
The DOA Estimation Method for Low-Altitude Targets under the Background of Impulse Noise


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- Compared with the algorithm based on fractional low-order moments, the algorithm in this paper does not require prior knowledge of the characteristic exponent of stable distribution, and it is more adaptable to the environment;
- Compared with the conventional low-altitude target DOA estimation method that only deals with rank deficiencies, the proposed algorithm has better performance in low-altitude environment.
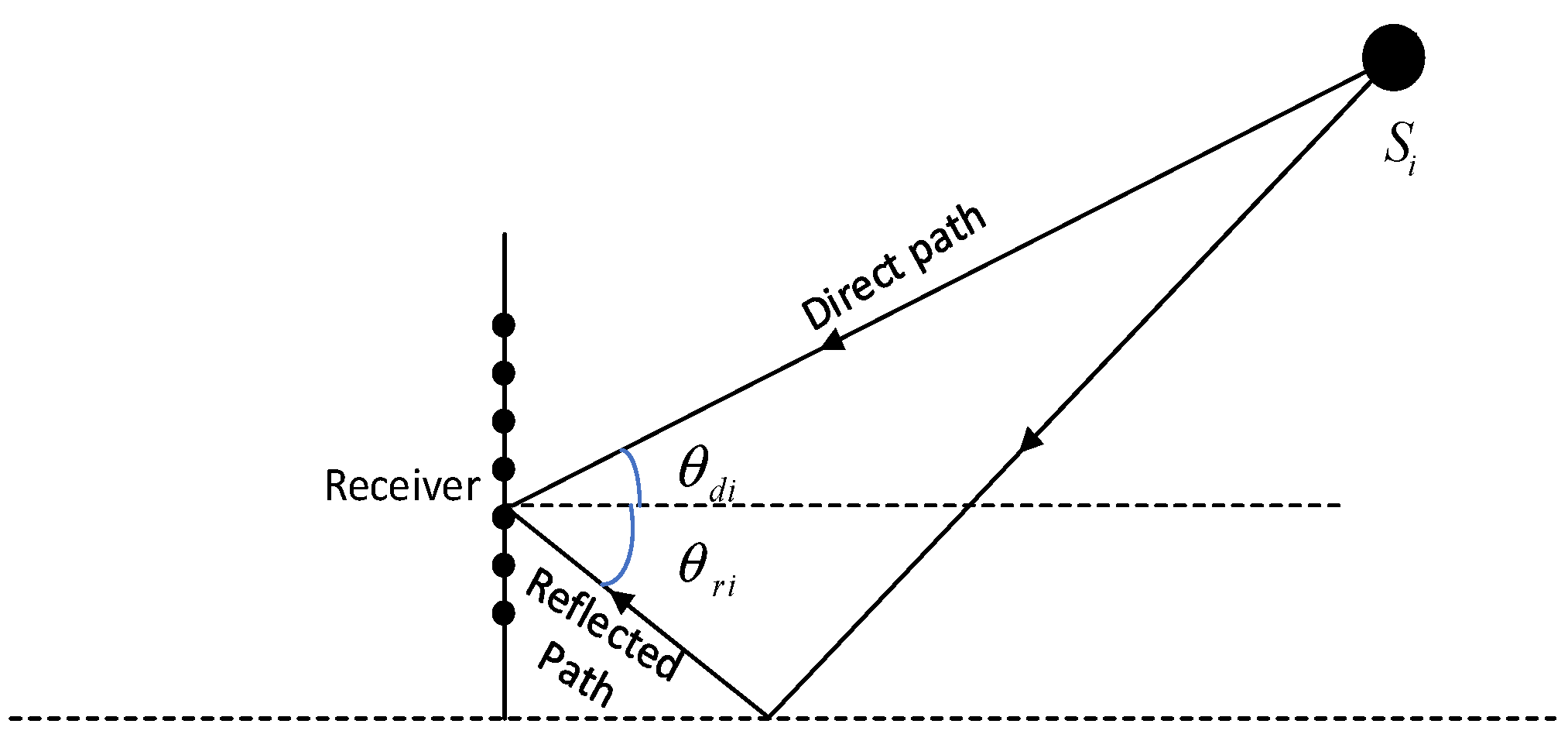
2. Signal Model in Low-Altitude Multipath Environment
3. DOA Estimation of Low-Altitude Targets under Impulse Noise
3.1. Decoherence with Spatial Difference Algorithm
3.2. Modified Projective Subspace Algorithm
4. Basic Steps of the Algorithm and Complexity Analysis
4.1. The Basic Steps of the Algorithm
- Calculate the data covariance matrix of the array element output vector ;
- As shown in Equations (6)–(9), spatial difference operation is performed to obtain ;
- Eigenvalue decomposition of is performed to get ;
- Calculate the modified projection matrix and with Equations (21) and (22);
- As shown in Equations (23)–(26), the cross-covariance matrices of and are constructed to correct the estimated value of ;
- As shown in Equation (27), the optimal correction coefficient is obtained using the maximum likelihood criterion, and the estimated value of is re-adjusted;
- Finally, DOA estimation is performed for the adjusted using MUSIC algorithm.
4.2. Algorithm Complexity Analysis
5. Simulation Results and Analysis
5.1. Impulse Noise Model
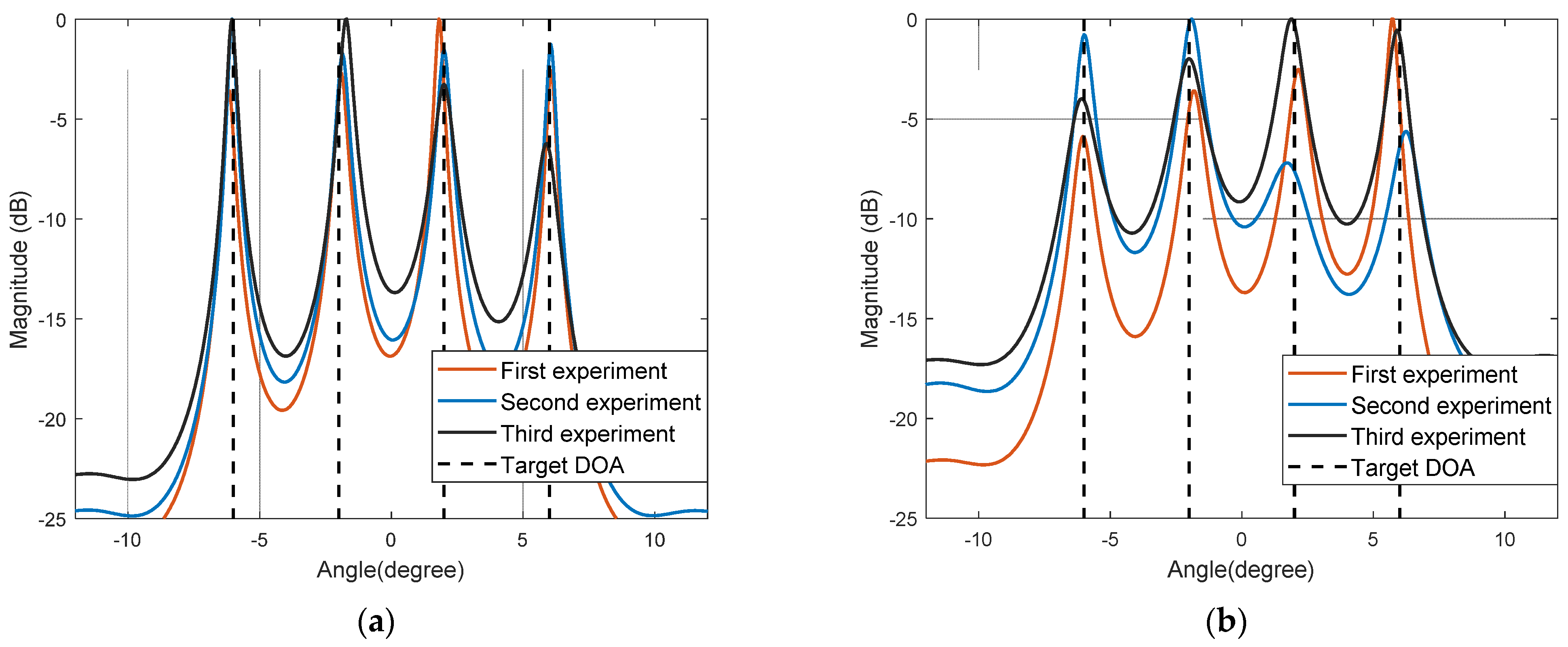
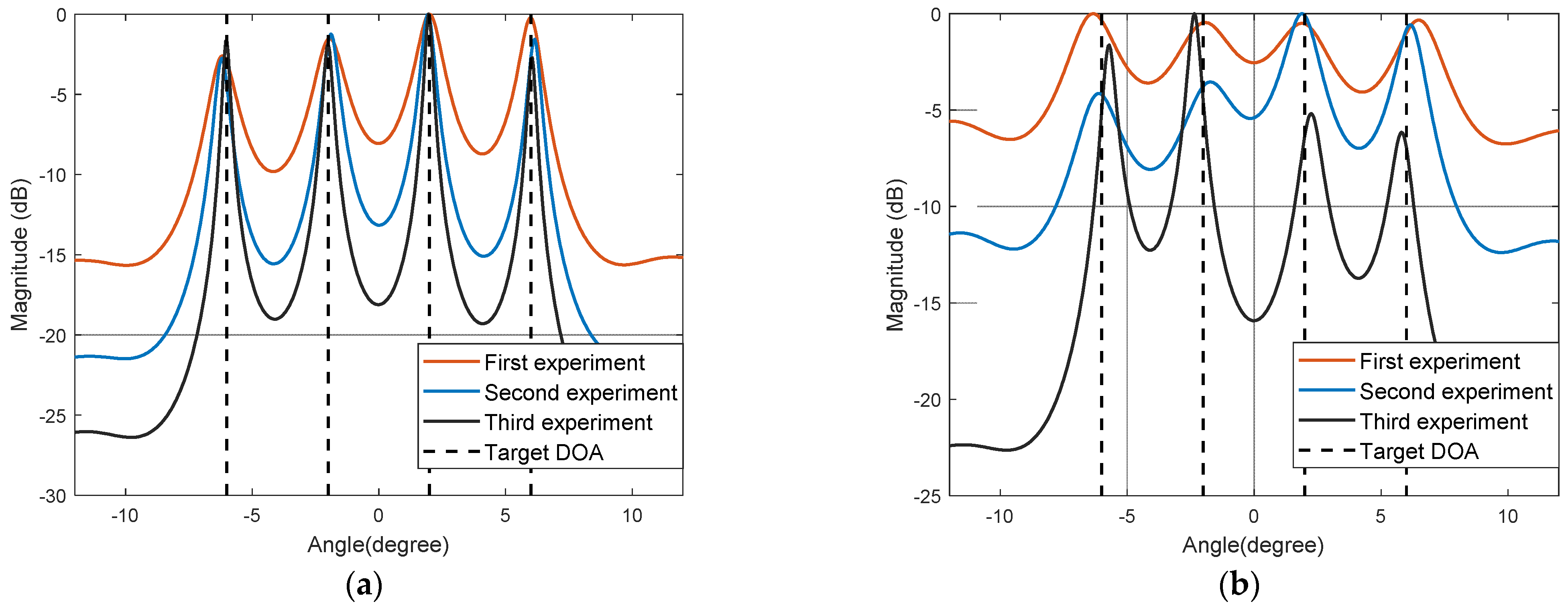
5.2. Spatial Spectrum Estimation
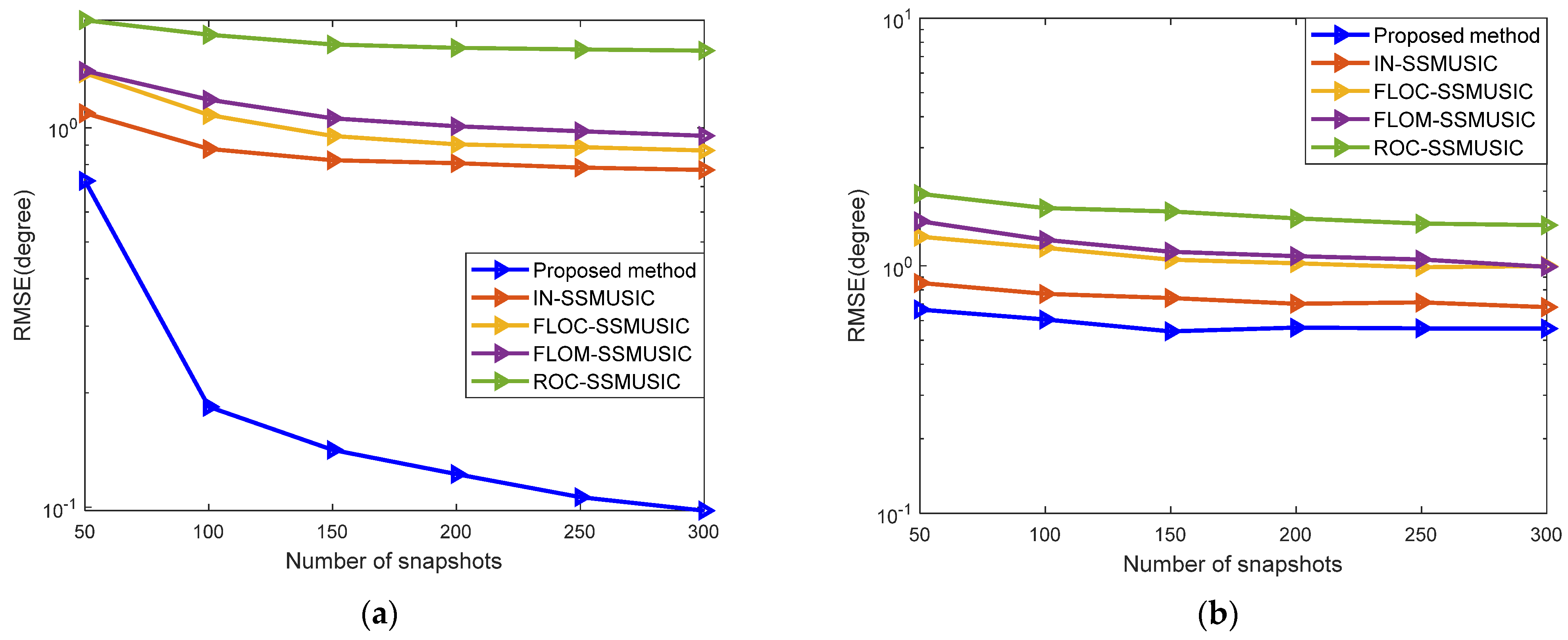
5.3. Comparative Analysis of DOA Estimation Performance
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Schmidt, R.; Schmidt, R.O. Multiple Emitter Location and Signal Parameter Estimation. IEEE Trans. Antennas Propag. 1986, 34, 276–280. [Google Scholar] [CrossRef] [Green Version]
- Sun, K.; Liu, Y.; Meng, H.; Wang, X. Adaptive Sparse Representation for Source Localization with Gain/Phase Errors. Sensors 2011, 11, 4780–4793. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Muhammad, M.; Li, M.; Abbasi, Q.; Goh, C.; Imran, M.A. A Covariance Matrix Reconstruction Approach for Single Snapshot Direction of Arrival Estimation. Sensors 2022, 22, 3096. [Google Scholar] [CrossRef] [PubMed]
- Zheng, G.; Song, Y. Signal Model and Method for Joint Angle and Range Estimation of Low-Elevation Target in Meter-Wave FDA-MIMO Radar. IEEE Commun. Lett. 2022, 26, 449–453. [Google Scholar] [CrossRef]
- Yao, Y.; Lei, H.; He, W. A-CRNN-Based Method for Coherent DOA Estimation with Unknown Source Number. Sensors 2020, 20, 2296. [Google Scholar] [CrossRef] [Green Version]
- Nicola, M.; Falco, G.; Morales Ferre, R.; Lohan, E.-S.; de la Fuente, A.; Falletti, E. Collaborative Solutions for Interference Management in GNSS-Based Aircraft Navigation. Sensors 2020, 20, 4085. [Google Scholar] [CrossRef]
- Zheng, G.; Song, Y.; Chen, C. Height Measurement with Meter Wave Polarimetric MIMO Radar: Signal Model And MUSIC-like Algorithm. Signal Process. 2021, 190, 1872–7557. [Google Scholar] [CrossRef]
- Tan, J.; Nie, Z. Polarization Smoothing Generalized MUSIC Algorithm with Polarization Sensitive Array for Low Angle Estimation. Sensors 2018, 18, 1534. [Google Scholar] [CrossRef] [Green Version]
- Liu, Q.; Gu, Y.; So, H. DOA Estimation in Impulsive Noise Via Low-Rank matrix Approximation and Weakly Convex OptimiZation. IEEE Trans. Aerosp. Electron. Syst. 2019, 55, 3603–3616. [Google Scholar] [CrossRef]
- Wu, S.Y.; Zhao, J.; Dong, X.D.; Xue, Q.T.; Cai, R.H. DOA Tracking Based on Unscented Transform Multi-Bernoulli Filter in Impulse Noise Environment. Sensors 2019, 19, 4031. [Google Scholar] [CrossRef] [Green Version]
- Li, J. Improved Angular Resolution for Spatial Smoothing Techniques. Signal Process. 1992, 40, 3078–3081. [Google Scholar] [CrossRef]
- Ma, X.; Dong, X.; Xie, Y. An Improved Spatial Differencing Method for DOA Estimation with The Coexistence of Uncorrelated and Coherent Signals. IEEE Sens. J. 2016, 16, 3719–3723. [Google Scholar] [CrossRef]
- Liu, F.; Wang, J.; Sun, C. Spatial Differencing Method for DOA Estimation under The Coexistence of Both Uncorrelated and Coherent Signals. IEEE Trans. Antennas Propag. 2012, 60, 2052–2062. [Google Scholar] [CrossRef]
- Al-Ardi, E.M.; Shubair, R.M.; Al-Mualla, M.E. Computationally Efficient High-Resolution DOA Estimation in Multipath Environment. Electron. Lett. 2014, 40, 908–910. [Google Scholar] [CrossRef]
- Zeng, X.L.; Lei, M. Estimation of Direction of Arrival by Time Reversal for Low-Angle Targets. IEEE Trans. Aerosp. Electron. Syst. 2018, 54, 2675–2694. [Google Scholar] [CrossRef]
- Xu, H.; Cui, W.; Du, Y. The Analysis of Using Spatial Smoothing for DOA Estimation of Coherent Signals in Sparse Arrays. Int. J. Antennas Propag. 2021, 2021, 4447562. [Google Scholar] [CrossRef]
- Qi, B.; Liu, D. An Enhanced Spatial Smoothing Algorithm for Coherent Signals DOA Estimation. Eng. Comput. 2021, 39, 574–586. [Google Scholar] [CrossRef]
- Chen, Z.; Ding, Y.; Ren, S.; Chen, Z. A Novel Noncircular MUSIC Algorithm Based on the Concept of the Difference and Sum Coarray. Sensors 2018, 18, 344. [Google Scholar] [CrossRef] [Green Version]
- Meng, F.X.; Yu, X.T.; Zhang, Z.C. Quantum Algorithm for Multiple Signal Classification. Phys. Rev. A 2021, 101, 23–34. [Google Scholar] [CrossRef]
- Nikias, C.L.; Shao, M. Signal Processing with Alpha-Stable Distributions and Applications. Comput. Stat. Data Anal. 1996, 22, 20–55. [Google Scholar]
- Li, L.; Qiu, T.S.; Song, D.R. Parameter Estimation Based on Fractional Power Spectrum under Alpha-Stable Distribution Noise Environment in Wideband Bistatic MIMO Radar System. AEU Int. J. Electron. Commun. 2013, 67, 947–954. [Google Scholar] [CrossRef]
- Mendel, J.M. A Subspace-Based Direction Finding Algorithm Using Fractional Lower Order Statistics. IEEE Trans. Signal Process. 2001, 49, 1605–1613. [Google Scholar]
- Tzagkarakisa, G.; Tsakalidesb, P.; Starcka, J.-L. Covariation-Based Subspace-Augmented MUSIC for Joint Sparse Support Recovery in Impulsive Environments. Signal Process. 2013, 93, 1365–1373. [Google Scholar] [CrossRef]
- Hacioglu, I.; Harmanci, F.K.; Anarim, E. Time-of-Arrival Estimation with FLOM-MUSIC under Impulsive Noise. In Proceedings of the IEEE 14th Signal Processing & Communications Applications, Antalya, Türkiye, 16–19 April 2006. [Google Scholar]
- Diao, M.; Yang, L.L.; Chen, C. DOA Estimation of Spatial-Temporal and Maximum-Likelihood Based on Fractional Lower-Order Statistics. Appl. Sci. Technol. 2010, 37, 15–18. [Google Scholar]
- Li, S.; He, R.; Lin, B. DOA Estimation Based on Sparse Representation of The Fractional Lower Order Statistics in Impulsive Noise. IEEE J. Autom. Sin. 2018, 5, 860–868. [Google Scholar] [CrossRef]
- Wang, H.B.; Long, J.B.; Zhou, Y.X. Frequency Spectrum Estimate Based on Decomposed FLOC Matrix under Stable Distribution Noise. Appl. Mech. Mater. 2014, 556–562, 4563–4567. [Google Scholar] [CrossRef]
- Li, S.; Chen, X.; He, R. Robust Cyclic MUSIC Algorithm for Finding Directions in Impulsive Noise Environment. Int. J. Antennas Propag. 2017, 2017, 9038341. [Google Scholar] [CrossRef] [Green Version]
- Liu, Y.; Wu, Q.; Zhang, Y. Cyclostationarity-Based DOA Estimation Algorithms for Coherent Signals in Impulsive Noise Environments. EURASIP J. Wirel. Commun. Netw. 2019, 2019, 81. [Google Scholar] [CrossRef]
- Wang, J.T.; Sheng, J.; Jin, H.E. Subspace-Based DOA Estimation in Impulsive Noise Environments for MIMO Radars. J. Astronaut. 2009, 53, 89–98. [Google Scholar]
- Gong, J.; Guo, Y. A Bistatic MIMO Radar Angle Estimation Method for Coherent Sources in Impulse Noise Background. Wirel. Pers. Commun. 2020, 116, 3567–3576. [Google Scholar] [CrossRef]
- Yanan, D.U.; Gao, H.; Chen, M. Direction of Arrival Estimation Method Based on Quantum Electromagnetic Field Optimization in The Impulse Noise. Syst. Eng. Electron. Technol. Engl. Ed. 2021, 32, 11. [Google Scholar] [CrossRef]



Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lin, B.; Hu, G.; Zhou, H.; Zheng, G.; Song, Y. The DOA Estimation Method for Low-Altitude Targets under the Background of Impulse Noise. Sensors 2022, 22, 4853. https://doi.org/10.3390/s22134853
Lin B, Hu G, Zhou H, Zheng G, Song Y. The DOA Estimation Method for Low-Altitude Targets under the Background of Impulse Noise. Sensors. 2022; 22(13):4853. https://doi.org/10.3390/s22134853
Chicago/Turabian StyleLin, Bin, Guoping Hu, Hao Zhou, Guimei Zheng, and Yuwei Song. 2022. "The DOA Estimation Method for Low-Altitude Targets under the Background of Impulse Noise" Sensors 22, no. 13: 4853. https://doi.org/10.3390/s22134853