
Dual Band MEMS Directional Acoustic Sensor for Near Resonance Operation

Abstract
:1. Introduction
2. Sensor Design
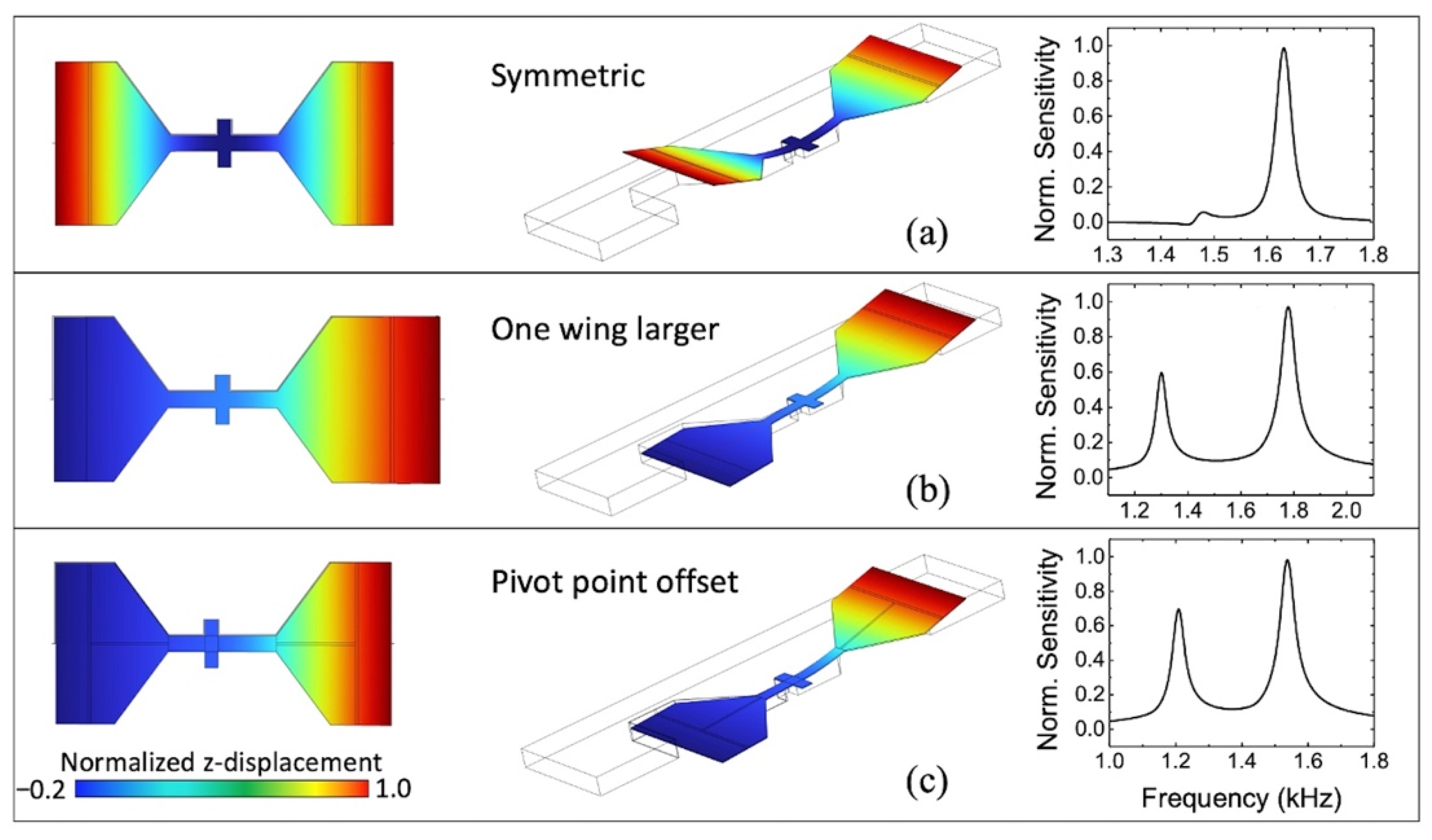
2.1. Modeling and Simulation
2.2. Fabrication
3. Results and Discussion
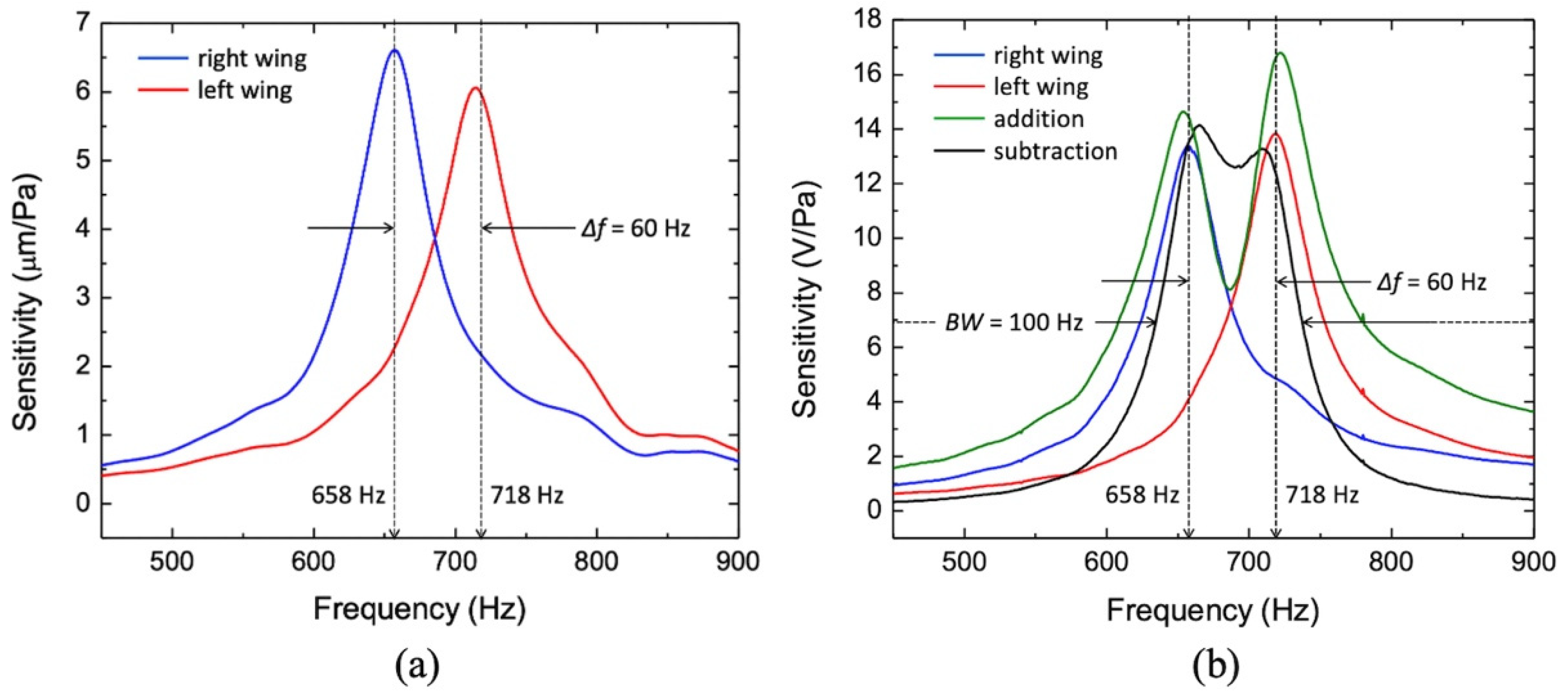
3.1. Sensitivity
3.2. Directionality
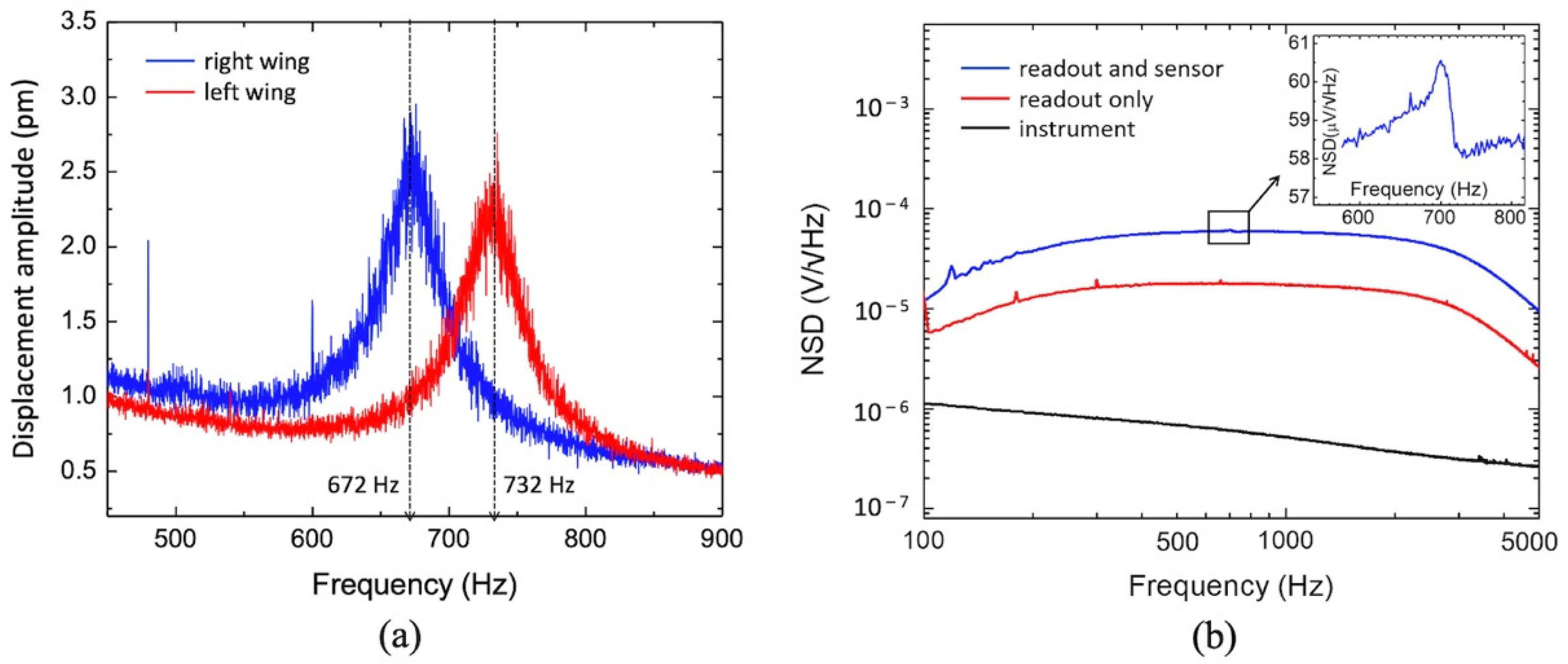
3.3. Noise and Signal-to-Noise Ratio
4. Methods
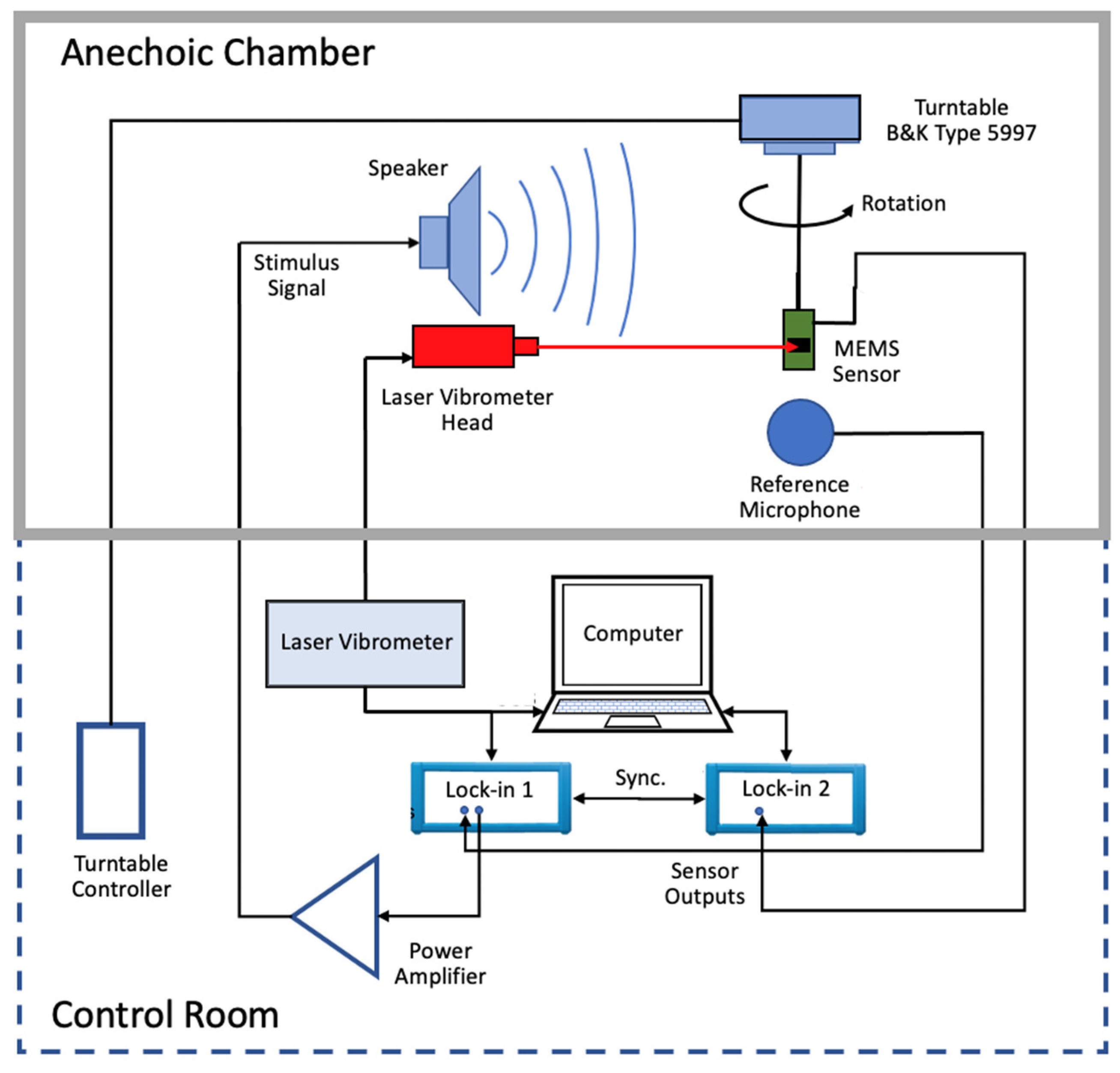
4.1. Mechanical Sensitivity Measurements
4.2. Electric Sensitivity Measurements
4.3. Noise Measurements
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Eargle, J. The Microphone Book: From Mono to Stereo to Surround—A Guide to Microphone Design and Application; CRC Press: Boca Raton, FL, USA, 2012; ISBN 1-136-11806-3. [Google Scholar]
- Vakhitov, S.Y. Problems of Theory and Designing for Directional Interference Microphones. In Proceedings of the Audio Engineering Society Conference: 21st International Conference: Architectural Acoustics and Sound Reinforcement, St. Petersburg, Russia, 1–3 June 2002. [Google Scholar]
- Belcher, E.O.; Lynn, D.C.; Dinh, H.Q.; Laughlin, T.J. Beamforming and Imaging with Acoustic Lenses in Small, High-Frequency Sonars. In Proceedings of the Oceans ’99, MTS/IEEE. Riding the Crest into the 21st Century, Conference and Exhibition, Conference Proceedings (IEEE Cat. No.99CH37008), Seattle, WA, USA, 13–16 September 1999; Volume 3, pp. 1495–1499. [Google Scholar]
- Song, K.; Kim, J.; Hur, S.; Kwak, J.-H.; Lee, S.-H.; Kim, T. Directional Reflective Surface Formed via Gradient-Impeding Acoustic Meta-Surfaces. Sci. Rep. 2016, 6, 1–10. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhao, L.; Yu, M. Flattened Structural Luneburg Lens for Broadband Beamforming. J. Acoust. Soc. Am. 2020, 148, EL82–EL87. [Google Scholar] [CrossRef]
- Tang, K.; Qiu, C.; Lu, J.; Ke, M.; Liu, Z. Focusing and Directional Beaming Effects of Airborne Sound through a Planar Lens with Zigzag Slits. J. Appl. Phys. 2015, 117, 024503. [Google Scholar] [CrossRef] [Green Version]
- Olson, H.F. Gradient Microphones. J. Acoust. Soc. Am. 1946, 17, 192–198. [Google Scholar] [CrossRef]
- Kuntzman, M.L.; Hewa-Kasakarage, N.N.; Rocha, A.; Kim, D.; Hall, N.A. Micromachined In-Plane Pressure-Gradient Piezoelectric Microphones. IEEE Sens. J. 2014, 15, 1347–1357. [Google Scholar] [CrossRef]
- Zhang, X. Benefits and Limitations of Common Directional Microphones in Real-World Sounds. Clin. Med. Res. 2018, 7, 103–118. [Google Scholar] [CrossRef] [Green Version]
- De Sena, E.; Hacihabiboglu, H.; Cvetkovic, Z. On the Design and Implementation of Higher Order Differential Microphones. IEEE Trans. Audio Speech Lang. Process. 2011, 20, 162–174. [Google Scholar] [CrossRef]
- Elko, G.W. Superdirectional Microphone Arrays. In Acoustic Signal Processing for Telecommunication; Springer: New York, NY, USA, 2000; pp. 181–237. [Google Scholar]
- Brandstein, M.; Ward, D. Microphone Arrays: Signal Processing Techniques and Applications; Springer Science & Business Media: Berlin, Germany, 2001; ISBN 3-540-41953-5. [Google Scholar]
- Benesty, J.; Jingdong, C. Study and Design of Differential Microphone Arrays; Springer Science & Business Media: Berlin, Germany, 2012; Volume 6, ISBN 3-642-33752-X. [Google Scholar]
- Merino-Martínez, R.; Sijtsma, P.; Snellen, M.; Ahlefeldt, T.; Antoni, J.; Bahr, C.J.; Blacodon, D.; Ernst, D.; Finez, A.; Funke, S. A Review of Acoustic Imaging Methods Using Phased Microphone Arrays. CEAS Aeronaut. J. 2019, 10, 197–230. [Google Scholar] [CrossRef] [Green Version]
- De Bree, H.-E.; Wind, J.W. The Acoustic Vector Sensor: A Versatile Battlefield Acoustics Sensor. SPIE 2011, 8047, 46–53. [Google Scholar]
- Wajid, M.; Kumar, A.; Bahl, R. Design and Analysis of Air Acoustic Vector-Sensor Configurations for Two-Dimensional Geometry. J. Acoust. Soc. Am. 2016, 139, 2815–2832. [Google Scholar] [CrossRef]
- Mantouka, A.; Felisberto, P.; Santos, P.; Zabel, F.; Saleiro, M.; Jesus, S.M.; Sebastião, L. Development and Testing of a Dual Accelerometer Vector Sensor for Auv Acoustic Surveys. Sensors 2017, 17, 1328. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ramamohan, K.N.; Comesaña, D.F.; Leus, G. Uniaxial Acoustic Vector Sensors for Direction-of-Arrival Estimation. J. Sound Vib. 2018, 437, 276–291. [Google Scholar] [CrossRef]
- Wajid, M.; Kumar, A.; Bahl, R. Direction Estimation and Tracking of Coherent Sources Using a Single Acoustic Vector Sensor. Arch. Acoust. 2020, 45, 209–219. [Google Scholar]
- Wang, W.; Zhang, Q.; Tan, W.; Shi, W.; Pang, F. Direction Finding via Acoustic Vector Sensor Array with Non-Orthogonal Factors. Digit. Signal Process. 2021, 108, 102910. [Google Scholar] [CrossRef]
- Stinco, P.; Tesei, A.; Dreo, R.; Micheli, M. Detection of Envelope Modulation and Direction of Arrival Estimation of Multiple Noise Sources with an Acoustic Vector Sensor. J. Acoust. Soc. Am. 2021, 149, 1596–1608. [Google Scholar] [CrossRef]
- Yang, L.; Zhu, Z.; Chang, W.; Meng, F.; Gao, C.; Hao, Y.; Yang, Z. A Compact Acoustic Particle Velocity Gradient Sensor Based on MEMS Hot-Wire Sensor Chips. In Proceedings of the 2021 21st International Conference on Solid-State Sensors, Actuators and Microsystems (Transducers), Orlando, FL, USA, 20–24 June 2021; pp. 50–53. [Google Scholar]
- Bernstein, J.; Miller, R.; Kelley, W.; Ward, P. Low-Noise MEMS Vibration Sensor for Geophysical Applications. J. Microelectromech. Syst. 1999, 8, 433–438. [Google Scholar] [CrossRef]
- Liu, H.J.; Yu, M.; Zhang, X.M. Biomimetic Optical Directional Microphone with Structurally Coupled Diaphragms. Appl. Phys. Lett. 2008, 93, 243902. [Google Scholar] [CrossRef]
- Miles, R.; Su, Q.; Cui, W.; Shetye, M.; Degertekin, F.; Bicen, B.; Garcia, C.; Jones, S.; Hall, N. A Low-Noise Differential Microphone Inspired by the Ears of the Parasitoid Fly Ormia Ochracea. J. Acoust. Soc. Am. 2009, 125, 2013–2026. [Google Scholar] [CrossRef] [Green Version]
- Kuntzman, M.L.; Garcia, C.T.; Onaran, A.G.; Avenson, B.; Kirk, K.D.; Hall, N.A. Performance and Modeling of a Fully Packaged Micromachined Optical Microphone. J. Microelectromech. Syst. 2011, 20, 828–833. [Google Scholar] [CrossRef]
- Lisiewski, A.; Liu, H.; Yu, M.; Currano, L.; Gee, D. Fly-Ear Inspired Micro-Sensor for Sound Source Localization in Two Dimensions. J. Acoust. Soc. Am. 2011, 129, EL166–EL171. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Liu, H.; Currano, L.; Gee, D.; Helms, T.; Yu, M. Understanding and Mimicking the Dual Optimality of the Fly Ear. Sci. Rep. 2013, 3, 1–6. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kuntzman, M.L.; Gloria Lee, J.; Hewa-Kasakarage, N.N.; Kim, D.; Hall, N.A. Micromachined Piezoelectric Microphones with In-Plane Directivity. Appl. Phys. Lett. 2013, 102, 054109. [Google Scholar] [CrossRef] [PubMed]
- Miles, R.N.; Cui, W.; Su, Q.T.; Homentcovschi, D. A MEMS Low-Noise Sound Pressure Gradient Microphone with Capacitive Sensing. J. Microelectromech. Syst. 2014, 24, 241–248. [Google Scholar] [CrossRef]
- Kuntzman, M.L.; Hall, N.A. Sound Source Localization Inspired by the Ears of the O Rmia Ochracea. Appl. Phys. Lett. 2014, 105, 033701. [Google Scholar] [CrossRef]
- Wilmott, D.; Alves, F.; Karunasiri, G. Bio-Inspired Miniature Direction Finding Acoustic Sensor. Sci. Rep. 2016, 6, 1–8. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ishfaque, A.; Kim, B. Fly Ormia Ochracea Inspired MEMS Directional Microphone: A Review. IEEE Sens. J. 2017, 18, 1778–1789. [Google Scholar] [CrossRef]
- Ishfaque, A.; Rahaman, A.; Kim, B. Bioinspired Low Noise Circular-Shaped MEMS Directional Microphone. J. Micro Nanolithogr. MEMS MOEMS 2019, 18, 010501. [Google Scholar] [CrossRef]
- Rabelo, R.C.; Alves, F.D.; Karunasiri, G. Electronic Phase Shift Measurement for the Determination of Acoustic Wave DOA Using Single MEMS Biomimetic Sensor. Sci. Rep. 2020, 10, 1–13. [Google Scholar] [CrossRef]
- Rahaman, A.; Park, C.H.; Kim, B. Design and Characterization of a MEMS Piezoelectric Acoustic Sensor with the Enhanced Signal-to-Noise Ratio. Sens. Actuators A Phys. 2020, 311, 112087. [Google Scholar] [CrossRef]
- Rahaman, A.; Kim, B. Sound Source Localization by Ormia Ochracea Inspired Low–Noise Piezoelectric MEMS Directional Microphone. Sci. Rep. 2020, 10, 1–10. [Google Scholar] [CrossRef] [PubMed]
- Rahaman, A.; Kim, B. Microscale Devices for Biomimetic Sound Source Localization: A Review. J. Microelectromech. Syst. 2021, 31, 9–18. [Google Scholar] [CrossRef]
- Miles, R.; Robert, D.; Hoy, R. Mechanically Coupled Ears for Directional Hearing in the Parasitoid Fly Ormia Ochracea. J. Acoust. Soc. Am. 1995, 98, 3059–3070. [Google Scholar] [CrossRef]
- Robert, D.; Miles, R.; Hoy, R. Tympanal Mechanics in the Parasitoid Fly Ormia Ochracea: Intertympanal Coupling during Mechanical Vibration. J. Comp. Physiol. A 1998, 183, 443–452. [Google Scholar] [CrossRef]
- Baumgartel, L.; Vafanejad, A.; Chen, S.-J.; Kim, E.S. Resonance-Enhanced Piezoelectric Microphone Array for Broadband or Prefiltered Acoustic Sensing. J. Microelectromech. Syst. 2012, 22, 107–114. [Google Scholar] [CrossRef]
- Shkel, A.A.; Baumgartel, L.; Kim, E.S. A Resonant Piezoelectric Microphone Array for Detection of Acoustic Signatures in Noisy Environments. In Proceedings of the 2015 28th IEEE International Conference on Micro Electro Mechanical Systems (MEMS), Estoril, Portugal, 18–22 January 2015; pp. 917–920. [Google Scholar]
- Liu, H.; Liu, S.; Shkel, A.A.; Kim, E.S. Active Noise Cancellation with MEMS Resonant Microphone Array. J. Microelectromech. Syst. 2020, 29, 839–845. [Google Scholar] [CrossRef] [PubMed]
- Touse, M.; Sinibaldi, J.; Karunasiri, G. MEMS Directional Sound Sensor with Simultaneous Detection of Two Frequency Bands. In Proceedings of the SENSORS, 2010 IEEE, Waikoloa, HI, USA, 1–4 November 2010; pp. 2422–2425. [Google Scholar]
- Zhang, Y.; Bauer, R.; Whitmer, W.M.; Jackson, J.C.; Windmill, J.F.; Uttamchandani, D. A MEMS Microphone Inspired by Ormia for Spatial Sound Detection. In Proceedings of the 2018 IEEE Micro Electro Mechanical Systems (MEMS), Belfast, UK, 21–25 January 2018; pp. 253–256. [Google Scholar]
- French, A. Vibrations and Waves; Norton: New York, NY, USA, 1971. [Google Scholar]
- Kang, S.; Hong, H.-K.; Rhee, C.-H.; Yoon, Y.; Kim, C.-H. Directional Sound Sensor with Consistent Directivity and Sensitivity in the Audible Range. J. Microelectromech. Syst. 2021, 30, 471–479. [Google Scholar] [CrossRef]
- Cowen, A.; Hames, G.; Monk, D.; Wilcenski, S.; Hardy, B. SOIMUMPs Design Handbook; Memscap Inc.: Durham, NC, USA, 2011; pp. 2002–2011. [Google Scholar]
- Shen, X.; Zhao, L.; Xu, J.; Yao, X. Mathematical Analysis and Micro-Spacing Implementation of Acoustic Sensor Based on Bio-Inspired Intermembrane Bridge Structure. Sensors 2021, 21, 3168. [Google Scholar] [CrossRef]
- Albahri, S. Design and Development of Second Order MEMS Sound Pressure Gradient Sensor; State University of New York at Binghamton: New York, NY, USA, 2011; ISBN 1-267-15776-3. [Google Scholar]
- Akcakaya, M.; Nehorai, A. Performance Analysis of the Ormia Ochracea’s Coupled Ears. J. Acoust. Soc. Am. 2008, 124, 2100–2105. [Google Scholar] [CrossRef] [Green Version]
- Downey, R.H.; Karunasiri, G. Reduced Residual Stress Curvature and Branched Comb Fingers Increase Sensitivity of MEMS Acoustic Sensor. J. Microelectromech. Syst. 2013, 23, 417–423. [Google Scholar] [CrossRef]
- Miller, D.C.; Boyce, B.L.; Dugger, M.T.; Buchheit, T.E.; Gall, K. Characteristics of a Commercially Available Silicon-on-Insulator MEMS Material. Sens. Actuators A Phys. 2007, 138, 130–144. [Google Scholar] [CrossRef]
- Dally, J.; Rilley, W. Experimental Stress Analysis. In Engineering Mechanics Series–1991, 3rd ed.; Mcgraw-Hill International: Tokyo, Japan.
- Chen, Z.; Guo, M.; Zhang, R.; Zhou, B.; Wei, Q. Measurement and Isolation of Thermal Stress in Silicon-on-Glass MEMS Structures. Sensors 2018, 18, 2603. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, R.; Shen, W.; Zhang, W.; Song, J.; Li, N.; Liu, M.; Zhang, G.; Xue, C.; Zhang, W. Design and Implementation of a Jellyfish Otolith-Inspired MEMS Vector Hydrophone for Low-Frequency Detection. Microsyst. Nanoeng. 2021, 7, 1–10. [Google Scholar] [CrossRef] [PubMed]
- Kinsler, L.E.; Frey, A.R.; Coppens, A.B.; Sanders, J.V. Fundamentals of Acoustics; John Wiley & Sons Inc.: New York, NY, USA, 2000. [Google Scholar]
- Gabrielson, T.B. Mechanical-Thermal Noise in Micromachined Acoustic and Vibration Sensors. IEEE Trans. Electron Devices 1993, 40, 903–909. [Google Scholar] [CrossRef] [Green Version]
- Je, C.H.; Lee, J.; Yang, W.S.; Kwon, J. A Surface Micromachined MEMS Capacitive Microphone with Back-Plate Supporting Pillars. In Proceedings of the SENSORS, 2013 IEEE, Baltimore, MD, USA, 3–6 November 2013; pp. 1–4. [Google Scholar]
- TDK InvenSense Ultra-Low Noise Microphone with Differential Output. Available online: http://3cfeqx1hf82y3xcoull08ihx-wpengine.netdna-ssl.com/wp-content/uploads/2020/07/DS-000139-ICS-40730-v1.1.pdf (accessed on 12 April 2022).
- TDK MEMS Microphone (Analog Output (Equilibrium)). Available online: https://www.mouser.com/datasheet/2/400/mems_microphone_commercial_mmic_en-2581147.pdf (accessed on 12 April 2022).
- CUI Devices MEMS Microphone. Available online: https://www.cuidevices.com/product/resource/cmm-2718ab-3815nc-tr.pdf (accessed on 12 April 2022).
- Knowles High SNR, High AOP Analog Bottom Port SISONIC Microphone. Available online: https://media.digikey.com/pdf/Data%20Sheets/Knowles%20Acoustics%20PDFs/SPM0687LR5H-1_DS.pdf (accessed on 13 April 2022).
- Infineon IP57 Dust and Water Resistant Analog XENSIVTM MEMS Microphone. Available online: https://www.infineon.com/dgdl/Infineon-IM73A135-DataSheet-v01_00-EN.pdf?fileId=8ac78c8c7f2a768a017fadec36b84500 (accessed on 13 April 2022).




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Microphones | SNR Frequency Range (Hz) | Sensitivity (dBV/Pa at 1 kHz) | SNR for Full BW (dBA) | SNR for 120 Hz BW (dB) |
|---|---|---|---|---|
| Two-wing Sensor | 625–745 | 22 (at 690 Hz) | 92 | 91 |
| CUI devices [62] | 20–10,000 | −37 | 62 | 82 |
| IvenSense [60] | 25–20,000 | −36 | 74 | 83 |
| Knowles [63] | 13–13,000 | −34 | 70 | 85 |
| TDK [61] | 80–20,000 | −38 | 66 | 81 |
| Infineon [64] | 80–20,000 | −38 | 73 | 81 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alves, F.; Rabelo, R.; Karunasiri, G. Dual Band MEMS Directional Acoustic Sensor for Near Resonance Operation. Sensors 2022, 22, 5635. https://doi.org/10.3390/s22155635
Alves F, Rabelo R, Karunasiri G. Dual Band MEMS Directional Acoustic Sensor for Near Resonance Operation. Sensors. 2022; 22(15):5635. https://doi.org/10.3390/s22155635
Chicago/Turabian StyleAlves, Fabio, Renato Rabelo, and Gamani Karunasiri. 2022. "Dual Band MEMS Directional Acoustic Sensor for Near Resonance Operation" Sensors 22, no. 15: 5635. https://doi.org/10.3390/s22155635
APA StyleAlves, F., Rabelo, R., & Karunasiri, G. (2022). Dual Band MEMS Directional Acoustic Sensor for Near Resonance Operation. Sensors, 22(15), 5635. https://doi.org/10.3390/s22155635