
Near-Field High-Resolution SAR Imaging with Sparse Sampling Interval


Abstract
:1. Introductions
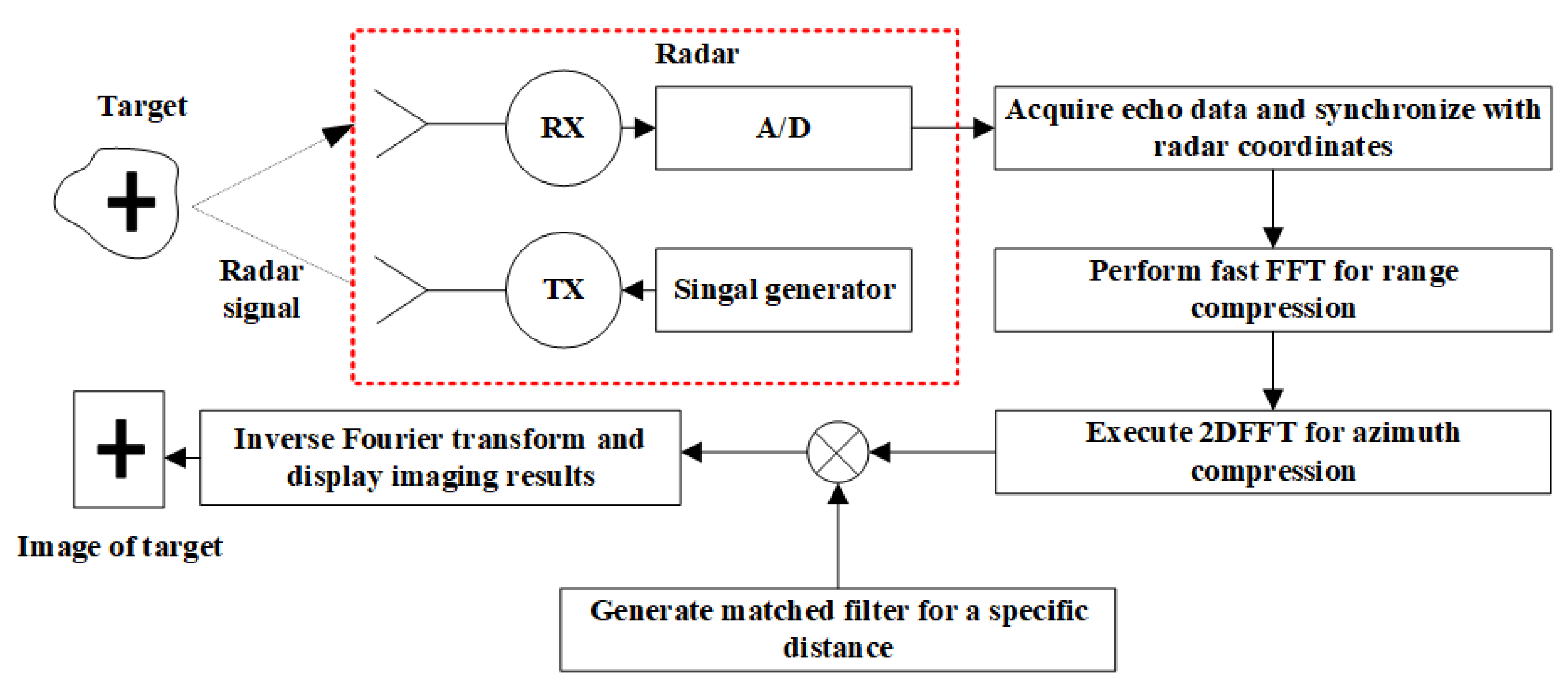
2. Module and Algorithm
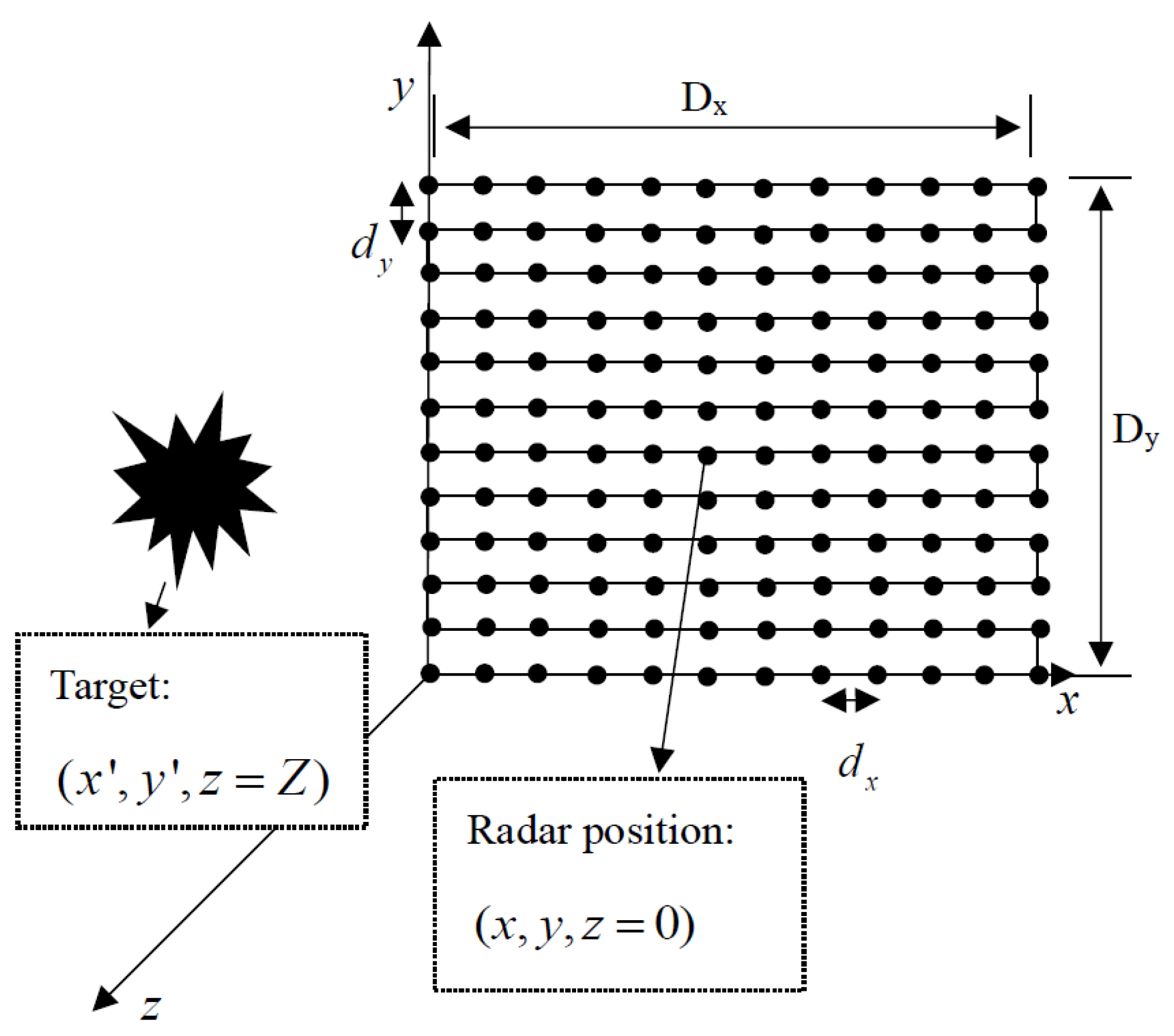
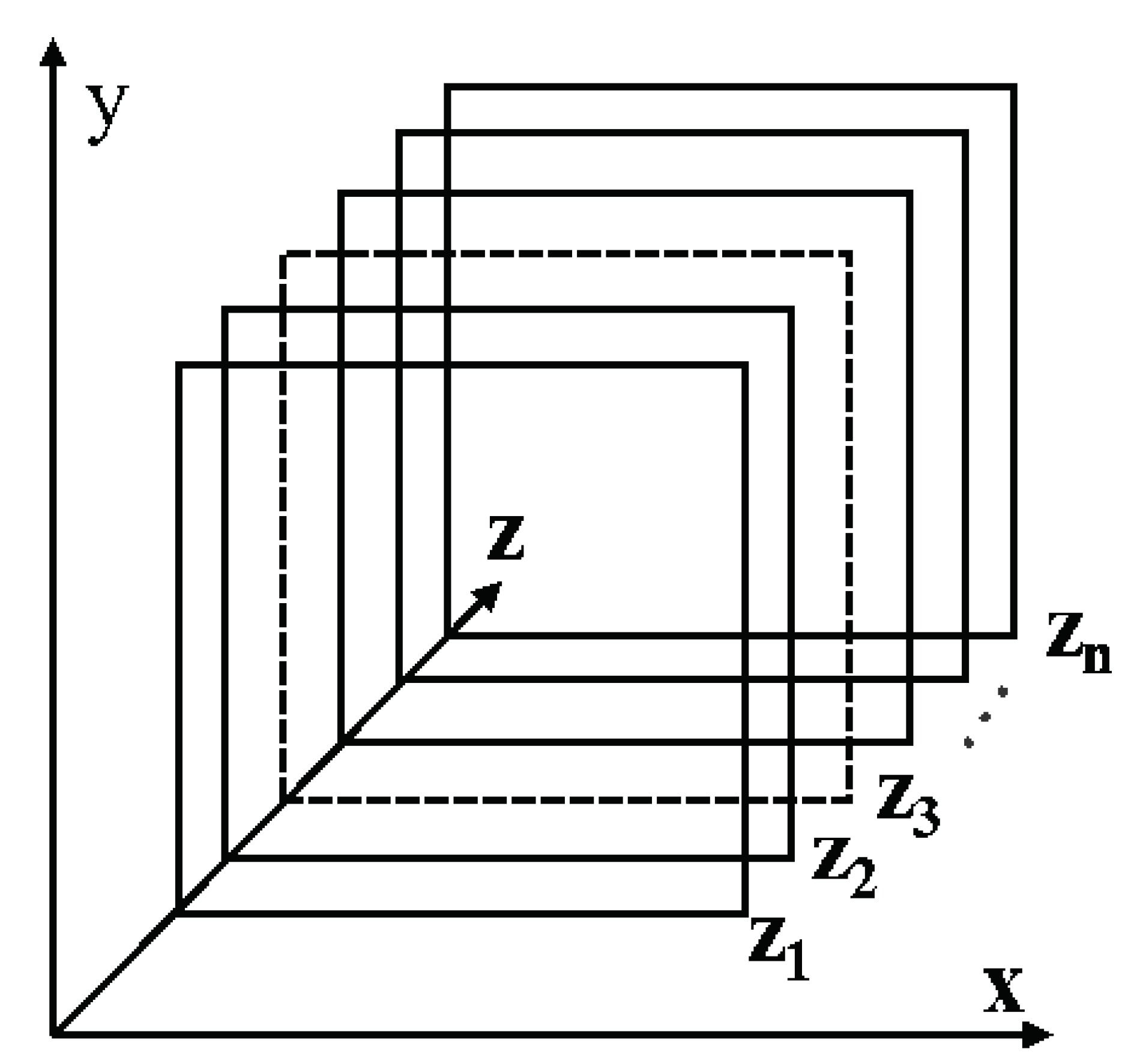
2.1. Near-Field SAR Module
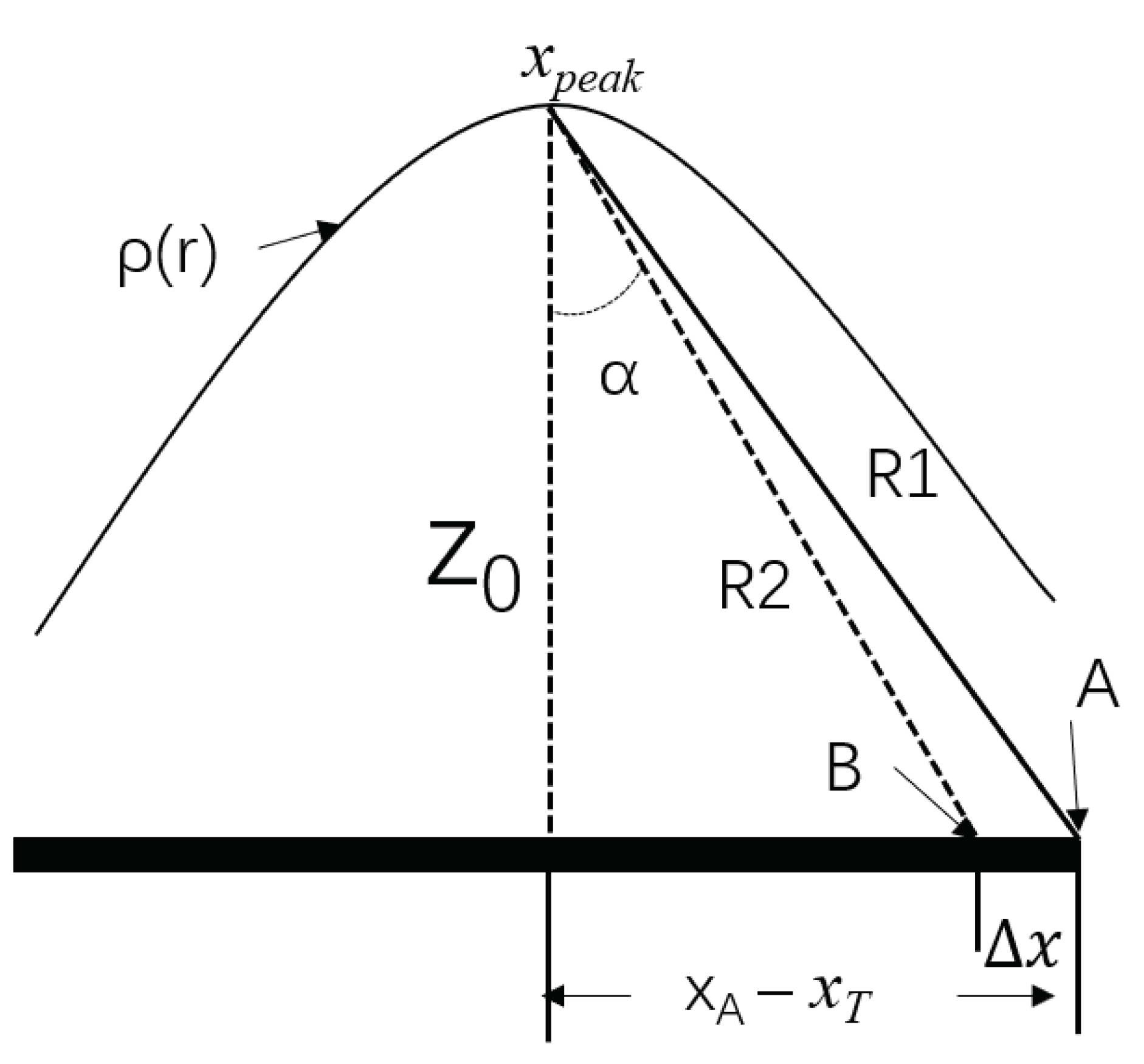
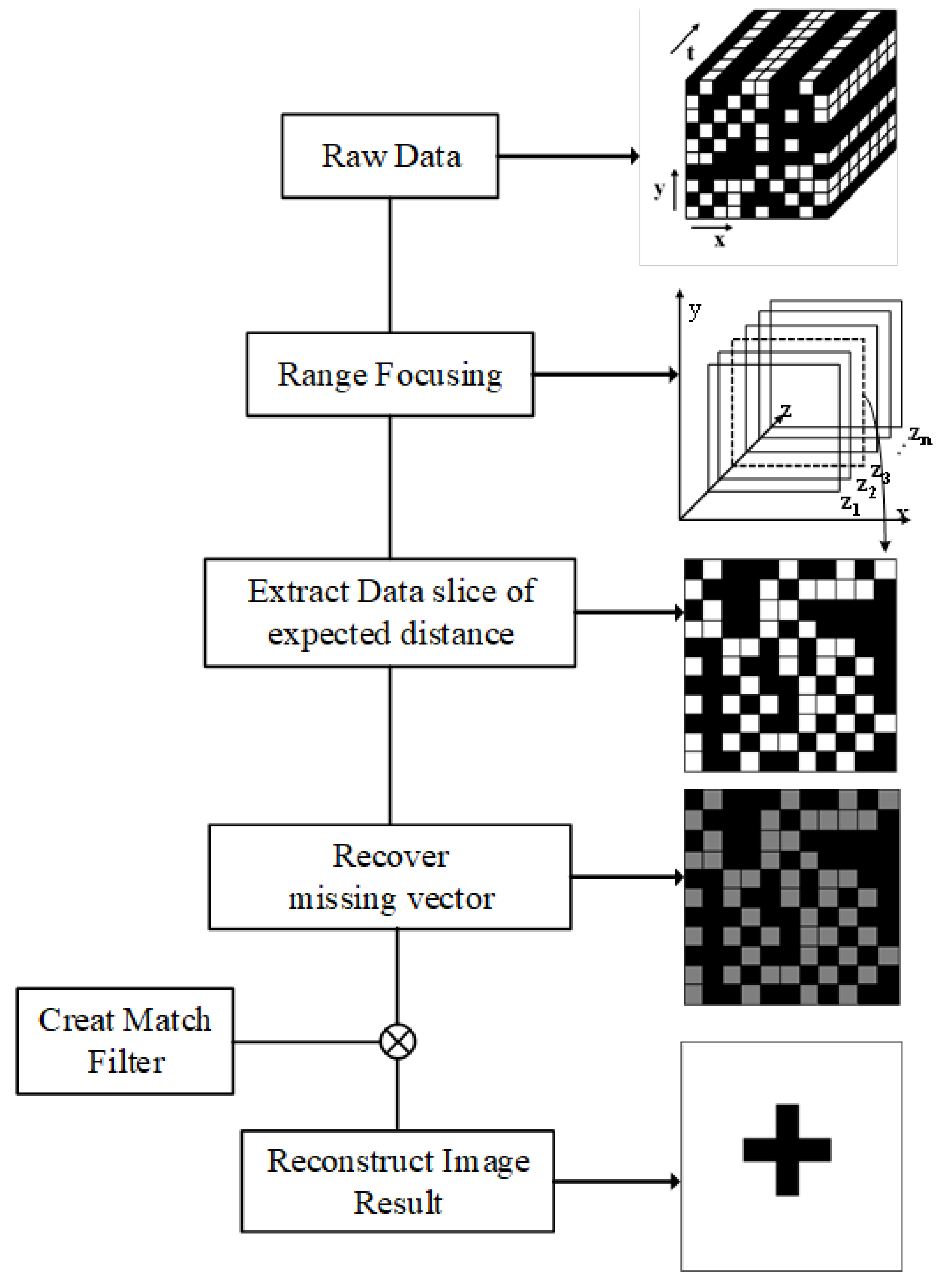
2.2. Under-Sampling Recovery Reconstruction Method
| Algorithm 1 Spatial under-sampling image reconstruction method based on amplitude and phase compensation |
Input: under-sampled data with coordinate markers Output: Image reconstruction results Initialize all parameters of synthetic aperture radar The time domain data of each coordinate is compressed Obtain the distance focus data slice of the estimated distance Obtain the full amplitude matrix through with interpolation Construct the phase data matrix to be recovered with for all do if then replace with calculated results from nearest known element end if end for Create match filter Reconstruction of target area |
3. Experimentation and Results
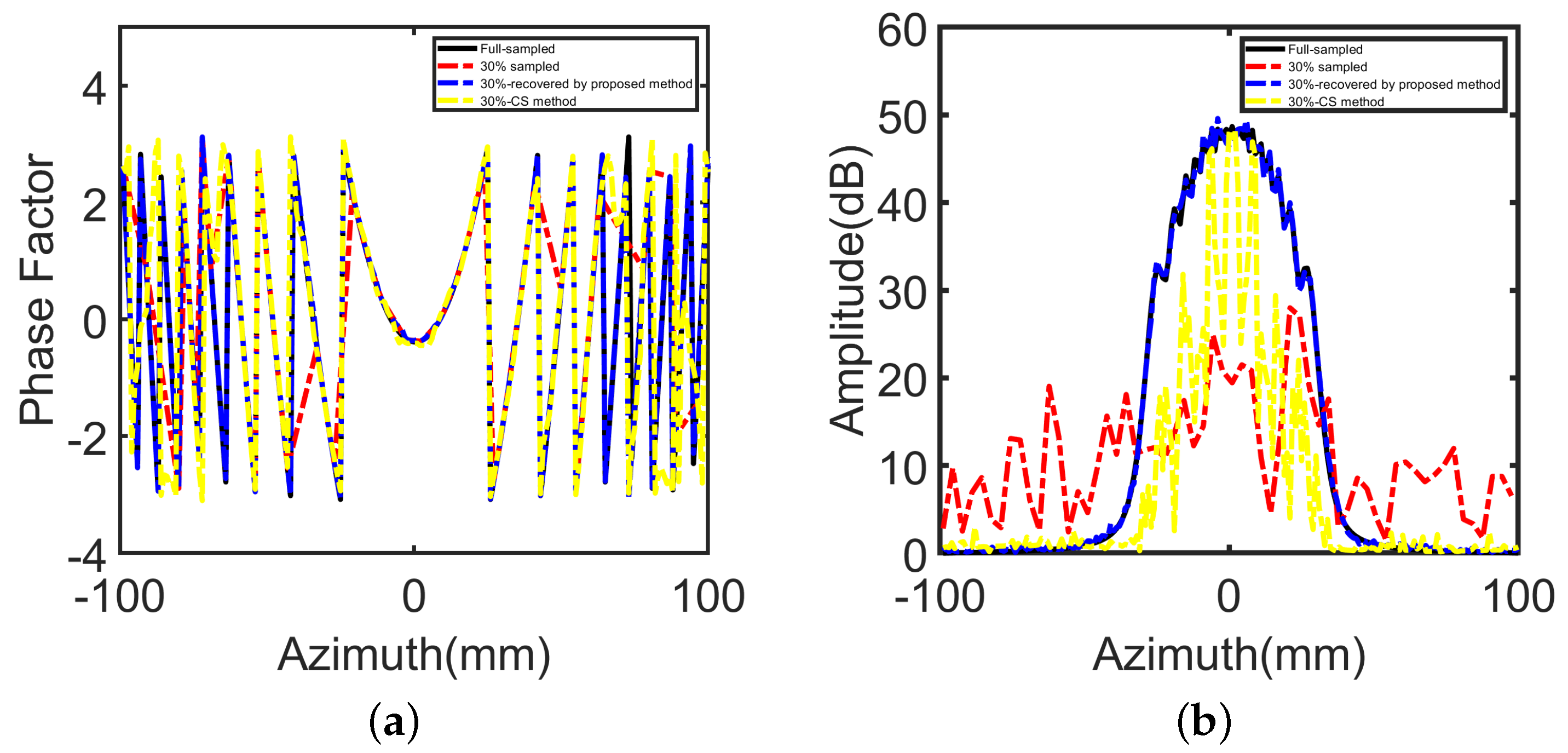
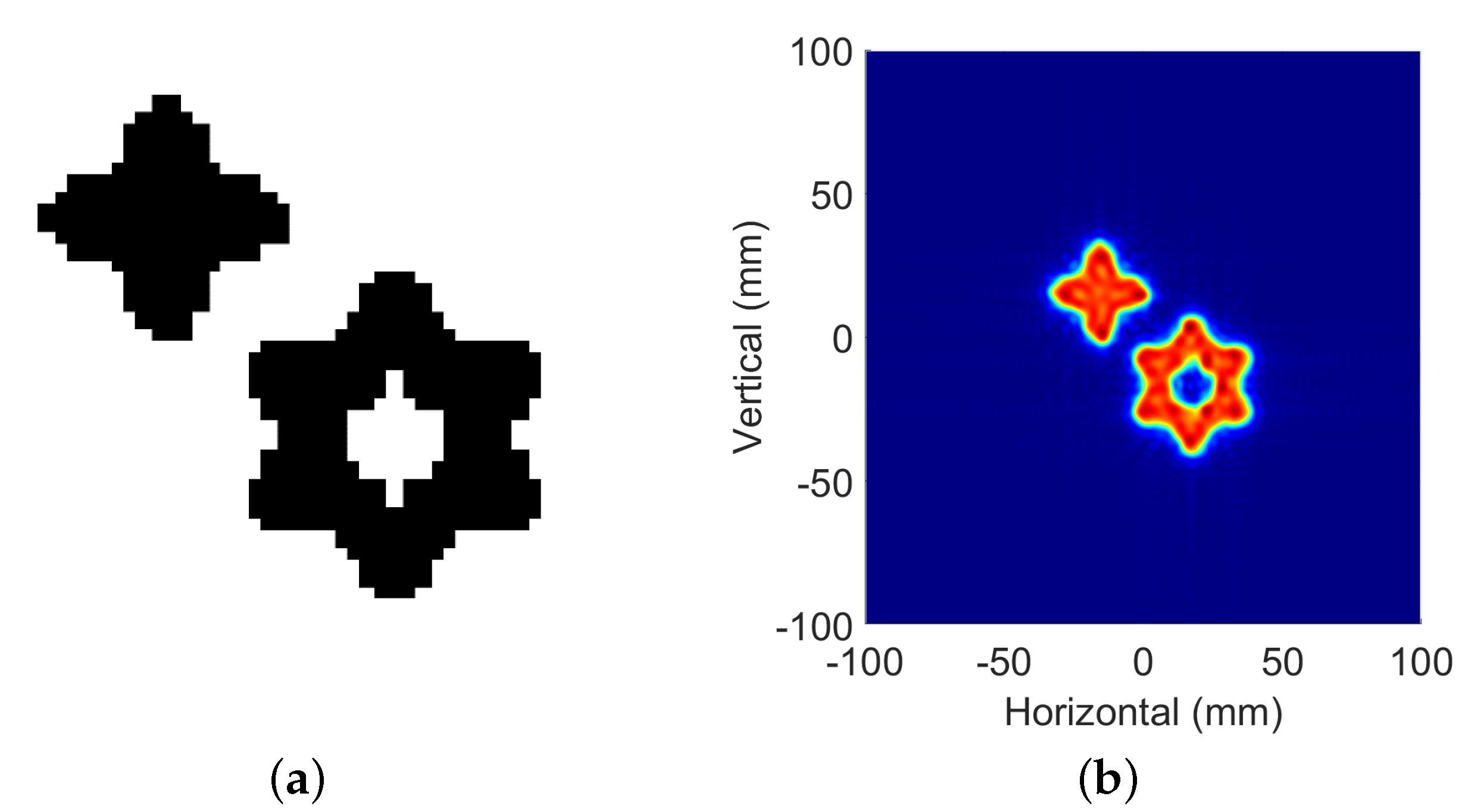
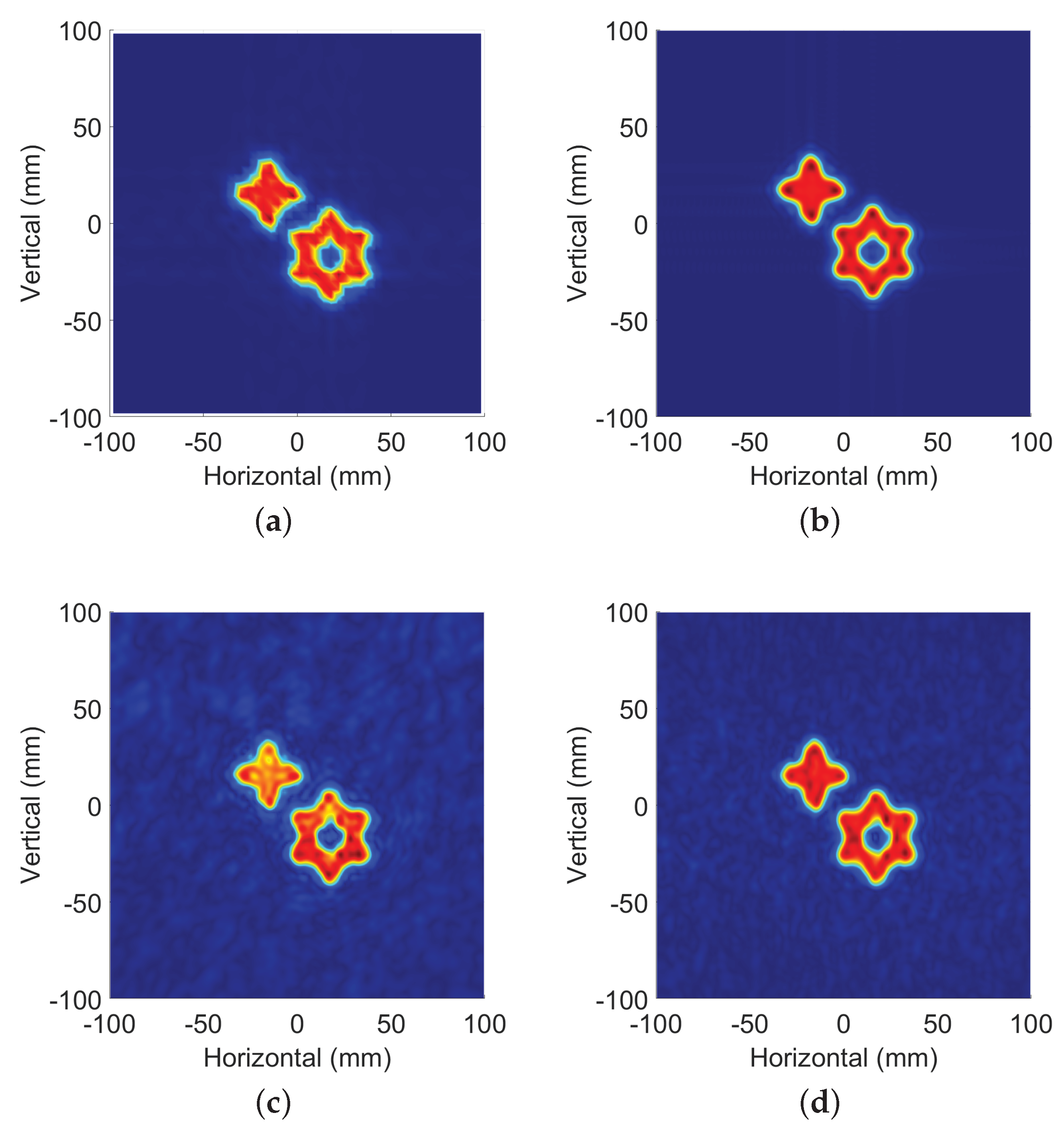
3.1. Simulation
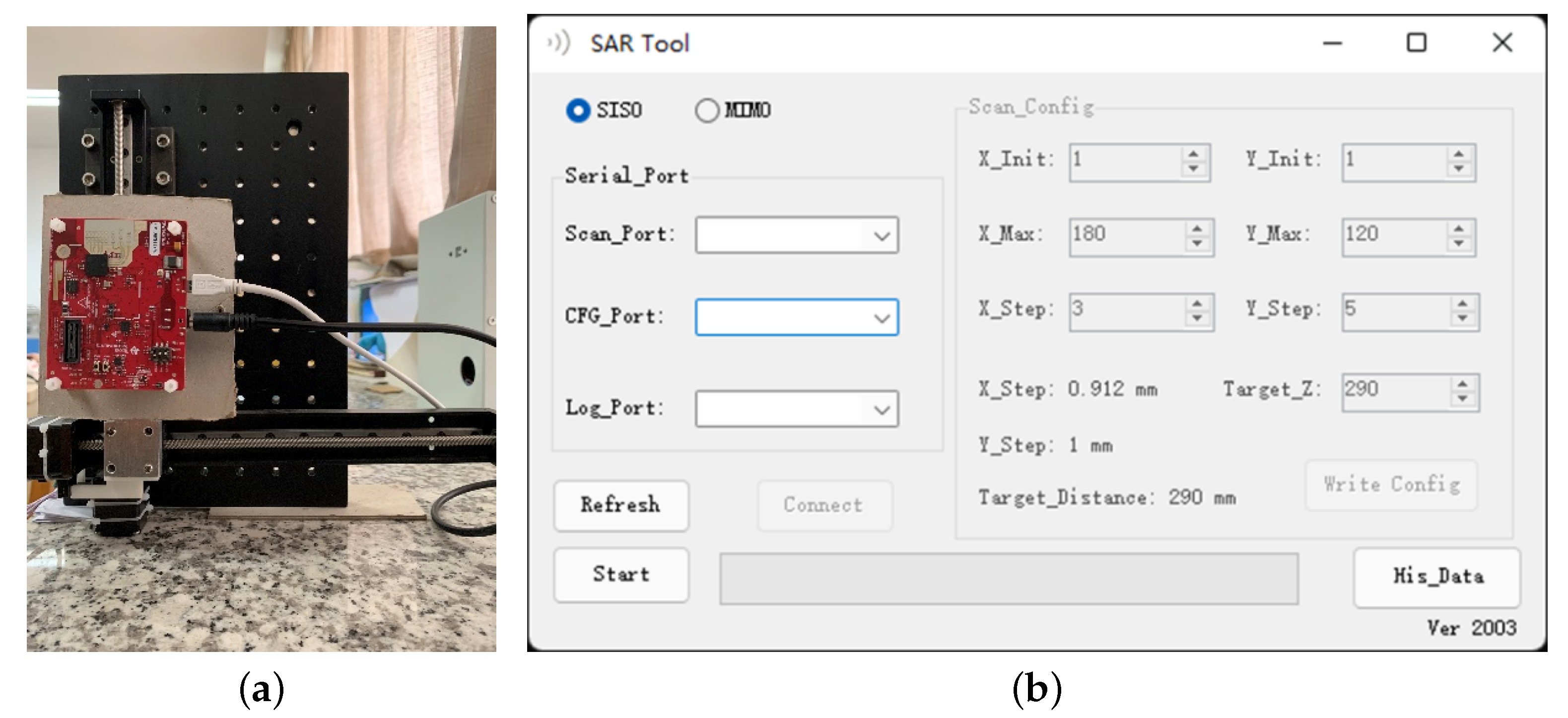
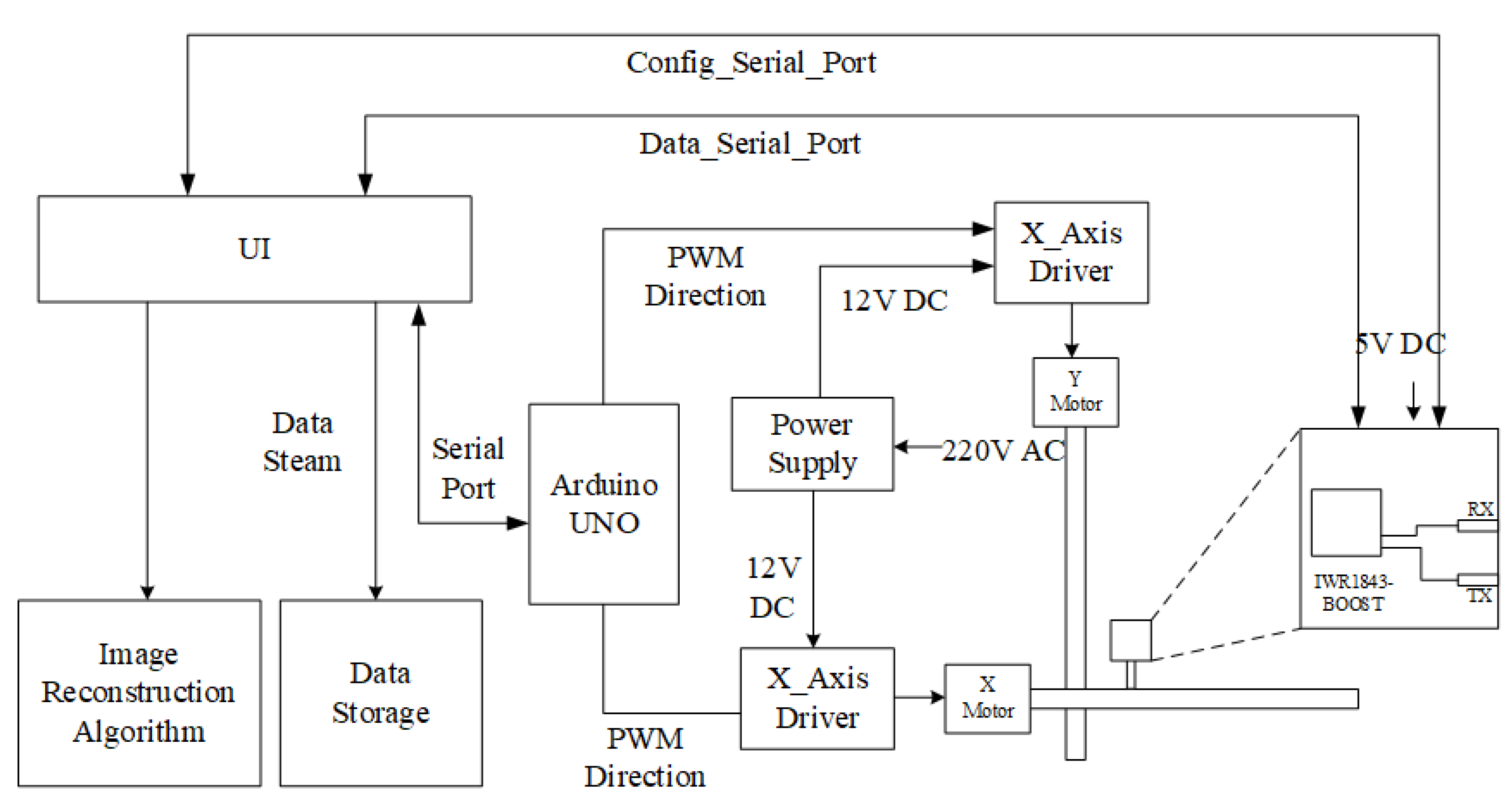
3.2. Near-Field SAR Testbed
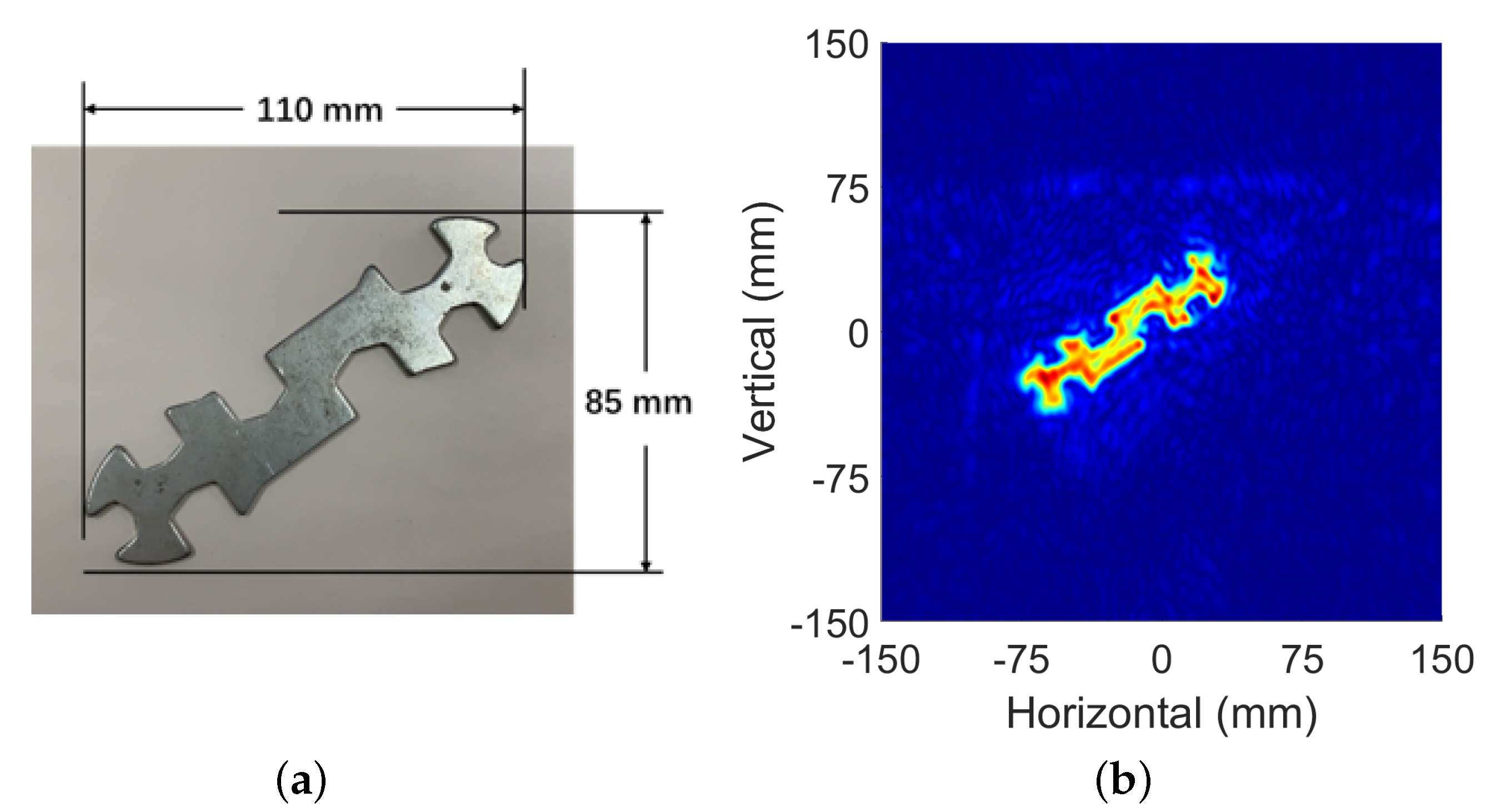
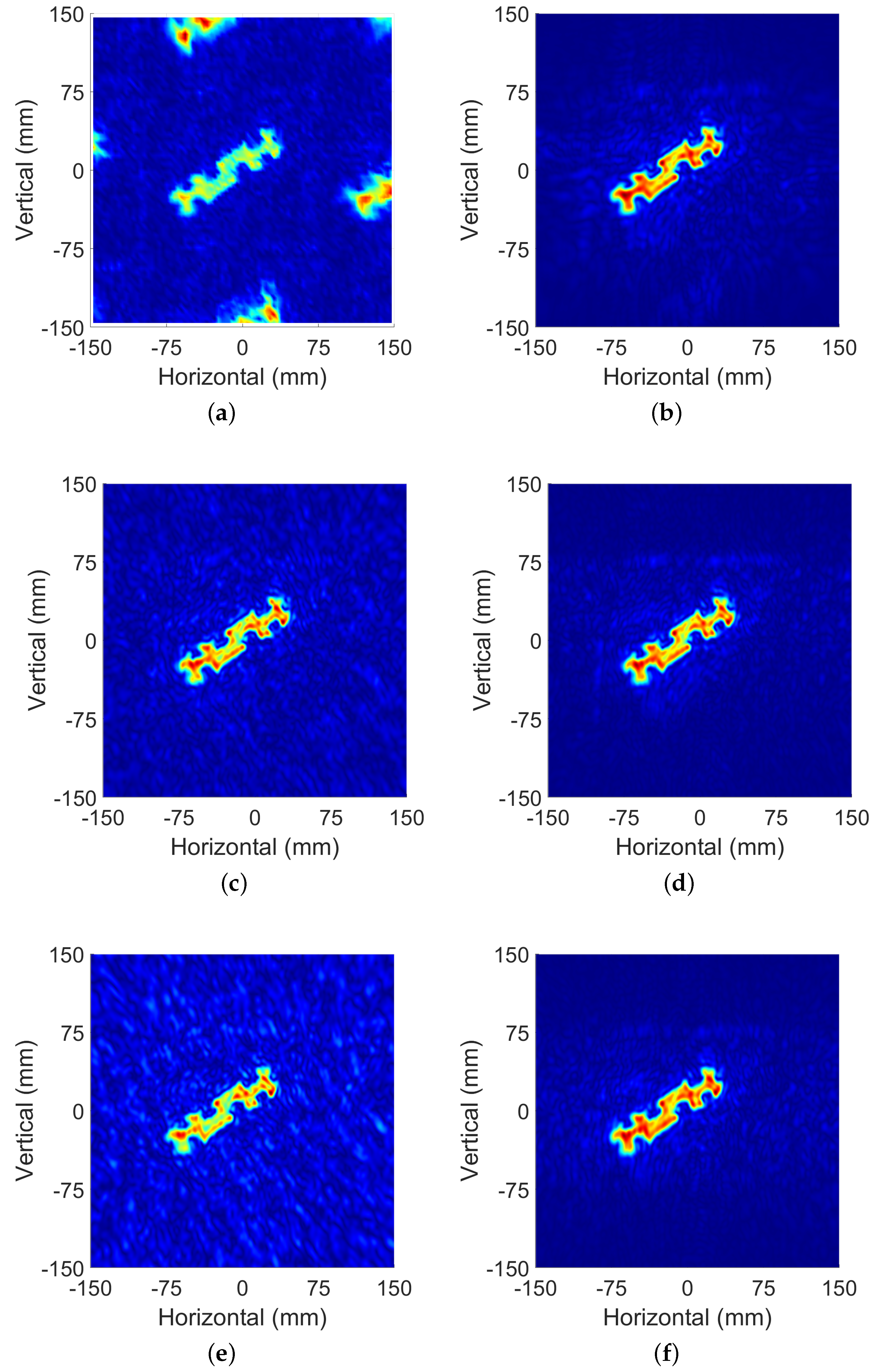
3.3. Measured Data and Reconstruction Results
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| SAR | Synthetic aperture radar |
| FMCW | Frequency modulated continuous wave |
| FFT | Fast Fourier transform |
| BP | Back projection algorithm |
| RMA | Range migration algorithm |
| MF | Match filter |
| SISO | Single-input single-output |
| MIMO | Multi-input multi-output |
| CS | Compressive sensing |
| MC | Matrix completion |
| NMSE | Normalized mean square error |
| SSIM | Structural similarity |
| PSNR | Peak signal-to-noise ratio |
| UI | User interface |
References
- Wang, Z.; Chang, T.; Cui, H.L. Review of active millimeter wave imaging techniques for personnel security screening. IEEE Access 2019, 7, 148336–148350. [Google Scholar] [CrossRef]
- Gao, Y.; Zoughi, R. Millimeter wave reflectometry and imaging for noninvasive diagnosis of skin burn injuries. IEEE Trans. Instrum. Meas. 2016, 66, 77–84. [Google Scholar] [CrossRef]
- Kharkovsky, S.; Case, J.T.; Abou-Khousa, M.A.; Zoughi, R.; Hepburn, F.L. Millimeter-wave detection of localized anomalies in the space shuttle external fuel tank insulating foam. IEEE Trans. Instrum. Meas. 2006, 55, 1250–1257. [Google Scholar] [CrossRef] [Green Version]
- Omer, A.E.; Safavi-Naeini, S.; Hughson, R.; Shaker, G. Blood glucose level monitoring using an FMCW millimeter-wave radar sensor. Remote Sens. 2020, 12, 385. [Google Scholar] [CrossRef] [Green Version]
- Dilli, R. Implications of mmWave Radiation on Human Health: State of the Art Threshold Levels. IEEE Access 2021, 9, 13009–13021. [Google Scholar] [CrossRef]
- CDesai, M.D.; Jenkins, W.K. Convolution backprojection image reconstruction for spotlight mode synthetic aperture radar. IEEE Trans. Image Process. 1992, 1, 505–517. [Google Scholar]
- Cho, Y.S.; Jung, H.K.; Cheon, C.; Chung, Y.S. Adaptive back-projection algorithm based on climb method for microwave imaging. IEEE Trans. Magn. 2008, 10, 142–149. [Google Scholar] [CrossRef]
- Zhu, R.; Zhou, J.; Jiang, G.; Fu, Q. Range migration algorithm for near-field MIMO-SAR imaging. IEEE Geosci. Remote Sens. Lett. 2017, 14, 2280–2284. [Google Scholar] [CrossRef]
- Zhuge, X.; Yarovoy, A.G. Three-dimensional near-field MIMO array imaging using range migration techniques. IEEE Trans. Image Process. 2012, 21, 3026–3033. [Google Scholar] [CrossRef]
- Tan, K.; Wu, S.; Liu, X.; Fang, G. Omega-K algorithm for near-field 3-D image reconstruction based on planar SIMO/MIMO array. IEEE Trans. Geosci. Remote Sens. 2018, 57, 2381–2394. [Google Scholar] [CrossRef]
- Chierchia, G.; El Gheche, M.; Scarpa, G.; Verdoliva, L. Multitemporal SAR image despeckling based on block-matching and collaborative filtering. IEEE Trans. Geosci. Remote Sens. 2017, 55, 5467–5480. [Google Scholar] [CrossRef]
- Zhu, R.; Zhou, J.; Cheng, B.; Fu, Q.; Jiang, G. Sequential frequency-domain imaging algorithm for near-field MIMO-SAR with arbitrary scanning paths. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 2967–2975. [Google Scholar] [CrossRef]
- Smith, J.W.; Torlak, M. Efficient 3-D Near-Field MIMO-SAR Imaging for Irregular Scanning Geometries. IEEE Access 2022, 10, 10283–10294. [Google Scholar] [CrossRef]
- Wang, Z.; Song, Y.; Li, Y. Ultra-Wideband Imaging via Frequency Diverse Array with Low Sampling Rate. Remote Sens. 2022, 14, 1271. [Google Scholar] [CrossRef]
- Abbasi, M.; Shayei, A.; Shabany, M.; Kavehvash, Z. Fast Fourier-based implementation of synthetic aperture radar algorithm for multistatic imaging system. IEEE Trans. Instrum. Meas. 2018, 68, 3339–3349. [Google Scholar] [CrossRef]
- Yanik, M.E.; Torlak, M. Near-field MIMO-SAR millimeter-wave imaging with sparsely sampled aperture data. IEEE Access 2019, 7, 31801–31819. [Google Scholar] [CrossRef]
- Hu, X.; Ma, C.; Lu, X.; Yeo, T.S. Compressive Sensing SAR Imaging Algorithm for LFMCW Systems. IEEE Trans. Geosci. Remote Sens. 2021, 59, 8486–8500. [Google Scholar] [CrossRef]
- Shi, Y.; Zhu, X.; Bamler, R. Nonlocal compressive sensing-based SAR tomography. IEEE Trans. Geosci. Remote Sens. 2019, 57, 3015–3024. [Google Scholar] [CrossRef] [Green Version]
- Candes, E.J.; Plan, Y. Matrix completion with noise. Proc. IEEE 2010, 98, 925–936. [Google Scholar] [CrossRef] [Green Version]
- Zhang, S.; Dong, G.; Kuang, G. Matrix completion for downward-looking 3-D SAR imaging with a random sparse linear array. IEEE Trans. Geosci. Remote Sens. 2017, 56, 1994–2006. [Google Scholar] [CrossRef]
- Ding, L.; Wu, S.; Li, P.; Zhu, Y. Millimeter-wave sparse imaging for concealed objects based on sparse range migration algorithm. IEEE Sensors J. 2019, 19, 6721–6728. [Google Scholar] [CrossRef]
- Lee, S.; Jung, Y.; Lee, M.; Lee, W. Compressive Sensing-Based SAR Image Reconstruction from Sparse Radar Sensor Data Acquisition in Automotive FMCW Radar System. Sensors 2021, 21, 7283. [Google Scholar] [CrossRef] [PubMed]
- Yang, D.; Liao, G.; Zhu, S.; Yang, X.; Zhang, X. SAR imaging with undersampled data via matrix completion. IEEE Geosci. Remote Sens. Lett. 2014, 11, 1539–1543. [Google Scholar] [CrossRef]
- Zhu, R.; Zhou, J.; Tang, L.; Kan, Y.; Fu, Q. Frequency-domain imaging algorithm for single-input–multiple-output array. IEEE Geosci. Remote Sens. Lett. 2016, 13, 1747–1751. [Google Scholar] [CrossRef]
- Yanik, M.E.; Wang, D.; Torlak, M. Development and demonstration of MIMO-SAR mmWave imaging testbeds. IEEE Access 2020, 8, 126019–126038. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Scan Parameters | 300 mm | |
| 200 mm | ||
| 200 mm | ||
| Step | 1 mm | |
| Radar Parameters | 77 GHz | |
| Frequency slope | HZ/s | |
| Bandwidth | 4 GHz |
| USR | 10% | 30% | 50% | 70% | 90% |
| Error in this paper | 54.34% | 8.7% | 5.34% | 1.14% | 0.43% |
| Error in ref. [22] | 68.05% | 10.01% | 6.34% | 2.3% | 1.61% |
| Error in ref. [23] | 73% | 6.5% | 5.9% | 5.4% | 4.7% |
| Large scan interval | Step | 2 mm | 3 mm | 4 mm | 5 mm | 6 mm |
| NMSE | 0.54% | 1.62% | 4.16% | 7.22% | 8.16% | |
| SSIM | 89.09% | 70.33% | 53.66% | 39.07% | 32.75% | |
| PSNR | 216.95 | 212.14 | 205.13 | 204.87 | 203.67 | |
| Random sparse data | USR | 80% | 60% | 40% | 30% | 20% |
| NMSE | 0.48% | 1.42% | 3.87% | 6.38% | 10.10% | |
| SSIM | 93.07% | 76.51% | 57.99% | 48.78% | 42.63% | |
| PSNR | 217.44 | 212.72 | 208.3676 | 206.2001 | 204.2016 |
| Large scan interval | Step | 2 × | 3 × | 4 × | 5 × | 6 × |
| NMSE | 2.68% | 3.44% | 5.73% | 8.34% | 13.06% | |
| SSIM | 80.22% | 64.76% | 47.76% | 36.70% | 26.6% | |
| PSNR | 169.34 | 168.51 | 165.09 | 164.38 | 163.94 | |
| Random sparse data | USR | 80% | 60% | 40% | 30% | 20% |
| NMSE | 0.69% | 2.11% | 5.16% | 8.01% | 12.47% | |
| SSIM | 98.07% | 90.2% | 69.53% | 52.08% | 33.97% | |
| PSNR | 176.21 | 171.82 | 168.14 | 166.04 | 164.24 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, C.; Xu, L.; Bai, X.; Chen, J. Near-Field High-Resolution SAR Imaging with Sparse Sampling Interval. Sensors 2022, 22, 5548. https://doi.org/10.3390/s22155548
Zhao C, Xu L, Bai X, Chen J. Near-Field High-Resolution SAR Imaging with Sparse Sampling Interval. Sensors. 2022; 22(15):5548. https://doi.org/10.3390/s22155548
Chicago/Turabian StyleZhao, Chengyi, Leijun Xu, Xue Bai, and Jianfeng Chen. 2022. "Near-Field High-Resolution SAR Imaging with Sparse Sampling Interval" Sensors 22, no. 15: 5548. https://doi.org/10.3390/s22155548
APA StyleZhao, C., Xu, L., Bai, X., & Chen, J. (2022). Near-Field High-Resolution SAR Imaging with Sparse Sampling Interval. Sensors, 22(15), 5548. https://doi.org/10.3390/s22155548