
Dynamic Distance Measurement Based on a Fast Frequency-Swept Interferometry


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
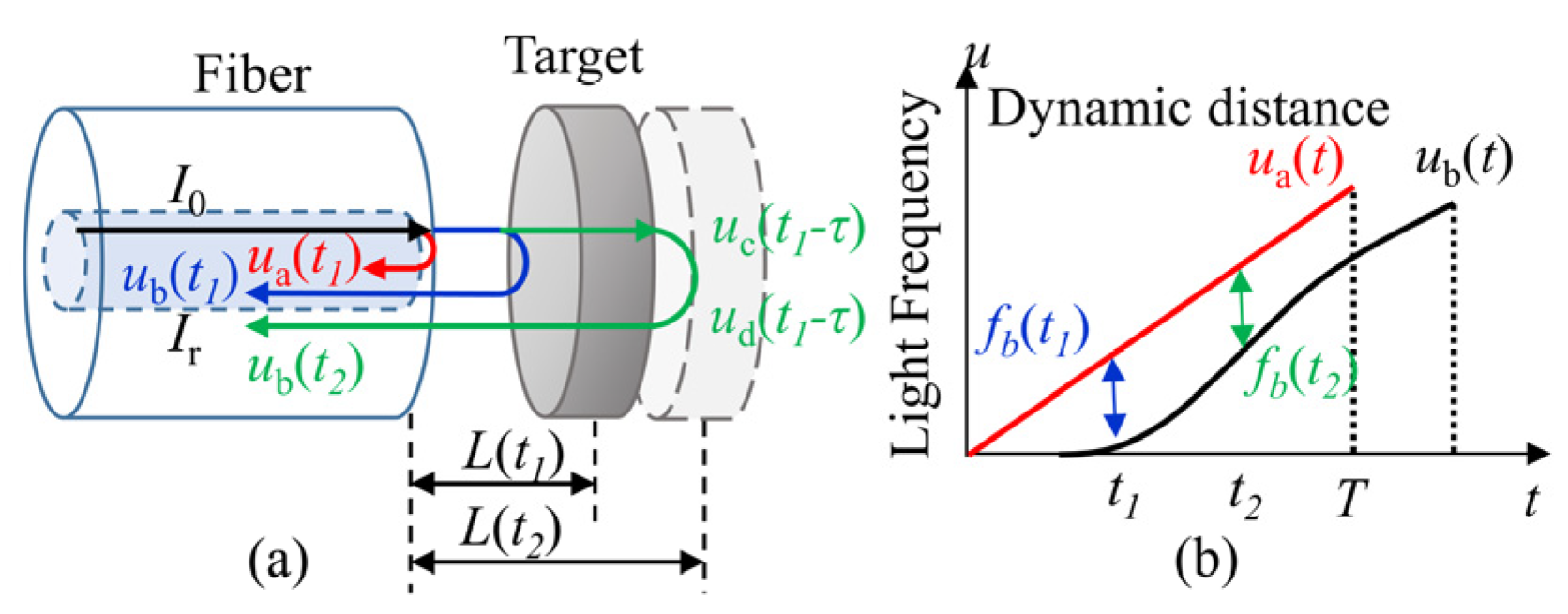
2. Principle of Reducing the Doppler-Induced Error
3. Demodulation of Dynamic Distance
3.1. Applicable Conditions of Frequency Demodulation
3.2. Demodulation Algorithm
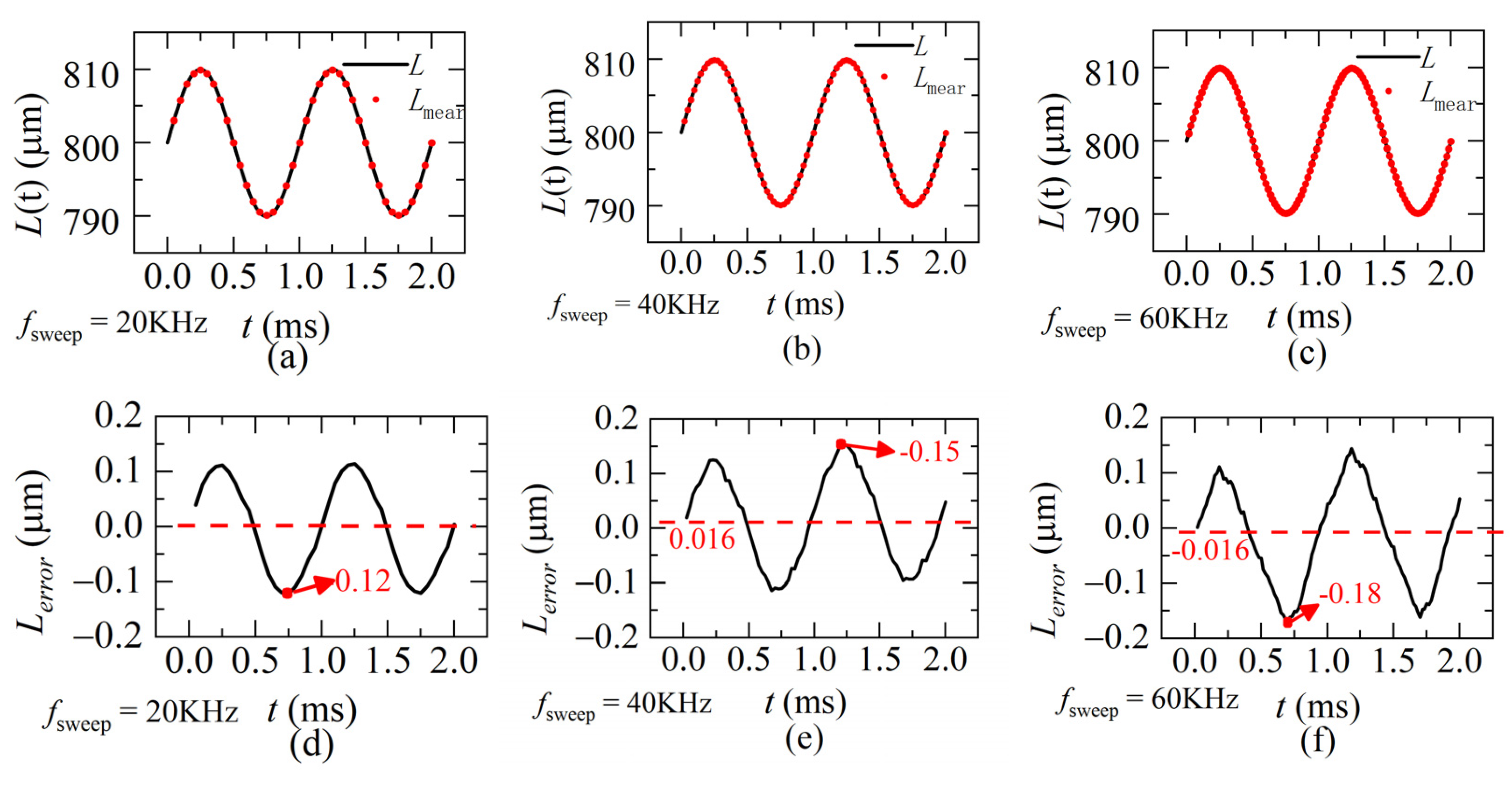
3.3. Simulation
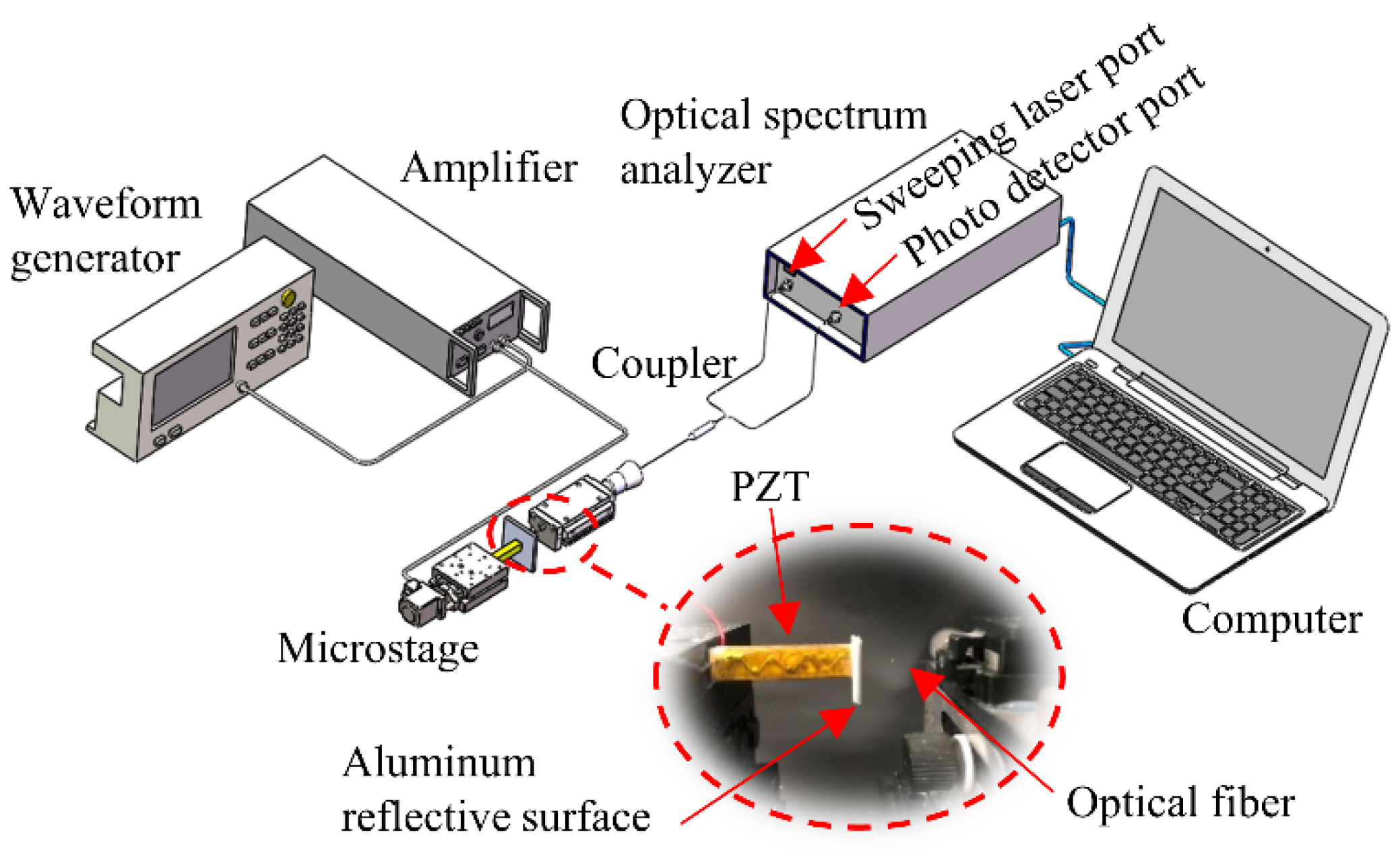
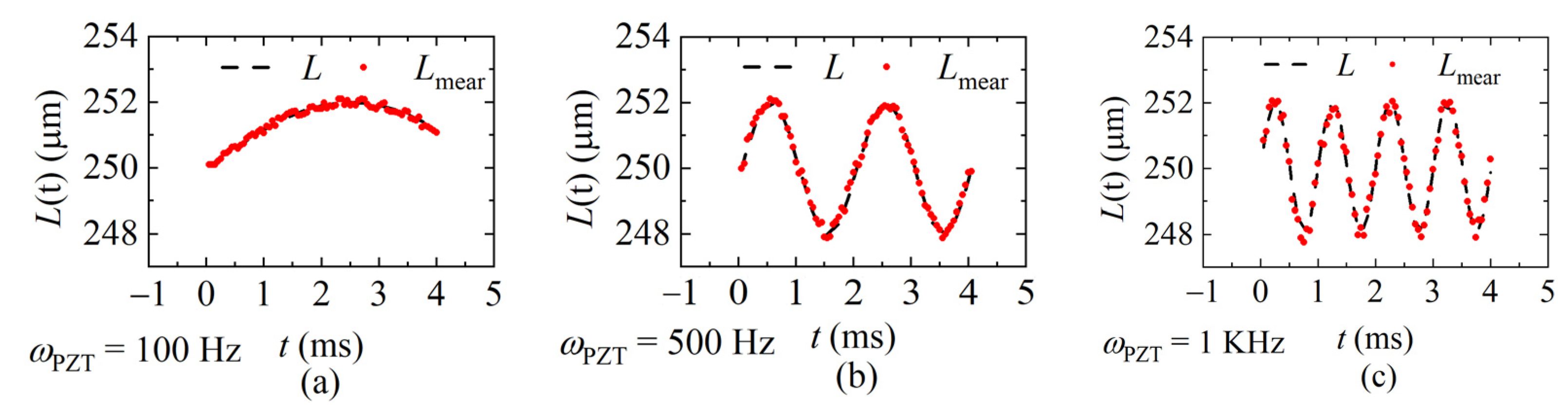
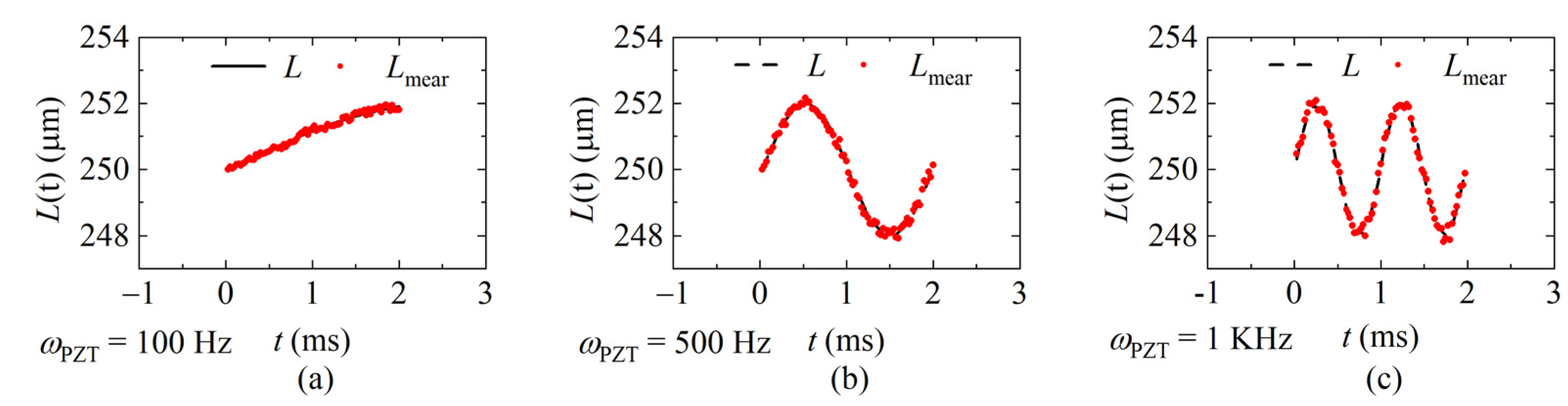
4. Experiment
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Hartmann, L.; Meiners-Hagen, K.; Abou-Zeid, A. An absolute distance interferometer with two external cavity diode lasers. Meas. Sci. Technol. 2008, 19, 045307–045313. [Google Scholar] [CrossRef]
- Tao, L.; Liu, Z.; Zhang, W.; Zhou, Y. Frequency-scanning interferometry for dynamic absolute distance measurement using Kalman filter. Opt. Lett. 2014, 39, 6997–7000. [Google Scholar] [CrossRef]
- Zhang, F.; Li, Y.; Pan, H.; Shi, C.; Qu, X. Vibration Compensation of the Frequency-Scanning-Interferometry-Based Absolute Ranging System. Appl. Sci. 2019, 9, 147. [Google Scholar] [CrossRef] [Green Version]
- Schneider, R.; Thurmel, P.; Stockman, M. Distance measurement of moving objects by frequency modulated laser radar. Opt. Eng. 2001, 40, 33–37. [Google Scholar] [CrossRef]
- Dale, J.; Hughes, B.; Lancaster, A.J.; Lewis, A.J.; Reichold, A.J.H.; Warden, M.S. Multi-channel absolute distance measurement system with sub ppm-accuracy and 20 m range using frequency scanning interferometry and gas absorption cells. Opt. Express 2014, 22, 24869–24893. [Google Scholar] [CrossRef]
- Warden, M.S. Absolute Distance Metrology Using Frequency Swept Lasers. Ph.D. Thesis, Oxford University, Oxford, UK, 2011. [Google Scholar]
- Prellinger, G.; Meiners-Hagen, K.; Pollinger, F. Spectroscopicallyin situtraceable heterodyne frequency-scanning interferometry for distances up to 50 m. Meas. Sci. Technol. 2015, 26, 084003. [Google Scholar] [CrossRef]
- Lu, C.; Xiang, Y.; Gan, Y.; Liu, B.; Chen, F.; Liu, X.; Liu, G. FSI-based non-cooperative target absolute distance measurement method using PLL correction for the influence of a nonlinear clock. Opt. Lett. 2018, 43, 2098–2101. [Google Scholar] [CrossRef]
- Shao, B.; Zhang, W.; Zhang, P.; Chen, W. Dynamic Clearance Measurement Using Fiber-Optic Frequency-Swept and Frequency-Fixed Interferometry. IEEE Photon. Technol. Lett. 2020, 32, 1331–1334. [Google Scholar] [CrossRef]
- Swinkels, B.L.; Bhattacharya, N.; Braat, J.J.M. Correcting movement errors in frequency-sweeping interferometry. Opt. Lett. 2005, 30, 2242–2244. [Google Scholar] [CrossRef] [Green Version]
- Jia, X.; Liu, Z.; Tao, L.; Deng, Z. Frequency-scanning interferometry using a time-varying Kalman filter for dynamic tracking measurements. Opt. Express 2017, 25, 25782–25796. [Google Scholar] [CrossRef] [PubMed]
- Moro, E.A.; Todd, M.D.; Puckett, A.D. Understanding the effects of Doppler phenomena in white light Fabry–Perot interferometers for simultaneous position and velocity measurement. Appl. Opt. 2012, 51, 6518–6527. [Google Scholar] [CrossRef] [PubMed]
- Gjurchinovski, A. The Doppler effect from a uniformly moving mirror. Eur. J. Phys. 2005, 26, 643–646. [Google Scholar] [CrossRef]
- Chen, X.; Wang, X.; Pan, S. Accuracy enhanced distance measurement system using double-sideband modulated frequency scanning. Opt. Eng. 2017, 56, 036114–036119. [Google Scholar] [CrossRef]
- Shang, Y.; Lin, J.; Yang, L.; Liu, Y.; Wu, T.; Zhou, Q.; Zhu, J. Precision improvement in frequency scanning interferometry based on suppression of the magnification effect. Opt. Express 2020, 28, 5822–5834. [Google Scholar] [CrossRef] [PubMed]
- Kakuma, S.; Katase, Y. Frequency Scanning Interferometry Immune to Length Drift Using a Pair of Vertical-Cavity Surface-Emitting Laser Diodes. Opt. Rev. 2012, 9, 376–380. [Google Scholar] [CrossRef]
- Jia, X.; Liu, Z.; Deng, Z.; Deng, W.; Wang, Z.; Zhen, Z. Dynamic absolute distance measurement by frequency sweeping interferometry based Doppler beat frequency tracking model. Opt. Commun. 2019, 430, 163–169. [Google Scholar] [CrossRef]
- Deng, Z.; Liu, Z.; Jia, X.; Deng, W.; Zhang, X. Dynamic cascade-model-based frequency-scanning interferometry for real-time and rapid absolute optical ranging. Opt. Express 2019, 27, 21929–21945. [Google Scholar] [CrossRef] [PubMed]






Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, Y.; Lei, X.; Xiao, L.; Zhang, P.; Liu, X. Dynamic Distance Measurement Based on a Fast Frequency-Swept Interferometry. Sensors 2022, 22, 4771. https://doi.org/10.3390/s22134771
Chen Y, Lei X, Xiao L, Zhang P, Liu X. Dynamic Distance Measurement Based on a Fast Frequency-Swept Interferometry. Sensors. 2022; 22(13):4771. https://doi.org/10.3390/s22134771
Chicago/Turabian StyleChen, Yuru, Xiaohua Lei, Lin Xiao, Peng Zhang, and Xianming Liu. 2022. "Dynamic Distance Measurement Based on a Fast Frequency-Swept Interferometry" Sensors 22, no. 13: 4771. https://doi.org/10.3390/s22134771