
Integrated Indoor Positioning System of Greenhouse Robot Based on UWB/IMU/ODOM/LIDAR


Abstract
:1. Introduction
2. Materials and Methods
2.1. Composition and Design of Positioning System
2.2. Integrated Positioning Method Based on UWB/IMU/ODOM/LIDAR
2.3. State Space Model
2.3.1. EKF Algorithm Integrates UWB/IMU/ODOM Positioning Data
2.3.2. AMCL Algorithm Fuses LIDAR Positioning Data
- (1).
- Particle initialization
- (2).
- Prediction stage
- (3).
- Measurement stage
- (4).
- Resampling
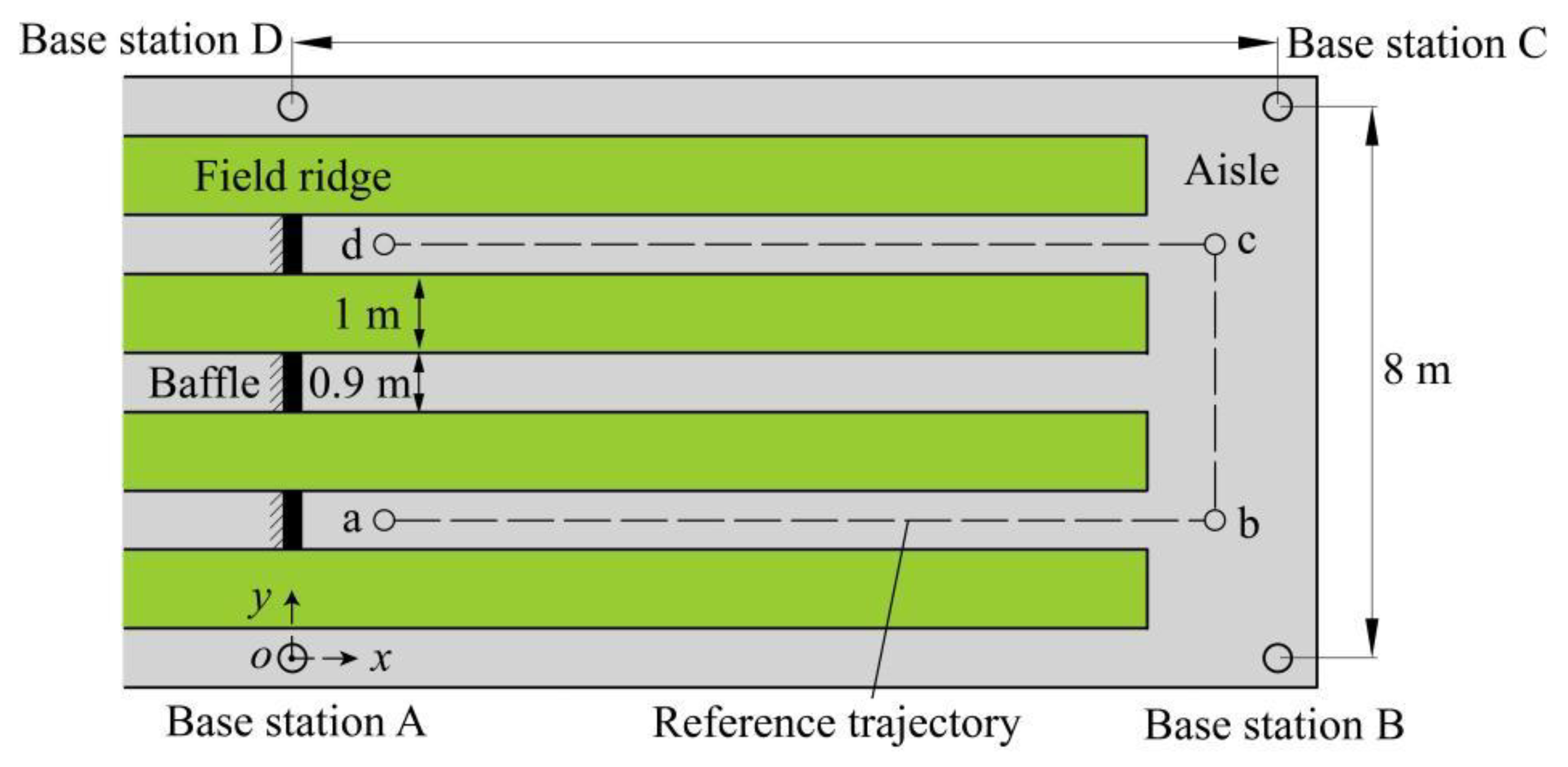
2.4. Layout of Experiment Site
3. Experiments and Results
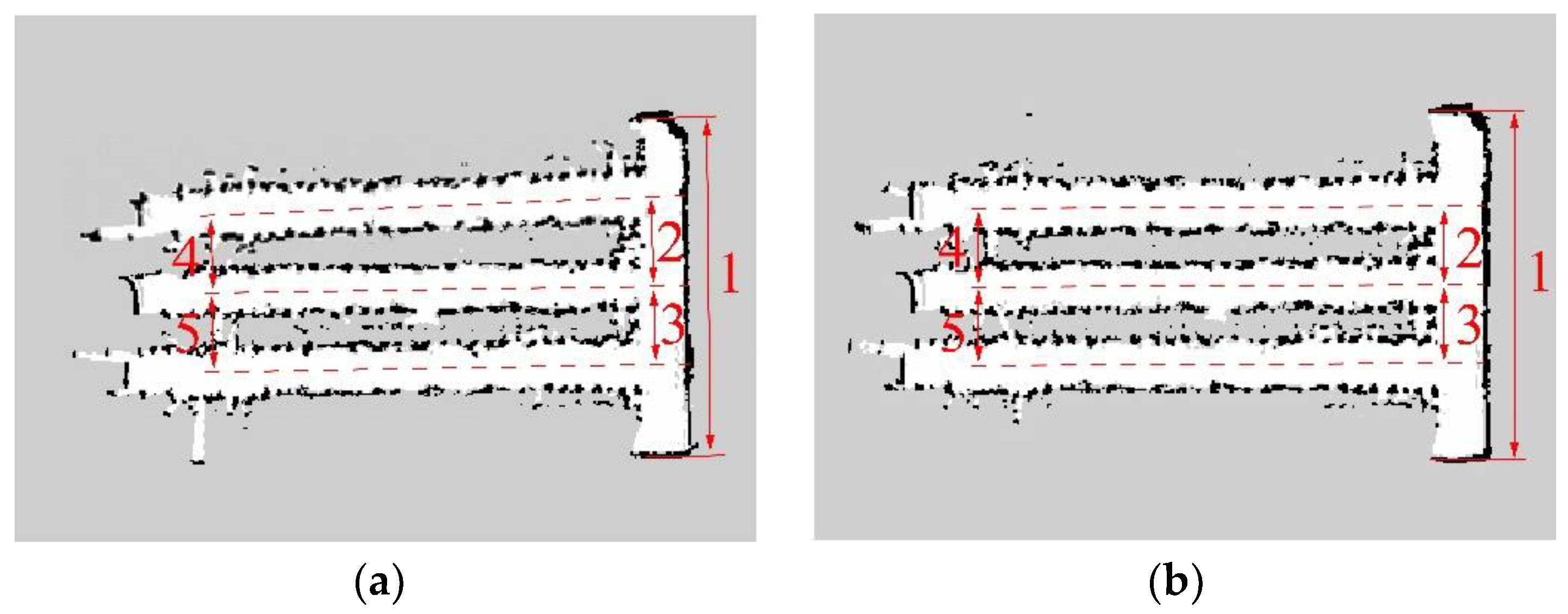
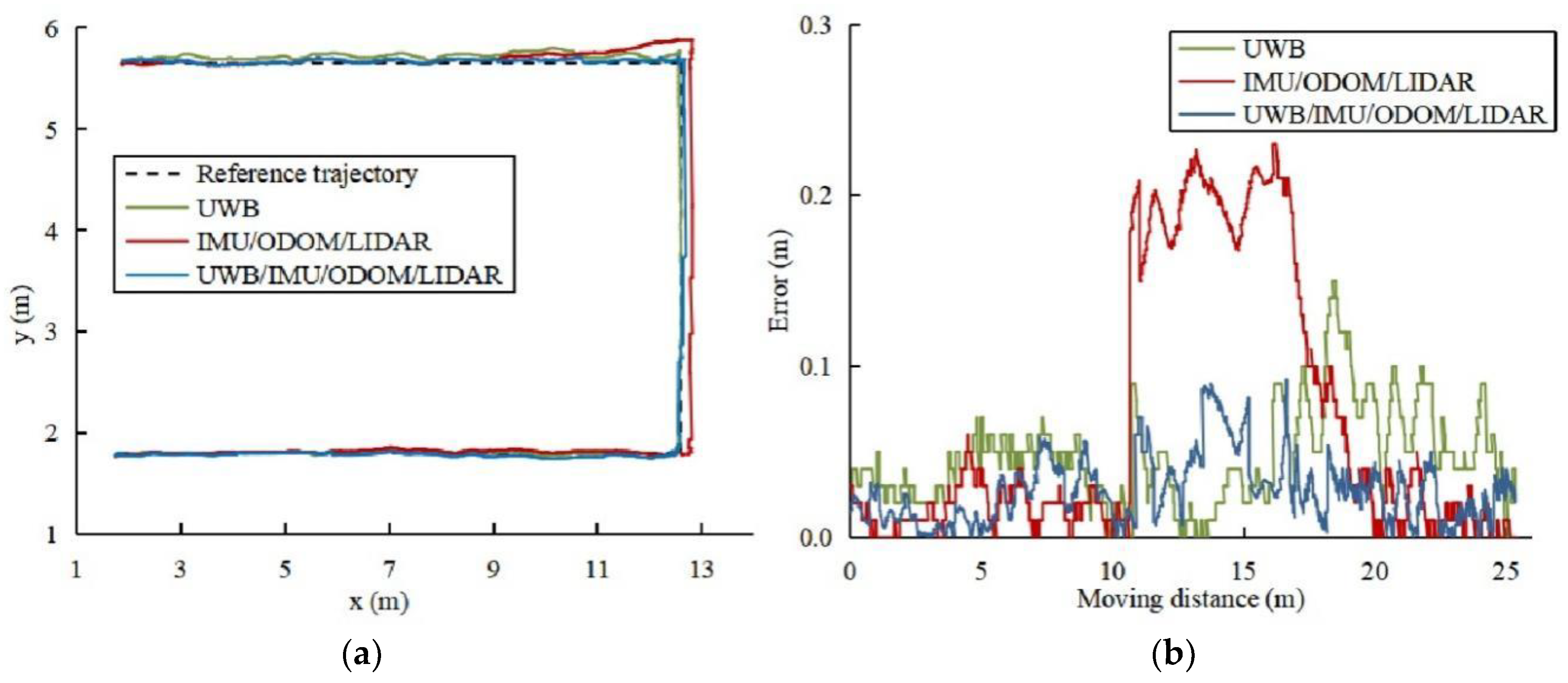
3.1. Precision Comparison Experiment of Greenhouse Mapping and Positioning
3.2. Target Points Positioning Experiment
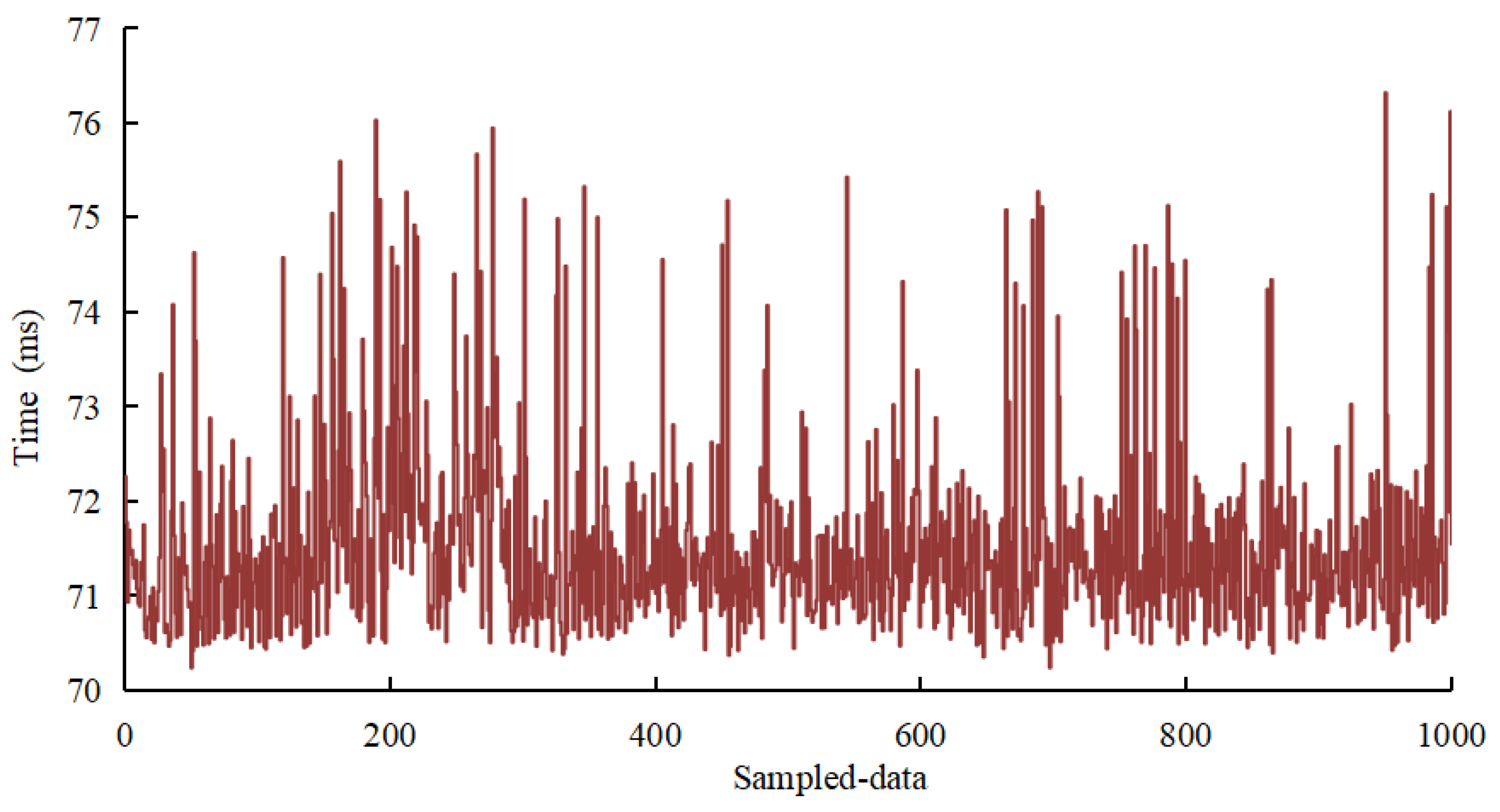
3.3. Analysis of System Positioning Time
4. Conclusions
- UWB/IMU/ODOM/LIDAR-based integrated positioning method is proposed in this study. First, the estimated pose information is obtained by EKF integrating the positioning data of UWB/IMU/ODOM. On this basis, the 2D map of the greenhouse was created by scanning crop-rows with LIDAR. Second, AMCL integrated the LIDAR and map information to achieve global positioning of the greenhouse robot, which was accomplished.
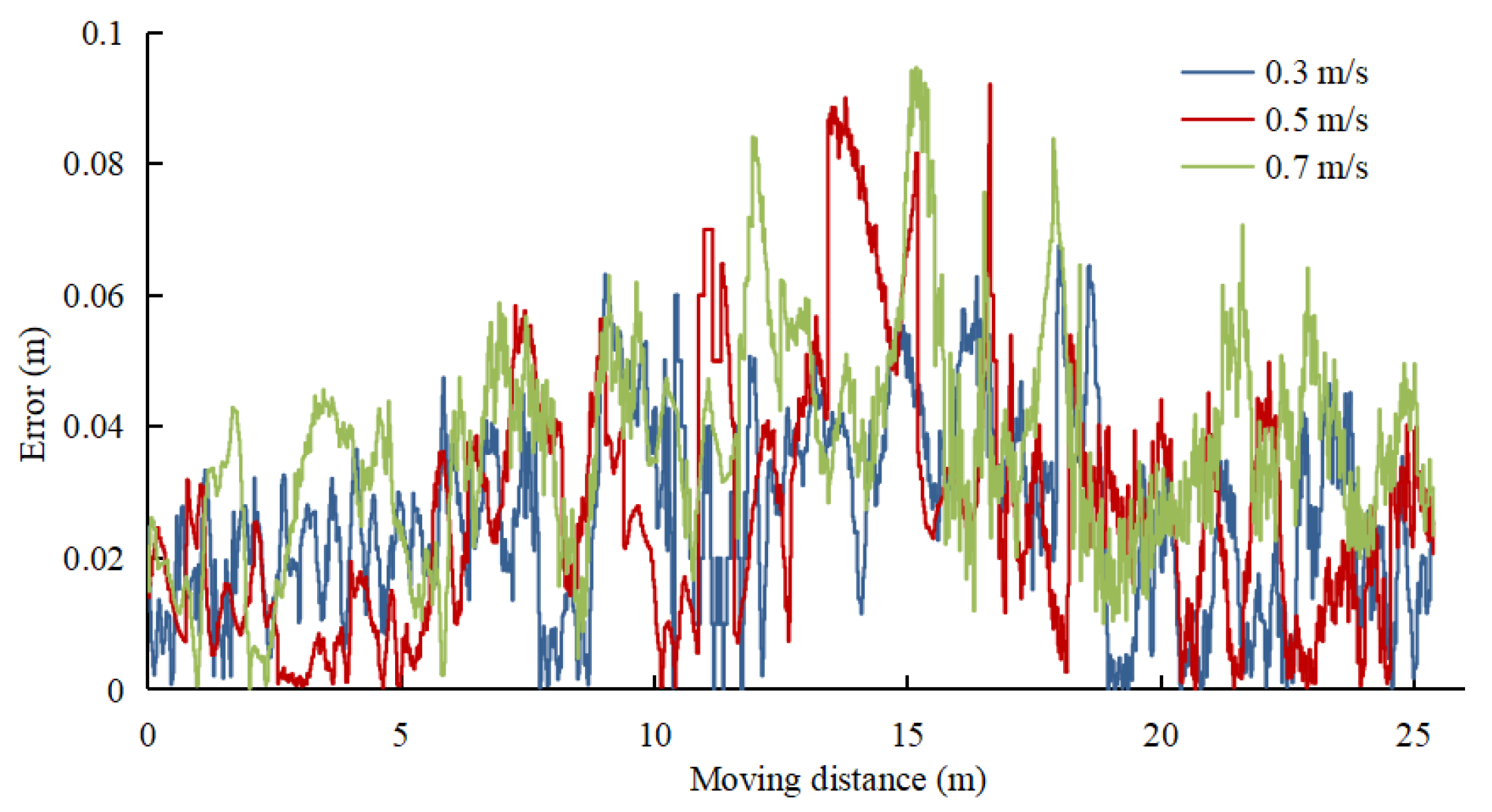
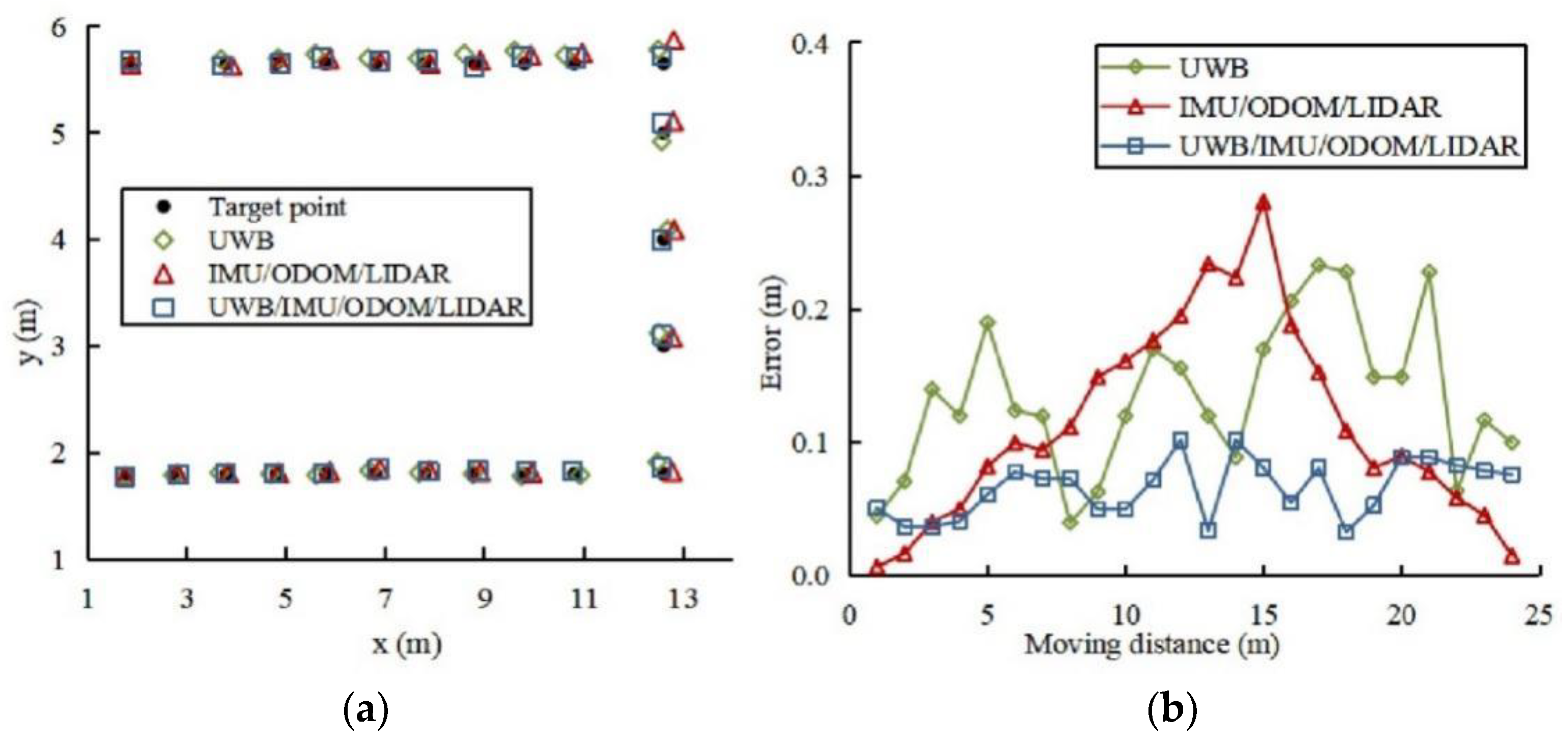
- The precision comparison experiment results of greenhouse mapping and positioning demonstrate that the UWB/IMU/ODOM/LIDAR integrated positioning method in this paper improves the mapping and positioning accuracy compared with the IMU/ODOM/LIDAR integrated positioning method extensively used by conventional indoor mobile robots. At different moving speeds, the lateral error of the positioning method in this paper increases slowly over speed. At 0.7 m/s, the maximum error is 0.095m and the lateral RMSE is 0.04 m. The experimental results of target points positioning indicate that the positioning accuracy of UWB/IMU/ODOM/LIDAR integrated positioning method in this paper increased by 45.5% and 41.5%, respectively, compared with single UWB positioning and IMU/ODOM/LIDAR integrated positioning method. The RMSEs of x-axis direction, y-axis direction, and overall positioning are obtained as 0.092, 0.069, and 0.079 m, respectively, the maximum positioning error is 0.102 m, and the average positioning time of the system is 72.1 ms, thus meeting the positioning accuracy and positioning time requirements of robot navigation in greenhouse operation. Comparing the above test results to the results of existing studies [8,18,36,37], the positioning system proposed in this paper provided a higher level of positioning accuracy.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Jagelčák, J.; Gnap, J.; Kuba, O.; Frnda, J.; Kostrzewski, M. Determination of Turning Radius and Lateral Acceleration of Vehicle by GNSS/INS Sensor. Sensors 2022, 22, 2298. [Google Scholar] [CrossRef] [PubMed]
- Liu, J.Z. Research progress analysis of robotic harvesting technologies in greenhouse. Trans. Chin. Soc. Agric. Mach. 2017, 48, 1–18. [Google Scholar]
- Yasin, J.N.; Mohamed, S.A.S.; Haghbayan, M.H.; Heikkonen, J.; Tenhunen, H.; Plosila, J. Low-cost ultrasonic based object detection and collision avoidance method for autonomous robots. Int. J. Inf. Technol. 2021, 13, 97–107. [Google Scholar] [CrossRef]
- Mahmud, M.S.A.; Abidin, M.S.Z.; Mohamed, Z.; Rahman, M.K.I.A.; Iida, M. Multi-objective path planner for an agricultural mobile robot in a virtual greenhouse environment. Comput. Electron. Agric. 2019, 157, 488–499. [Google Scholar] [CrossRef]
- Subramanian, V.; Thomas, F.B.; Arroyo, A.A. Development of machine vision and laser radar based autonomous vehicle guidance systems for citrus grove navigation. Comput. Electron. Agric. 2006, 53, 130–143. [Google Scholar] [CrossRef]
- Wang, X.; Wu, P.; Feng, Q.; Wang, G. Design and Test of Tomatoes Harvesting Robot. J. Agric. Mech. Res. 2016, 4, 94–98. [Google Scholar]
- Kootstra, G.; Wang, X.; Blok, P.M.; Hemming, J.; Henten, E.V. Selective Harvesting Robotics: Current Research, Trends, and Future Directions. Curr. Robot. Rep. 2021, 2, 95–104. [Google Scholar] [CrossRef]
- Li, T.H.; Wu, Z.H.; Lian, X.K.; Hou, J.L.; Shi, G.Y.; Wang, Q. Navigation line detection for greenhouse carrier vehicle based on fixed direction camera. Trans. Chin. Soc. Agric. Mach. 2018, 49, 8–13. [Google Scholar]
- Mosalanejad, H.; Minaei, S.; Borghei, A.; Farzaneh, B. Evaluation of navigation system of a robot designed for greenhouse spraying. Int. J. Smart Sens. Intell. Syst. 2020, 13, 1–9. [Google Scholar] [CrossRef]
- Guevara, J.; Cheein, F.A.A.; Gené-Mola, J.; Rosell-Polo, J.R.; Lopez, E.G. Analyzing and overcoming the effects of GNSS error on LiDAR based orchard parameters estimation. Comput. Electron. Agric. 2020, 170, 105255. [Google Scholar] [CrossRef]
- Shamsudin, A.U.; Ohno, K.; Hamada, R.; Kojima, S.; Westfechtel, T.; Suzuki, T.; Okada, Y.; Tadokoro, S.; Fujita, J.; Amano, H. Consistent map building in petrochemical complexes for firefighter robots using SLAM based on GPS and LIDAR. Robomech J. 2018, 5, 1–13. [Google Scholar]
- Hou, J.L.; Pu, W.Y.; Li, T.H.; Ding, X.M. Development of dual-lidar navigation system for greenhouse transportation robot. Trans. Chin. Soc. Agric. Eng. 2020, 36, 80–88. [Google Scholar]
- Chen, M. Dynamic Mapping for Domestic Service Robot. Doctoral Thesis, University of Science and Technology of China, Hefei, China, 2019. [Google Scholar]
- Tee, Y.K.; Han, Y.C. Lidar-Based 2D SLAM for Mobile Robot in an Indoor Environment: A Review. In Proceedings of the 2021 International Conference on Green Energy, Computing and Sustainable Technology (GECOST), Miri, Malaysia, 7–9 July 2021; pp. 1–7. [Google Scholar]
- Yu, S.; Yan, F.; Zhuang, Y.; Gu, D.B. A deep-learning-based strategy for kidnapped robot problem in similar indoor environment. J. Intell. Robot. Syst. 2020, 3, 765–775. [Google Scholar] [CrossRef]
- Barral, V.; Suárez-Casal, P.; Escudero, C.J.; García-Naya, J.A. Multi-sensor accurate forklift location and tracking simulation in industrial indoor environments. Electron 2019, 8, 1152. [Google Scholar] [CrossRef] [Green Version]
- Shen, B.Q.; Zhang, Z.M.; Shu, S.L. UWB-VIO integrated indoor location algorithm for mobile robots. J. Comput. Appl. 2022, 42, 1–8. [Google Scholar]
- Lin, X.Z.; Wang, X.; Lin, C.X.; Geng, J.; Xue, J.L.; Zheng, E.L. Location information collection and optimization for agricultural vehicle based on UWB. Trans. Chin. Soc. Agric. Mach. 2018, 49, 23–29. [Google Scholar]
- Reis, W.P.N.; Silva, G.J.; Junior, O.M.; Vivaldini, K.C.T. An extended analysis on tuning the parameters of Adaptive Monte Carlo Localization ROS package in an automated guided vehicle. Int. J. Adv. Manuf. Tech. 2021, 117, 1975–1995. [Google Scholar] [CrossRef]
- Liu, R.; He, Y.; Yuen, C.; Lau, B.P.L.; Ali, R.; Fu, W.P.; Cao, Z.Q. Cost-effective mapping of mobile robot based on the fusion of UWB and short-range 2-D LIDAR. IEEE/ASME Trans. Mechatron. 2021, 27, 3087957. [Google Scholar] [CrossRef]
- Wang, S.; Kobayashi, Y.; Ravankar, A.A.; Ravankar, A.; Emaru, T. A Novel Approach for Lidar-Based Robot Localization in a Scale-Drifted Map Constructed Using Monocular SLAM. Sensors 2019, 19, 2230. [Google Scholar] [CrossRef] [Green Version]
- Yufan, C.; Zijie, N. Simulation and Implementation of Slam Drawing Based on Ros Wheeled Mobile Robot. J. Phys. Conf. Ser. 2021, 1865, 042068. [Google Scholar]
- Kumar, P.S.; Dutt, V.B.S.S.I.; Ganesh, L. Performance evaluation of suitable navigation algorithm using raw measurements taken from stationary GPS receiver. Mater. Today Proc. 2020, 33, 3366–3371. [Google Scholar] [CrossRef]
- Liu, Y.X. Mobile Robot Localization Algorithm Based on Multi-sensor Fusion and Point Cloud Matching. Master’s Thesis, University of Electronic Science and Technology of China, Chengdu, China, 2020. [Google Scholar]
- Zhao, L. Mobile Robot Localization Methods Based on Multi-Source Information Fusion. Master’s Thesis, Harbin Institute of Technology, Harbin, China, 2020. [Google Scholar]
- Zhang, S.L. Research on Localization and Navigation of Indoor Mobile Robot Based on Multi-sensor Fusion. Master’s Thesis, University of Chinese Academy of Sciences(Changchun Institute of Optics, Fine Mechanicsand Physics, Chinese Academy of Sciences), Changchun, China, 2021. [Google Scholar]
- Feng, J.M. Research on Mobile Robot Localization Algorithm Based on Multi-sensor Fusion and Scanning Matching. Master’s Thesis, Northwest Normal University, Lanzhou, China, 2021. [Google Scholar]
- Li, Z.Q.; Chen, L.Q.; Zheng, Q.; Dou, X.Y.; Yang, L. Control of a path following caterpillar robot based on a sliding mode variable structure algorithm. Biosyst. Eng. 2019, 186, 293–306. [Google Scholar] [CrossRef]
- Zhang, H.; Chen, N.; Fan, G. Intelligent robot positioning algorithm based on particle filter. Comput. Appl. Softw. 2020, 37, 134–140. [Google Scholar]
- Kayhani, N.; Zhao, W.D.; McCabe, B.; Schoellig, A.P. Tag-based visual-inertial localization of unmanned aerial vehicles in indoor construction environments using an on-manifold extended Kalman filter. Autom. Constr. 2022, 135, 104112. [Google Scholar] [CrossRef]
- Qian, J.; Zi, B.; Wang, D.; Ma, Y.G.; Zhang, D. The design and development of an omni-directional mobile robot oriented to an intelligent manufacturing system. Sensors 2017, 17, 2073. [Google Scholar] [CrossRef] [Green Version]
- Li, C.Y.; Peng, C.; Zhang, Z.Q.; Miao, Y.L.; Zhang, M.; Li, H. Positioning and map construction for agricultural robots integrating ODOM information. Trans. Chin. Soc. Agric. Eng. 2021, 37, 16–23. [Google Scholar]
- Ponnambalam, V.R.; Bakken, M.; Moore, R.J.D.; Glenn, O.G.J.; Johan, F.P. Autonomous crop row guidance using adaptive multi-roi in strawberry fields. Sensors 2020, 20, 5249. [Google Scholar] [CrossRef] [PubMed]
- Jia, H. Design of SLAM and Navigation Robot Based on Cartographer Algorithm. Master’s Thesis, Shandong University, Jinan, China, 2019. [Google Scholar]
- Gai, R. Research on Robot Positioning Technology Based on Multi-sensor Information Fusion. Master’s Thesis, Beijing University of Civil Engineering and Architecture, Beijing, China, 2019. [Google Scholar]
- Huang, Z.C.; Jacky, T.L.; Zhao, X.; Fukuda, H.; Shiigi, S.; Nakanishi, H.; Suzuki, T.; Ogawa, Y.; Kondo, N. Position and orientation measurement system using spread spectrum sound for greenhouse robots. Biosyst. Eng. 2020, 198, 50–62. [Google Scholar] [CrossRef]
- Xu, Y.; Shmaliy, Y.S.; Ma, W.; Jiang, X.W.; Shen, T.; Bi, S.H.; Guo, H. Improving tightly LiDAR/compass/encoder-integrated mobile robot localization with uncertain sampling period utilizing EFIR filter. Mob. Netw. Appl. 2021, 26, 440–448. [Google Scholar] [CrossRef]
- Bukhori, I.; Ismail, Z.H. Detection of kidnapped robot problem in Monte Carlo localization based on the natural displacement of the robot. Int. J. Adv. Robot. Syst. 2017, 14. [Google Scholar] [CrossRef] [Green Version]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Feature Area | Actual Measured Value (m) | Map Measured Value (m) | |
|---|---|---|---|
| IMU/ODOM/LIDAR | UWB/IMU/ODOM/LIDAR | ||
| 1 | 8.40 | 8.46 | 8.43 |
| 2 | 1.90 | 1.96 | 1.89 |
| 3 | 1.90 | 1.89 | 1.88 |
| 4 | 1.90 | 1.79 | 1.90 |
| 5 | 1.90 | 1.85 | 1.88 |
| Positioning Method | Average Error (m) | Maximum Error (m) | RMSE (m) |
|---|---|---|---|
| UWB | 0.047 | 0.157 | 0.051 |
| IMU/ODOM/LIDAR | 0.067 | 0.234 | 0.103 |
| UWB/IMU/ODOM/LIDAR | 0.027 | 0.091 | 0.034 |
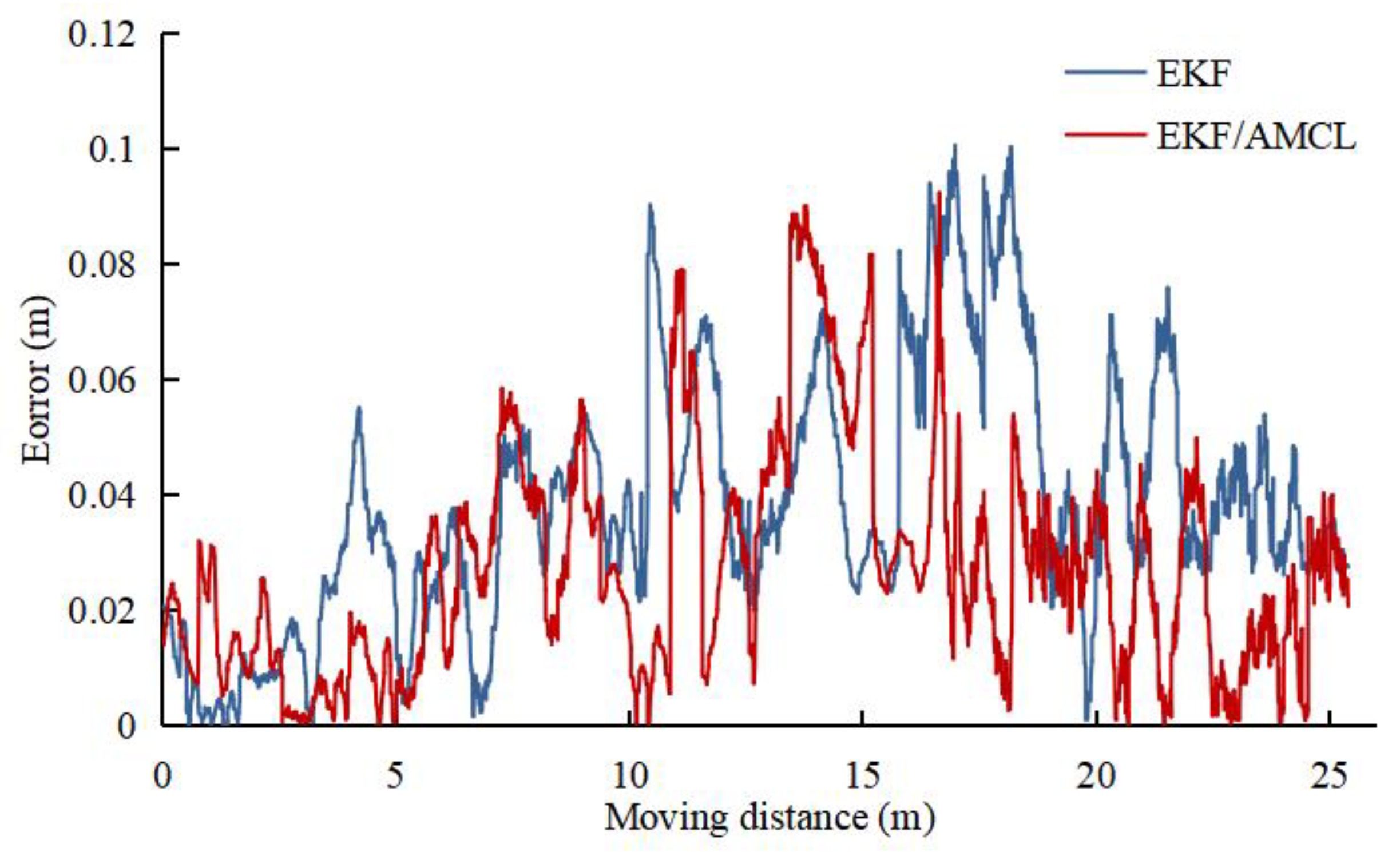
| Integrated Algorithm | Average Error (m) | Maximum Error (m) | RMSE (m) |
|---|---|---|---|
| EKF | 0.039 | 0.101 | 0.044 |
| EKF/AMCL | 0.027 | 0.091 | 0.034 |
| Moving Speed | Average Error (m) | Maximum Error (m) | RMSE (m) |
|---|---|---|---|
| 0.3 m/s | 0.021 | 0.067 | 0.03 |
| 0.5 m/s | 0.027 | 0.091 | 0.034 |
| 0.7 m/s | 0.036 | 0.095 | 0.04 |
| Positioning Method | RMSE (m) | Overall Maximum Error (m) | ||
|---|---|---|---|---|
| x-Axis Direction | y-Axis Direction | Overall | ||
| UWB | 0.140 | 0.083 | 0.145 | 0.233 |
| IMU/ODOM/LIDAR | 0.127 | 0.072 | 0.135 | 0.281 |
| UWB/IMU/ODOM/LIDAR | 0.092 | 0.069 | 0.079 | 0.102 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Long, Z.; Xiang, Y.; Lei, X.; Li, Y.; Hu, Z.; Dai, X. Integrated Indoor Positioning System of Greenhouse Robot Based on UWB/IMU/ODOM/LIDAR. Sensors 2022, 22, 4819. https://doi.org/10.3390/s22134819
Long Z, Xiang Y, Lei X, Li Y, Hu Z, Dai X. Integrated Indoor Positioning System of Greenhouse Robot Based on UWB/IMU/ODOM/LIDAR. Sensors. 2022; 22(13):4819. https://doi.org/10.3390/s22134819
Chicago/Turabian StyleLong, Zhenhuan, Yang Xiang, Xiangming Lei, Yajun Li, Zhengfang Hu, and Xiufeng Dai. 2022. "Integrated Indoor Positioning System of Greenhouse Robot Based on UWB/IMU/ODOM/LIDAR" Sensors 22, no. 13: 4819. https://doi.org/10.3390/s22134819
APA StyleLong, Z., Xiang, Y., Lei, X., Li, Y., Hu, Z., & Dai, X. (2022). Integrated Indoor Positioning System of Greenhouse Robot Based on UWB/IMU/ODOM/LIDAR. Sensors, 22(13), 4819. https://doi.org/10.3390/s22134819