
A Reliable Merging Link Scheme Using Weighted Markov Chain Model in Vehicular Ad Hoc Networks


Abstract
:1. Introduction
- We studied and created a merge cluster head selection (MCHS) algorithm that minimizes the frequencies of merging collision and hidden terminal concerns while also electing the best-fit CH in a merged cluster when two or more clusters merged.
- We used a weighted Markov chain model to describe the transformation operation within a cluster and differentiated it from other clusters based on the weighted value.
- During the clusters merging window, the weighted Markov chain mathematical model improved accuracy while reducing ECMA channel data access transmission delay with unmatched transition speed in a time slot and state slot (frame). During the window time (T), this speeds up transitions while eliminating hidden terminal difficulties and access collision.
- The aperiodic MCH selection is based on the merge window period probability and the development of a centralized cluster in a VANET where all nodes are one-hop nodes.
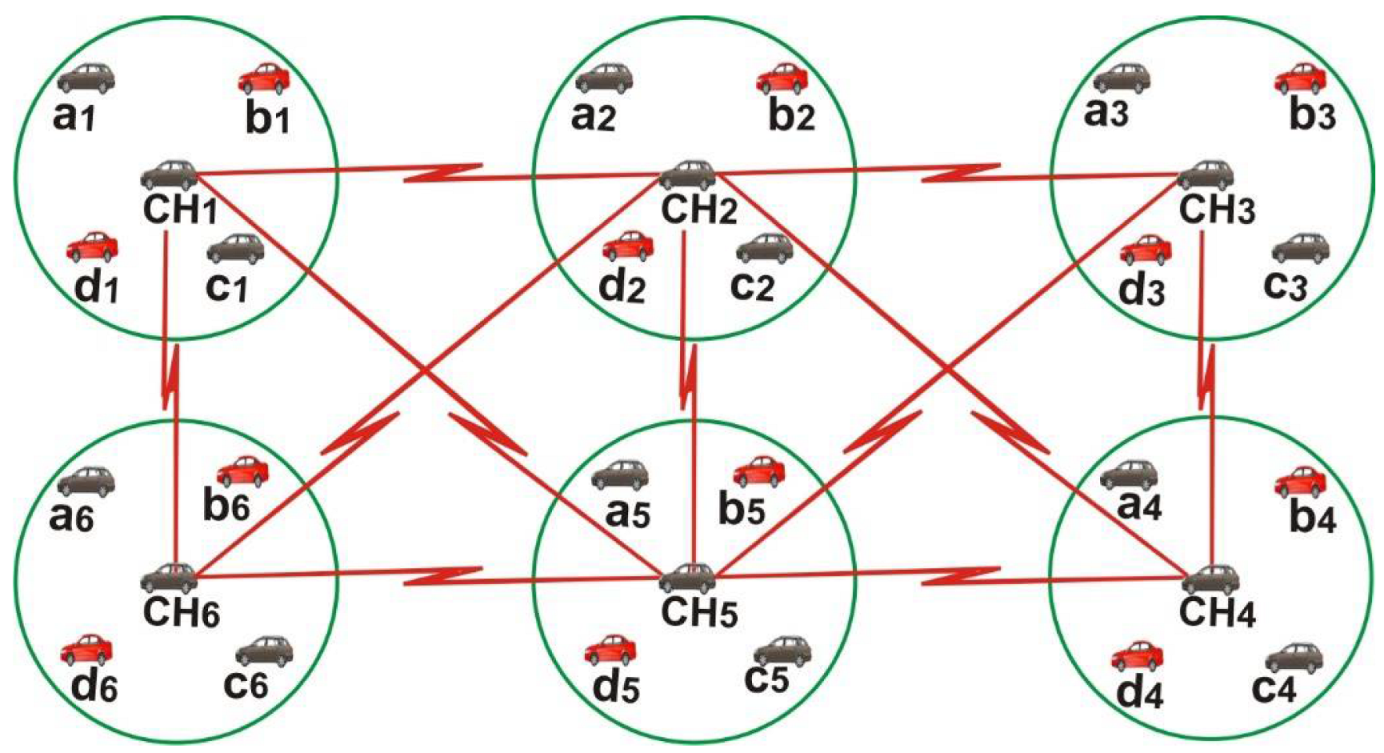
- In a merged cluster, the CHs choose the best candidate as the MCH. Although their cluster members (CMs) inside the transmission range released their time slots and acquired a new time slot from the new MCH, the other CHs became CMs. The CMs that are outside of the new MCH’s transmission range will continue to cling to their previous CH, which has now turned to gateway node (Gw), until all of the remaining CMs are inside the MCH’s transmission range, at which point the Gw will eventually switch to CM.
- For performance evaluation, we built a detailed simulation model and put the suggested technique into action. Extensive simulation results indicated the superiority and scalability of the proposed ECMA method.
2. Existing Works on Merging Collisions
3. Proposed Method
3.1. Weighted Markov Chain
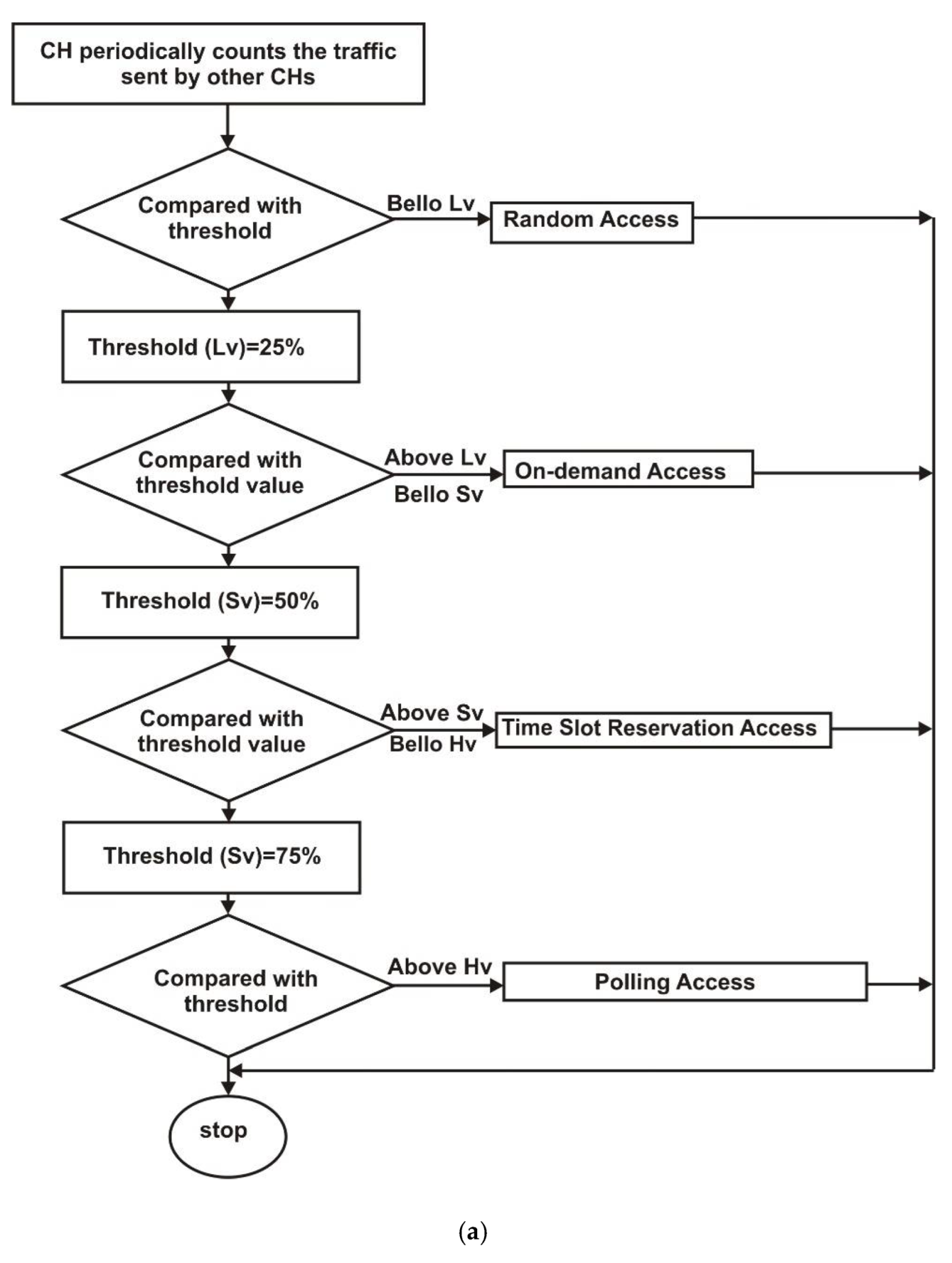
3.2. Periodic Access and CH Connectivity Level
3.3. Merging Channel Access Mechanism
| Algorithms 1: MCH selection in a merged cluster |
 |
4. Performance Evaluation
- i.
- Average network throughput—the average number of data packets successfully transmitted to neighboring CMs within a unit time is known as the average network throughput.
- ii.
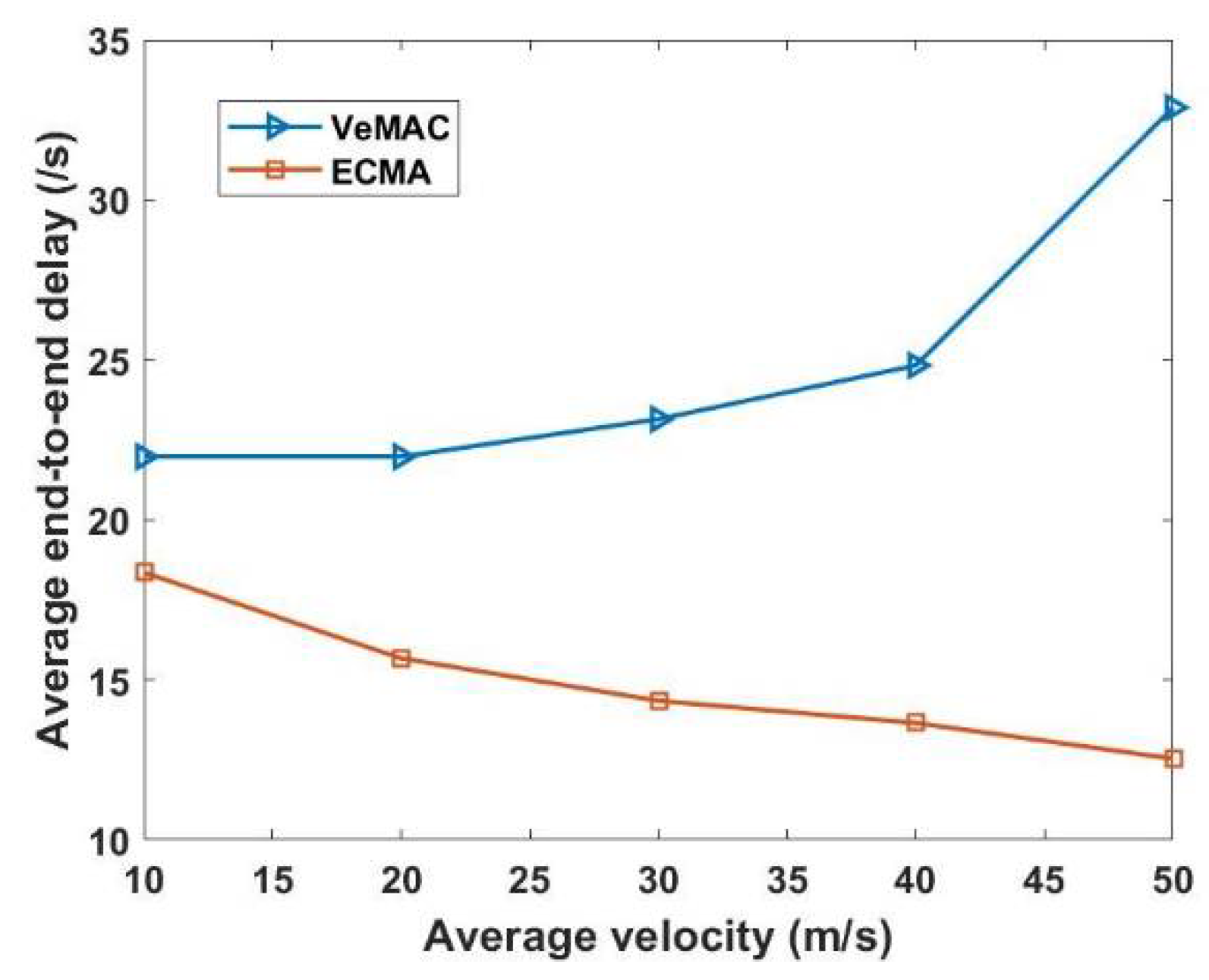
- The end-to-end delay—the time required for a data packet transmitted and successfully received by neighboring nodes.
- iii.
- Successful access transmission probability—defined as the ratio of the number of data packets successfully transmitted in the network to the total number of data packets effectively transmitted.
Simulation and Parameters
5. Discussion
5.1. Access Delay Time-Slot Probability
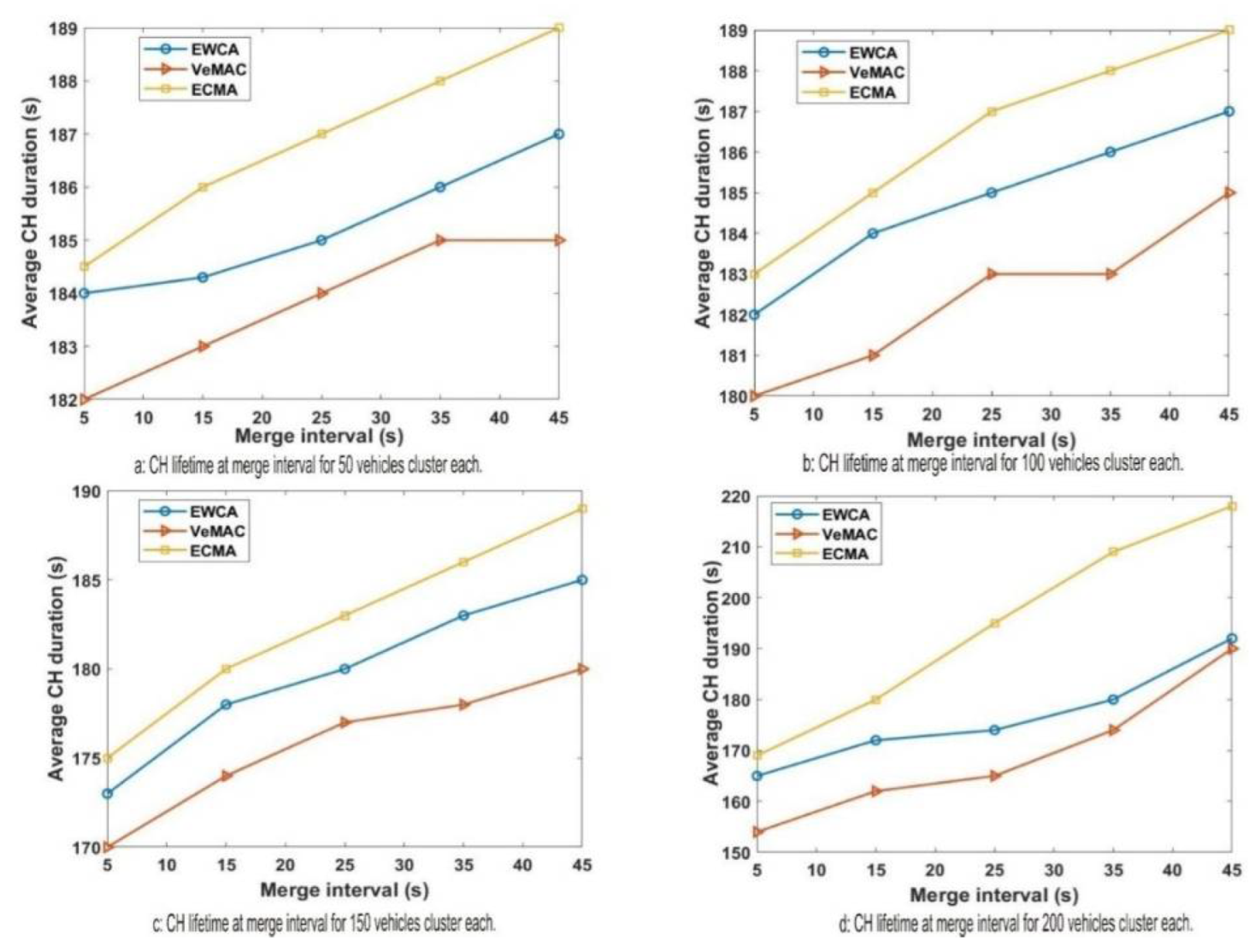
5.2. Cluster Head Lifetime and Its Influence on Merge Window
5.3. Cluster Member Disconnection Frequency and It Influence on Merge Window
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Quy, V.K.; Nam, V.H.; Linh, D.M.; Ban, N.T.; Han, N.D. Communication Solutions for Vehicle Ad-hoc Network in Smart Cities Environment: A Comprehensive Survey. Wirel. Pers. Commun. 2021, 122, 2791–2815. [Google Scholar] [CrossRef]
- Mu, W.; Li, G.; Ma, Y.; Wang, R.; Li, Y.; Li, Z. Beacon-Based Hybrid Routing Protocol for Large-Scale Unmanned Vehicle Ad Hoc Network. Electronics 2021, 10, 3129. [Google Scholar] [CrossRef]
- Aslam, A.; Almeida, L.; Santos, F. Using RA-TDMA to support concurrent collaborative applications in VANETs. In Proceedings of the IEEE EUROCON 2017—17th International Conference on Smart Technologies, Ohrid, Macedonia, 6–8 July 2017; pp. 896–901. [Google Scholar] [CrossRef]
- Daknou, E.; Tabbane, N.; Thaalbi, M. A MAC Multi-channel Scheme Based on Learning-Automata for Clustered VANETs. In Proceedings of the 2018 IEEE 32nd International Conference on Advanced Information Networking and Applications (AINA), Krakow, Poland, 16–18 May 2018; Volume 2018, pp. 71–78. [Google Scholar] [CrossRef]
- Latif, M.B.; Liu, F.; Liu, K. A TDMA-Based MAC Protocol for Mitigating Mobility-Caused Packet Collisions in Vehicular Ad Hoc Networks. Sensors 2022, 22, 643. [Google Scholar] [CrossRef] [PubMed]
- Nguyen, V.; Hong, C.S. Efficient Access Time Slot for MAC Protocol Using TDMA and CSMA in VANET. 2016, pp. 927–929. Available online: http://bss.kyunghee.ac.kr/layouts/net/publications/data/KIISE2016/VanDung%20Nguyen.pdf (accessed on 10 March 2022).
- Bang, J.-H.; Lee, J.-R. Collision Avoidance Method Using Vector-Based Mobility Model in TDMA-Based Vehicular Ad Hoc Networks. Appl. Sci. 2020, 10, 4181. [Google Scholar] [CrossRef]
- Ding, H.; Li, C.; Bao, L.; Yang, Z.; Liu, L.; Liu, Q. Research on Multi-Level Priority Polling MAC Protocol in FPGA Tactical Data Chain. IEEE Access 2019, 7, 33506–33516. [Google Scholar] [CrossRef]
- Rukaiya, R.; Farooq, M.U.; Khan, S.A.; Hussain, F.; Akhunzada, A. CFFD-MAC: A Hybrid MAC for Collision Free Full-Duplex Communication in Wireless Ad-Hoc Networks. IEEE Access 2021, 9, 35584–35598. [Google Scholar] [CrossRef]
- Dissertation, A. Improving the Reliability and Efficiency of Data Transmission in Vehicular Ad-Hoc Network. Ph.D. Thesis, Faculty of the Graduate School, University of Minnesota, Minneapolis, MN, USA, 2015. [Google Scholar]
- Hadded, M.; Muhlethaler, P.; Laouiti, A.; Saidane, L.A. A centralized TDMA based scheduling algorithm for real-time communications in vehicular ad hoc networks. In Proceedings of the 2016 24th International Conference on Software, Telecommunications and Computer Networks (SoftCOM), Split, Croatia, 22–24 September 2016; pp. 1–6. [Google Scholar] [CrossRef] [Green Version]
- Hadded, M.; Muhlethaler, P.; Laouiti, A. TDMA Scheduling Strategies for Vehicular Ad Hoc Networks: From a Distributed to a Centralized Approach. In Proceedings of the 2018 26th International Conference on Software, Telecommunications and Computer Networks (SoftCOM), Split, Croatia, 13–15 September 2018; pp. 164–169. [Google Scholar] [CrossRef] [Green Version]
- Almalag, M.S.; Olariu, S.; Weigle, M.C. TDMA cluster-based MAC for VANETs (TC-MAC). In Proceedings of the 2012 IEEE International Symposium on a World of Wireless, Mobile and Multimedia Networks (WoWMoM), San Francisco, CA, USA, 25–28 June 2012; pp. 1–6. [Google Scholar] [CrossRef]
- Wang, M.; Chen, T.; Du, F.; Wang, J.; Yin, G.; Zhang, Y. Research on adaptive beacon message transmission power in VANETs. J. Ambient. Intell. Humaniz. Comput. 2020, 13, 1307–1319. [Google Scholar] [CrossRef]
- Talib, M.S.; Hassan, A.; Abas, Z.A.; Abdul-hussian, A.; Ali, M.F. Clustering Based Affinity Propagation in VANETs: Taxonomy and Opportunity of Research. Int. J. Recent Technol. Eng. 2019, 7, 672–679. [Google Scholar]
- Ye, M.; Guan, L.; Quddus, M. TDMP: Reliable Target Driven and Mobility Prediction based routing protocol in complex Vehicular Ad-hoc Network. Veh. Commun. 2021, 31, 100361. [Google Scholar] [CrossRef]
- Tambawal, A.B.; Noor, R.; Salleh, R.; Chembe, C.; Oche, M. Enhanced weight-based clustering algorithm to provide reliable delivery for VANET safety applications. PLoS ONE 2019, 14, e0214664. [Google Scholar] [CrossRef]
- Alsuhli, G.H.; Khattab, A.; Fahmy, Y.A. Double-Head Clustering for Resilient VANETs. Wirel. Commun. Mob. Comput. 2019, 2019, 1–17. [Google Scholar] [CrossRef]
- Sheu, T.; Lin, Y. A Cluster-based TDMA System for Inter-Vehicle Communications. J. Inf. Sci. Eng. 2014, 30, 213–231. [Google Scholar]
- Chiluveru, R.; Gupta, N.; Teles, A. Distribution of Safety Messages Using Mobility-Aware Multi-Hop Clustering in Vehicular Ad Hoc Network. Future Internet 2021, 13, 169. [Google Scholar] [CrossRef]
- Wu, J.; Zhang, L.; Liu, Y. On the Design and Implementation of a Real-Time Testbed for Distributed TDMA-Based MAC Protocols in VANETs. IEEE Access 2021, 9, 122092–122106. [Google Scholar] [CrossRef]
- Omar, H.A.; Zhuang, W.; Li, L. VeMAC: A TDMA-Based MAC Protocol for Reliable Broadcast in VANETs. IEEE Trans. Mob. Comput. 2012, 12, 1724–1736. [Google Scholar] [CrossRef] [Green Version]
- Mammu, A.S.K.; Hernandez-Jayo, U.; Sainz, N. Direction aware cluster-based multi channel MAC protocol for vehicular ad hoc networks. In Proceedings of the 2015 IEEE 11th International Conference on Wireless and Mobile Computing, Networking and Communications (WiMob), Abu Dhabi, United Arab Emirates, 19–21 October 2015; pp. 549–556. [Google Scholar] [CrossRef]
- Zeng, L.; Zhang, J.; Han, Q.; Ye, L.; He, Q.; Zhang, X.; Yang, T. A Bus-Oriented Mobile FCNs Infrastructure and Intra-Cluster BSM Transmission Mechanism. IEEE Access 2019, 7, 24308–24320. [Google Scholar] [CrossRef]
- Huang, Z.; Xu, R.; Chu, C.; Wen, G. A Modified RR-ALOHA Protocol for Safety Message Broadcast in VANETs. J. Phys. Conf. Ser. 2020, 1650, 032005. [Google Scholar] [CrossRef]
- Ren, M.; Zhang, J.; Khoukhi, L.; Labiod, H.; Veque, V. A study of the impact of merging schemes on cluster stability in VANETs. In Proceedings of the 2017 IEEE 28th Annual International Symposium on Personal, Indoor, and Mobile Radio Communications (PIMRC), Montreal, QC, Canada, 8–13 October 2017; Volume 2017, pp. 1–7. [Google Scholar] [CrossRef]
- Zhang, Y.; Liu, K.; Liu, S.; Zhang, J.; Zhang, T.; Xu, Z.; Liu, F. A Clustering-Based Collision-Free Multichannel MAC Protocol for Vehicular Ad Hoc Networks. In Proceedings of the 2018 IEEE 88th Vehicular Technology Conference (VTC-Fall), Chicago, IL, USA, 27–30 August 2018; pp. 1–7. [Google Scholar] [CrossRef]
- Lyu, F.; Zhu, H.; Zhou, H.; Qian, L.; Xu, W.; Li, M.; Shen, X. MoMAC: Mobility-Aware and Collision-Avoidance MAC for Safety Applications in VANETs. IEEE Trans. Veh. Technol. 2018, 67, 10590–10602. [Google Scholar] [CrossRef]
- Jiang, X.; Du, D.H.C. PTMAC: A Prediction-Based TDMA MAC Protocol for Reducing Packet Collisions in VANET. IEEE Trans. Veh. Technol. 2016, 65, 9209–9223. [Google Scholar] [CrossRef]
- Shafiq, Z.; Abbas, R.; Zafar, M.H.; Basheri, M. Analysis and Evaluation of Random Access Transmission for UAV-Assisted Vehicular-to-Infrastructure Communications. IEEE Access 2019, 7, 12427–12440. [Google Scholar] [CrossRef]
- Hu, J.; Lyu, W.; Zhong, S.; Huang, J. Motion Prediction Based TDMA Protocol in VANETs. Electronics 2020, 9, 1792. [Google Scholar] [CrossRef]
- Xie, J.; Li, C. Weight Clustering Based TDMA-MAC Scheme in VANET. Automatika 2016, 57, 252–260. [Google Scholar] [CrossRef] [Green Version]
- Lin, Z.; Sun, Y.; Tang, Y.; Liu, Z. An efficient message broadcasting MAC protocol for VANETs. Wirel. Netw. 2020, 26, 6043–6057. [Google Scholar] [CrossRef]
- Boucetta, S.I.; Johanyák, Z.C. Optimized Ad-hoc Multi-hop Broadcast Protocol for Emergency Message Dissemination in Vehicular Ad-hoc Networks. Acta Polytech. Hung. 2022, 19, 23–42. [Google Scholar] [CrossRef]
- Song, C.; Tan, G.; Yu, C. An Efficient and QoS Supported Multichannel MAC Protocol for Vehicular Ad Hoc Networks. Sensors 2017, 17, 2293. [Google Scholar] [CrossRef] [Green Version]
- Yao, Y.; Zhang, K.; Zhou, X. A Flexible Multi-Channel Coordination MAC Protocol for Vehicular Ad Hoc Networks. IEEE Commun. Lett. 2017, 21, 1305–1308. [Google Scholar] [CrossRef]
- Nguyen, V.; Kim, O.T.T.; Pham, C.; Oo, T.Z.; Tran, N.H.; Hong, C.S.; Huh, E.-N. A Survey on Adaptive Multi-Channel MAC Protocols in VANETs Using Markov Models. IEEE Access 2018, 6, 16493–16514. [Google Scholar] [CrossRef]
- Peng, Z.; Bao, C.; Zhao, Y.; Yi, H.; Xia, L.; Yu, H.; Shen, H.; Chen, F. Weighted Markov chains for forecasting and analysis in Incidence of infectious diseases in jiangsu Province, China. J. Biomed. Res. 2010, 24, 207–214. [Google Scholar] [CrossRef] [Green Version]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
| DSRC channel frequency | 5.9 GHz | DSRC channel bandwidth | 10 MHz |
| MAC/PHY | WAVE/IEEE 802.11p | Mean deviation | 0-Vmax |
| Simulation time | 1000 s | Vehicle densities | 50, 100, 150, 200 |
| Merge window (Mw) | 5, 15, 25, 35, 45 | Weight factor level | 0.47, 0.24, 0.24, 0.05 |
| Radios r | 500 m | Region’s size | 1000 × 1000 |
| Data rate | 100 Mbps | Packet arriving rate | 25 Packets/s |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Emmanuel, S.; Isnin, I.F.B.; Mohamad, M.M.B. A Reliable Merging Link Scheme Using Weighted Markov Chain Model in Vehicular Ad Hoc Networks. Sensors 2022, 22, 4861. https://doi.org/10.3390/s22134861
Emmanuel S, Isnin IFB, Mohamad MMB. A Reliable Merging Link Scheme Using Weighted Markov Chain Model in Vehicular Ad Hoc Networks. Sensors. 2022; 22(13):4861. https://doi.org/10.3390/s22134861
Chicago/Turabian StyleEmmanuel, Siman, Ismail Fauzi Bin Isnin, and Mohd. Murtadha Bin Mohamad. 2022. "A Reliable Merging Link Scheme Using Weighted Markov Chain Model in Vehicular Ad Hoc Networks" Sensors 22, no. 13: 4861. https://doi.org/10.3390/s22134861
APA StyleEmmanuel, S., Isnin, I. F. B., & Mohamad, M. M. B. (2022). A Reliable Merging Link Scheme Using Weighted Markov Chain Model in Vehicular Ad Hoc Networks. Sensors, 22(13), 4861. https://doi.org/10.3390/s22134861