directional derivative of along y. For symmetric matrices P and Q, () means is positive definite (semidefinite). is the shorthand notation of . Finally, ⊖ denotes the Minkowski set difference.
2. Problem Statement and Preliminaries
Consider a nonlinear control-affine system with uncertainties
where
is the state vector,
is the control input vector,
and
are known and locally Lipschitz continuous functions, and
represents the
matched model uncertainty that can depend on both time and states. We assume that
has full column rank for any
. Suppose
is a compact set that contains the origin, and the control constraint set
is defined as
, where
denote the lower and upper bounds of all control channels, respectively. Furthermore, we make the following assumptions on
and
.
Assumption 1. There exist known positive constants , , and such that for any and , the following inequalities hold: Remark 1. Assumption 1 indicates that the uncertain function is locally Lipschitz in both t and x with known Lipschitz constants and is uniformly bounded by a known constant in the compact set .
In fact, given the local Lipschitz constants
and
, a uniform bound on
in
can always be derived by using Lipschitz continuity properties if the bound on
for an arbitrary
in
and any
is known. For instance, assuming
, from (3), we have
for any
and
. In practice, some prior knowledge about the actual system and the uncertainty may be leveraged to obtain a tighter bound than the one based on the Lipschitz continuity explained earlier, which is why we directly make an assumption on the uniform bound. With Assumption 1, we will show (in
Section 3.3) that the pointwise value of
at any time
t can be estimated with a pre-computable estimation error bound.
For the system in (1), assume we have a nominal state and input trajectory,
and
, which satisfy the nominal, i.e., uncertainty-free, dynamics:
We would like to design a state-feedback controller in the form of
so that the actual state trajectory
exponentially converges to the nominal one
. Our solution is based on CCM and disturbance estimation. Next, we briefly review CCM for uncertainty-free systems.
Control Contraction Metrics (CCMs)
We first introduce some notations related to Riemannian geometry, most of which are from [
1]. A Riemannian metric on
is a symmetric positive-definite matrix function
, smooth in
x, which defines a “local Euclidean” structure for any two tangent vectors
and
through the inner product
and the norm
. A metric is called
uniformly bounded if
holds
and for some scalars
. Let
be the set of smooth paths connecting two points
a and
b in
, where each
is a piecewise smooth mapping,
, satisfying
. We use the notation
, and
. Given a metric
and a curve
, we define the Riemannian energy of
as
. The Riemannian energy between
a and
b is defined as
.
Contraction theory [
2] draws conclusions on the convergence between pairs of state trajectories toward each other by studying the evolution of the distance between any two infinitesimally close neighbouring trajectories. CCM generalizes contraction analysis to the controlled dynamics setting in which the analysis jointly searches for a controller and a metric that describes the contraction properties of the resulting closed-loop system. Following [
1,
14], we now briefly review CCMs by considering the nominal, i.e., uncertainty-free, system:
where
and
. The differential form of (7) is given by
where
with
denoting the
ith column of
. Consider a function
for some positive definite metric
, which can be viewed as the Riemannian squared differential length at point
x. Differentiating and imposing that the squared length decreases exponentially with rate
, one obtains
where
. We first recall some basic results related to CCM.
Definition 1 ([
1]).
The system (7) is said to be universally exponentially stabilizable if, for any feasible desired trajectory and , a feedback controller can be constructed that for any initial condition , a unique solution to (7) exists and satisfies where λ and R are the convergence rate and overshoot, respectively, independent of the initial conditions. Lemma 1 ([
1]).
If there exists a uniformly bounded metric M(x), i.e., for some positive constants and , such that for all x and satisfying ,hold, then the system (7) is universally exponentially stabilizable in the sense of Definition 1 via continuous feedback defined almost everywhere, and everywhere in the neighborhood of the target trajectory with the convergence rate λ and overshoot . The condition (9) ensures that the dynamics orthogonal to the input are contracting, i.e., (8) holds in the presence of
and is often termed as the strong CCM condition [
1]. In particular, the condition (9b) can be satisfied by enforcing that each column of
forms a killing vector field for the metric
, i.e.,
for all
. The CCM condition (9) can be transformed into a convex constructive condition for the metric
by a change of variables. Let
(commonly referred to as the
dual metric), and
be a matrix whose columns span the null space of the input matrix
B (i.e.,
). Then, condition (9) can be cast as convex constructive conditions for
:
The existence of a contraction metric
is sufficient for stabilizability via Lemma 1. What remains is constructing a feedback controller that achieves the universal exponential stabilizability (UES). As mentioned in [
1,
16], one way to derive the controller is to interprete the Riemann energy,
, as an incremental control Lyapunov function and use it to construct a min-norm controller that renders for any time
tSpecifically, at any time
, given the metric
and a desired/actual state pair
, a minimum-energy path, i.e., a geodesic,
connecting these two states (i.e.,
and
), can be computed (e.g., using the pseudospectral method in [
21] to solve a nonlinear programming problem). Consequently, the Riemannian energy of the geodesic is defined as
, where
, can be calculated. As noted in [
16], from the formula for the first variation of energy [
22],
. Therefore, (11) can be rewritten as
where
and
. Therefore, the control signal with a minimum norm for
can then be obtained by solving the following quadratic programming (QP) problem:
at each time
t, which is guaranteed to be feasible under condition (9) [
1]. The minimization problem (13) is often termed as the
pointwise min-norm control problem and has an analytic solution [
23]. The above discussions can be summarized in the following theorem. The proof is trivial by following Lemma 1 and the subsequent discussions and is thus omitted.
Theorem 1 ([
1]).
Given a nominal system (7), assume that there exists a uniformly bounded metric that satisfies (10) for all . Then, the control law constructed by solving (13) with , universally exponentially stabilizes the system (7) in the sense of Definition 1, where with and being two positive constants satisfying . Remark 2. According to Definition 1 and Theorem 1, under the conditions of Theorem 1, given any feasible trajectory () of (7), a controller can always be constructed to ensure that the actual state trajectory exponentially converges to .
3. Robust Trajectory Tracking Using CCM and Disturbance Estimation
In
Section 2, we have shown that existence of a CCM for a
nominal (i.e., uncertainty-free) system can be used to construct a feedback control law to guarantee the universal exponential stabilizability (UES) of the system. In this section, we present a controller based on CCM and disturbance estimation to ensure the UES of the uncertain system (1), whose architecture is depicted in
Figure 1.
3.1. CCMs for the Actual System
To apply the contraction method to design a controller to guarantee the UES of the uncertain system (1), we need to first search a valid CCM for it. Following
Section 2, we can derive the counterparts of the strong CCM condition (9) or (10). Due to the particular structure with (1) attributed to the matched uncertainty assumption, we have the following lemma. A similar observation has been made in [
14] for the case of matched parametric uncertainties. The proof is straightforward and thus omitted. One can refer to [
14] for more details.
Lemma 2. The strong (dual) CCM condition for the uncertain system (1) is the same as the strong (dual) CCM condition, i.e., (9) and (10), for the nominal system.
Remark 3. As a result of Lemma 2, a metric (dual metric ) satisfying the condition (9) and (10) for the nominal system (7) is always a CCM (dual CCM) for the true system (1).
Define
, where
is introduced in Assumption 1. Assumption 1 indicates
for any
and
. As mentioned in
Section 2, given a CCM and a desired trajectory
and
for a nominal system, a control law can be constructed to ensure exponential convergence of the actual state trajectory
to the desired state trajectory
. In practice, we have access to only the nominal dynamics (5) instead of the true dynamics to plan a trajectory
and
. The following lemma gives the condition when
, planned using the nominal dynamics (5), is also a feasible state trajectory for the true system.
Lemma 3. Given a desired trajectory and satisfying the nominal dynamics (5) with , if then is also a feasible state trajectory for the true system (1). Proof.
Define . Since and , which is due to and Assumption 1, we have . By comparing the dynamics in (1) and (5), we conclude that and satisfy the true dynamics (1) and thus are a feasible state and input trajectory for the true system. □
Lemma 3 provides a way to verify whether a trajectory planned using the nominal dynamics is a feasible trajectory for the true system in the presence of actuator limits. In the absence of such limits, any feasible trajectory for the learned dynamics is also a feasible trajectory for the true dynamics due to the particular structure of (1) associated with the matched uncertainty assumption.
3.2. Robust Riemannian Energy Condition
Section 2 shows that, given a nominal system and a CCM for such a system, a control law can be constructed via solving a QP problem (13) with a condition to constrain the decreasing rate of the Riemannian energy, i.e., condition (12). When considering the uncertain dynamics in (1), the condition (12) becomes
where
represents the true dynamics evaluated at
, and
as defined in (5). Several observations follow immediately. First, it is clear that (15) is
not implementable due to its dependence on the true uncertainty
through
. Second, if we could have access to the
pointwise value of
at each time
t, (15) will become implementable even when we do not know the exact functional representation of
. Third, if we could estimate the pointwise value of
at each time
t with a bound to quantify the estimation error, then we could derive a robust condition for (15). Specifically, assume
is estimated as
at each time
t with a uniform estimation error bound (EEB)
, i.e.,
Then, we could immediately get the following sufficient condition for (15):
where
Moreover, since
satisfies the CCM condition (9),
that satisfies (
16) is guaranteed to exist for any
, regardless of the size of
, if the input constraint set
is sufficiently large. We term condition (16) the
robust Riemannian energy (RRE) condition.
3.3. Disturbance Estimation with a Computable EEB
We now introduce a disturbance estimation scheme to estimate the pointwise value of the uncertainty
with a pre-computable EEB, which can be systematically improved by tuning a parameter in the estimation law. The estimation scheme is based on the piecewise-constant estimation (PWCE) law in [
24], which was originally from [
25]. The PWCE law consists of two elements, namely a state predictor and a piecewise-constant update law. The state predictor is defined as:
where
is the prediction error, and
a is an arbitrary positive constant. The estimation,
, is updated in a piecewise-constant way:
where
T is the estimation sampling time, and
. Finally, the pointwise value of
at time
t is estimated as
where
is the pseudoinverse of
. The following lemma establishes the EEB associated with the estimation scheme in (
18) and (
19). The proof is similar to that in [
24]. For completeness, it is given in
Appendix A.
Lemma 4. Given the dynamics (1) subject to Assumption 1, and the estimation law in (18) and (19), if and for any , the estimation error can be bounded as wherewith constants , and from Assumption 1, and ϕ defined in (23). Moreover, for any . Remark 4. Lemma 4 implies that theoretically, for , the disturbance estimation after a single sampling interval can be made arbitrarily accurate by reducing T, which further indicates that the conservatism with the RRE condition can be arbitrarily reduced after a sampling interval.
In practice, the value of
T is subject to the limitations related to computational hardware and sensor noise. Additionally, using a very small
T tends to introduce high frequency components in the control loop, potentially harming the robustness of the closed-loop system, e.g., against time delay. This is similar to the use of a high adaptation rate in model reference adaptive control schemes as discussed in [
13]. Therefore, one should avoid the use of a very small
T for the sake of robustness unless a low-pass filter is used to filter the estimated disturbance before fed into (16), as suggested by the
adaptive control theory [
13].
Remark 5. The estimation in cannot be arbitrarily accurate. This is because the estimation in depends on according to (19). Considering that is purely determined by the initial state of the system, , and the initial state of the predictor, , it does not contain any information of the uncertainty. Since T is usually very small in practice, lack of a tight estimation error bound for the interval will not cause an issue from a practical point of view. Additionally, the estimation of ϕ defined in (23) could be quite conservative. Further considering the frequent use of Lipschitz continuity and inequalities related to matrix/vector norms in deriving the constant , can be overly conservative. Therefore, for practical implementation, one should leverage some empirical study, e.g., performing simulations under a few user-selected functions of and determining a bound for . In our experiments, we found the theoretical bound computed according to (21) was usually at least 10 and could be times more conservative. 3.4. Exponentially Convergent Trajectory Tracking
Based on the review of contraction control in
Section 2 and the discussions in
Section 3.2 and
Section 3.3, the control law can be obtained by solving the following QP problem at each time
t:
subject to
where
, according to (17), depends on
, which is from the disturbance estimation law defined by (18) to (20),
as defined in (21), and
as defined in (5). Similar to (13), problem (24) is a pointwise min-norm control problem and has an analytic solution [
23]. Specifically, denoting
and
, (25) can be written as
, and the solution for (24) is given by
To move forward with analysis, we need to verify that when , the control signal resulting from solving the QP problem (24) satisfies . Deriving verifiable conditions to ensure this set bound is outside the scope of this paper and will be addressed as future work. We are now ready to state the main result of the paper.
Theorem 2. Given an uncertain system represented by (1) satisfying Assumption 1, assume that there exists a metric such that for all , (10) holds and holds for positive constants and . Furthermore, suppose that a nominal trajectory () planned using the nominal dynamics (5) and the initial actual states satisfy (14) andfor any . Then, if from solving (24) satisfies for any , the control law constructed by solving (24) ensures for any , and furthermore, universally exponentially stabilizes the uncertain system (1) in the sense of Definition 1 with , i.e., Proof.
We use contradiction to show
for all
. Assume this is not true. According to (27),
. Since
is continuous, there must exist a time
such that
Now let us consider the system evolution in . Since by assumption and for any t in , the EEB in (21) holds in . As a result, the control law obtained from solving (24) ensures satisfaction of the RRE condition (16) and thus satisfaction of the Riemannian energy condition (15) for the uncertain system (1), and thereby universally exponentially stabilizes the uncertain system (1) in , in the sense of Definition 1 with , according to Theorem 1. On the other hand, satisfaction of (14) implies that is a feasible state trajectory for the uncertain system (1) according to Lemma 3. Further considering Theorem 1, we have for any t in . Due to (27), the preceding inequality indicates that remains in the interior of for t in . This, together with the continuity of , immediately implies , which contradicts (29). Therefore, we conclude that for all . From the development of the proof, it is clear that with the control law given by the solution of (24), the UES of the closed-loop system in the sense of Definition 1 with for all is achieved, which is mathematically represented by (28). The proof is complete. □
3.5. Discussion
Theorem 2 essentially states that under certain assumptions, the proposed controller guarantees exponential convergence of the actual state trajectory
to a desired one
. With the exponential guarantee, if the actual trajectory meets the desired trajectory at certain time
, then these two trajectories will stay together afterward. While the exponential convergence guarantee is stronger than the performance guarantees provided by existing adaptive CCM-based approaches [
14,
15] that deal with similar settings (i.e., matched uncertainties), the proposed method requires the knowledge of the Lipschitz bound of the uncertainty
and the input matrix function
to be in a compact set known a priori (see Assumption 1), and the actual control inputs to stay in a compact set known a priori, which cannot be verified at this moment due to the lack of a bound on the control inputs. These requirements are not needed in [
14,
15].
The approach here is related to the robust control Lyapunov-based approaches [
23] which provide robust stabilization around an equilibrium point (as opposed to a trajectory considered in this paper) in the presence of uncertainties.
Remark 6. The exponential convergence guarantee stated in Theorem 2 is based on a continuous-time implementation of the controller. In practice, a controller is normally implemented on a digital processor or controller with a fixed sampling time. As a result, the property of exponential convergence may be slightly violated.
Computational cost: As can be seen from
Section 2 and
Section 3.2,
Section 3.3 and
Section 3.4, computation of the control signal at each time
t includes three steps: (i) updating the estimated disturbance
via (18) to (20), (ii) computing the geodesic
connecting the actual and nominal states (see the discussion below (11)), and (iii) computing the control signal
via (26). The computation costs of steps (i) and (iii) are quite low as they only involve integration and algebraic calculation. In comparison, step (ii) has a relatively high computational cost as it necessitates solving a nonlinear programming (NLP) problem. However, since the NLP problem does not involve dynamic constraints, it is much easier to solve than a nonlinear model predictive control (MPC) problem [
21]. Following [
21], such a problem can be efficiently solved by applying a pseudospectral method.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}