
A Novel Wireless Low-Cost Inclinometer Made from Combining the Measurements of Multiple MEMS Gyroscopes and Accelerometers

 ,
,  ,
,  ,
,  , and
, and
Abstract
:1. Introduction
- 1-
- Grimmelsman et al. [49] investigated the use of a low-cost accelerometer (ADXL335) with a sampling frequency of 100 HZ. Both the performance and functionality of this accelerometer was compared to those of standard instrument-grade accelerometers (PCB 393A03 and 3741E122G). From this study a difference of 16.2% between the acquired acceleration amplitude of the developed accelerometer and the commercial sensors was obtained.
- 2-
- Ozdagli et al. [50] developed a low-cost, efficient wireless intelligent sensor (LEWIS) with a sampling frequency of 100 Hz using a low-cost sensor MPU6050. This device was used in a number of laboratory experiments and its results were compared to those of a linear variable differential transformer (LDVT) sensor and a commercial accelerometer (PCB 3711B1110G).
- 3-
- Meng et al. [51] presented a low-cost acquisition system based on an accelerometer LSM9DS1 and a Raspberry Pi. A laboratory experiment was done to verify this accelerometer, and the results of the developed system were compared to those of a commercial accelerometer (PCB 356B18). The acceleration amplitude of this device was 6.07 percent different from the data of the commercial accelerometer.
- 4-
- Bedon et al. [52] developed a low-cost self-made accelerometer with a maximum sampling frequency of 256 Hz with post synchronization capability using the MEMS chipset KXR94-2050. The feasibility of the developed accelerometer was verified in several laboratory experiments and the acquired data were compared with those of a commercial accelerometer (PCB 356A16) in a field test.
- Yan et al. [62], who developed a low-cost wireless inclinometer with a sampling frequency of 20 Hz and reported resolution of 0.0025°, transmitting its data to acquisition equipment up to 2000 m away. This system is intended to monitor the swing of large-scale structures.
- Ruzza et al. [60], who introduce a low-cost inclinometer based on the Arduino technology and MEMS circuits with RMS error of between ±0.162 and ±0.304°.
- Andò et al. [63], who proposed a low-cost multi-sensor system to investigate the structural response of buildings. This system is based on Arduino technology and uses the XBEE interface for wireless communication.
- Hoang et al. [64], who developed a highly effective robust orientation system for inclinometers in static and dynamic cases. The reported RMS error of static and dynamic tests were 0.106 and 0.091 degrees, respectively.
- Woon Ha et al. [66], who proposed a low-cost wireless MEMS inclinometer with a measurement error of 0.04 degrees for an inclination of 0.44 degrees. This inclinometer is meant to estimate the ground movement.
2. Control System and the Proposed Inclinometer
2.1. Control System Description
2.2. Low-Cost Adaptable Reliable Angle-Meter (LARA) System
2.2.1. Hardware Architecture of LARA
2.2.2. Software Architecture of LARA
3. Statistical Representation of Combining Dynamic-Sensor Theory
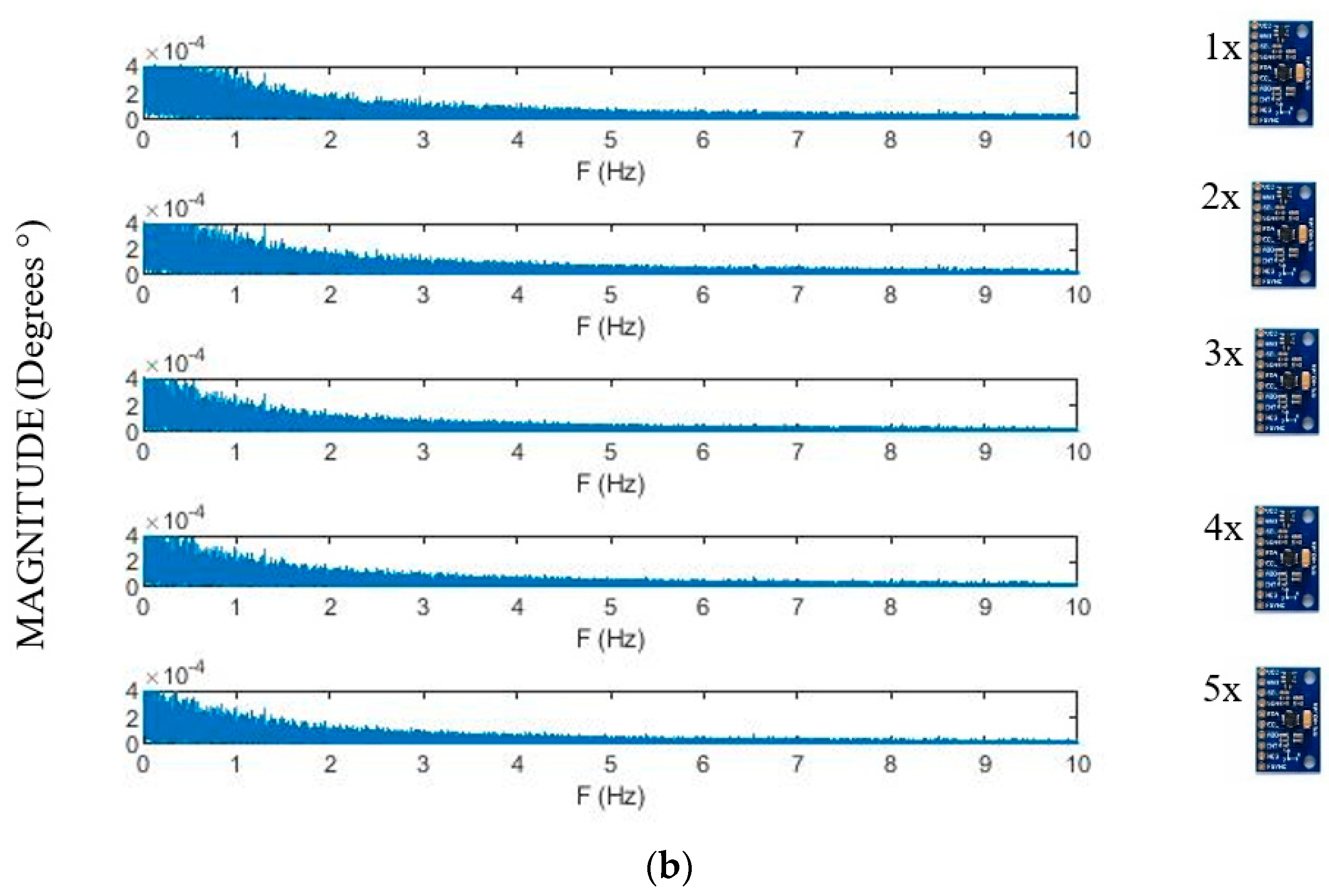
3.1. Noise Reduction of Inclinometers
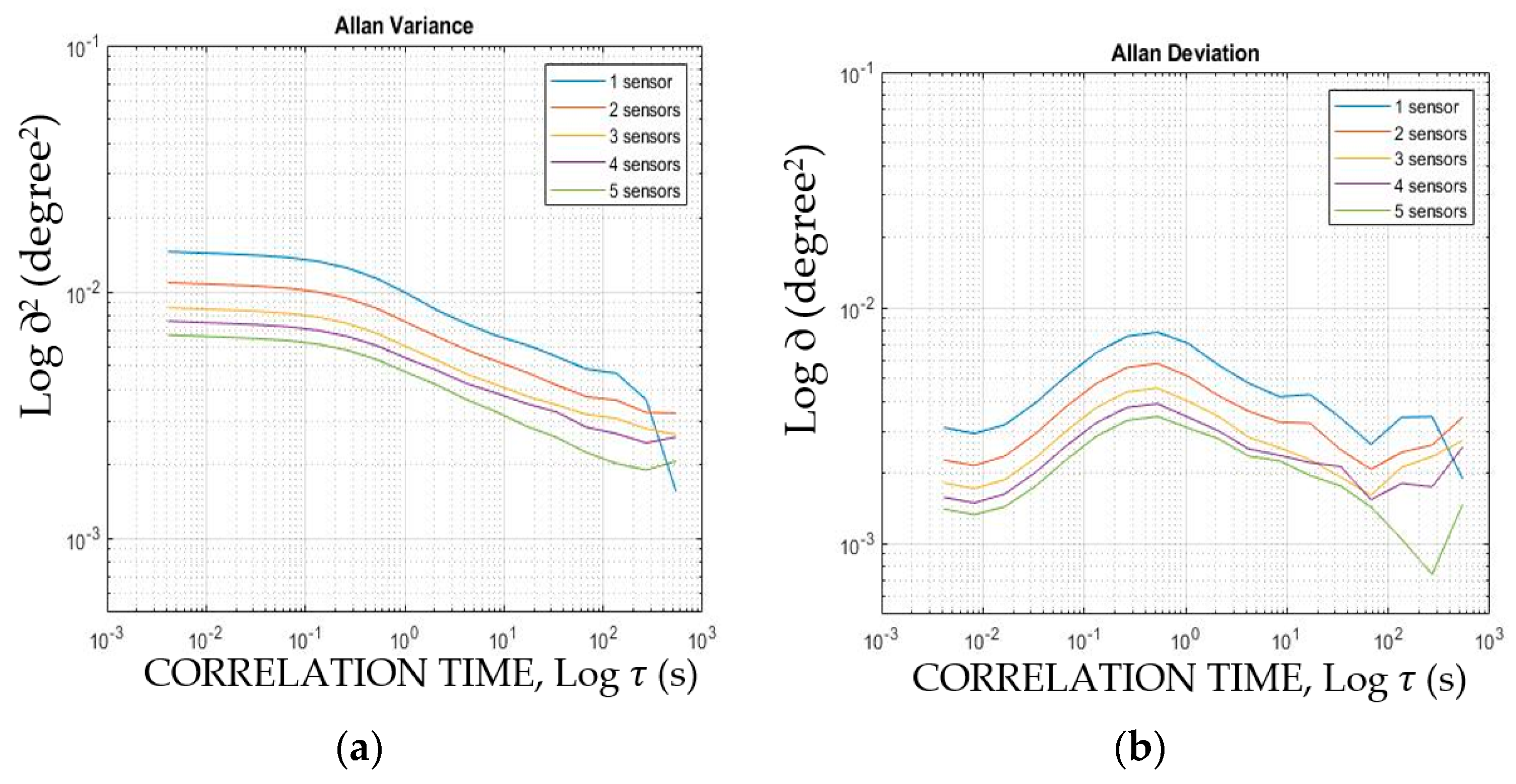
3.2. Study of Allan Variance
4. Laboratory Experiments
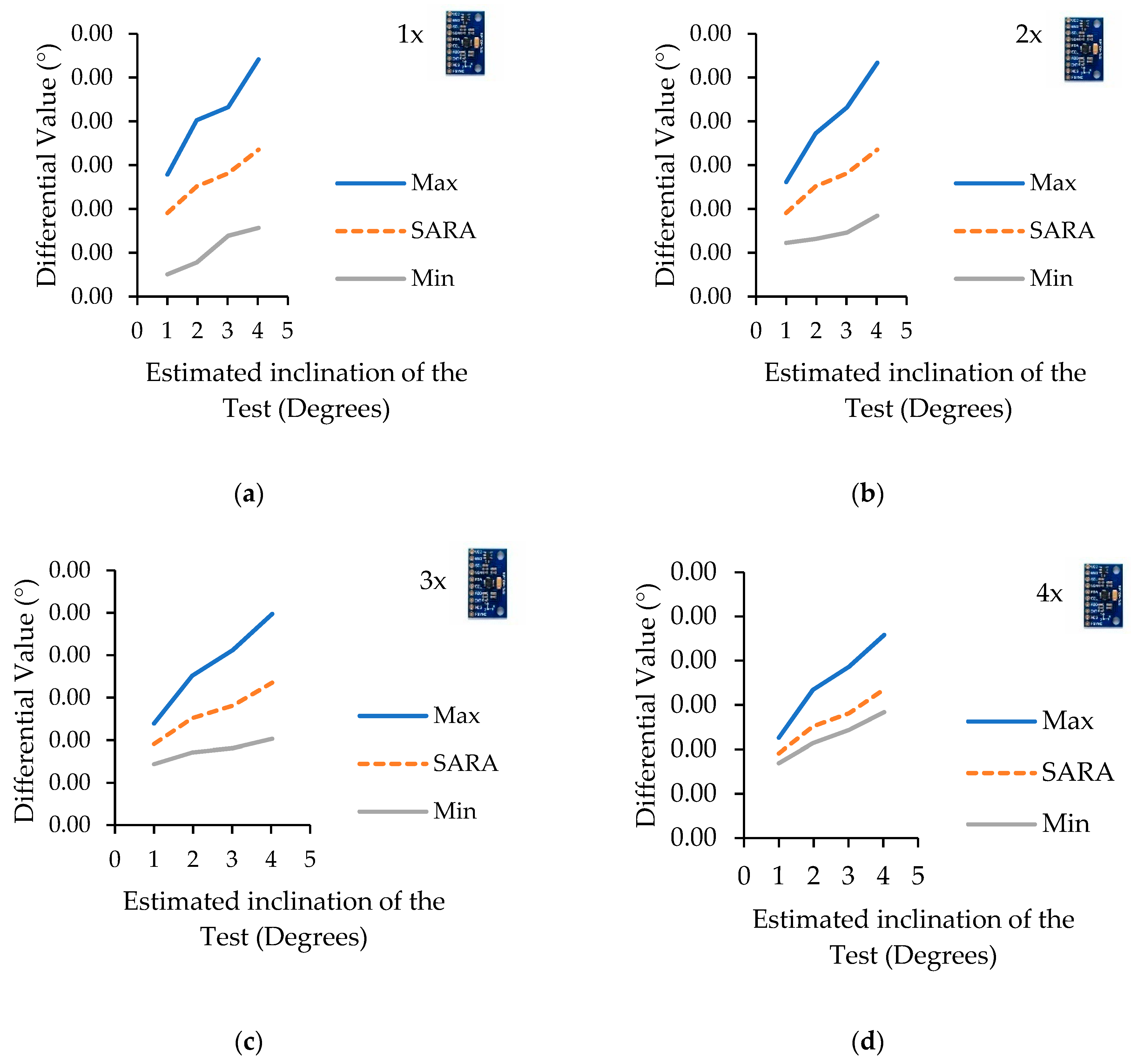
4.1. Accuracy Evaluation
4.2. Combinatory Analysis
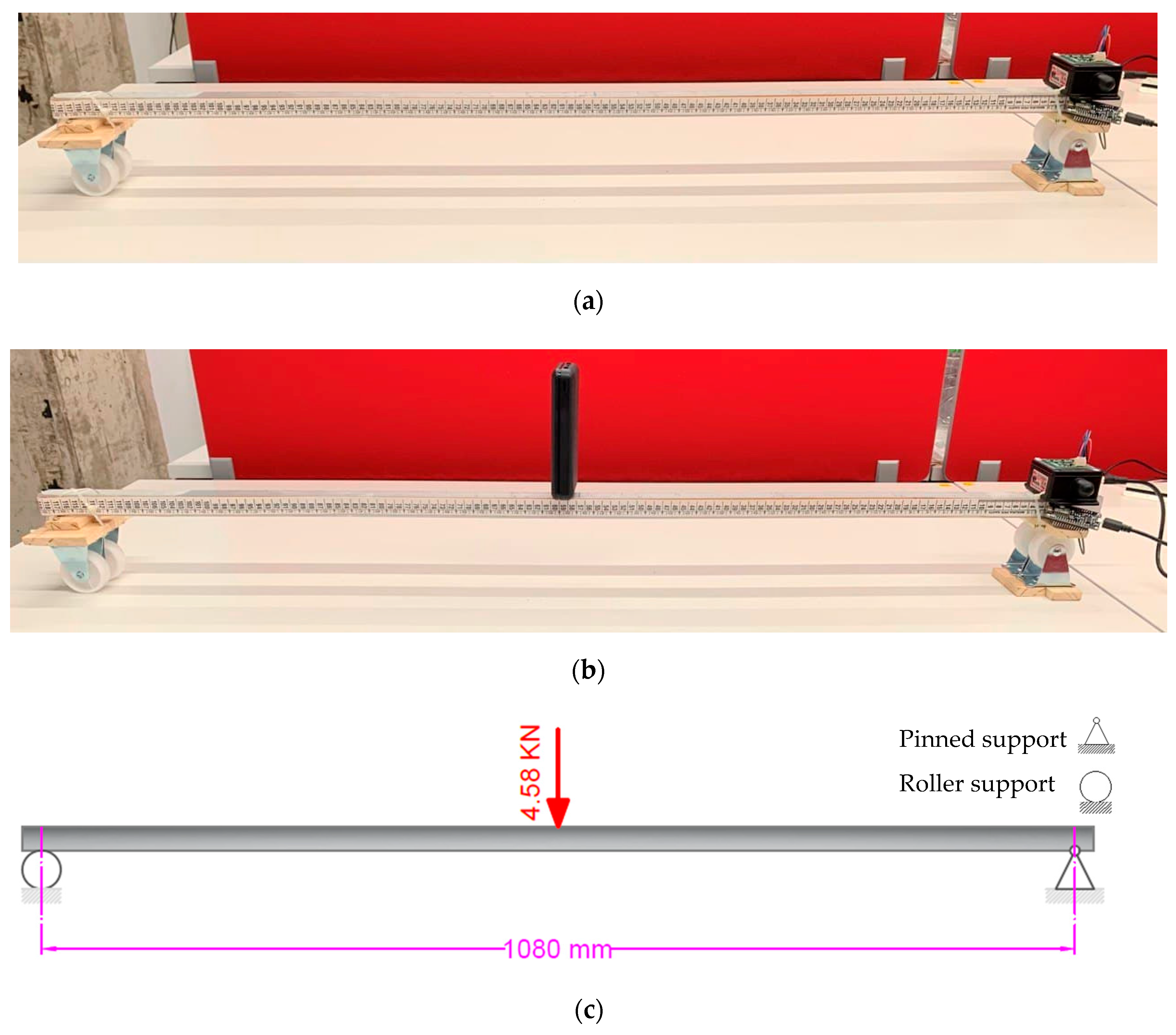
4.3. LARA Resolution and Accuracy Verification Using a Beam Model
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Kaloop, M.R.; Eldiasty, M.; Hu, J.W. Safety and reliability evaluations of bridge behaviors under ambient truck loads through structural health monitoring and identification model approaches. Measurement 2022, 187, 110234. [Google Scholar] [CrossRef]
- Komarizadehasl, S.; Mobaraki, B.; Ma, H.; Lozano-Galant, J.-A.; Turmo, J. Development of a Low-Cost System for the Accurate Measurement of Structural Vibrations. Sensors 2021, 21, 6191. [Google Scholar] [CrossRef] [PubMed]
- Komarizadehasl, S.; Mobaraki, B.; Ma, H.; Lozano-Galant, J.-A.; Turmo, J. Low-Cost Sensors Accuracy Study and Enhancement Strategy. Appl. Sci. 2022, 12, 3186. [Google Scholar] [CrossRef]
- Proske, D. Fatalities due to bridge collapse. Proc. Inst. Civ. Eng.-Bridge Eng. 2020, 173, 1–24. [Google Scholar] [CrossRef]
- Farré-Checa, J.; Komarizadehasl, S.; Ma, H.; Lozano-Galant, J.A.; Turmo, J. Direct simulation of the tensioning process of cable-stayed bridge cantilever construction. Autom. Constr. 2022, 137, 104197. [Google Scholar] [CrossRef]
- Straub, D.; Chatzi, E.; Bismut, E.; Courage, W.; Döhler, M.; Faber, M.H.; Köhler, J.; Lombaert, G.; Omenzetter, P.; Pozzi, M.; et al. Value of information: A roadmap to quantifying the benefit of structural health monitoring. In Proceedings of the 12th International Conference on Structural Safety & Reliability, Vienna, Austria, 6–10 August 2017; pp. 3018–3029. [Google Scholar]
- Zhou, Z.; Shao, S.; Deng, G.; Gao, Y.; Wang, S.; Chu, X. Vision-based modal parameter identification for bridges using a novel holographic visual sensor. Measurement 2021, 179, 109551. [Google Scholar] [CrossRef]
- Mantha, B.R.K.; Menassa, C.C.; Kamat, V.R. Robotic data collection and simulation for evaluation of building retrofit performance. Autom. Constr. 2018, 92, 88–102. [Google Scholar] [CrossRef]
- Fedorko, G.; Molnár, V.; Vasiľ, M.; Salai, R. Proposal of digital twin for testing and measuring of transport belts for pipe conveyors within the concept Industry 4.0. Measurement 2021, 174, 108978. [Google Scholar] [CrossRef]
- Vitiello, U.; Ciotta, V.; Salzano, A.; Asprone, D.; Manfredi, G.; Cosenza, E. BIM-based approach for the cost-optimization of seismic retrofit strategies on existing buildings. Autom. Constr. 2019, 98, 90–101. [Google Scholar] [CrossRef]
- Lei, J.; Lozano-Galant, J.A.; Xu, D.; Turmo, J. Structural system identification by measurement error-minimizing observability method. Struct. Control Health Monit. 2019, 26, e2425–e2444. [Google Scholar] [CrossRef]
- Lozano-Galant, J.A.; Nogal, M.; Turmo, J.; Castillo, E. Selection of measurement sets in static structural identification of bridges using observability trees. Comput. Concr. 2015, 15, 771–794. [Google Scholar] [CrossRef]
- Entezami, A.; Sarmadi, H.; Behkamal, B.; Mariani, S. Health Monitoring of Large-Scale Civil Structures: An Approach Based on Data Partitioning and Classical Multidimensional Scaling. Sensors 2021, 21, 1646. [Google Scholar] [CrossRef]
- Mobaraki, B.; Komarizadehasl, S.; Javier, F.; Pascual, C.; Lozano-Galant, A.; Soriano, R.P. A Novel Data Acquisition System for Obtaining Thermal Parameters of Building Envelopes. Buildings 2022, 12, 670. [Google Scholar] [CrossRef]
- Komarizadehasl, S.; Khanmohammadi, M. Novel plastic hinge modification factors for damaged RC shear walls with bending performance. Adv. Concr. Constr. 2021, 12, 355–365. [Google Scholar] [CrossRef]
- Nokhbatolfoghahai, A.; Navazi, H.M.; Groves, R.M. Evaluation of the sparse reconstruction and the delay-and-sum damage imaging methods for structural health monitoring under different environmental and operational conditions. Measurement 2021, 169, 108495. [Google Scholar] [CrossRef]
- Spitas, V.; Spitas, C.; Michelis, P. Real-time measurement of shear fatigue crack propagation at high-temperature using the potential drop technique. Measurement 2008, 41, 424–432. [Google Scholar] [CrossRef]
- Jian, X.; Xia, Y.; Lozano-Galant, J.A.; Sun, L. Traffic sensing methodology combining influence line theory and computer vision techniques for girder bridges. J. Sens. 2019, 2019, 3409525. [Google Scholar] [CrossRef] [Green Version]
- Ramli, J.; Coulson, J.; Martin, J.; Nagaratnam, B.; Poologanathan, K.; Cheung, W.M. Crack Detection and Localisation in Steel-Fibre-Reinforced Self-Compacting Concrete Using Triaxial Accelerometers. Sensors 2021, 21, 2044. [Google Scholar] [CrossRef]
- Zhang, L.; Cheng, X.; Wu, G.; Wang, T. Reference-free damage identification method for highway continuous girder bridges based on long-gauge fibre Bragg grating strain sensors. Measurement 2022, 195, 111064. [Google Scholar] [CrossRef]
- Lei, L.; Song, D.; Liu, Z.; Xu, X.; Zheng, Z. Displacement Identification by Computer Vision for Condition Monitoring of Rail Vehicle Bearings. Sensors 2021, 21, 2100. [Google Scholar] [CrossRef]
- Gaitan, M.; Geist, J. Calibration of triaxial accelerometers by constant rotation rate in the gravitational field. Measurement 2022, 189, 110528. [Google Scholar] [CrossRef]
- Antunes, P.; Varum, H.; André, P. Uniaxial fiber Bragg grating accelerometer system with temperature and cross axis insensitivity. Measurement 2011, 44, 55–59. [Google Scholar] [CrossRef]
- Hester, D.; Brownjohn, J.; Huseynov, F.; Obrien, E.; Gonzalez, A.; Casero, M. Identifying damage in a bridge by analysing rotation response to a moving load. Struct. Infrastruct. Eng. 2019, 16, 1050–1065. [Google Scholar] [CrossRef]
- Raghuwanshi, N.K.; Parey, A. Experimental measurement of mesh stiffness by laser displacement sensor technique. Measurement 2018, 128, 63–70. [Google Scholar] [CrossRef]
- Yao, X.; Xing, Z.; Zhang, Z.; Sheng, A. The online monitoring system of pantograph slider based on 2D laser displacement sensors. Measurement 2022, 194, 111083. [Google Scholar] [CrossRef]
- Park, H.; Son, S.; Choi, S.; Kim, Y. Wireless laser range finder system for vertical displacement monitoring of mega-trusses during construction. Sensors 2013, 13, 5796–5813. [Google Scholar] [CrossRef]
- Li, Y.; Wang, H.; Cai, W.; Li, S.; Zhang, Q. Stability monitoring of surrounding rock mass on a forked tunnel using both strain gauges and FBG sensors. Measurement 2020, 153, 107449. [Google Scholar] [CrossRef]
- Iriarte, X.; Aginaga, J.; Gainza, G.; Ros, J.; Bacaicoa, J. Optimal strain-gauge placement for mechanical load estimation in circular cross-section shafts. Measurement 2021, 174, 108938. [Google Scholar] [CrossRef]
- Copertaro, E. Assessment of resistive strain gauges measurement performances in experimental modal analysis and their application to the diagnostics of abrasive waterjet cutting machinery. Measurement 2022, 188, 110626. [Google Scholar] [CrossRef]
- Majumder, M.; Gangopadhyay, T.; Chakraborty, A.; Dasgupta, K.; Bhattacharya, D. Fibre Bragg gratings in structural health monitoring—Present status and applications. Sens. Actuators A Phys. 2008, 147, 150–164. [Google Scholar] [CrossRef]
- Huseynov, F.; Kim, C.; OBrien, E.J.; Brownjohn, J.M.W.; Hester, D.; Chang, K.C. Bridge damage detection using rotation measurements—Experimental validation. Mech. Syst. Signal Processing 2020, 135, 106380. [Google Scholar] [CrossRef]
- Ha, D.W.; Park, H.S.; Choi, S.W.; Kim, Y. A Wireless MEMS-Based Inclinometer Sensor Node for Structural Health Monitoring. Sensors 2013, 13, 16090–16104. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lei, X.; Xia, Y.; Komarizadehasl, S.; Sun, L. Condition level deteriorations modeling of RC beam bridges with U-Net convolutional neural networks. Structures 2022, 42, 333–342. [Google Scholar] [CrossRef]
- Glišić, B.; Posenato, D.; Inaudi, D.; Figini, A. Structural health monitoring method for curved concrete bridge box girders. In SPIE 6932, Sensors and Smart Structures Technologies for Civil, Mechanical, and Aerospace Systems; Tomizuka, M., Ed.; SPIE: Bellingham, DC, USA, 2008; Volume 6932, p. 693204. [Google Scholar]
- Zhou, Y.; Dongjian, Z.; Zhuoyan, C.; Yongtao, L. Research on a novel inclinometer based on distributed optical fiber strain and conjugate beam method. Measurement 2020, 153, 107404. [Google Scholar] [CrossRef]
- Bas, S.; Apaydin, N.M.; Ilki, A.; Catbas, F.N. Structural health monitoring system of the long-span bridges in Turkey. Struct. Infrastruct. Eng. 2017, 14, 425–444. [Google Scholar] [CrossRef]
- Ko, J.M.; Ni, Y.Q. Technology developments in structural health monitoring of large-scale bridges. Eng. Struct. 2005, 27, 1715–1725. [Google Scholar] [CrossRef]
- Pei, H.; Zhang, F.; Zhang, S. Development of a novel Hall element inclinometer for slope displacement monitoring. Measurement 2021, 181, 109636. [Google Scholar] [CrossRef]
- Haritos, N.; Chalko, T.J. Determination of abutment support conditions in an 80-year-old RC bridge. Eng. Mater. Sci. 1996, 2946, 312–323. [Google Scholar] [CrossRef]
- Hoult, N.A.; Fidler, P.R.A.; Hill, P.G.; Middleton, C.R. Long-Term Wireless Structural Health Monitoring of the Ferriby Road Bridge. J. Bridge Eng. 2010, 15, 153–159. [Google Scholar] [CrossRef] [Green Version]
- Stajano, F.; Hoult, N.; Wassell, I.; Bennett, P.; Middleton, C.; Soga, K. Smart bridges, smart tunnels: Transforming wireless sensor networks from research prototypes into robust engineering infrastructure. Ad. Hoc. Netw. 2010, 8, 872–888. [Google Scholar] [CrossRef] [Green Version]
- Hou, X.; Yang, X.; Huang, Q. Using Inclinometers to Measure Bridge Deflection. J. Bridge Eng. 2005, 10, 564–569. [Google Scholar] [CrossRef]
- Sousa, H.F.A.J.J. Bridge deflection evaluation using strain and rotation measurements. Smart Struct. Syst. 2013, 11, 365–386. [Google Scholar] [CrossRef]
- Helmi, K.; Taylor, T.; Zarafshan, A.; Ansari, F. Reference free method for real time monitoring of bridge deflections. Eng. Struct. 2015, 103, 116–124. [Google Scholar] [CrossRef] [Green Version]
- Robert-Nicoud, Y.; Raphael, B.; Burdet, O.; Smith, I.F.C. Model Identification of Bridges Using Measurement Data. Comput.-Aided Civ. Infrastruct. Eng. 2005, 20, 118–131. [Google Scholar] [CrossRef] [Green Version]
- Erdenebat, D.; Waldmann, D.; Scherbaum, F.; Teferle, N. The Deformation Area Difference (DAD) method for condition assessment of reinforced structures. Eng. Struct. 2018, 155, 315–329. [Google Scholar] [CrossRef]
- Alten, K.; Ralbovsky, M.; Vorwagner, A.; Toplitzer, H.; Wittmann, S. Evaluation of Different Monitoring Techniques during Damage Infliction on Structures. Procedia Eng. 2017, 199, 1840–1845. [Google Scholar] [CrossRef]
- Grimmelsman, K.A.; Zolghadri, N. Experimental evaluation of low-cost accelerometers for dynamic characterization of bridges. In Conference Proceedings of the Society for Experimental Mechanics Series; Springer New York LLC: New York, NY, USA, 2020; pp. 145–152. [Google Scholar]
- Ozdagli, A.I.; Liu, B.; Moreu, F. Low-cost, efficient wireless intelligent sensors (LEWIS) measuring real-time reference-free dynamic displacements. Mech. Syst. Signal Processing 2018, 107, 343–356. [Google Scholar] [CrossRef]
- Meng, Q.; Zhu, S. Developing iot sensing system for construction-induced vibration monitoring and impact assessment. Sensors 2020, 20, 6120. [Google Scholar] [CrossRef]
- Bedon, C.; Bergamo, E.; Izzi, M.; Noè, S. Prototyping and Validation of MEMS Accelerometers for Structural Health Monitoring—The Case Study of the Pietratagliata Cable-Stayed Bridge. J. Sens. Actuator Netw. 2018, 7, 30. [Google Scholar] [CrossRef] [Green Version]
- MEMS Gyroscope Provides Precision Inertial Sensing in Harsh, High Temperature Environments|Analog Devices. Available online: https://www.analog.com/en/technical-articles/mems-gyroscope-provides-precision-inertial-sensing.html (accessed on 16 October 2021).
- Hiller, T.; Pentek, Z.; Liewald, J.T.; Buhmann, A.; Roth, H. Origins and Mechanisms of Bias Instability Noise in a Three-Axis Mode-Matched MEMS Gyroscope. J. Microelectromech. Syst. 2019, 28, 586–596. [Google Scholar] [CrossRef]
- Ghasemi-Moghadam, S.; Homaeinezhad, M.R. Attitude determination by combining arrays of MEMS accelerometers, gyros, and magnetometers via quaternion-based complementary filter. Int. J. Numer. Model. Electron. Netw. Devices Fields 2018, 31, e2282. [Google Scholar] [CrossRef]
- Faulkner, K.; Brownjohn, J.M.W.; Wang, Y.; Huseynov, F. Tracking bridge tilt behaviour using sensor fusion techniques. J. Civ. Struct. Health Monit. 2020, 10, 543–555. [Google Scholar] [CrossRef]
- Jerath, K.; Brennan, S.; Lagoa, C. Bridging the gap between sensor noise modeling and sensor characterization. Measurement 2018, 116, 350–366. [Google Scholar] [CrossRef]
- Mumuni, F.; Mumuni, A. Adaptive Kalman filter for MEMS IMU data fusion using enhanced covariance scaling. Control Theory Technol. 2021, 19, 365–374. [Google Scholar] [CrossRef]
- Alfian, R.I.; Ma’Arif, A.; Sunardi, S. Noise Reduction in the Accelerometer and Gyroscope Sensor with the Kalman Filter Algorithm. J. Robot. Control 2021, 2, 180–189. [Google Scholar] [CrossRef]
- Ruzza, G.; Guerriero, L.; Revellino, P.; Guadagno, F.M. A Multi-Module Fixed Inclinometer for Continuous Monitoring of Landslides: Design, Development, and Laboratory Testing. Sensors 2020, 20, 3318. [Google Scholar] [CrossRef] [PubMed]
- Komarizadehasl, S.; Mobaraki, B.; Lozano-Galant, J.A.; Turmo, J. Detailed evaluation of low-cost ranging sensors for structural health monitoring applications. In Proceedings of the International Conference of Recent Trends in Geotechnical and Geo-Environmental Engineering and Education, RTCEE/RTGEE 2020, Bali, Indonesia, 15–17 July 2020; pp. 8–12. [Google Scholar]
- Yu, Y.; Ou, J.; Zhang, J.; Zhang, C.; Li, L. Development of wireless MEMS inclination sensor system for swing monitoring of large-scale hook structures. IEEE Trans. Ind. Electron. 2009, 56, 1072–1078. [Google Scholar] [CrossRef]
- Andò, B.; Baglio, S.; Pistorio, A. A low cost multi-sensor system for investigating the structural response of buildings. Ann. Geophys. 2018, 61, SE217. [Google Scholar] [CrossRef] [Green Version]
- Hoang, M.L.; Pietrosanto, A. A Robust Orientation System for Inclinometer with Full-Redundancy in Heavy Industry. IEEE Sens. J. 2021, 21, 5853–5860. [Google Scholar] [CrossRef]
- Khan, S.M.; Qaiser, N.; Hussain, M.M. An inclinometer using movable electrode in a parallel plate capacitive structure. AIP Adv. 2019, 9, 045118. [Google Scholar] [CrossRef] [Green Version]
- Ha, D.W.; Kim, J.M.; Kim, Y.; Park, H.S. Development and application of a wireless MEMS-based borehole inclinometer for automated measurement of ground movement. Autom. Constr. 2018, 87, 49–59. [Google Scholar] [CrossRef]
- Chowdhry, B.S.; Shah, A.A.; Uqaili, M.A.; Memon, T. Development of IOT Based Smart Instrumentation for the Real Time Structural Health Monitoring. Wirel. Pers. Commun. 2020, 113, 1641–1649. [Google Scholar] [CrossRef]
- Placa NodeMCU v3—ESP8266/CH340G Wifi BricoGeek CH340-V3|BricoGeek.com. Available online: https://tienda.bricogeek.com/wifi/1033-nodemcu-v3-wifi-esp8266-ch340.html?search_query=nodemcu&results=5 (accessed on 6 December 2021).
- Arduino Due—Modelo A000062 Arduino A000062|BricoGeek.com. Available online: https://tienda.bricogeek.com/arduino-original/476-arduino-due.html?search_query=arduino+due&results=9 (accessed on 6 December 2021).
- Zonzini, F.; Carbone, A.; Romano, F.; Zauli, M.; De Marchi, L. Machine Learning Meets Compressed Sensing in Vibration-Based Monitoring. Sensors 2022, 22, 2229. [Google Scholar] [CrossRef] [PubMed]
- Spectral Density|TI.com Video. Available online: https://training.ti.com/ti-precision-labs-op-amps-noise-spectral-density (accessed on 20 June 2022).
- BeanDevice® Wilow® User Manual. Available online: https://www.wireless-iot.beanair.com/files/UM-RF-07-ENG-Wilow-Wifi-Sensor.pdf (accessed on 2 November 2021).
- Bedon, C.; Noè, S. Uncoupled Wi-Fi Body CoM Acceleration for the Analysis of Lightweight Glass Slabs under Random Walks. J. Sens. Actuator Netw. 2022, 11, 10. [Google Scholar] [CrossRef]
- Knörig, A.; Wettach, R.; Cohen, J. Fritzing—A tool for advancing electronic prototyping for designers. In Proceedings of the 3rd International Conference on Tangible and Embedded Interaction, Cambridge, UK, 16–18 February 2009; pp. 351–358. [Google Scholar]
- Chiesa, G.; Di Vita, D.; Ghadirzadeh, A.; Muñoz Herrera, A.H.; Leon Rodriguez, J.C. A fuzzy-logic IoT lighting and shading control system for smart buildings. Autom. Constr. 2020, 120, 103397. [Google Scholar] [CrossRef]
- Yi, C.; Ma, J.; Guo, H.; Han, J.; Gao, H.; Jiang, F.; Yang, C. Estimating Three-Dimensional Body Orientation Based on an Improved Complementary Filter for Human Motion Tracking. Sensors 2018, 18, 3765. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Shen, X.; Yao, M.; Jia, W.; Yuan, D. Adaptive complementary filter using fuzzy logic and simultaneous perturbation stochastic approximation algorithm. Measurement 2012, 45, 1257–1265. [Google Scholar] [CrossRef]
- HW VSP3—Virtual Serial Port|HW-group.com. Available online: https://www.hw-group.com/software/hw-vsp3-virtual-serial-port (accessed on 31 October 2021).
- SerialPlot—Realtime Plotting Software|Hackaday.io. Available online: https://hackaday.io/project/5334-serialplot-realtime-plotting-software (accessed on 31 October 2021).
- Nirmal, K.; Sreejith, A.; Mathew, J.; Sarpotdar, M.; Suresh, A.; Prakash, A.; Safonova, M.; Murthy, J. Noise modeling and analysis of an IMU-based attitude sensor: Improvement of performance by filtering and sensor fusion. In Advances in Optical and Mechanical Technologies for Telescopes and Instrumentation II; SPIE: Bellingham, DC, USA, 2016; Volume 9912, pp. 2138–2147. [Google Scholar] [CrossRef] [Green Version]
- Schwenck, A.; Guenther, T.; Zimmermann, A. Characterization and benchmark of a novel capacitive and fluidic inclination sensor. Sensors 2021, 21, 8030. [Google Scholar] [CrossRef]
- Kwong, K. MEMS Accelerometer Specifications and Their Impact in Inertial Applications. Available online: http://www.eecg.utoronto.ca/~johns/nobots/theses/pdf/2017_keiming_kwong_masc.pdf (accessed on 7 March 2021).
- Hidalgo, J.; Poulakis, P.; Köhler, J.; Del-Cerro, J.; Barrientos, A. Improving Planetary Rover Attitude Estimation via MEMS Sensor Characterization. Sensors 2012, 12, 2219–2235. [Google Scholar] [CrossRef] [Green Version]
- McGeown, C.; Huseynov, F.; Hester, D.; McGetrick, P.; Obrien, E.J.; Pakrashi, V. Using measured rotation on a beam to detect changes in its structural condition. J. Struct. Integr. Maint. 2021, 6, 159–166. [Google Scholar] [CrossRef]
- Caruso, M.; Sabatini, A.M.; Laidig, D.; Seel, T.; Knaflitz, M.; Della Croce, U.; Cereatti, A. Analysis of the Accuracy of Ten Algorithms for Orientation Estimation Using Inertial and Magnetic Sensing under Optimal Conditions: One Size Does Not Fit All. Sensors 2021, 21, 2543. [Google Scholar] [CrossRef] [PubMed]
- Hibbeler, R.C. Structural Analysis, 10th ed.; Pearson: London, UK, 2017; ISBN 0134610679. [Google Scholar]
- Wireless Industrial IOT Inclinometer Sensor|Overview—BeanAir|Wireless IOT Sensors. Available online: https://www.beanair.com/wireless-iot-inclinometer-sensor-overview.html (accessed on 17 September 2021).





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | Measurement Range (Degrees) | Resolution (Degrees) | Sampling Rate (Hz) | Price (€) |
|---|---|---|---|---|
| ZEROTR-ONIC | ±0.5° | 100 × 10−5° | 10 | 3950 |
| JDI 200 | ±1.0° | 10 × 10−5° | 125 | 2250 |
| T935 | ±1.0° | 6 × 10−5° | 10 | 1696 |
| ACA2200 | ±0.5° | 10 × 10−5° | 20 | 710 |
| HI-INC | ±15.0° | 100 × 10−5° | 100 | 650 |
| ZCT-CX09 | ±15.0° | 100 × 10−5° | 8 | 350 |
| DNS | ±85.0° | 300 × 10−5° | 100 | 348 |
| N | HI-INC (Degrees) | LARA (Degrees) | Difference (Degrees) |
|---|---|---|---|
| 1 | 0.9996 | 0.9615 | 0.0382 |
| 2 | 1.9770 | 1.9267 | 0.0503 |
| 3 | 3.0180 | 2.9618 | 0.0563 |
| 4 | 4.0254 | 3.9583 | 0.0671 |
| Number of the Experiments | Hand Calculation Slope (Degrees) | LARA Difference (Degrees) | LARA (Degrees) | HI-INC Difference (Degrees) | HI-INC (Degrees) |
|---|---|---|---|---|---|
| 1 | 0.021372 | 0.001613 | 0.022985 | 0.002447 | 0.018925 |
| 2 | 0.021372 | 0.002316 | 0.023688 | 0.000853 | 0.020519 |
| 3 | 0.021372 | 0.001362 | 0.022734 | 0.005196 | 0.016176 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Komarizadehasl, S.; Komary, M.; Alahmad, A.; Lozano-Galant, J.A.; Ramos, G.; Turmo, J. A Novel Wireless Low-Cost Inclinometer Made from Combining the Measurements of Multiple MEMS Gyroscopes and Accelerometers. Sensors 2022, 22, 5605. https://doi.org/10.3390/s22155605
Komarizadehasl S, Komary M, Alahmad A, Lozano-Galant JA, Ramos G, Turmo J. A Novel Wireless Low-Cost Inclinometer Made from Combining the Measurements of Multiple MEMS Gyroscopes and Accelerometers. Sensors. 2022; 22(15):5605. https://doi.org/10.3390/s22155605
Chicago/Turabian StyleKomarizadehasl, Seyedmilad, Mahyad Komary, Ahmad Alahmad, José Antonio Lozano-Galant, Gonzalo Ramos, and Jose Turmo. 2022. "A Novel Wireless Low-Cost Inclinometer Made from Combining the Measurements of Multiple MEMS Gyroscopes and Accelerometers" Sensors 22, no. 15: 5605. https://doi.org/10.3390/s22155605
APA StyleKomarizadehasl, S., Komary, M., Alahmad, A., Lozano-Galant, J. A., Ramos, G., & Turmo, J. (2022). A Novel Wireless Low-Cost Inclinometer Made from Combining the Measurements of Multiple MEMS Gyroscopes and Accelerometers. Sensors, 22(15), 5605. https://doi.org/10.3390/s22155605