
Biomechanics of the Upper Limbs: A Review in the Sports Combat Ambit Highlighting Wearable Sensors

 ,
,  ,
,  ,
,
Abstract
1. Introduction
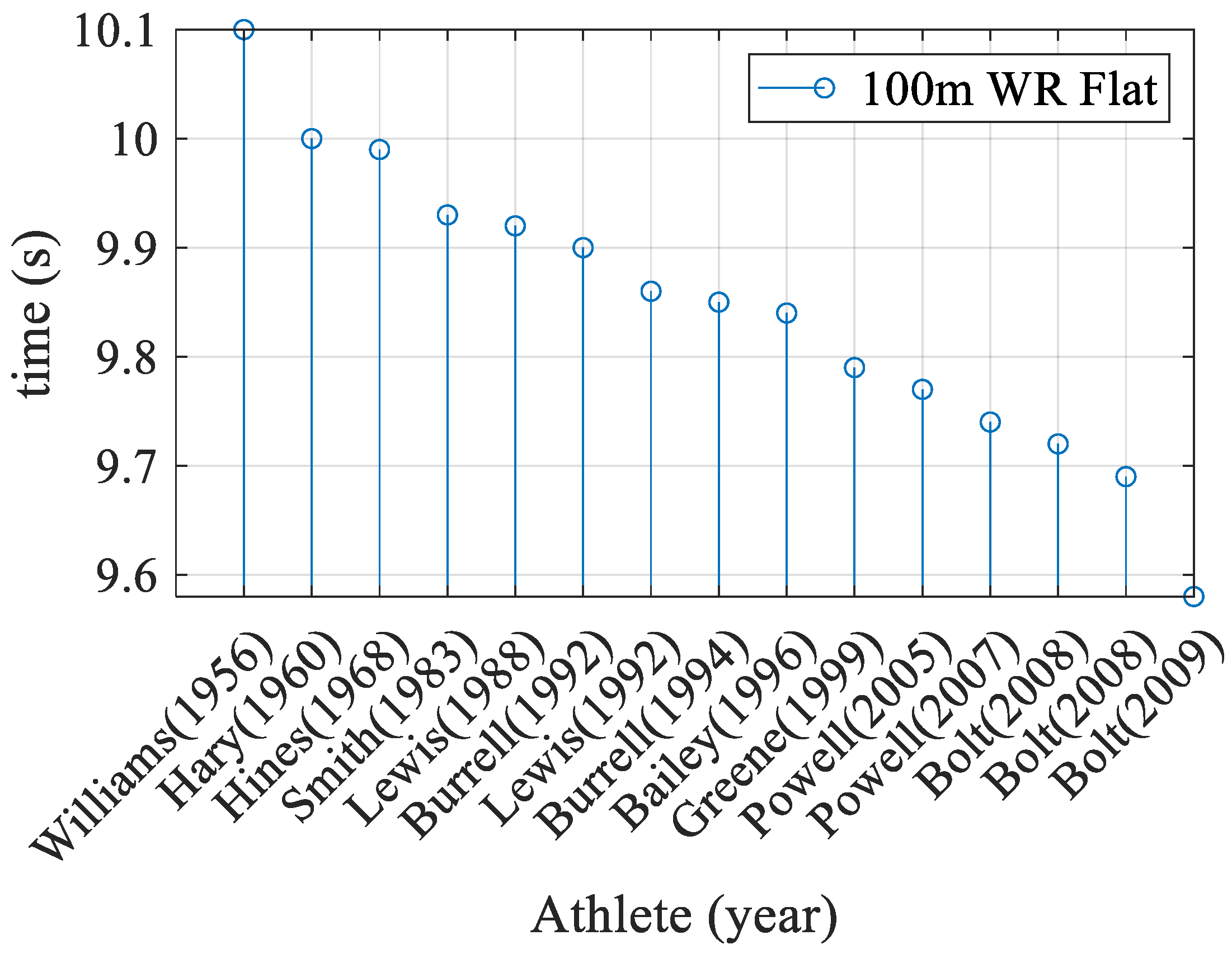
2. Biomechanics in Sports
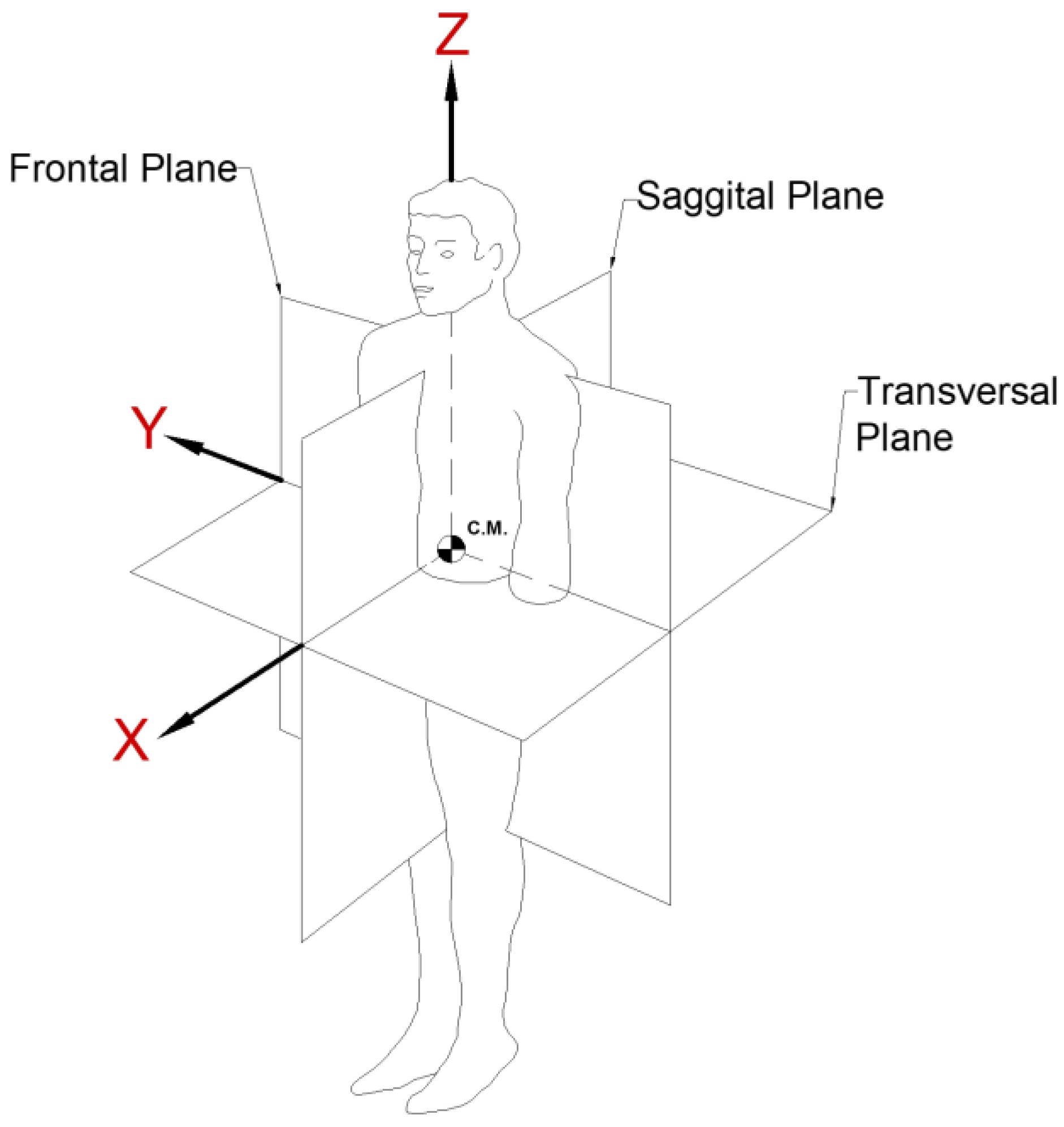
3. Spatial Coordinate System
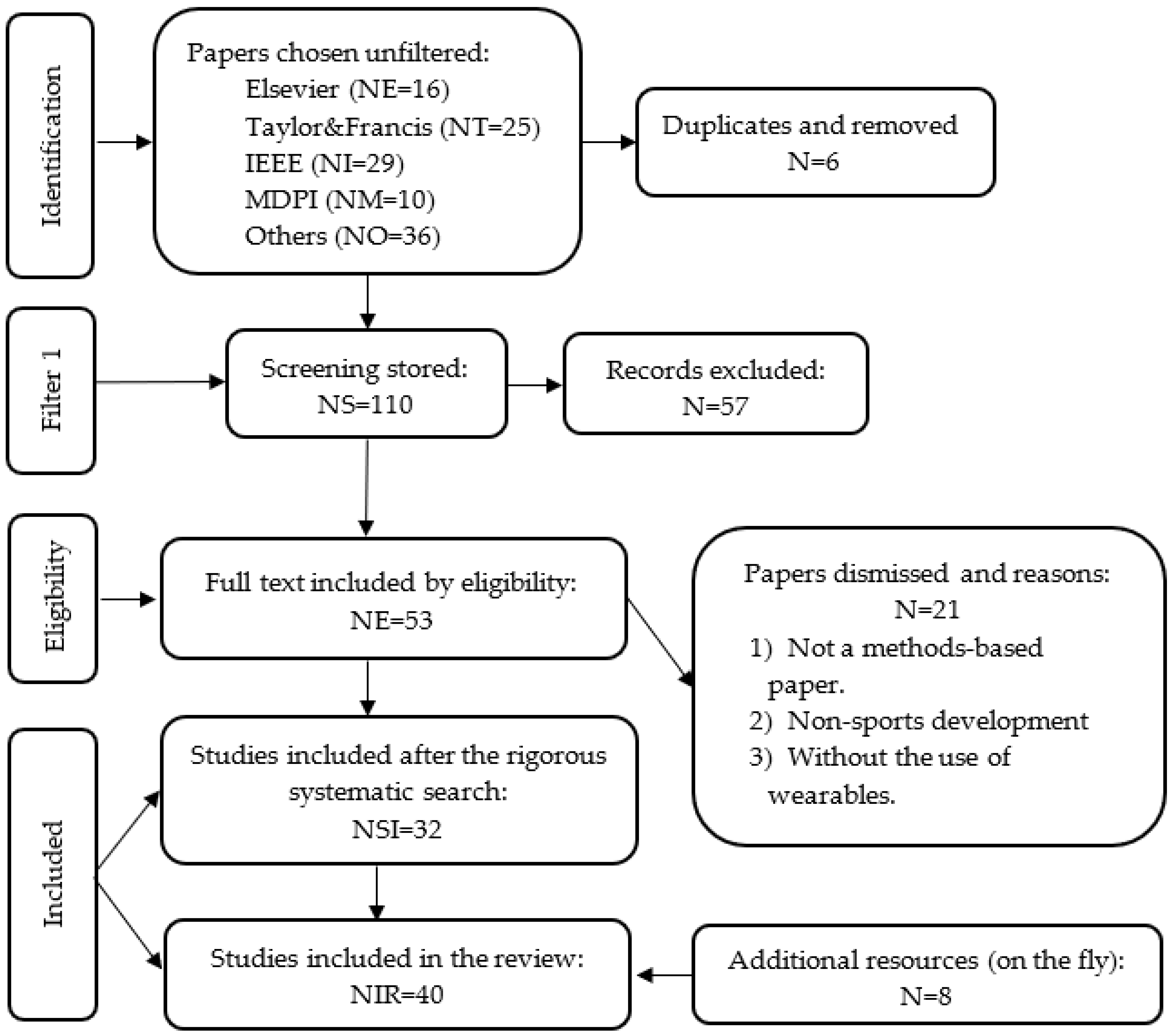
4. Methodology
- Articles published in Spanish and English;
- Search for articles through keywords such as: biomechanics, upper extremities, biomechanical analysis, biomechanical variables, joint mechanical power, and biomechanical IMU;
- Evaluate and thoroughly analyze the abstracts of the articles that were selected and make a classification by sport/skill approach;
- A complete reading of the articles highlighting important results.
5. Angular Displacements in the Upper Extremity
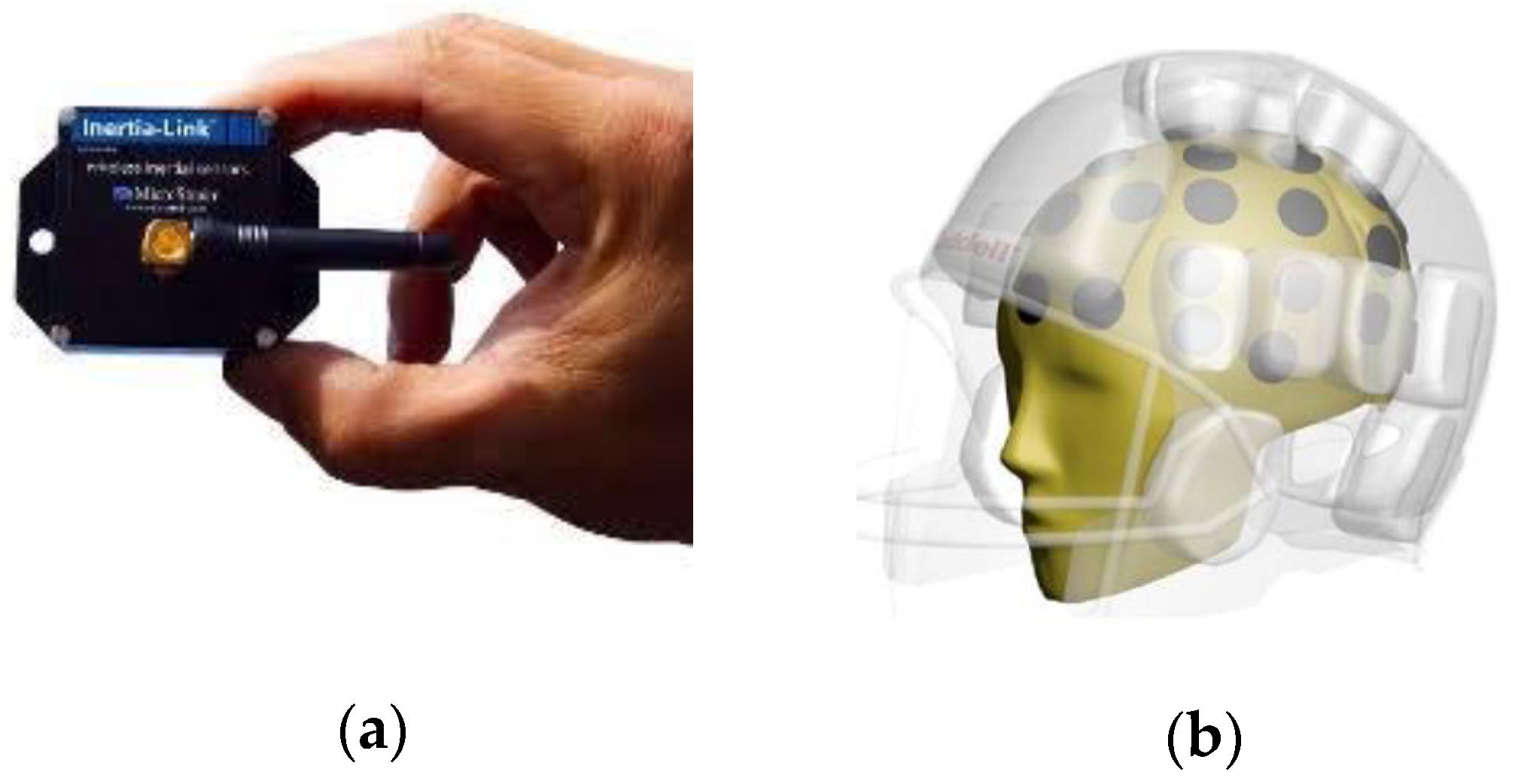
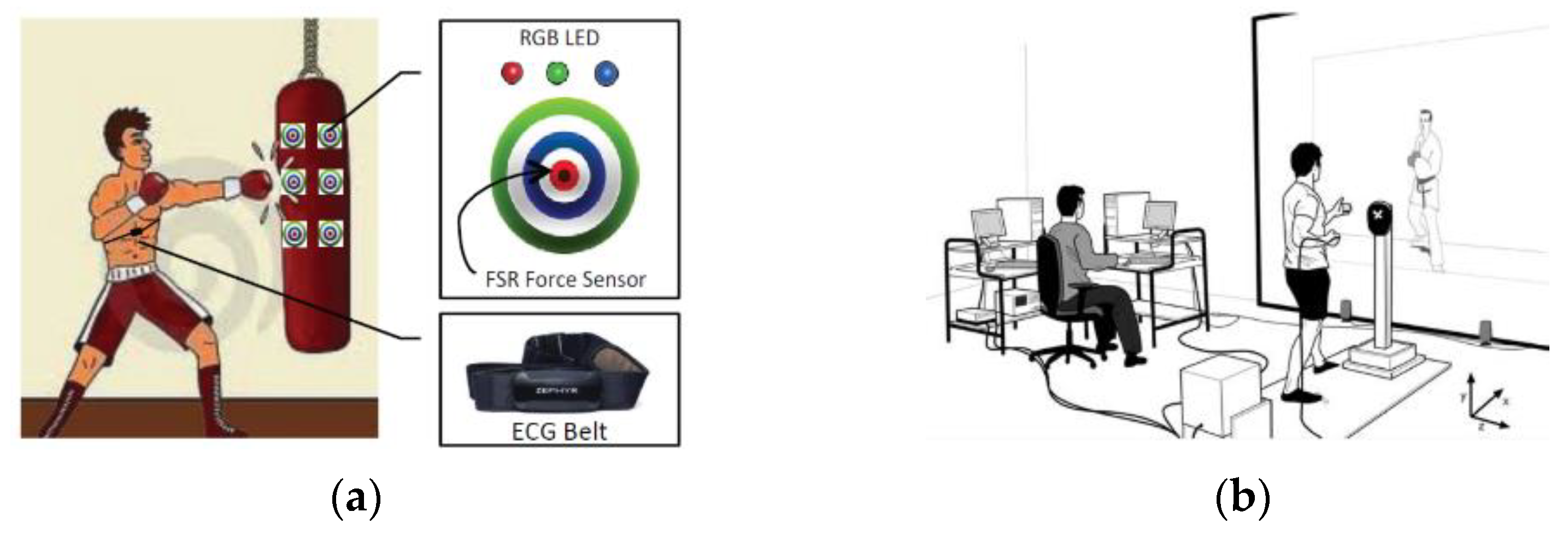
6. Measuring Instruments
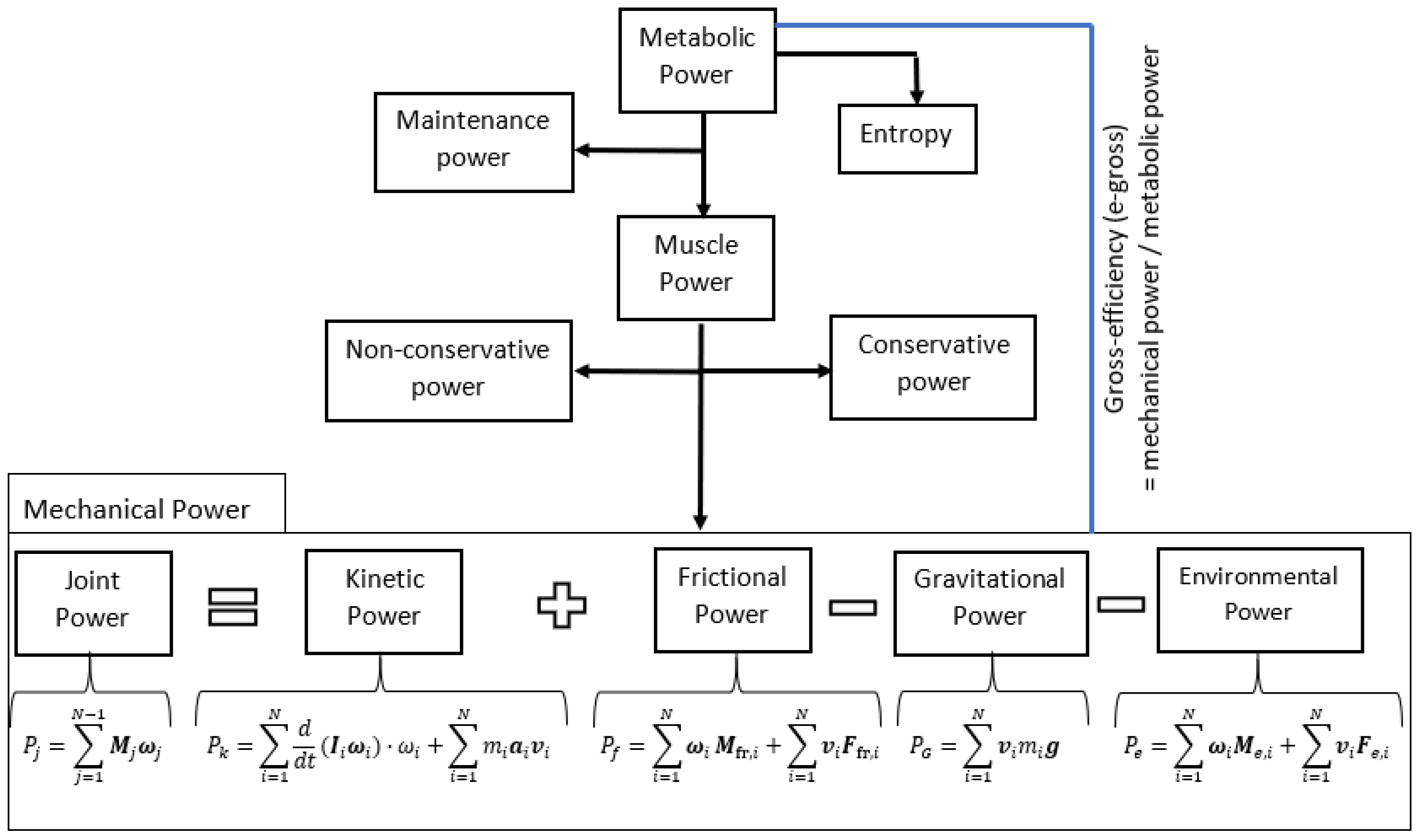
7. Use and Estimation of the Power Used
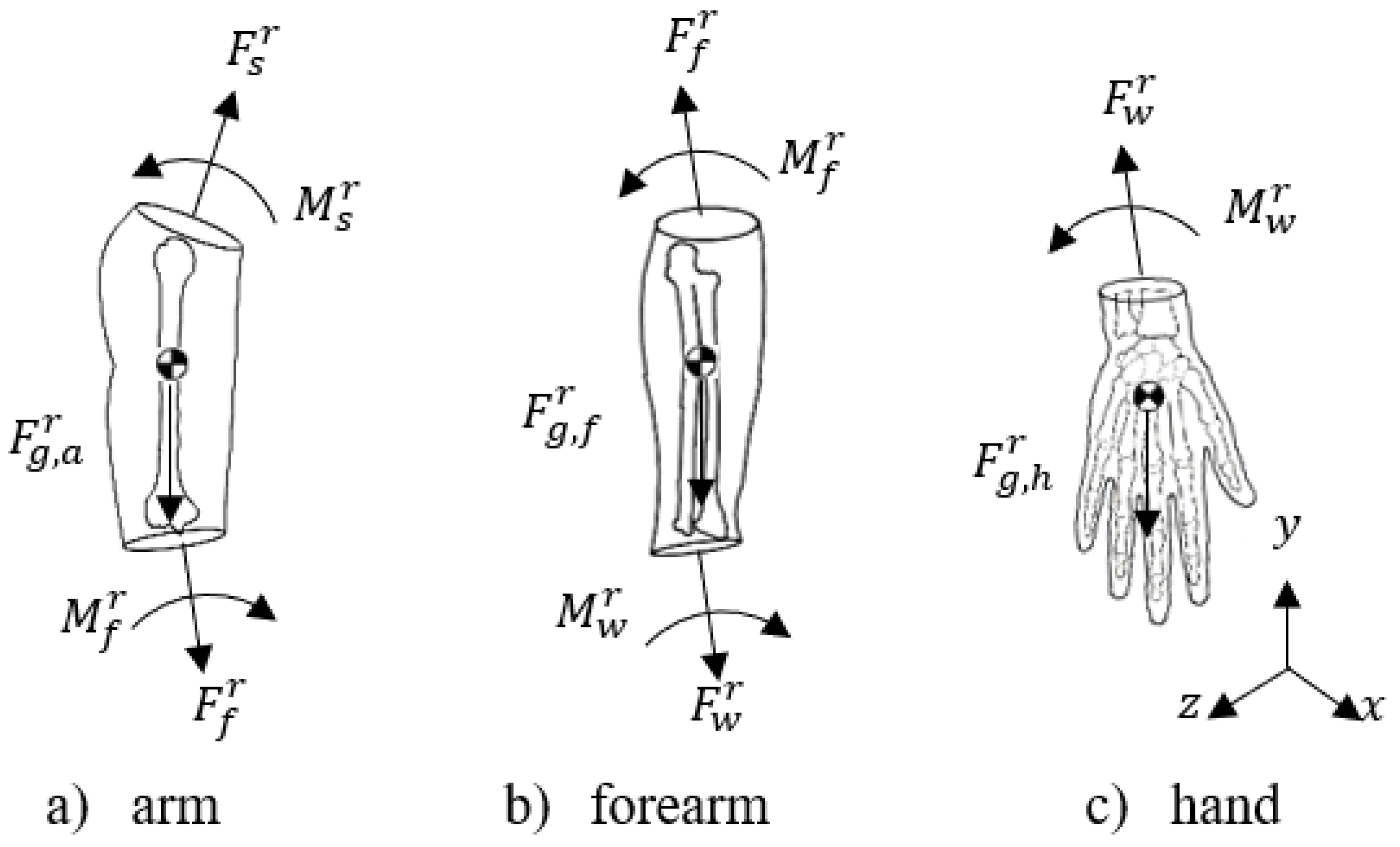
8. Mechanical Power Estimation Equations
- r: rotational;
- g: gravitational;
- s: shoulder;
- to: arm;
- f: forearm;
- w: wrist;
- h: hand.
9. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Lu, T.W.; Chang, C.F. Biomechanics of human movement and its clinical applications. Kaohsiung J. Med. Sci. 2012, 28, S13–S25. [Google Scholar] [CrossRef] [PubMed]
- Balthazard, P.; Currat, D.; Degache, F. Fundamentos de biomecánica. EMC—Kinesiterapia—Med. Física 2015, 36, 1–8. [Google Scholar] [CrossRef]
- Hughes, G.T.G.; Camomilla, V.; Vanwanseele, B.; Harrison, A.J.; Fong, D.T.P.; Bradshaw, E.J. Novel technology in sports biomechanics: Some words of caution. Sport. Biomech. 2021. [Google Scholar] [CrossRef] [PubMed]
- Marin, F.; Fradet, L.; Lepetit, K.; Hansen, C.; Ben, K.; De Poitiers, U.; Pprime, I.; Sport, B.; Cnrs, U.P.R. Inertial Measurement Unit in Biomechanics and Sport Biomechanics: Past, Present, Future Sorbonne Universités, Université de Technologie de Compiègne, UMR CNRS. 2015, pp. 1422–1424. Available online: https://www.researchgate.net/publication/305442293_INERTIAL_MEASUREMENT_UNIT_IN_BIOMECHANICS_AND_SPORT_BIOMECHANICS_PAST_PRESENT_FUTURE (accessed on 19 May 2022).
- Al-Halhouli, A.; Al-Ghussain, L.; Khallouf, O.; Rabadi, A.; Alawadi, J.; Liu, H.; Al Oweidat, K.; Chen, F.; Zheng, D. Clinical evaluation of respiratory rate measurements on copd (Male) patients using wearable inkjet-printed sensor. Sensors 2021, 21, 468. [Google Scholar] [CrossRef] [PubMed]
- Al-Halhouli, A.; Al-Ghussain, L.; El Bouri, S.; Habash, F.; Liu, H.; Zheng, D. Clinical evaluation of stretchable and wearable inkjet-printed strain gauge sensor for respiratory rate monitoring at different body postures. Appl. Sci. 2020, 10, 480. [Google Scholar] [CrossRef]
- Carpes, F.P.; da Rocha, E.S.; Kunzler, M.R.; Mello-Carpes, P.B. Using the Olympic spirit to improve teaching and learning process: The biomechanics Olympic Games. Adv. Physiol. Educ. 2017, 41, 436–440. [Google Scholar] [CrossRef]
- Haugen, T.; Paulsen, G.; Seiler, S.; Sandbakk, Ø. New Records in Human Power. Int. J. Sports Physiol. Perform. 2018, 13, 678–686. [Google Scholar] [CrossRef]
- Hudson, L.J. A Biomechanical Analysis by Skill Level of Free Throw Shooting in Basketball.pdf. 1982. Available online: https://ojs.ub.uni-konstanz.de/cpa/article/view/885 (accessed on 19 May 2022).
- Samozino, P.; Morin, J.B.; Hintzy, F.; Belli, A. A simple method for measuring force, velocity and power output during squat jump. J. Biomech. 2008, 41, 2940–2945. [Google Scholar] [CrossRef]
- McClay, I.S.; Robinson, J.R.; Andriacchi, T.P.; Frederick, E.C.; Gross, T.; Martin, P.; Valiant, G.; Williams, K.R.; Cavanagh, P.R. A Profile of Ground Reaction Forces in Professional Basketball. J. Appl. Biomech. 2016, 10, 222–236. [Google Scholar] [CrossRef]
- Fleisig, G.S.; Laughlin, W.A.; Aune, K.T.; Cain, E.L.; Dugas, J.R.; Andrews, J.R. Differences among fastball, curveball, and change-up pitching biomechanics across various levels of baseball. Sport. Biomech. 2016, 15, 128–138. [Google Scholar] [CrossRef]
- Thomson, E.; Lamb, K.; Nicholas, C. The development of a reliable amateur boxing performance analysis template. J. Sports Sci. 2013, 31, 516–528. [Google Scholar] [CrossRef] [PubMed]
- Jiang, C.; Olson, M.W.; Li, L. Determination of biomechanical differences between elite and novice San Shou female athletes. J. Exerc. Sci. Fit. 2013, 11, 9–12. [Google Scholar] [CrossRef]
- Morrey, B.F. Joint Replacement Arthroplasty, 3rd ed. J. Bone Jt. Surgery-Am. 2004, 86, 1853–1854. [Google Scholar] [CrossRef]
- Taboadela, C.H. Introducción a la Goniometría. Una Herramienta para la Evaluación de las Incapacidades Laborales; Asociart ART: Buenos Aires, Argentina, 2007; ISBN 9789879274040. [Google Scholar]
- Jaworski, Ł.; Karpiński, R.; Dobrowolska, A. BIOMECHANICS OF THE UPPER LIMB. J. Technol. Exploit. Mech. Eng. 2016, 2, 56–59. [Google Scholar] [CrossRef]
- Taborri, J.; Keogh, J.; Kos, A.; Santuz, A.; Umek, A.; Urbanczyk, C.; van der Kruk, E.; Rossi, S. Sport Biomechanics Applications Using Inertial, Force, and EMG Sensors: A Literature Overview. Appl. Bionics Biomech. 2020, 2020, 1–18. [Google Scholar] [CrossRef]
- Zhu, J.; Liu, X.; Shi, Q.; He, T.; Sun, Z.; Guo, X.; Liu, W.; Bin Sulaiman, O.; Dong, B.; Lee, C. Development trends and perspectives of future sensors and MEMS/NEMS. Micromachines 2020, 11, 7. [Google Scholar] [CrossRef]
- Beckwith, J.G.; Chu, J.J.; Greenwald, R.M. Validation of a noninvasive system for measuring head acceleration for use during boxing competition. J. Appl. Biomech. 2007, 23, 238–244. [Google Scholar] [CrossRef]
- Walilko, T.J.; Viano, D.C.; Bir, C.A. Biomechanics of the head for Olympic boxer punches to the face. Br. J. Sports Med. 2005, 39, 710–719. [Google Scholar] [CrossRef]
- Tung, M.H.; Senanayake, S.M.N.A.; Flyger, N. Biomechanical analysis of 10-pin bowling using wireless inertial sensor. In Proceedings of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Singapore, 14–17 July 2009; pp. 1130–1135. [Google Scholar]
- Mei, C.J.; Thomas, C.M.; Eid, M. A biofeedback interactive boxing system for optimal performance. In Proceedings of the 2014 IEEE International Instrumentation and Measurement Technology Conference (I2MTC), Montevideo, Uruguay, 12–15 May 2014; pp. 5–9. [Google Scholar] [CrossRef]
- Brétigny, P.; Seifert, L.; Leroy, D.; Chollet, D. Upper-limb kinematics and coordination of short grip and classic drives in field hockey. J. Appl. Biomech. 2008, 24, 215–223. [Google Scholar] [CrossRef]
- Martinez De Quel, O.; Bennett, S.J. Kinematics of self-initiated and reactive karate punches. Res. Q. Exerc. Sport 2014, 85, 117–123. [Google Scholar] [CrossRef]
- Alanen, A.M.; Räisänen, A.M.; Benson, L.C.; Pasanen, K. The use of inertial measurement units for analyzing change of direction movement in sports: A scoping review. Int. J. Sport. Sci. Coach. 2021, 16, 1332–1353. [Google Scholar] [CrossRef]
- Dinu, D.; Louis, J. Biomechanical Analysis of the Cross, Hook, and Uppercut in Junior vs. Elite Boxers: Implications for Training and Talent Identification. Front. Sport. Act. Living 2020, 2, 598861. [Google Scholar] [CrossRef] [PubMed]
- Shah, S.A.; Fioranelli, F. Human Activity Recognition: Preliminary Results for Dataset Portability using FMCW Radar. In Proceedings of the 2019 International Radar Conference (RADAR), Toulon, France, 23–27 September 2019; pp. 4–7. [Google Scholar] [CrossRef]
- Saeed, U.; Yaseen Shah, S.; Aziz Shah, S.; Liu, H.; Alhumaidi Alotaibi, A.; Althobaiti, T.; Ramzan, N.; Ullah Jan, S.; Ahmad, J.; Abbasi, Q.H. Multiple Participants’ Discrete Activity Recognition in a Well-Controlled Environment Using Universal Software Radio Peripheral Wireless Sensing. Sensors 2022, 22, 809. [Google Scholar] [CrossRef]
- Saponara, S. Wearable Biometric Performance Measurement System for Combat Sports. IEEE Trans. Instrum. Meas. 2017, 66, 2545–2555. [Google Scholar] [CrossRef]
- Chadli, S.; Ababou, N.; Ababou, A. A new instrument for punch analysis in boxing. Procedia Eng. 2014, 72, 411–416. [Google Scholar] [CrossRef]
- Favre, J.; Mass, Y.; Aminian, K. Study of Punches Performance in Boxe With Inetial Sensors. J. Biomech. 2007, 40, S539. [Google Scholar] [CrossRef][Green Version]
- Shum, H.P.H.; Komura, T.; Nagano, A. Automatic Evaluation of boxing techniques from captured shadow boxing data. J. Biomech. 2007, 40, 2007. [Google Scholar] [CrossRef]
- Loturco, I.; Pereira, L.A.; Kobal, R.; Fernandes, V.; Reis, V.P.; Romano, F.; Alves, M.; Freitas, T.T.; McGuigan, M. Transference effect of short-term optimum power load training on the punching impact of elite boxers. J. Strength Cond. Res. 2021, 35, 2373–2378. [Google Scholar] [CrossRef]
- Dinu, D.; Millot, B.; Slawinski, J.; Louis, J. An Examination of the Biomechanics of the Cross, Hook and Uppercut between Two Elite Boxing Groups. Proceedings 2020, 49, 61. [Google Scholar] [CrossRef]
- Mack, J.; Stojsih, S.; Sherman, D.; Dau, N.; Bir, C. Amateur boxer biomechanics and punch force. In Proceedings of the 28 International Conference on Biomechanics in Sports (2010), Marquette, MI, USA, 19–23 July 2010; pp. 2–5. [Google Scholar]
- Gavagan, C.J.; Sayers, M.G.L. A biomechanical analysis of the roundhouse kicking technique of expert practitioners: A comparison between the martial arts disciplines of Muay Thai, Karate, and Taekwondo. PLoS ONE 2017, 12, e0182645. [Google Scholar] [CrossRef]
- van der Kruk, E.; van der Helm, F.C.T.; Veeger, H.E.J.; Schwab, A.L. Power in sports: A literature review on the application, assumptions, and terminology of mechanical power in sport research. J. Biomech. 2018, 79, 1–14. [Google Scholar] [CrossRef] [PubMed]
- Błazkiewicz, M.; Łysoń, B.; Chmielewski, A.; Wit, A. Transfer of mechanical energy during the shot put. J. Hum. Kinet. 2016, 52, 139–146. [Google Scholar] [CrossRef] [PubMed]
- Arampatzis, A.; Knicker, A.; Metzler, V.; Brüggemann, G.P. Mechanical power in running: A comparison of different approaches. J. Biomech. 2000, 33, 457–463. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Anatomical Reference | Articulation | Movement | Range Min/Max | Illustration |
|---|---|---|---|---|
| Arm | Shoulder (Glenohumeral) | Flexion | 0°/150° to 170° |  |
| Extension | 0°/40° | |||
| Abduction | 0°/160° to 180° |  | ||
| Adduction | 0°/30° | |||
| External Rotation | 0°/70° |  | ||
| Internal Rotation | 0°/70° | |||
| Forearm | Elbow | Flexion | 0°/150° |  |
| Extension | 0°/10° | |||
| Proximal and distal radioulnar | Pronation/ Supination | 0°/90° |  |
| Article | Sensor/Camera/EMG Used (Software) | DOF | Sport | Velocity Analysis | Acceleration Analysis | Force/Power Analysis | Test Subject |
|---|---|---|---|---|---|---|---|
| (Thomson, et al., 2013) | Canon MV700 (DartFish TeamPro 4.0) | NA | Box | NA | NA | NA | 2 |
| (Beckwith, et al., 2007) | Endevco 7264-B | 5 head/neck | Box | No | Rotational and linear | No | U |
| (Mei, et al., 2014) | Zephyr Bioharness ECG wearable sensor | DA | Box | No | No | No | 11 |
| (Martínez de Quel, et al., 2014) | Ascension trakSTAR Model 800 (Cogent 2000 toolbox by Matlab) | DA | Karate | yes | yes | Force | 32 |
| (Saponara, 2017) | Sparkfun ADXL377 celda de carga HX711 | DA | Sports combat | yes | yes | Force | 7 |
| (Chadli, et al., 2014) | Strain gauges, accelerometer | DA | Box | No | yes | Force | 11 |
| (Favre, et al., 2015) | 3 Accelerometers, 3 gyroscopes | DA | Box | No | No | No | 8 |
| (Walilko, et al., 2005) | Tekscan pressure sensor Model 9500 | DA | Box | yes | Rotational and linear | Force and power | 10 |
| (Shum, et al., 2007) | (MotionGraph) | DA | Box | No | Si | No | 2 |
| (Loturco, et al., 2021) | Force Plate AccuPower AMTI | DA | Box | No | No | Force | 8 |
| (Dinu and Louis, 2020) | MVN Biomech Link Suit Xsens (Matlab R2010a) | DA | Box | yes | yes | Force | 23 |
| (Dinu, et al., 2020) | Suit Xsens (Matlab R2010a) | DA | Box | yes | yes | Force | 23 |
| (Mack, et al., 2010) | Endevco 7264-2K, Redlake HG 100K camera (TrackEye Motion analysis) | DA | Box | yes | No | Force | 42 |
| (Gavan and Sayers, 2017) | Qualisys Motion Capture System (PowerLab System) | DA | Sports Contact | yes | No | No | 24 |
| Sensor | Characteristics | ||||
|---|---|---|---|---|---|
| IMU Type | Accelerometer Accuracy | Gyroscope Accuracy | Sampling Rate | Measurements | |
| Microstrain wireless inertial sensor 3DM-CV5-10 | 3-DOF Accelerometer and 3DOF gyroscope | ±4 g, (optional) | ±1000°/s (optional) | Up to 1000 Hz | 38 × 24 × 9.7 mm |
| Vicon Blue Trident | 3--DOF Accelerometer 3-DOF Gyroscope 3-DOF Magnetometer | Low-g ±16 g/High-g ±200 g | ±2000 deg/s | Up to 1600 Hz | 42 × 27 × 11 mm |
| Sparkfun ADXL377 | 3-DOF Accelerometer | ±200 g | NA | 1 kHz | 3 × 3 × 1.45 mm |
| Xsens: Mtw Awinda | 3-DOF Accelerometer 3-DOF Gyroscope 3-DOF Magnetometer | ± 160 m/s2 | ±2000 deg/s | 1000 Hz | 148 × 104 × 31.9 mm |
| Endevco 7264-BM2-300 | 1-DOF Accelerometer | ±500 g | NA | 3 kHz | 40 × 48 × 18.5 mm |
| Witmotion WT901BLECL | 3-DOF Accelerometer 3-DOF Gyroscope 3-DOF Magnetometer | ±160 m/s2 | ±2000 deg/s | 200 Hz | 51.3 × 36 × 15 mm |
| InterSense Inertia Cube 3 | 3-DOF Gyroscope | NA | ±2000 deg/s | 200 Hz | 36.6 × 27.7 × 13.8 mm |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Blanco Ortega, A.; Isidro Godoy, J.; Szwedowicz Wasik, D.S.; Martínez Rayón, E.; Cortés García, C.; Ramón Azcaray Rivera, H.; Gómez Becerra, F.A. Biomechanics of the Upper Limbs: A Review in the Sports Combat Ambit Highlighting Wearable Sensors. Sensors 2022, 22, 4905. https://doi.org/10.3390/s22134905
Blanco Ortega A, Isidro Godoy J, Szwedowicz Wasik DS, Martínez Rayón E, Cortés García C, Ramón Azcaray Rivera H, Gómez Becerra FA. Biomechanics of the Upper Limbs: A Review in the Sports Combat Ambit Highlighting Wearable Sensors. Sensors. 2022; 22(13):4905. https://doi.org/10.3390/s22134905
Chicago/Turabian StyleBlanco Ortega, Andrés, Jhonatan Isidro Godoy, Dariusz Slawomir Szwedowicz Wasik, Eladio Martínez Rayón, Claudia Cortés García, Héctor Ramón Azcaray Rivera, and Fabio Abel Gómez Becerra. 2022. "Biomechanics of the Upper Limbs: A Review in the Sports Combat Ambit Highlighting Wearable Sensors" Sensors 22, no. 13: 4905. https://doi.org/10.3390/s22134905
APA StyleBlanco Ortega, A., Isidro Godoy, J., Szwedowicz Wasik, D. S., Martínez Rayón, E., Cortés García, C., Ramón Azcaray Rivera, H., & Gómez Becerra, F. A. (2022). Biomechanics of the Upper Limbs: A Review in the Sports Combat Ambit Highlighting Wearable Sensors. Sensors, 22(13), 4905. https://doi.org/10.3390/s22134905