The flow diagram of the underactuated manipulator design method based on the metamorphic mechanism proposed in this paper is shown in
Figure 1. We first describe the metamorphic mechanism and the underactuated principle, which was used to establish the underactuated manipulator model. Then, we analyzed the configuration of fingers in different stages during the grasping process of the manipulator. To provide help for the design and optimization of the underactuated finger, the contact force of the finger was analyzed according to the static model of the finger and the principle of virtual work. Furthermore, we set up the objective function and design variables and used the genetic algorithm to optimize the finger structure parameters of the underactuated manipulator. In this way, the underactuated manipulator could grasp the stability and the finger knuckle’s contact force as uniformly as possible. The underactuated manipulator model, kinematics analysis, contact force analysis, and finger structural parameter optimization mentioned in the proposed method are detailed as follows.
2.1. Structure and Working Principle of the Underactuated Manipulator
In the development process of robot dexterous hands, most mechanical hands are rigid bodies and rely on the movement of fingers to grasp, which limits the range of movement and dexterity of fingers. To improve the flexibility of the manipulator, only the method of increasing the number of fingers has been adopted in the past. To break through the limitation of the fixed palm of the traditional manipulator, this study designed an underactuated manipulator based on the principle of the mutation cell, which is driven by a motor and controlled by the manipulator.
In the cycle with multiple working stages, the multi-degree-of-freedom motion chain with a closed loop presents different topological structure forms, and the mechanism with different functions by combining its frame and original moving parts is called the metamorphic mechanism.
When the number of actuators of a mechanism is less than the number of degrees of freedom of the mechanism, the mechanism is underactuated.
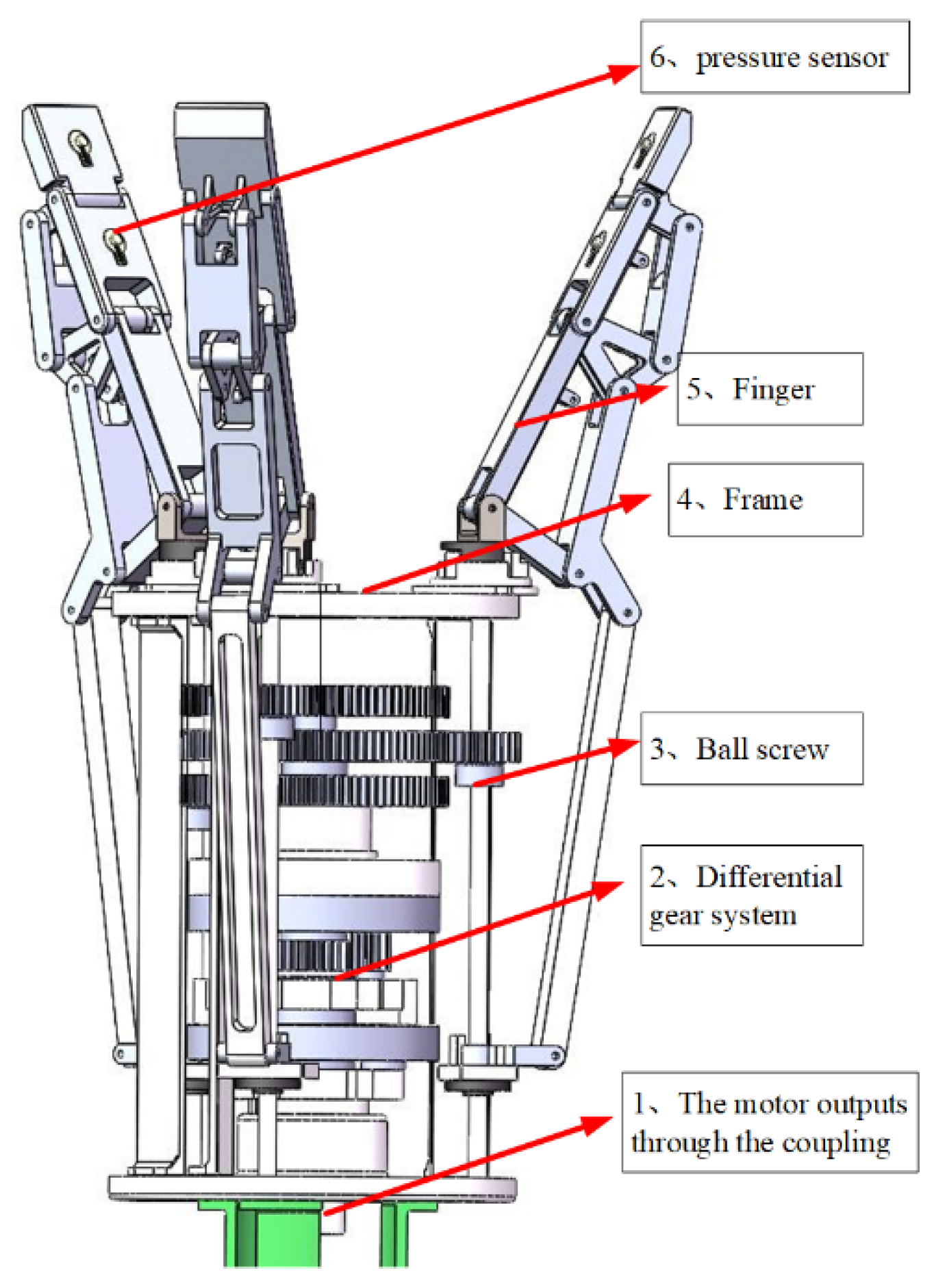
The overall structure of the underdrive hand is shown in
Figure 2. The underdrive manipulator is composed of a driving motor, a transmission mechanism (ball screw and differential gear system), a frame, and three underdrive fingers. The manipulator uses a motor to drive three fingers to complete the grasp of the object, with 9 degrees of freedom.
The underactuated finger, as shown in
Figure 3, consists of two tension springs and nine connecting rods. Tension spring 1 is located between rods 4 and 5. Tension spring 2 is located between rods 7 and 8. Rods 4, 7, and 8 represent the first, second, and third knuckles, respectively, and rod 9 is the frame. The revolute joints are points B, C, D, E, F, G, H, and I. The linear drive is located at point A, and drive point A moves along the dotted line MN.
When the finger mechanism of the underactuated manipulator grasps the object, the drive moves along the direction of MN. Connecting rod 1 rotates through joint A, connecting rod 2 moves through joint B, connecting rod 3 moves through joint D, and connecting rod 4 (first knuckle) moves through joint E. Link two passes through joint C, and link four passes through joint F to move link five. The G joint drives the motion of link 6, and the F joint drives the motion of link 7 (second knuckle). Connecting rod 6 passes through the H joint while connecting rod 7 drives connecting rod 8 (third knuckle) through the I joint until the finger is in contact with the grabbed object and the envelope grasp is completed.
2.2. Kinematic Analysis of Grasping Objects with Fingers
To analyze the movement of the finger mechanism based on the metamorphic mechanism in the grasping process, finger states in different grasping stages are divided into the first configuration, the second configuration, and the third configuration.
First configuration: the finger mechanism is initially in a free state, that is, all knuckles have no contact with the object being grabbed.
Second configuration: the first knuckle of the finger mechanism is in contact with the object; the first knuckle is fixed, and the second and third knuckles rotate and are always in the same plane.
In the third configuration, the first and second knuckles of the finger mechanism are in contact with the object, and the third knuckle rotates.
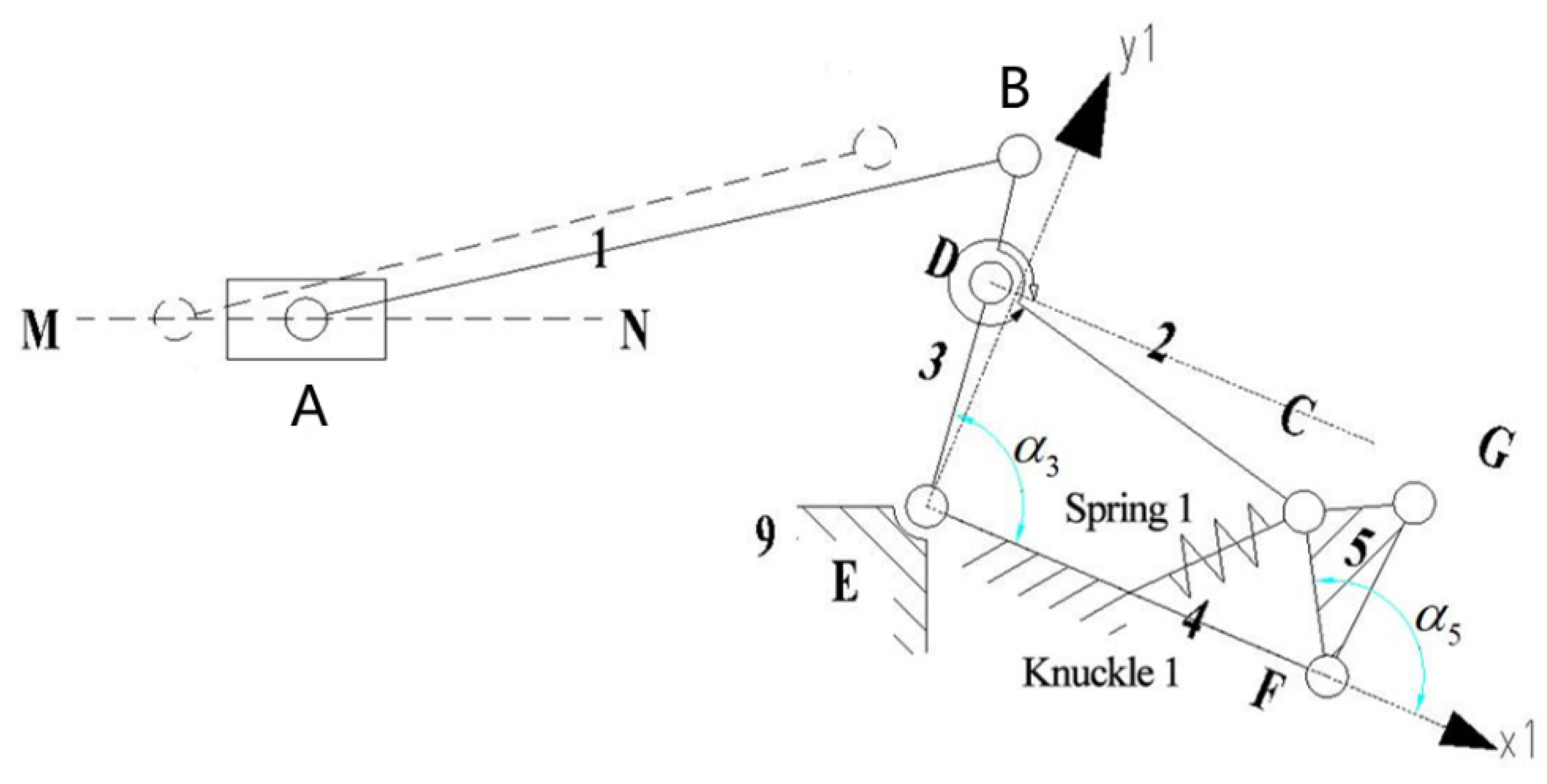
2.2.1. Kinematics Modeling in the First Configuration
The finger mechanism is active at the beginning and can be simplified as an equivalent crank slider mechanism ABE, as shown in
Figure 4.
represents the rod length,
.
represents the angle variable between the forward direction of the X-axis and each bar.
The original moving part is the slide block, and its moving speed is /s. Then, the motion rule of the slide block is , where is the initial value of . The crank slider mechanism offset size is .
According to the geometrical relation between and , the vector equation can be obtained: .
It is derived from Euler’s equations:
Subtracting
from (1) gives:
It can be solved from (2) that:
It should be taken in the crank slider mechanism:
Substituting into (1) obtains:
2.2.2. Kinematics Modeling in the Second Configuration
When the first knuckle is in contact with the captured object, as shown in
Figure 5.the finger mechanism can be simplified to the equivalent mechanism EDCF.
For four-bar mechanism EDCF, the cartesian coordinate system is established with node E as the origin and rod
as the X-axis, and the vector equation can be obtained:
It is derived from Euler’s equations:
In the equation,
; (7) can be simplified as:
Subtracting
from (8) gives:
It should be taken in the EDCF four-bar mechanism:
The following can be obtained by substituting
into (8):
2.2.3. Kinematics Modeling in the Third Configuration
When the second knuckle is in contact with the grasping object, it is the third configuration, as shown in
Figure 6. At this point, the first and second knuckles remain static, and the third knuckle rotates around node I. The underactuated manipulator finger mechanism can be regarded as the linkage mechanism of two four-bar mechanisms, EDCF and FGHI. Note that the motion of rod 5 to rod 3 is the same as in the second configuration.
For the four-bar mechanism FGHI, the cartesian coordinate system is established with node F as the origin and rod
as the X-axis, and the vector equation can be obtained:
It is derived from Euler’s equations:
For convenience and calculation, the line between point F and point 1 indicates that rod 7 is placed horizontally,
. Then, (10) can be simplified as:
Subtracting
from (11) gives:
It should be taken in the FGHI four-bar mechanism:
The following can be obtained by substituting
into (11):
2.3. Analysis of Contact Forces
To help the design and optimization of the underactuated finger, a static model of the finger was established, and its contact force was analyzed. To simplify the calculation process, the gravity of fingers and friction between fingers and objects were ignored.
The geometric and static mechanical models of the underactuated fingers are shown in
Figure 7. When the fingers grasp the objects, the active rod drives the whole finger structure to move under the action of torque
. The three knuckles of the finger grab the object in order, and the contact points with the object are
,
, and
. The three knuckles are subjected to the reaction force
,
, and
of the object. In addition, the torques produced by the elastic elements in the finger structure are
and
; contact points
,
, and
can be expressed as:
In the equation above, , , and are the lengths of the three knuckles; , and are the included angles between the first, second, and third knuckles, respectively, and the horizontal direction; , , and are the distances between the contact points on the three knuckles and the joint axis.
The contact force between the object and the finger can be expressed as:
According to the principle of virtual work:
The following can be obtained according to (12)–(14):
By multiplying both ends of (19)–(21) by
,
, and
, respectively, we obtain:
Substituting (22)–(24) into (18) can obtain:
Combining (18)–(25), the contact force can be expressed as:
According to the above, the relationship between the contact force, the contact point, and the rotation angle can be obtained. According to (26), the relationship between the contact force
at the far finger and the angle
and the distance
of the contact point can be obtained during the grasping of the object by the envelope, as shown in
Figure 8.
As shown in
Figure 8, the contact force
at the distal finger increases with the increase in the guide bar angle
. In addition, the smaller the position
of the contact point on the distal finger, the greater the contact force on the distal finger. In other words, the closer the object is to the palm, the greater the contact force; this conforms to the situation of grasping objects by hand, indicating that the design is feasible.
Similarly, according to (27), the variation relationship between the second knuckle
, angle
, and angle
can be obtained, as shown in
Figure 9.
As shown in
Figure 9, the contact force
of the second knuckle increases with the increase of the angle
. When the angle
is constant,
decreases with an increase in angle
because the third knuckle bears part of the contact force, which conforms to the situation of grasping objects by hands, indicating that the design is feasible.
Similarly, according to (28), the variation relationship between the second knuckle
, angle
, and angle
can be obtained, as shown in
Figure 10.
As can be seen in
Figure 10, the contact force
of the first knuckle decreases with an increase in angle
because the second knuckle bears part of the contact force. However, when the angle
is certain,
increases with an increase in the angle
. This is because when the third knuckle begins to bear the contact force, the envelope of the first knuckle is tighter to grasp the object, which conforms to the situation of grasping the object by hand, indicating that the design is feasible.
2.4. Optimization of Finger Structure Parameters
The purpose of the underactuated finger mechanism is to achieve a reliable grasping function, which requires enough grasping force under the action of the limited driving force; that is, enough contact force can be generated between the finger and the object, and the force not so large that it causes damage to the grasping object. For grasping the finger mechanism in a stable state, the basic requirements are that the contact force of finger knuckles is as uniform as possible, the finger mechanism is compact in design, and good force transmission characteristics.
According to (26)–(28), the calculation models of the three knuckle contact forces have two characteristics: multiple variables and multiple parameters. The calculation of contact forces is very complicated, and it is difficult to identify the influence of each parameter on the contact force, which makes it a key problem to determine the design parameters of finger mechanisms [
20].
2.4.1. Determination of Finger Structural Parameters
From the perspective of bionics, the size of objects that human hands can grasp is closely related to the length of the fingers. Therefore, the length of each finger can be determined by the size of the object to grab. Taking an apple as an example and referring to the structure size of a human finger, the length of finger knuckles is determined as , , . After determining the basic length of each knuckle of the finger mechanism, other structural parameters of the finger mechanism need to be determined.
According to the mechanical principle, when the transmission pressure angle of the mechanism is zero, the force transmission efficiency is the highest. Therefore, if
is perpendicular to
,
is perpendicular to
,
is perpendicular to
, and
is perpendicular to
, the finger mechanism can ensure the best force transmission effect, and thus the grasping state of the finger mechanism, as shown in
Figure 11, is obtained. To ensure that the finger mechanism has a high force transmission effect in the whole grasping range, this state is set at the middle value of the relative angle of the knuckle, namely
.
2.4.2. Optimization of Objective Functions and Design Variables
According to the design requirement that the finger mechanism should try to achieve the uniform distribution of the contact force of each knuckle [
17], let:
Then, the objective function of mechanism parameter optimization is:
Here are the geometric constraints:
The known parameters are , , . Due to the specific position of the finger mechanism, and are determined by the torsion spring stiffness and the initial torque . The angle parameters and as well as the connecting rod length parameters and can be expressed by the finger knuckle length parameters , , , and .
According to the contact force expression in the objective function (26)–(28),
,
,
,
,
,
were taken as the design variables of the finger mechanism. Genetic algorithm tools in MATLAB were used for analysis and calculation. The constraint range of (
,
,
,
,
,
) was (30, 25, 20, 16, 3, 50); (45, 40, 35, 25, 10, 300), the population number was selected as 5000, the stasis selection algebra was set at 50, and the weighted average change of fitness function was less than 10
−6. When any of the above conditions were met, the algorithm stopped. The algorithm was run independently several times, and the following 10 groups of data were selected to obtain the design parameters shown in
Table 1.
The fourth group of data was selected as the design parameter. Rounding the parameters, , , . Assuming the driving torque, , , , could be obtained through calculation. This conformed to the conditions of uniform stress and met the requirements of the design, therefore, it could be used as the basis of structural design.






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}