
Resource Mapping Allocation Scheme in 6G Satellite Twin Network


Abstract
:1. Introduction
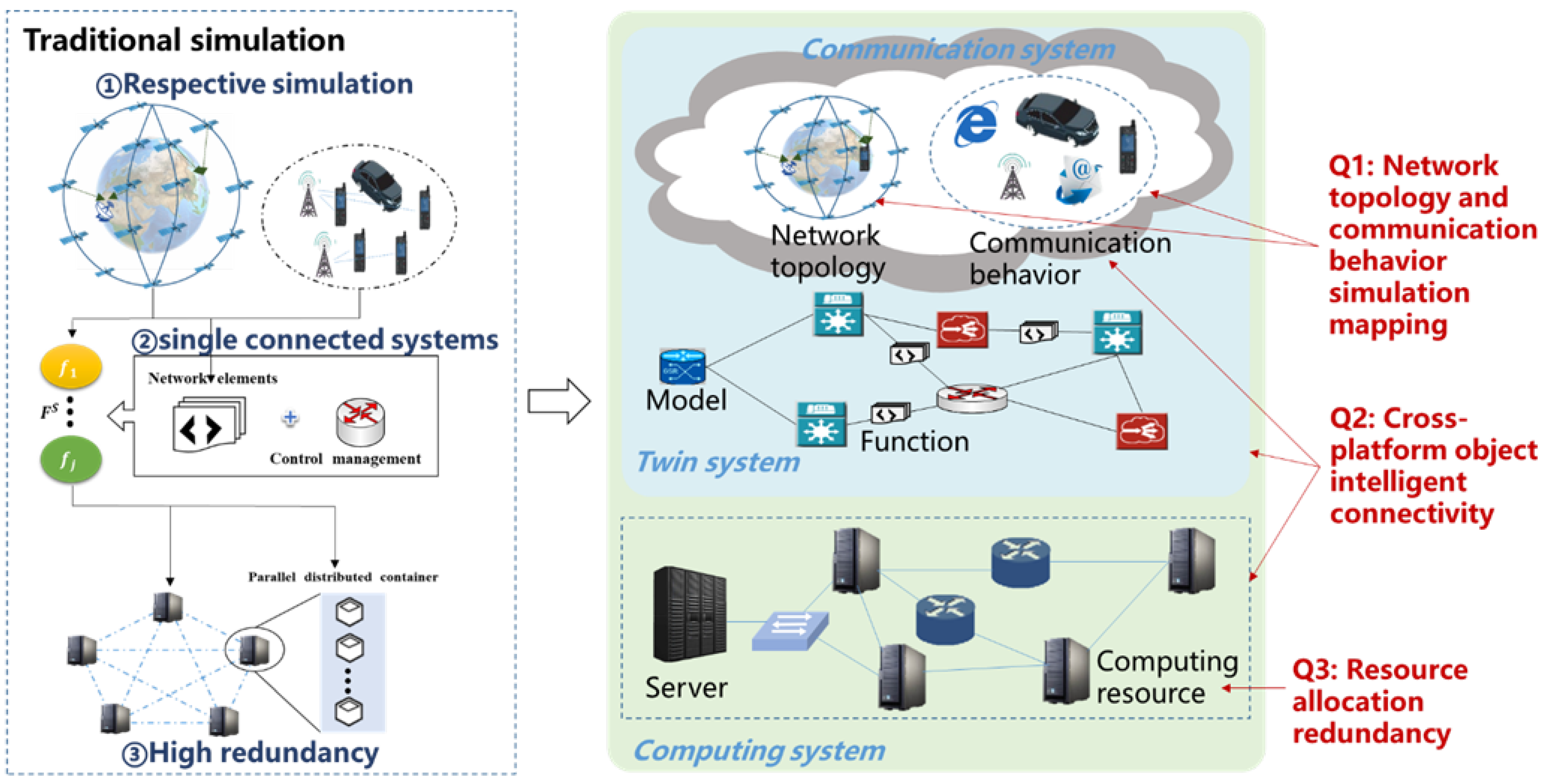
- Deterministic network geometric topology and fuzzy random communication behavior are difficult to map synergistically: 6G satellite network simulation needs to realistically portray the network topology and node communication behavior under the rapid change of space and time of massive dynamic network nodes. The network topology is deterministic and discrete. The communication behavior is random and continuous. It is a great challenge for collaborative high-fidelity simulation of network topology and communication behaviors.
- The communication network simulation based on computational functions has the problem that cross-platform and cross-object connectivity is isolated: The communication system, the twin system, and the computing system are completely different research objects in terms of function and logic. The intelligent management of the 6G network needs to realize the penetration of communication, twin, and computing. However, it is difficult to transparently sense the network state.
- The redundancy of resource allocation of the communication–twin–computing integration network is high: The communication–twin–computing integration network needs to use computing, interaction, storage, and other functions. The implementations of communication, twin, and computing have a large redundancy. There is a major challenge to extract the common functional requirements of communication, twin, and computing in computing, interaction, and storage.
- For the first time, the integrated relationships among the communication system, the twin system, and the computing system are theoretically analyzed and modeled. For the factor association analysis problem across systems, across dimensions, and across topologies, a hypergraph hierarchical nested kriging model that enables heterogeneous topological connection is introduced for the first time. A hierarchical unified feature description method is realized.
- In the communication–twin–computing integration network model, the basis function matrix of the local flexible connection of the global network is established. The connection optimization of huge heterogeneous systems is realized, which provides a supportive way to realize the cross-dimensional collaboration of heterogeneous systems.
- For the first time, a theoretical analysis method that can achieve joint objective optimization of complex heterogeneous systems is proposed. The common requirements of computing, storage, and interaction are also considered to achieve a multi-objective coordinate between function utilization, load balancing, and cost for heterogeneous systems. A cross-platform network simulation architecture with function isolation is proposed for the first time and the effectiveness of the algorithm is verified through experiments.
2. Related Work
3. System Model of 6G Satellite Twin Network
3.1. A Hierarchical Unified Feature Description Method
- (1)
- and ;
- (2)
- ;
- (3)
- There are , (see Appendix A), and .Then, .
3.2. Correlation between Domains within the Network Simulation Space
3.3. Function–Resource Mapping Model
4. System Optimization Scheme Based on A Multi-Constraint Multi-Objective Genetic Algorithm
4.1. Problem Formulation
- (1)
- Function utilization
- (2)
- Load balancing
- (3)
- Total cost
4.2. The Multi-Constraint Multi-Objective Genetic Algorithm
5. Serverless-Based Decentralized Simulation Development Model
5.1. The Three-Dimensional Hierarchical Simulation Framework
5.2. The Decentralized Adaptive Development Model
6. Results and Discussions
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
Appendix B
References
- Jao, C.K.; Wang, C.Y.; Yeh, T.Y.; Tsai, C.C.; Lo, L.C.; Chen, J.H.; Pao, W.C.; Sheen, W. WiSE: A System-Level Simulator for 5G Mobile Networks. IEEE Wirel. Commun. 2018, 25, 4–7. [Google Scholar] [CrossRef]
- Lee, J.; Han, M.; Rim, M.; Kang, C.G. 5G K-SimSys for Open/Modular/Flexible System-level Simulation: Overview and Its Application to Evaluation of 5G Massive MIMO. IEEE Access 2021, 1, 99. [Google Scholar] [CrossRef]
- Pratschner, S.; Müller, M.K.; Ademaj, F.; Nabavi, A.; Tahir, B.; Schwarz, S.; Rupp, M. Verification of the Vienna 5G link and system level simulators and their interaction. In Proceedings of the 2019 16th IEEE Annual Consumer Communications & Networking Conference (CCNC), Las Vegas, NV, USA, 11–14 January 2019; pp. 1–8. [Google Scholar]
- Series, M. Guidelines for evaluation of radio interface technologies for IMT-2020. Report ITU, 2017: 2412-0. Available online: https://www.itu.int/pub/R-REP-M.2412-2017 (accessed on 28 July 2022).
- OPNET Technologies. Available online: https://opnetprojects.com/ (accessed on 28 July 2022).
- Puttonen, J.; Kurjenniemi, J. Satellite Network Simulator 3 (SNS3). In Proceedings of the Workshop on Simulation for European Space Programmes, Noordwijk, The Netherlands, 24 March 2015; Volume 24, p. 26. [Google Scholar]
- Yang, L.Y.; Han, S.S.; Wang, X.; Li, Y.K.; Wang, F.Y. Computational Experiment Platforms for Networks: The State of the Art and Prospect. Zidonghua Xuebao/Acta Autom. Sin. 2019, 45, 1637–1654. [Google Scholar]
- Li, J.; Xue, K.; Wei, D.S.L.; Liu, J.; Zhang, Y. Energy Efficiency and Traffic Offloading Optimization in Integrated Satellite/Terrestrial Radio Access Networks. IEEE Trans. Wirel. Commun. 2020, 19, 2367–2381. [Google Scholar] [CrossRef]
- Systems Tool Kit (STK)―AGI. Available online: https://www.agi.com/products/stk/ (accessed on 28 July 2022).
- General Mission Analysis Tool (GMAT)―NASA―GSFC Open Source Software. Available online: https://opensource.gsfc.nasa.gov/projects/GMAT/ (accessed on 28 July 2022).
- Available online: https://ww2.mathworks.cn/help/satcom/ref/satellitescenario.html (accessed on 28 July 2022).
- Qi, J.; Li, Z.; Liu, G. Research on coverage and link of multi-layer Satellite Network based on STK. In Proceedings of the 2015 10th International Conference on Communications and Networking in China (ChinaCom), Shanghai, China, 15–17 August 2015; pp. 410–415. [Google Scholar] [CrossRef]
- Zhang, S.; Chen, Z.; Sun, W.; Xiao, X.; Ke, Y. Study On The Connection Rate Of LEO Communication Satellite. In Proceedings of the 2021 IEEE 21st International Conference on Software Quality, Reliability and Security Companion (QRS-C), Hainan, China, 6–10 December 2021; pp. 610–614. [Google Scholar] [CrossRef]
- Huanhuan, L.; Tao, S.; Hengchi, L.; Yongxin, F. Design and Implementation of Software Simulation for Air-Ground Data Link Communication. In Proceedings of the 2015 8th International Symposium on Computational Intelligence and Design (ISCID), Hangzhou, China, 12–13 December 2015; pp. 379–382. [Google Scholar] [CrossRef]
- Afonso, F.; Jerome, G.; Paolo, P. Topological Design, Routing and Hand-Over in Satellite Networks. In Handbook of Wireless Networks and Mobile Computing; John Wiley and Sons, Ltd.: Hoboken, NJ, USA, 2002; pp. 473–507. [Google Scholar]
- Bhuyan, B.; Sarma, H.D.; Sarma, N. A Survey on Middleware for Wireless Sensor Networks. Eurasip J. Wirel. Commun. Netw. 2014, 4, 7–17. [Google Scholar]
- Al-Roubaiey, A.A.; Sheltami, T.R.; Mahmoud, A.S.H.; Salah, K. Reliable Middleware for Wireless Sensor-Actuator Networks. IEEE Access 2019, 7, 14099–14111. [Google Scholar] [CrossRef]
- Guessoum, Z. Adaptive agents and multiagent systems. IEEE Distrib. Syst. Online 2004, 5, 1–4. [Google Scholar] [CrossRef]
- Lewis, F.L.; Cui, B.; Ma, T.; Song, Y.; Zhao, C. Heterogeneous Multi-Agent Systems: Reduced-Order Synchronization and Geometry. IEEE Trans. Autom. Control 2015, 61, 1391–1396. [Google Scholar] [CrossRef]
- Kumari, G.P.; Kandan, B.; Mishra, A.K. Experience Sharing on SOA Based Heterogeneous Systems Integration. In Proceedings of the 2008 IEEE Congress on Services―Part I, Los Alamitos, CA, USA, 6–11 July 2008; pp. 107–108. [Google Scholar] [CrossRef]
- Yang, Y. Application of SOA and Web Service in Implementing Heterogeneous System Integration. In Proceedings of the 2013 International Conference on Information Science and Cloud Computing Companion, Guangzhou, China, 7–8 December 2013; pp. 1–5. [Google Scholar] [CrossRef]
- Hou, T.; Jia, Y.; Wu, Y.; Li, Y.; Han, J. Diagnosing Performance Issues in Microservices with Heterogeneous Data Source. In Proceedings of the 2021 IEEE International Conference on Parallel & Distributed Processing with Applications, Big Data & Cloud Computing, Sustainable Computing & Communications, Social Computing & Networking (ISPA/BDCloud/SocialCom/SustainCom), New York City, NY, USA, 30 September 2021–3 October 2021; pp. 493–500. [Google Scholar] [CrossRef]
- Afanasev, M.Y.; Fedosov, Y.V.; Krylova, A.A.; Shorokhov, S.A. An application of microservices architecture pattern to create a modular computer numerical control system. In Proceedings of the 2017 20th Conference of Open Innovations Association (FRUCT), St. Petersburg, Russia, 3–7 April 2017; pp. 10–19. [Google Scholar] [CrossRef]
- Yan, J.; Xu, H.; Li, L. Modeling and applications for temporal point processes. In Proceedings of the 25th ACM SIGKDD International Conference on Knowledge Discovery & Data Mining, Anchorage, AK, USA, 4–8 August 2019; pp. 3227–3228. [Google Scholar]
- Becchi, M.; Byna, S.; Cadambi, S.; Chakradhar, S. Data-Aware Scheduling of Legacy Kernels on Heterogeneous Platforms with Distributed Memory. In Proceedings of the 22nd Annual ACM Symposium on Parallelism in Algorithms and Architectures (SPAA’10), Santorini, Thira, Greece, 13–15 June 2010; Heide, F.M., Phillips, C.A., Eds.; ACM: New York, NY, USA; pp. 82–91.
- Becchi, M.; Byna, S.; Cadambi, S.; Chakradhar, S. Adaptive Partitioning for Irregular Applications on Heterogeneous CPU-GPU Chips. Procedia Comput. Sci. 2015, 51, 140–149. [Google Scholar]
- Wang, Z.; Zheng, L.; Chen, Q.; Guo, M. CPU+GPU scheduling with asymptotic profiling. Parallel Comput. 2014, 40, 107–115. [Google Scholar] [CrossRef]
- Shen, J.; Varbanescu, A.L.; Lu, Y.; Zou, P.; Sips, H. Workload Partitioning for Accelerating Applications on Heterogeneous Platforms. IEEE Trans. Parallel Distrib. Syst. 2016, 27, 2766–2780. [Google Scholar] [CrossRef]
- Huh, E.-N.; Welch, L.R.; Shirazi, B.A.; Cavanaugh, C.D. Heterogeneous resource management for dynamic real-time systems. In Proceedings of the 9th Heterogeneous Computing Workshop (HCW 2000) (Cat. No.PR00556), Cancun, Mexico, 1 May 2000; pp. 287–296. [Google Scholar] [CrossRef]
- Feng, M.; Guomin, L.; Wenrong, G. Heterogeneous Network Resource Allocation Optimization Based on Improved Bat Algorithm. In Proceedings of the 2018 International Conference on Sensor Networks and Signal Processing (SNSP), Xi’an, China, 28–31 October 2018; pp. 55–59. [Google Scholar] [CrossRef]
- Alhusaini, H.; Prasanna, V.K.; Raghavendra, C.S. A framework for mapping with resource co-allocation in heterogeneous computing systems. In Proceedings of the 9th Heterogeneous Computing Workshop (HCW 2000) (Cat. No.PR00556), Cancun, Mexico, 1 May 2000; pp. 273–286. [Google Scholar] [CrossRef]
- Kim, J.-K.; Siegel, H.J.; Maciejewski, A.A.; Eigenmann, R. Dynamic Resource Management in Energy Constrained Heterogeneous Computing Systems Using Voltage Scaling. IEEE Trans. Parallel Distrib. Syst. 2008, 19, 1445–1457. [Google Scholar] [CrossRef] [Green Version]
- Tian, J.; Liu, Q.; Zhang, H.; Wu, D. Multiagent Deep-Reinforcement-Learning-Based Resource Allocation for Heterogeneous QoS Guarantees for Vehicular Networks. IEEE Internet Things J. 2021, 9, 1683–1695. [Google Scholar] [CrossRef]
- Al Qerm, I.; Pan, J. DeepEdge: A New QoE-Based Resource Allocation Framework Using Deep Reinforcement Learning for Future Heterogeneous Edge-IoT Applications. IEEE Trans. Netw. Serv. Manag. 2021, 18, 3942–3954. [Google Scholar] [CrossRef]
- RIida, R.F.; Trindade, P.H.A.; Faria, B.; Aguayo, L.; Wyglinski, A.M. SatSysSim: A Novel Event-Driven Simulation Framework for DVB/RCS2 Performance Characterization. IEEE Access 2021, 10, 308–318. [Google Scholar] [CrossRef]
- Zhang, X.; Wang, J.; Jiang, C.; Li, H.; Guo, Q.; Wang, X.; Ren, Y. Hardware-in-the-loop simulation system for space information networks. J. Commun. Inf. Netw. 2017, 2, 131–141. [Google Scholar] [CrossRef] [Green Version]
- Connors, P.; Ryu, B.; Dao, S. Modeling and simulation of broad-band satellite networks. I. medium access control for QoS provisioning. IEEE Commun. Mag. 2019, 37, 72–79. [Google Scholar] [CrossRef]
- Al-Hraishawi, H.; Lagunas, E.; Chatzinotas, S. Traffic simulator formultibeam satellite communication systems. In Proceedings of the 2020 10th Advanced Satellite Multimedia Systems Conference and the 16th Signal Processing for Space Communications Workshop (ASMS/SPSC), Frosinone, Italy, 8–10 September 2020; pp. 1–8. [Google Scholar]
- Wang, Y.; Xu, J.; Jiang, L. Challenges of System-Level Simulations and Performance Evaluation for 5G Wireless Networks. IEEE Access 2017, 2, 1553–1561. [Google Scholar] [CrossRef]
- Shao, S.; Hailes, P.; Wang, T.Y.; Wu, J.Y.; Maunder, R.G.; Al-Hashimi, B.M.; Hanzo, L. Survey of turbo, LDPC, and polar decoder ASIC implementations. IEEE Commun. Surv. Tutor. 2019, 21, 2309–2333. [Google Scholar] [CrossRef] [Green Version]
- Fang, Y.; Bu, Y.; Chen, P.; Lau, F.C.; Al Otaibi, S. Irregular-mapped protograph LDPC-coded modulation: A bandwidth-efficient solution for 6G-enabled mobile networks. IEEE Trans. Intell. Transp. Syst. 2021. [Google Scholar] [CrossRef]
- Bioglio, V.; Condo, C.; Land, I. Design of polar codes in 5G new radio. IEEE Commun. Surv. Tutor. 2020, 23, 29–40. [Google Scholar] [CrossRef] [Green Version]
- Raghav, S.; Ruggiero, M.; Marongiu, A.; Pinto, C.; Atienza, D.; Benini, L. GPU Acceleration for Simulating Massively Parallel Many-Core Platforms. IEEE Trans. Parallel Distrib. Syst. 2015, 26, 1336–1349. [Google Scholar] [CrossRef]
- Nikdel, Z.; Bing, G.; Neville, S.W. DockerSim: Full-stack simulation of container-based Software-as-a-Service (SaaS) cloud deployments and environments. In Proceedings of the 2017 IEEE Pacific Rim Conference on Communications, Computers and Signal Processing (PACRIM), Victoria, BC, Canada, 21–23 August 2017; pp. 1–6. [Google Scholar]
- Steinbach, M.; Jindal, A.; Chadha, M.; Gerndt, M.; Benedict, S. TppFaaS: Modeling Serverless Functions Invocations via Temporal Point Processes. IEEE Access 2022, 10, 9059–9084. [Google Scholar] [CrossRef]
- Aytekin, A.; Johansson, M. Exploiting Serverless Runtimes for Large-Scale Optimization. In Proceedings of the 2019 IEEE 12th International Conference on Cloud Computing (CLOUD), Milan, Italy, 8–13 July 2019; pp. 499–501. [Google Scholar] [CrossRef]
- Ramachandran, L.; Narendra, N.C.; Ponnalagu, K. Dynamic provisioning in multi-tenant service clouds. Serv. Oriented Comput. Appl. 2012, 6, 283–302. [Google Scholar] [CrossRef]
- Zhou, C.; Gong, C.; Hui, H.; Lin, F.; Zeng, G. A task-resource joint management model with intelligent control for mission-aware dispersed computing. China Commun. 2021, 18, 214–232. [Google Scholar] [CrossRef]
- Al-Azzoni, I.; Iqbal, S. Meta-Heuristics for Solving the Software Component Allocation Problem. IEEE Access 2020, 8, 153067–153076. [Google Scholar] [CrossRef]
- Pohlmann, U.; Hüwe, M. Model-driven allocation engineering:Specifying and solving constraints based on the example of automo-tive systems. Autom. Softw. Eng. 2019, 26, 315–378. [Google Scholar] [CrossRef]
- Aleti, S.; Bjornander, L.; Grunske; Meedeniya, I. ArcheOpterix: An extendable tool for architecture optimization of AADL models. In Proceedings of the ICSE Workshop Model-Based Methodologies Pervasive Embedded Softw, Los Alamitos, CA, USA, 16 May 2009; pp. 61–71. [Google Scholar]
- OSATE (Open Source AADL Tool Environment). Available online: https://osate.org (accessed on 1 July 2022).
- Aleti, L.; Grunske, I.; Meedeniya, I.; Moser, I. Let the ants deploy your software—An ACO based deployment optimisation strategy. In Proceedings of the 2009 IEEE/ACM International Conference on Automated Software Engineering, Auckland, New Zealand, 16–20 November 2009; pp. 505–509. [Google Scholar]
- Guan, X.; Wan, X.; Choi, B.-Y.; Song, S.; Zhu, J. Application Oriented Dynamic Resource Allocation for Data Centers Using Docker Containers. IEEE Commun. Lett. 2016, 21, 504–507. [Google Scholar] [CrossRef]
- Monsalve, A.; Landwehr, A.; Taufer, M. Dynamic CPU Resource Allocation in Containerized Cloud Environments. In Proceedings of the 2015 IEEE International Conference on Cluster Computing, Shenzhen, China, 4–7 May 2015; pp. 535–536. [Google Scholar]
- Kaewkasi, C.; Chuenmuneewong, K. Improvement of Container Scheduling for Docker Using Ant Colony Optimization. In Proceedings of the 2017 9th international conference on knowledge and smart technology (KST), Chonburi, Thailand, 1–4 February 2017; pp. 254–259. [Google Scholar]
- Li, Y.; Zhang, J.; Jiang, C.; Wan, J.; Ren, Z. PINE: Optimizing Performance Isolation in Container Environments. IEEE Access 2019, 7, 30410–30422. [Google Scholar] [CrossRef]
- Waibel, P.; Hochreiner, C.; Schulte, S.; Koschmider, A.; Mendling, J. ViePEP-C: A Container-Based Elastic Process Platform. IEEE Trans. Cloud Comput. 2019, 9, 1657–1674. [Google Scholar] [CrossRef] [Green Version]
- Jena, T.; Mohanty, J.R. GA-Based Customer-Conscious Resource Allocation and Task Scheduling in Multi-cloud Computing. Arab. J. Sci. Eng. 2017, 43, 4115–4130. [Google Scholar] [CrossRef]
- Tao, Y.; Feng, L.; Zhang, L.; Liao, T.W. CLPS-GA: A library and pareto solution-based hybrid genetic algorithm forenergy-aware cloud service scheduling. Appl. Soft Comput. 2014, 19, 264–279. [Google Scholar] [CrossRef]
- Sun, G.; Yu, H.; Anand, V.; Li, L. A cost efficient framework and algorithm for embedding dynamic virtual network requests. Future Gener. Comput. Syst. 2013, 29, 1265–1277. [Google Scholar] [CrossRef]
- Cheng, X.; Su, S.; Zhang, Z.; Shuang, K.; Yang, F.; Luo, Y.; Wang, J. Virtual network embedding through topology awareness and optimization. Comput. Netw. 2012, 56, 1797–1813. [Google Scholar] [CrossRef]
- Lu, J.; Turner, J. Efficient Mapping of Virtual Networks onto a Shared Substrate; Washington University in St Louis: St. Louis, MI, USA, 2006. [Google Scholar] [CrossRef] [Green Version]
- Szeto, W.; Iraqi, Y.; Boutaba, R. A multi-commodity flow based approach to virtual network resource allocation. In Proceedings of the GLOBECOM’03. IEEE Global Telecommunications Conference (IEEE Cat. No. 03CH37489), San Francisco, CA, USA, 1–5 December 2003; Volume 6, pp. 3004–3008. [Google Scholar]
- Zhu, Y.; Ammar M, H. Algorithms for assigning substrate network resources to virtual network components. In Proceedings of the 25TH IEEE International Conference on Computer Communications. Barcelona, Spain, 23–29 April 2006; pp. 1–12. [Google Scholar]
- Liu, W.; Xiang, Y.; Ma, S.; Tang, X. Completing Virtual Network Embedding All in One Mathematical Programming. In Proceedings of the 2011 International Conference on Electronics, Communications and Control (ICECC), Ningbo, China, 9–11 September 2011; pp. 183–185. [Google Scholar]
- Schaffrath, G.; Werle, C.; Papadimitriou, P.; Feldmann, A.; Bless, R.; Greenhalgh, A. Network Virtualization Architecture: Proposal and Initial Prototype. In Proceedings of the 1st ACM workshop on Virtualized Infrastructure Systems and Architectures, New York, NY, USA, 17 August 2009; pp. 63–72. [Google Scholar]
- Houidi, I.; Louati, W.; Ameur, W.B.; Zeghlache, D. Virtual network provisioning across multiple substrate networks. Comput. Netw. 2011, 55, 1011–1023. [Google Scholar] [CrossRef]
- Wei, X.; Li, H.; Yang, K.; Zou, L. Topology-aware partial virtual cluster mapping algorithm on shared distributed infrastructures. IEEE Trans. Parallel Distrib. Syst. 2013, 25, 2721–2730. [Google Scholar] [CrossRef]
- Pei, J.; Hong, P.; Xue, K.; Li, D. Efficiently embedding service function chains with dynamic virtual network function placement in geo-distributed cloud system. IEEE Trans. Parallel Distrib. Syst. 2018, 30, 2179–2192. [Google Scholar] [CrossRef]
- Zhang, Q.; Liang, X.; Zhu, Y.; Wang, X.; Palacharla, P.; Sarin, V.; Ikeuchi, T. Vertex-centric distributed computation for mapping virtual networks across domains. In Proceedings of the NOMS 2018–2018 IEEE/IFIP Network Operations and Management Symposium, Taipei, Taiwan, 23–27 April 2018; pp. 1–8. [Google Scholar]
- Alhazmi, K.; Sharkh, M.A.; Shami, A. Drawing the cloud map: Virtual network provisioning in distributed cloud computing data centers. IEEE Syst. J. 2016, 12, 1480–1491. [Google Scholar] [CrossRef]
- Zong, Y.; Ou, Y.; Hammad, A.; Kondepu, K.; Nejabati, R.; Simeonidou, D. Location-aware energy efficient virtual network embedding in software-defined optical data center networks. J. Opt. Commun. Netw. 2018, 10, B58–B70. [Google Scholar] [CrossRef]
- Dahir, M.H.; Alizadeh, H.; Gözüpek, D. Energy efficient virtual network embedding for federated software-defined networks. Int. J. Commun. Syst. 2019, 32, e3912. [Google Scholar] [CrossRef]
- Chen, X.; Li, C.; Jiang, Y. Optimization model and algorithm for energy efficient virtual node embedding. IEEE Commun. Lett. 2015, 19, 1327–1330. [Google Scholar] [CrossRef]
- Zhang, Z.; Cao, H.; Su, S.; Li, W. Energy aware virtual network migration. IEEE Trans. Cloud Comput. 2020. [Google Scholar] [CrossRef]
- Chen, M.; Sun, Y.; Hu, H.; Tang, L.; Fan, B. Energy-saving and resource-efficient algorithm for virtual network function placement with network scaling. IEEE Trans. Green Commun. Netw. 2020, 5, 29–40. [Google Scholar] [CrossRef]
- Zhang, X.; Xu, Z.; Fan, L.; Yu, S.; Qu, Y. Near-optimal energy-efficient algorithm for virtual network function placement. IEEE Trans. Cloud Comput. 2019, 10, 553–567. [Google Scholar] [CrossRef]
- Ayoub, O.; Bovio, A.; Musumeci, F.; Tornatore, M. Survivable virtual network mapping with fiber tree establishment in filterless optical networks. IEEE Trans. Netw. Serv. Manag. 2021, 19, 37–48. [Google Scholar] [CrossRef]
- Liu, Y.; Han, P.; Hou, J.; Zheng, J. Resource-Efficiently survivable IoT services provisioning via virtual network embedding in fiber-wireless access network. IEEE Access 2019, 7, 65007–65018. [Google Scholar] [CrossRef]
- Li, X.; Gao, T.; Zhang, L.; Tang, Y.; Zhang, Y.; Huang, S. Survivable K-node (edge) content connected virtual optical network (KC-VON) embedding over elastic optical data center networks. IEEE Access 2018, 6, 38780–38793. [Google Scholar] [CrossRef]
- Cao, H.; Zhao, H.; Luo, D.X.; Kumar, N.; Yang, L. Dynamic virtual resource allocation mechanism for survivable services in emerging NFV-enabled vehicular networks. IEEE Trans. Intell. Transp. Syst. 2021. [Google Scholar] [CrossRef]
- Chen, Y.; Zhang, G.; Hu, D.; Tao, Q. Multiscale emulation technology based on the integration of virtualization, physical and simulation networks. In Proceedings of the 2019 IEEE Fourth International Conference on Data Science in Cyberspace (DSC), Hangzhou, China, 23–25 June 2019; pp. 396–402. [Google Scholar]
- Ricci, R.; Alfeld, C.; Lepreau, J. A solver for the network testbed mapping problem. ACM SIGCOMM Comput. Commun. Rev. 2003, 33, 65–81. [Google Scholar] [CrossRef]
- Sheng, Z.; Qian, Z.; Song, G.; Lu, S. FELL: A flexible virtual network embedding algorithm with guaranteed load balancing. In Proceedings of the 2011 IEEE international conference on communications (ICC), Kyoto, Japan, 5–9 June 2011; pp. 1–5. [Google Scholar]
- Boyang, L.; Muqing, W.; Haosen, Z. Virtual Network Embedding Based on Hybrid Adaptive Genetic Algorithm. In Proceedings of the 2019 IEEE 5th International Conference on Computer and Communications (ICCC), Chengdu, China, 6–9 December 2019; pp. 1197–1202. [Google Scholar]
- Cheng, X.; Su, S.; Zhang, Z.; Wang, H.; Yang, F.; Luo, Y.; Wang, J. Virtual network embedding through topology-aware node ranking. ACM SIGCOMM Comput. Commun. Rev. 2011, 41, 38–47. [Google Scholar] [CrossRef]
- Zhang, P.; Yao, H.; Li, M.; Liu, Y. Virtual network embedding based on modified genetic algorithm. Peer―Peer Netw. Appl. 2019, 12, 481–492. [Google Scholar] [CrossRef]
- Zhang, P.; Yao, H.; Li, M.; Liu, Y. Multi-objective enhanced particle swarm optimization in virtual network embedding. EURASIP J. Wirel. Commun. Netw. 2016, 2016, 1–9. [Google Scholar] [CrossRef] [Green Version]
- Zhang, S. Reliable virtual network mapping algorithm with network characteristics and associations. IEEE Access 2021, 9, 48121–48130. [Google Scholar] [CrossRef]
- Cao, H.; Zhu, H.; Yang, L. Collaborative attributes and resources for single-stage virtual network mapping in network virtualization. J. Commun. Netw. 2019, 22, 61–71. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Classification | Configuration | Parameter |
|---|---|---|
| Hardware | CPU | i7 4.6 GHz |
| Memory | 8 GB | |
| SSD | 512 GB | |
| Simulation | Constellation | Walker |
| Satellite altitude | 1200 km | |
| Number of satellites | 64 | |
| Number of satellite planes | 8 | |
| Distribution of users | Europe, China, America Poisson distribution | |
| Number of users | 1000 | |
| Protocol | RRC/SDAP/PDCP/RLC/MAC | |
| Code | LDPC/Polar | |
| Modulation | BPSK/QPSK |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Deng, Z.; Yu, X. Resource Mapping Allocation Scheme in 6G Satellite Twin Network. Sensors 2022, 22, 5816. https://doi.org/10.3390/s22155816
Deng Z, Yu X. Resource Mapping Allocation Scheme in 6G Satellite Twin Network. Sensors. 2022; 22(15):5816. https://doi.org/10.3390/s22155816
Chicago/Turabian StyleDeng, Zhongliang, and Xiaoyi Yu. 2022. "Resource Mapping Allocation Scheme in 6G Satellite Twin Network" Sensors 22, no. 15: 5816. https://doi.org/10.3390/s22155816
APA StyleDeng, Z., & Yu, X. (2022). Resource Mapping Allocation Scheme in 6G Satellite Twin Network. Sensors, 22(15), 5816. https://doi.org/10.3390/s22155816