
A Novel Method to Measure the Static Coefficient of Friction for Socks


{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
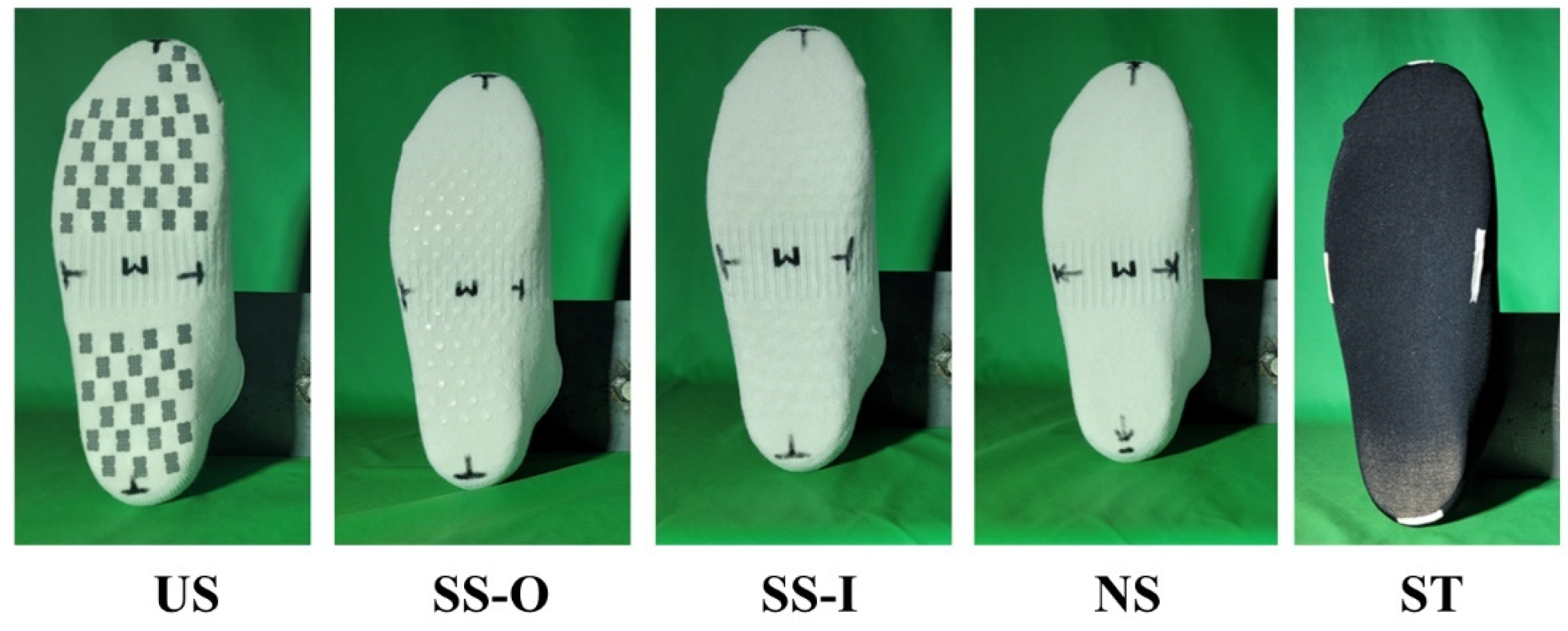
2.1. Types of Socks
2.2. The Mechanical Ramp Tester and Last
2.3. A Ramp Protocol to Measure the Static Coefficient of Friction
2.4. Statistical Analyses
3. Results
4. Discussion
4.1. The Reliability of Static COF Values Measured by the Ramp Protocol
4.2. The Ramp Protocol Could Be Used to Measure the Static COF for Socks
4.3. The Ramp Protocol Using the Last Could Be a Time Efficent and Flexible Option for Measuring the Static COF Values for Socks
4.4. Study Limitations
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Baussan, E.; Bueno, M.A.; Rossi, R.M.; Derler, S. Analysis of current running sock structures with regard to blister prevention. Text. Res. J. 2013, 83, 836–848. [Google Scholar] [CrossRef]
- Knapik, J.J. Prevention of foot blisters. J. Spec. Oper. Med. A Peer Rev. J. SOF Med. Prof. 2014, 14, 95–97. [Google Scholar] [CrossRef]
- Delporte, C. New socks offer relief, blister guard system with Teflon reduces friction between foot and sock. Am. Text. Int. 1997, 26, K-A. [Google Scholar]
- Dai, X.-Q.; Li, Y.; Zhang, M.; Cheung, J.T.-M. Effect of sock on biomechanical responses of foot during walking. Clin. Biomech. 2006, 21, 314–321. [Google Scholar] [CrossRef]
- Chari, S.; Haines, T.; Varghese, P.; Economidis, A. Are non-slip socks really’non-slip’? An analysis of slip resistance. BMC Geriatr. 2009, 9, 39. [Google Scholar] [CrossRef] [Green Version]
- Morin, J.-B.; Edouard, P.; Samozino, P. Technical ability of force application as a determinant factor of sprint performance. Med. Sci. Sports Exerc. 2011, 43, 1680–1688. [Google Scholar] [CrossRef]
- Sanders, J.E.; Greve, J.M.; Mitchell, S.B.; Zachariah, S.G. Material properties of commonly-used interface materials and their static coefficients of friction with skin and socks. J. Rehabil. Res. Dev. 1998, 35, 161–176. [Google Scholar]
- Van Amber, R.R.; Lowe, B.J.; Niven, B.E.; Laing, R.M.; Wilson, C.A.; Collie, S. The effect of fiber type, yarn structure and fabric structure on the frictional characteristics of sock fabrics. Text. Res. J. 2015, 85, 115–127. [Google Scholar] [CrossRef]
- Chaffin, D.B.; Woldstad, J.C.; Trujillo, A. Floor/shoe slip resistance measurement. Am. Ind. Hyg. Assoc. J. 1992, 53, 283–289. [Google Scholar] [CrossRef]
- Kalebek, N.A.; Babaarslan, O. Effect of weight and apllied force on the friction coefficient of the spunlace nonwoven fabrics. Fibers Polym. 2010, 11, 277–284. [Google Scholar] [CrossRef]
- Carré, M.; Tasron, D.; Lewis, R.; Hashmi, F. Investigating foot-sock friction: A comparison of two different methodologies. Procedia Eng. 2016, 147, 759–764. [Google Scholar] [CrossRef] [Green Version]
- Kaplan, S.; Karaman, C. Skin-Fabric Friction and Other Performance Characteristics of Socks Fabrics Produced from Cellulosic Fibers. Text. Appar. 2018, 28, 213–220. [Google Scholar]
- Ali, W.Y. Friction behaviour of Bare Foot and Foot Wearing Socks Sliding against Marble Flooring Tiles. JKAU Eng. Sci. 2010, 21, 83–104. [Google Scholar] [CrossRef]
- D’Souza, B.; Kasar, A.K.; Jones, J.; Skeete, A.; Rader, L.; Kumar, P.; Menezes, P.L. A Brief Review on Factors Affecting the Tribological Interaction between Human Skin and Different Textile Materials. Materials 2022, 15, 2184. [Google Scholar] [CrossRef]
- Tapie, E.; Guo, Y.B.; Shim, V.P.W. Yarn mobility in woven fabrics–a computational and experimental study. Int. J. Solids Struct. 2016, 80, 212–226. [Google Scholar] [CrossRef]
- Wang, X.; Liu, P.; Wang, F. Fabric-skin friction property measurement system. Int. J. Cloth. Sci. Technol. 2010, 22, 285–296. [Google Scholar] [CrossRef]
- Derler, S.; Gerhardt, L.-C. Tribology of skin: Review and analysis of experimental results for the friction coefficient of human skin. Tribol. Lett. 2012, 45, 1–27. [Google Scholar] [CrossRef] [Green Version]
- Bernstein, N.A. The Co-Ordination and Regulation of Movements; Pergamon Press: Oxford, UK, 1967. [Google Scholar]
- Xingfang, L. Measurements of the friction coefficient of insole fabric. In Proceedings of the Textile Bioengineering and Informatics Symposium Proceedings, Shanghai, China, 16–19 May 2010; pp. 1406–1410. [Google Scholar]
- Health and Safety Laboratory RR533—Ramp Testing Pre-Engineered Wood Floors. Health and Safety Executive. 2007. Available online: https://www.hse.gov.uk/research/rrpdf/rr533.pdf (accessed on 6 April 2022).
- Yamaguchi, T.; Yamada, R.; Warita, I.; Shibata, K.; Ohnishi, A.; Sugama, A.; Hinoshita, M.; Sakauchi, K.; Matsukawa, S.; Hokkirigawa, K. Relationship between slip angle in ramp test and coefficient of friction values at shoe-floor interface measured with cart-type friction measurement device. J. Biomech. Sci. Eng. 2018, 13, 17–00389. [Google Scholar] [CrossRef] [Green Version]
- Lewis, S.R.; Hallas, K.; Keen, B.; Hunwin, G.; Shaw, R.; Carré, M.J. Development of a new shoe/floor slip resistance test rig. Tribol. Int. 2020, 151, 106500. [Google Scholar] [CrossRef]
- Nagata, H.; Ohno, H. Analysis of backward falls caused by accelerated floor movements using a dummy. Ind. Health 2007, 45, 462–466. [Google Scholar] [CrossRef] [Green Version]
- Nagata, H.; Watanabe, H.; Inoue, Y.; Kim, I.-J. Fall risks and validities of various methods to measure frictional properties of slippery floors covered with soapsuds. In Proceedings of the 17th World Congress on Ergonomics, Beijing, China, 9–14 August 2009. [Google Scholar]
- Dąbrowska, A.K.; Rotaru, G.; Derler, S.; Spano, F.; Camenzind, M.; Annaheim, S.; Stämpfli, R.; Schmid, M.; Rossi, R.M. Materials used to simulate physical properties of human skin. Ski. Res. Technol. 2016, 22, 3–14. [Google Scholar] [CrossRef] [PubMed]
- Landis, J.R.; Koch, G.G. The measurement of observer agreement for categorical data. Biometrics 1977, 33, 159–174. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Redfern, M.S.; Marcotte, A.; Chaffin, D.B. A dynamic coefficient of friction measurement device for shoe/floor interface testing. J. Safety Res. 1990, 21, 61–65. [Google Scholar] [CrossRef] [Green Version]
- Lo, W.T. New methods for evaluating physical and thermal comfort properties of orthotic materials used in insoles for patients with diabetes. J. Rehabil. Res. Dev. 2014, 51, 311. [Google Scholar] [CrossRef]
- DeBois, I.; Agarwal, E.; Kapoor, A.; Mathur, K. Tribology of The Sock-Skin Interface–The Influence of Different Fabric Parameters on Sock Friction; Research Sqaure: Durham, NC, USA, 2021. [Google Scholar]
- Tasron, D.N.; Thurston, T.J.; Carré, M.J. Frictional behaviour of running sock textiles against plantar skin. Procedia Eng. 2015, 112, 110–115. [Google Scholar] [CrossRef] [Green Version]
- Apps, C.; Rodrigues, P.; Isherwood, J.; Lake, M. Footwear insoles with higher frictional properties enhance performance by reducing in-shoe sliding during rapid changes of direction. J. Sports Sci. 2020, 38, 206–213. [Google Scholar] [CrossRef] [PubMed]
- Mailler, E.A.; Adams, B.B. The wear and tear of 26.2: Dermatological injuries reported on marathon day. Br. J. Sports Med. 2004, 38, 498–501. [Google Scholar] [CrossRef]
- Winter, D.A. Kinematic and kinetic patterns in human gait: Variability and compensating effects. Hum. Mov. Sci. 1984, 3, 51–76. [Google Scholar] [CrossRef]
- Adams, P.S.; Redfern, M.S. The Effect of Applied Vertical Force on Static Coefficient of Friction Measurements for Industrial Floorsby Paul S. Adams, Mark S. Redfern. IOE. Tech. Rep. 1992, 92-57. Available online: https://deepblue.lib.umich.edu/bitstream/handle/2027.42/3167/bbl3634.0001.001.pdf?sequence=5 (accessed on 6 April 2022).




Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Eun, J.; Ryue, J.; Park, S.; Lee, K. A Novel Method to Measure the Static Coefficient of Friction for Socks. Sensors 2022, 22, 5525. https://doi.org/10.3390/s22155525
Eun J, Ryue J, Park S, Lee K. A Novel Method to Measure the Static Coefficient of Friction for Socks. Sensors. 2022; 22(15):5525. https://doi.org/10.3390/s22155525
Chicago/Turabian StyleEun, Jinsu, Jaejin Ryue, Sangsoo Park, and Kikwang Lee. 2022. "A Novel Method to Measure the Static Coefficient of Friction for Socks" Sensors 22, no. 15: 5525. https://doi.org/10.3390/s22155525
APA StyleEun, J., Ryue, J., Park, S., & Lee, K. (2022). A Novel Method to Measure the Static Coefficient of Friction for Socks. Sensors, 22(15), 5525. https://doi.org/10.3390/s22155525