
Powering UAV with Deep Q-Network for Air Quality Tracking



Abstract
:1. Introduction
- We introduce the DQN solution to track unhealthy polluted environments. We mainly focus on finding the unhealthy polluted area (i.e., AQI > 150) from the air-polluted environment using multi-navigation patterns.
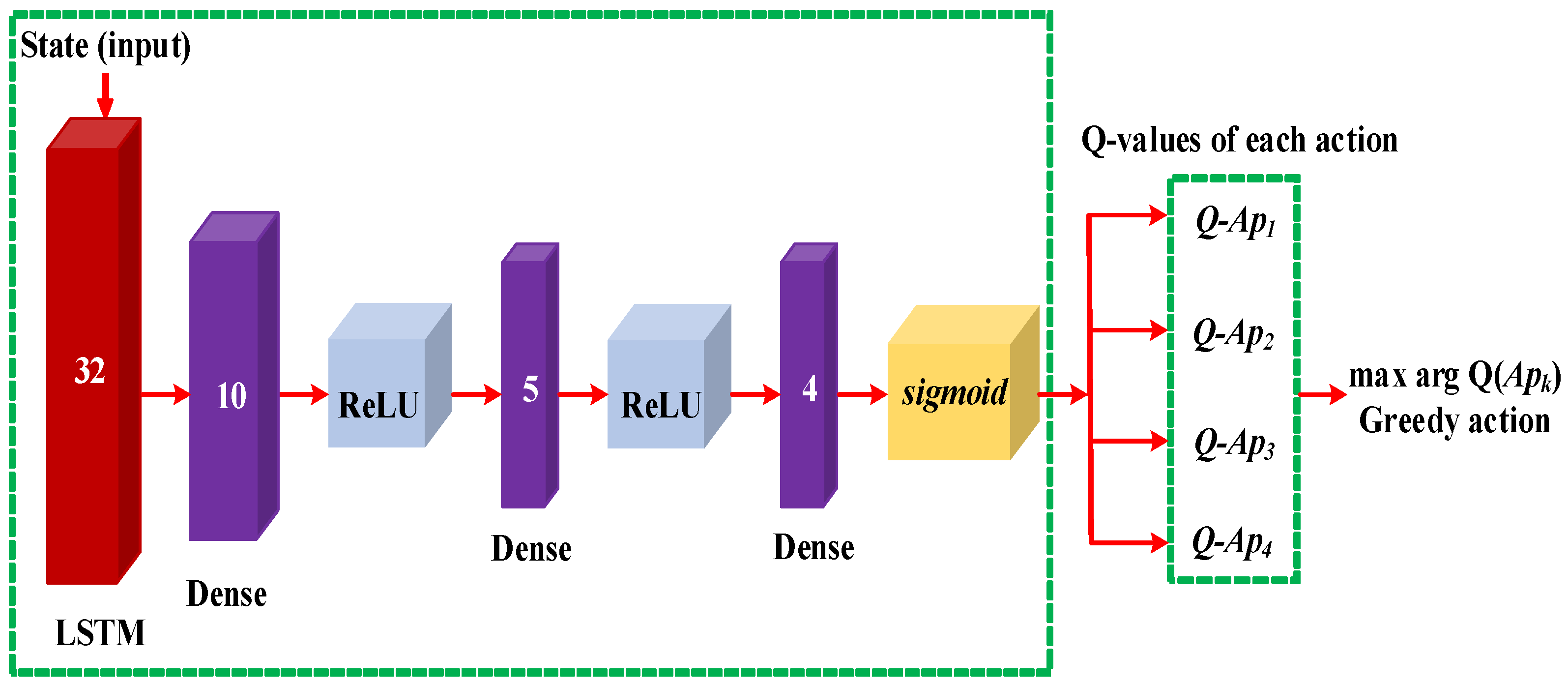
- We apply a long short-term memory (LSTM) combined with DQN to predict sub-optimal UAV navigation patterns with the measurement time-sequential AQI data.
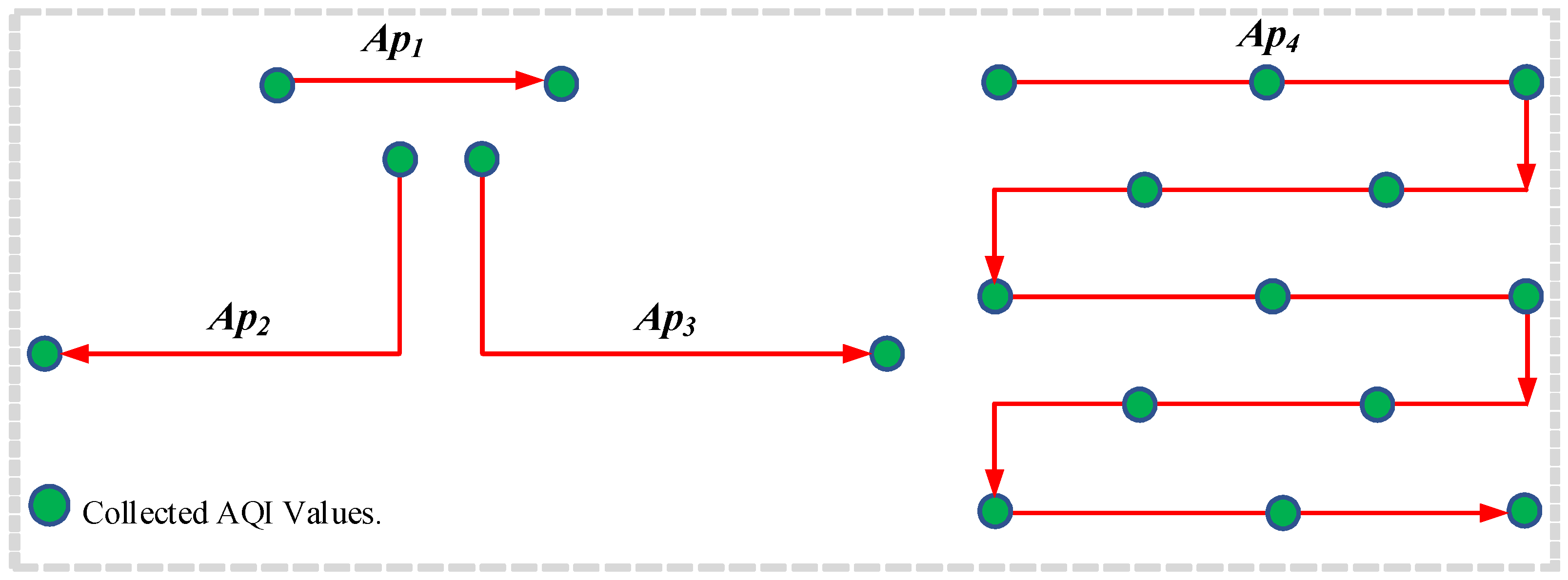
- The proposed solution selects multi-pattern navigation (i.e., forward, down-right, down-left, zigzag) in the action space of the DQN.
- The UAV agent can decide a specific navigation pattern chosen by the LSTM Q-network at the particular situation or state of the environment to reduce the UAV navigation distances and time.
2. Related Work
2.1. Monitoring AQI the Entire Area
2.2. Tracking Unhealthy Polluted Area
3. DQN-Based UAV Pollution Tracking (DUPT) Methodology
3.1. System Overview
3.2. State Space
3.3. Action Space
3.4. Reward Space
3.5. Training Methodology
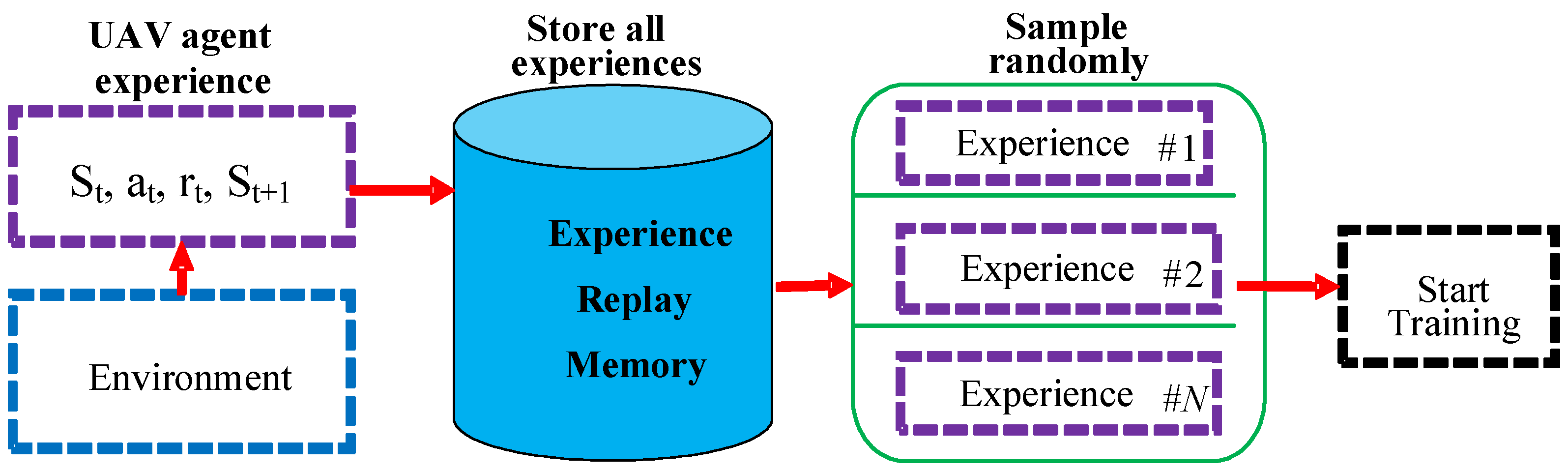
3.5.1. Experience Replay Memory and Mini-Batch (ERM)
3.5.2. Separate Target Q-Network (STQN)
3.6. Q-Network in DUPT
| Algorithm 1: DUPT Algorithm |
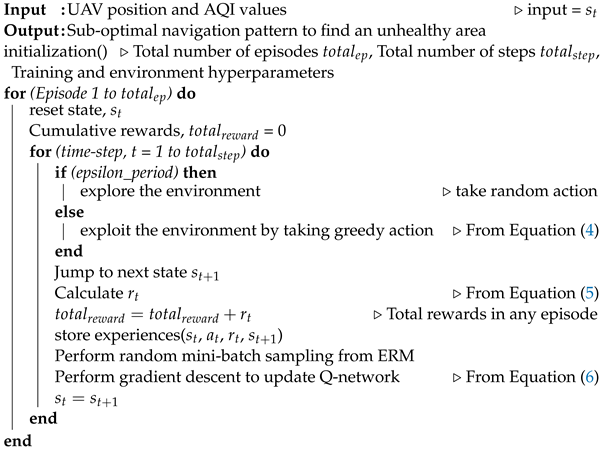 |
4. Simulation and Result Analysis
4.1. DUPT Simulation Setup
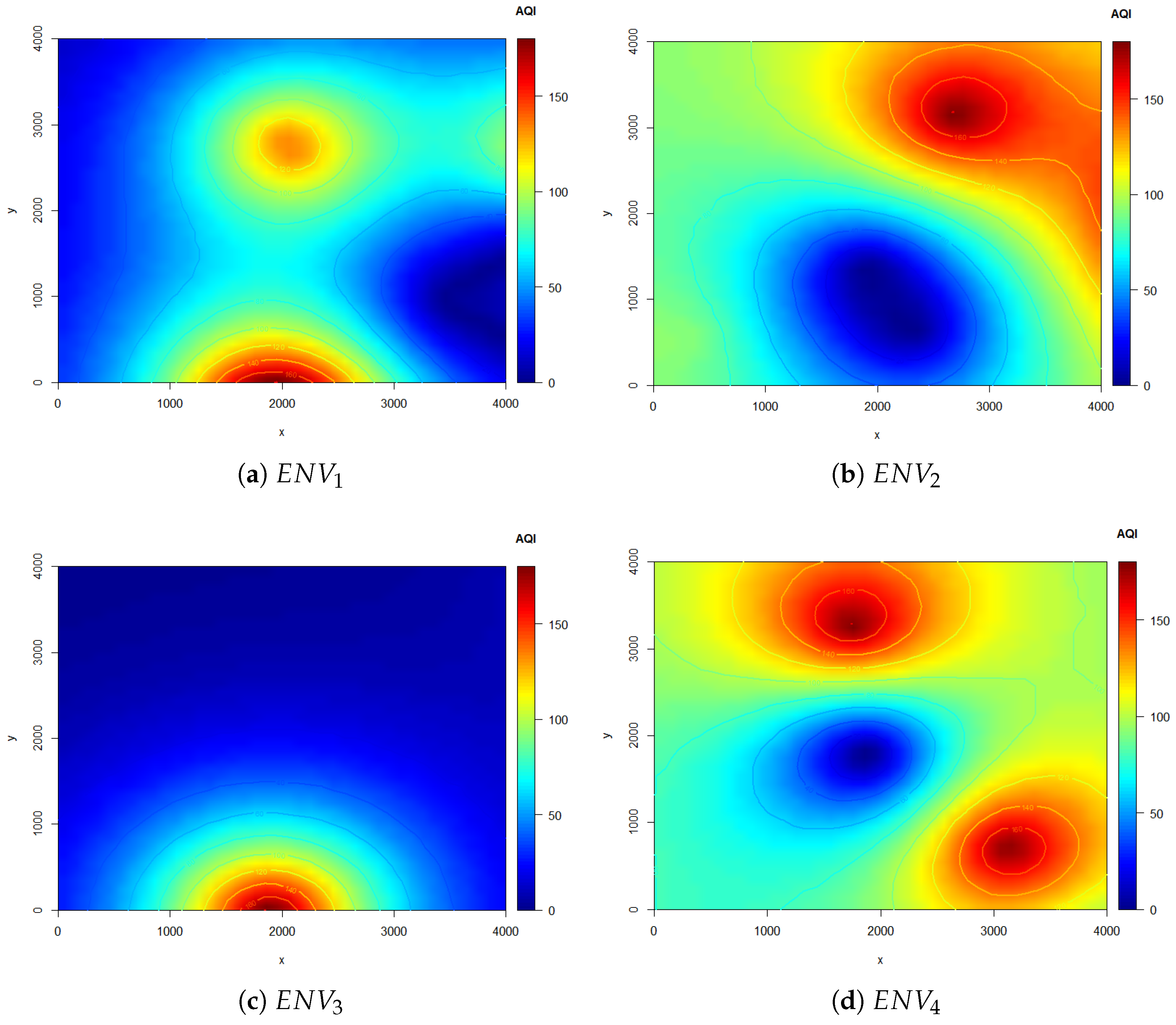
4.1.1. Environment and UAV Setup
4.1.2. DUPT Training Hyperparameters
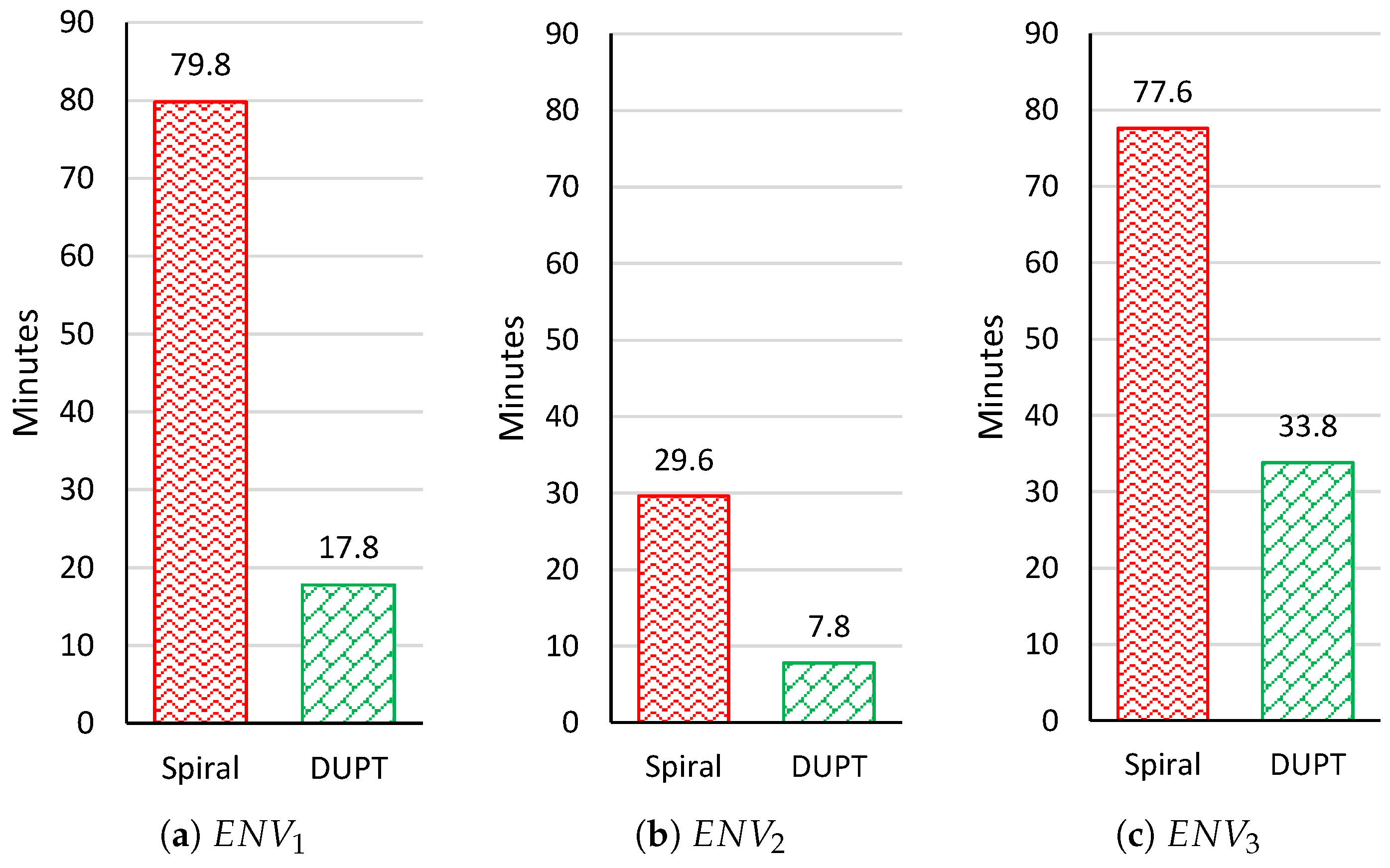
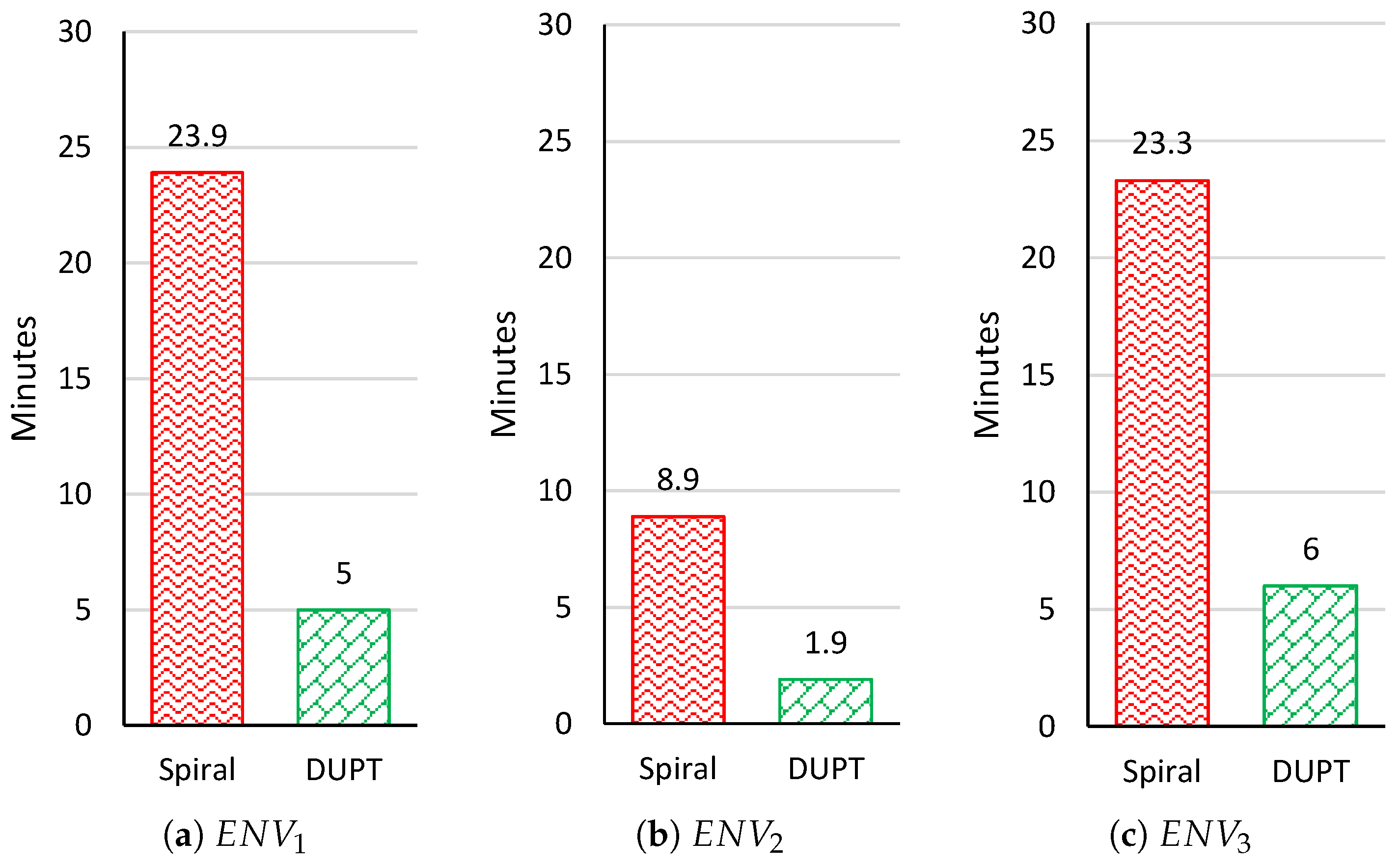
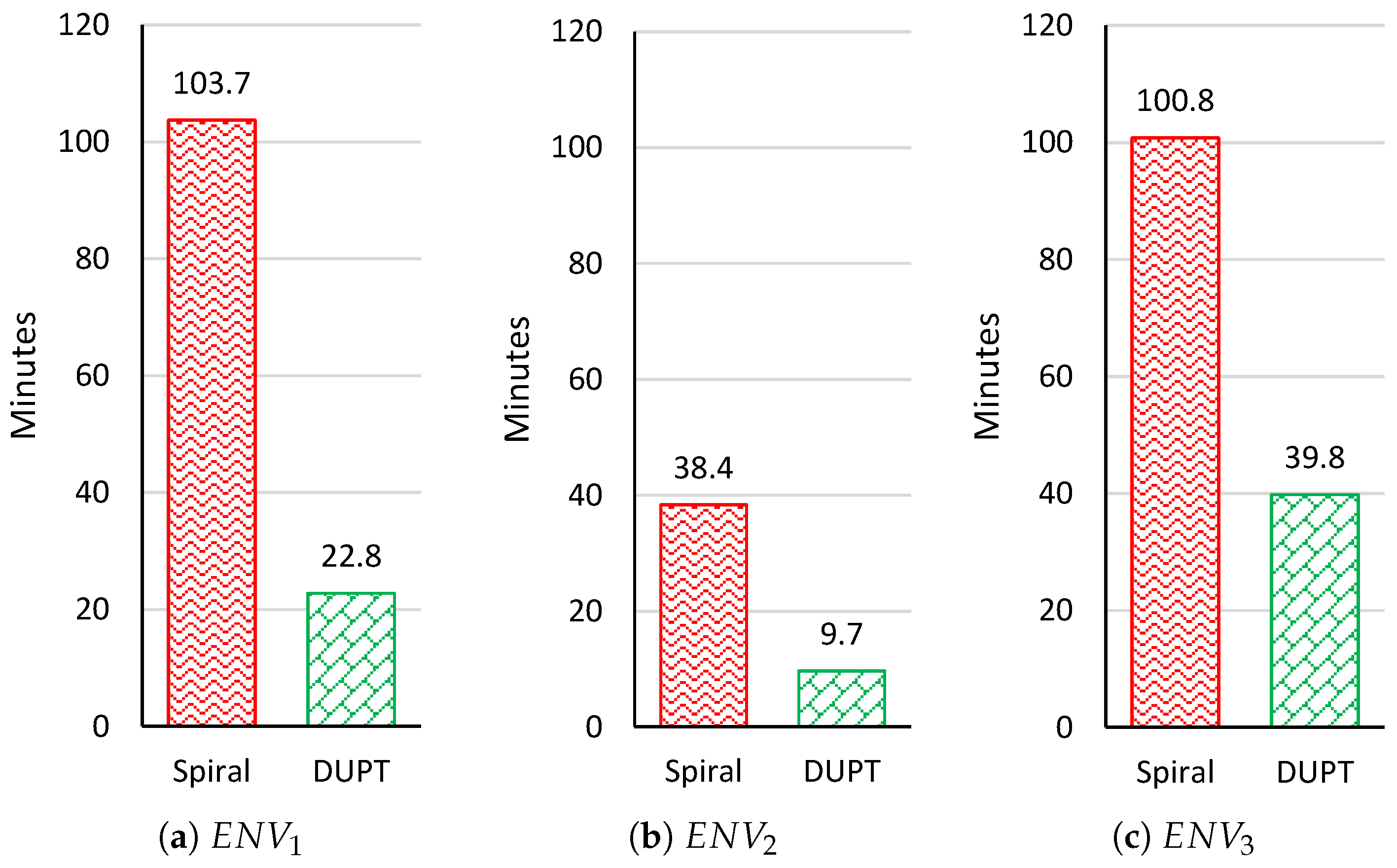
4.2. Simulation Result Analysis
- A.
- : In this setup condition, the UAV agent will stop traveling if the UAV reaches an unhealthy area (i.e., AQI > 150) to reduce the distance coverage and time.
- B.
- : In this setup condition, the UAV agent continues its traveling until it reaches the maximum time-step threshold (i.e., 200) in an episode even though the system reaches the unhealthy polluted area.
4.2.1. Single Unhealthy Area ()
4.2.2. Multiple Unhealthy Area Using
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Tammineni, Y.; Dakuri, T. Vizag gas leak-a case study on the uncontrolled styrene vapour release for the first time in India. Chief Ed. 2020, 5, 13–24. [Google Scholar] [CrossRef]
- Kim, Y.; Kim, M.; Kim, W. Effect of the Fukushima nuclear disaster on global public acceptance of nuclear energy. Energy Policy 2013, 61, 822–828. [Google Scholar] [CrossRef]
- Gu, Q.; R Michanowicz, D.; Jia, C. Developing a modular unmanned aerial vehicle (UAV) platform for air pollution profiling. Sensors 2018, 18, 4363. [Google Scholar] [CrossRef]
- United State Environmental Protection Agency. Patient Exposure and the Air Quality Index. Available online: https://www.epa.gov/pmcourse/patient-exposure-and-air-quality-index (accessed on 13 July 2022).
- Fekih, M.A.; Mokhtari, I.; Bechkit, W.; Belbaki, Y.; Rivano, H. On the regression and assimilation for air quality mapping using dense low-cost wsn. In Proceedings of the International Conference on Advanced Information Networking and Applications, Caserta, Italy, 15–17 April 2020; pp. 566–578. [Google Scholar] [CrossRef]
- Mnih, V.; Kavukcuoglu, K.; Silver, D.; Rusu, A.A.; Veness, J.; Bellemare, M.G.; Graves, A.; Riedmiller, M.; Fidjeland, A.K.; Ostrovski, G.; et al. Human-level Control through Deep Reinforcement Learning. Nature 2015, 518, 529–533. [Google Scholar] [CrossRef]
- Weber, K.; Heweling, G.; Fischer, C.; Lange, M. The use of an octocopter UAV for the determination of air pollutants—A case study of the traffic induced pollution plume around a river bridge in Duesseldorf, Germany. Int. J. Educ. Learn. Syst. 2017, 2, 63–66. [Google Scholar]
- Gao, J.; Hu, Z.; Bian, K.; Mao, X.; Song, L. AQ360: UAV-aided air quality monitoring by 360-degree aerial panoramic images in urban areas. IEEE Internet Things J. 2020, 8, 428–442. [Google Scholar] [CrossRef]
- Al Tahtawi, A.R.; Andika, E.; Yusuf, M.; Harjanto, W.N. Design of Quadrotor UAV and Internet-of-Things Based Air Pollution Monitoring Systems. Int. J. Inf. Technol. Electr. Eng. 2019, 3, 120–127. [Google Scholar] [CrossRef]
- Boubrima, A.; Knightly, E.W. Robust mission planning of UAV networks for environmental sensing. In Proceedings of the 6th ACM Workshop on Micro Aerial Vehicle Networks, Systems, and Applications, Toronto, ON, Canada, 19 June 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Liu, S.; Yang, X.; Zhou, X. Development of a low-cost UAV-based system for CH4 monitoring over oil fields. Environ. Technol. 2020, 42, 1–10. [Google Scholar] [CrossRef] [PubMed]
- Fu, Z.; Chen, Y.; Ding, Y.; He, D. Pollution source localization based on multi-UAV cooperative communication. IEEE Access 2019, 7, 29304–29312. [Google Scholar] [CrossRef]
- Prathyusha, Y.; Lee, C.N. UAV Path Planning and Collaborative Searching for Air Pollution Source Using the Particle Swarm Optimization. In Proceedings of the International Computer Symposium, Yunlin, Taiwan, 20–22 December 2018; pp. 698–709. [Google Scholar] [CrossRef]
- Araujo, J.O.; Valente, J.; Kooistra, L.; Munniks, S.; Peters, R.J. Experimental flight patterns evaluation for a UAV-based air pollutant sensor. Micromachines 2020, 11, 768. [Google Scholar] [CrossRef] [PubMed]
- Alvear, O.; Zema, N.R.; Natalizio, E.; Calafate, C.T. Using UAV-based systems to monitor air pollution in areas with poor accessibility. J. Adv. Transp. 2017, 2017, 8204353. [Google Scholar] [CrossRef]
- Alvear, O.; Calafate, C.T.; Zema, N.R.; Natalizio, E.; Hernández-Orallo, E.; Cano, J.C.; Manzoni, P. A discretized approach to air pollution monitoring using UAV-based sensing. Mob. Netw. Appl. 2018, 23, 1693–1702. [Google Scholar] [CrossRef]
- Mokhtari, I.; Bechkit, W.; Rivano, H. A generic framework for monitoring pollution plumes in emergencies using UAVs. In Proceedings of the 2021 International Joint Conference on Neural Networks (IJCNN), Shenzhen, China, 18–22 July 2021; pp. 1–9. [Google Scholar] [CrossRef]
- Jumaah, H.J.; Kalantar, B.; Halin, A.A.; Mansor, S.; Ueda, N.; Jumaah, S.J. Development of UAV-Based PM2.5 Monitoring System. Drones 2021, 5, 60. [Google Scholar] [CrossRef]
- De Fazio, R.; Dinoi, L.M.; De Vittorio, M.; Visconti, P. A Sensor-Based Drone for Pollutants Detection in Eco-Friendly Cities: Hardware Design and Data Analysis Application. Electronics 2022, 11, 52. [Google Scholar] [CrossRef]
- Chen, Z.; Stol, K.; Richards, P. Preliminary design of multirotor UAVs with tilted-rotors for improved disturbance rejection capability. Aerosp. Sci. Technol. 2019, 92, 635–643. [Google Scholar] [CrossRef]
- Dabiri, M.T.; Safi, H.; Parsaeefard, S.; Saad, W. Analytical channel models for millimeter wave UAV networks under hovering fluctuations. IEEE Trans. Wirel. Commun. 2020, 19, 2868–2883. [Google Scholar] [CrossRef]
- Sultan, S.M.; Waleed, M.; Pyun, J.Y.; Um, T.W. Energy Conservation for Internet of Things Tracking Applications Using Deep Reinforcement Learning. Sensors 2021, 21, 3261. [Google Scholar] [CrossRef] [PubMed]
- Kingma, D.P.; Ba, J. Adam: A method for stochastic optimization. arXiv 2014, arXiv:1412.6980. [Google Scholar]
- Ho, Y.; Wookey, S. The real-world-weight cross-entropy loss function: Modeling the costs of mislabeling. IEEE Access 2019, 8, 4806–4813. [Google Scholar] [CrossRef]
- Google Brain Team. Tensorflow. Available online: https://www.tensorflow.org/ (accessed on 15 April 2020).
- Rossum, G.V. Python. Available online: https://www.python.org/ (accessed on 12 March 2022).
- Chollet, F. Keras. Available online: https://keras.io/ (accessed on 15 April 2022).






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Study | Purpose | Method | Advantages | Disadvantages |
|---|---|---|---|---|
| [18,19] | Monitoring | Arduino sensor modules | Air quality monitoring system | Not used for tracking. Navigation pattern not defined |
| [12] | Tracking | Particle swarm optimization and artificial potential field | Used multi-UAV under ad hoc network to avoid collision | Could not support in the complex multi-pollution environment |
| [15,16] | Tracking and Monitoring | Spiral Pollution-driven UAV Control | Covered the all polluted area | Navigation time is large due to spiral navigation pattern |
| DUPT | Tracking | DQN | Find out the unhealthy area within a short duration of time in both single and multi-pollution environments | Monitoring the air pollution environment with multi-UAV is out of this research scope |
| Symbols | Description |
|---|---|
| previously selected subarea before of UAV | |
| previously selected subarea before current subarea of UAV | |
| current subarea of UAV | |
| previous AQI value before | |
| previous AQI value before current | |
| current AQI value | |
| difference between and | |
| difference between and |
| Parameters | Value |
|---|---|
| Size of a environment | 4000 m × 4000 m [15,16] |
| Total number of subareas | 1600 |
| Large AQI difference threshold () | 10 |
| Number of UAVs in the environment | 1 |
| UAV average speed () | 15 m/s |
| UAV step distance for action | 500 m |
| UAV step distance for action and | 1000 m |
| UAV step distance for action | 200 m |
| AQI collection time () | 4 s [15,16] |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mohammed, A.F.Y.; Sultan, S.M.; Cho, S.; Pyun, J.-Y. Powering UAV with Deep Q-Network for Air Quality Tracking. Sensors 2022, 22, 6118. https://doi.org/10.3390/s22166118
Mohammed AFY, Sultan SM, Cho S, Pyun J-Y. Powering UAV with Deep Q-Network for Air Quality Tracking. Sensors. 2022; 22(16):6118. https://doi.org/10.3390/s22166118
Chicago/Turabian StyleMohammed, Alaelddin F. Y., Salman Md Sultan, Seokheon Cho, and Jae-Young Pyun. 2022. "Powering UAV with Deep Q-Network for Air Quality Tracking" Sensors 22, no. 16: 6118. https://doi.org/10.3390/s22166118
APA StyleMohammed, A. F. Y., Sultan, S. M., Cho, S., & Pyun, J.-Y. (2022). Powering UAV with Deep Q-Network for Air Quality Tracking. Sensors, 22(16), 6118. https://doi.org/10.3390/s22166118