
A Dual-Adaptive Equivalent Consumption Minimization Strategy for 4WD Plug-In Hybrid Electric Vehicles


Abstract
:1. Introduction
- A novel 4WD PHEV energy management strategy, DA-ECMS, is proposed, realizing multi-layer control architecture, combining condition category awareness and the multi-energy system.
- The collaborative optimization management of the power source fuel-electric system and the front/rear axle electric drive system is completed, giving full play to the energy-saving potential of the 4WD PHEV.
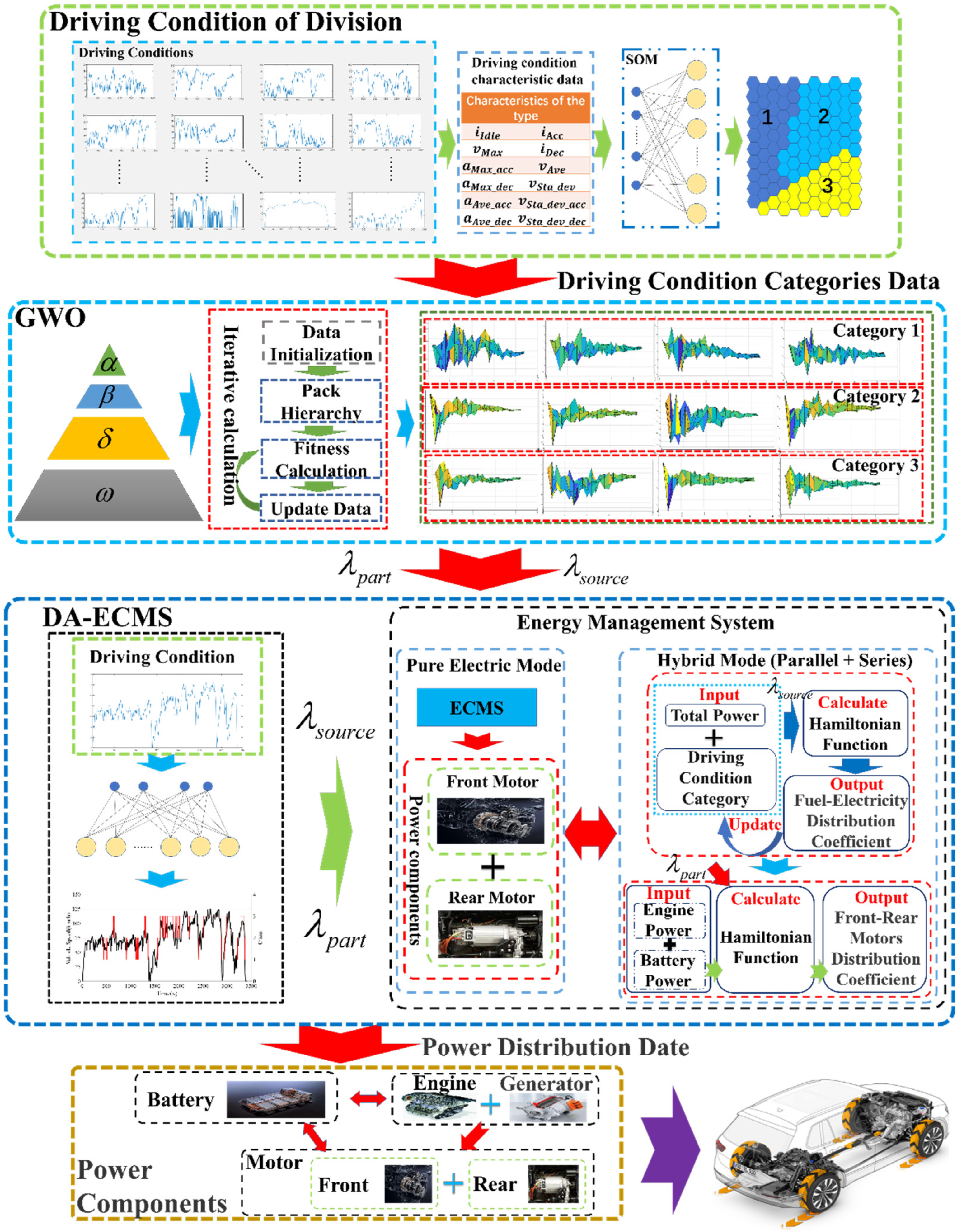
- The classification of driving conditions and the optimization of multi-dimensional equivalent factors by SOM and GWO are completed offline, and the identification of driving conditions and the matching of multi-dimensional equivalent factors are realized online. The adaptability of the DA-ECMS is improved under different driving conditions.
2. 4WD PHEV and Model Construction
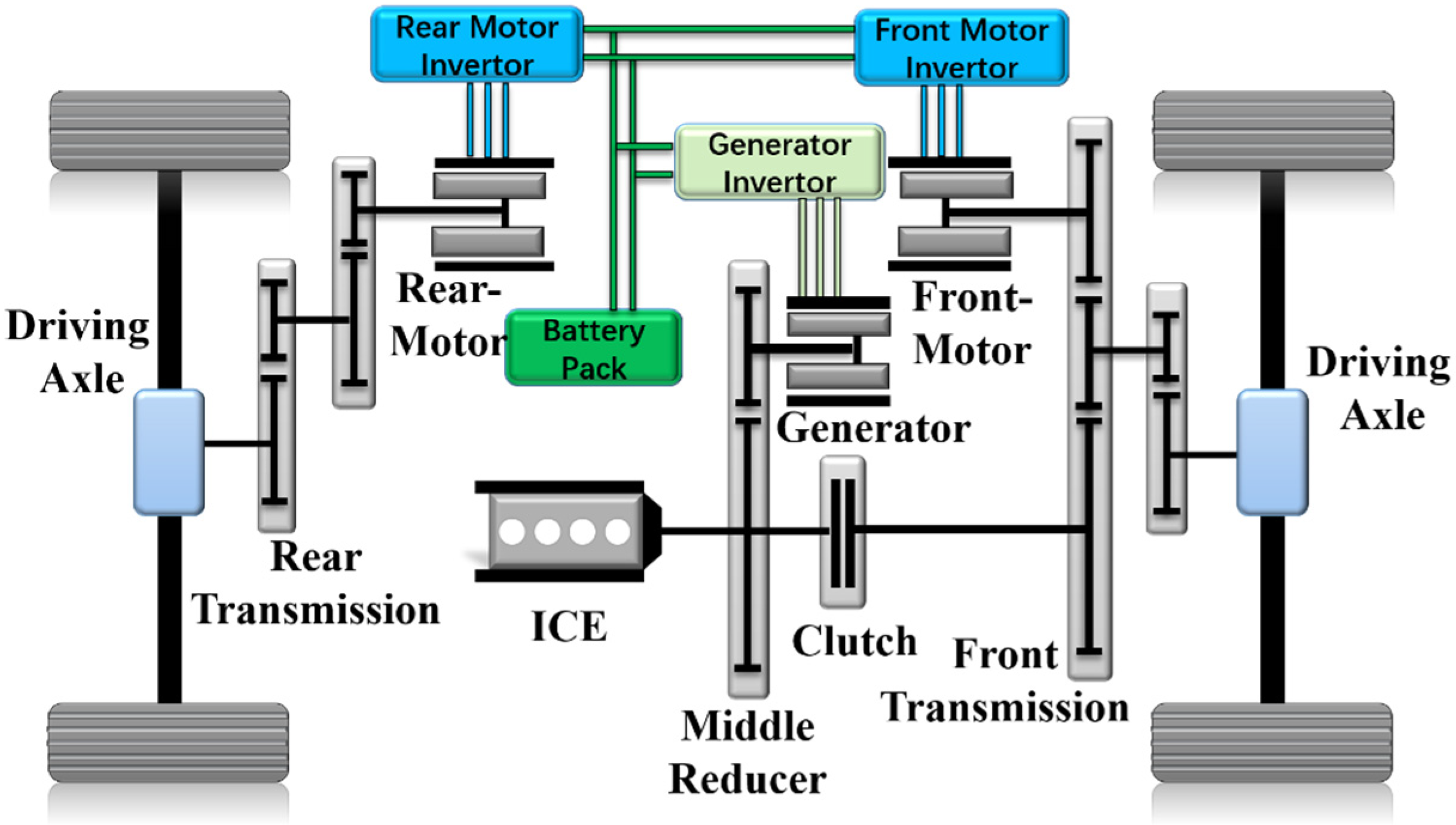
2.1. 4WD PHEV
2.2. Mathematic Model of 4WD PHEV
2.2.1. Vehicle Dynamic Model
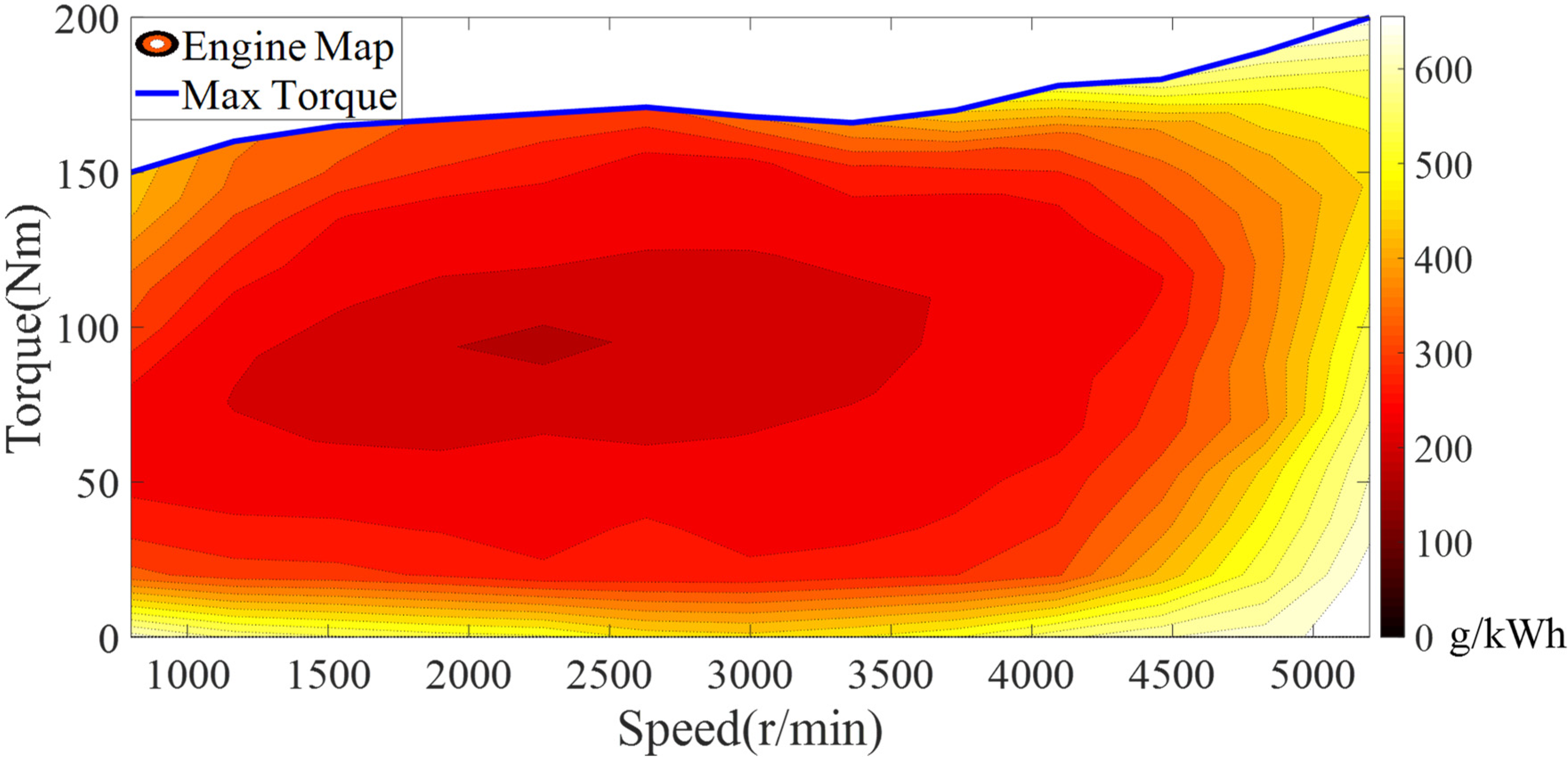
2.2.2. Engine Model
2.2.3. Motor/Generator Model
2.2.4. Battery Model
3. Methodology
3.1. Classification and Online Identification of Driving Conditions Based on SOM
3.2. Optimization of Equivalent Factors Parameters Based on GWO
3.3. Collaborative Multi-Energy Output Based on DA-ECMS
4. Simulation Results and Analysis
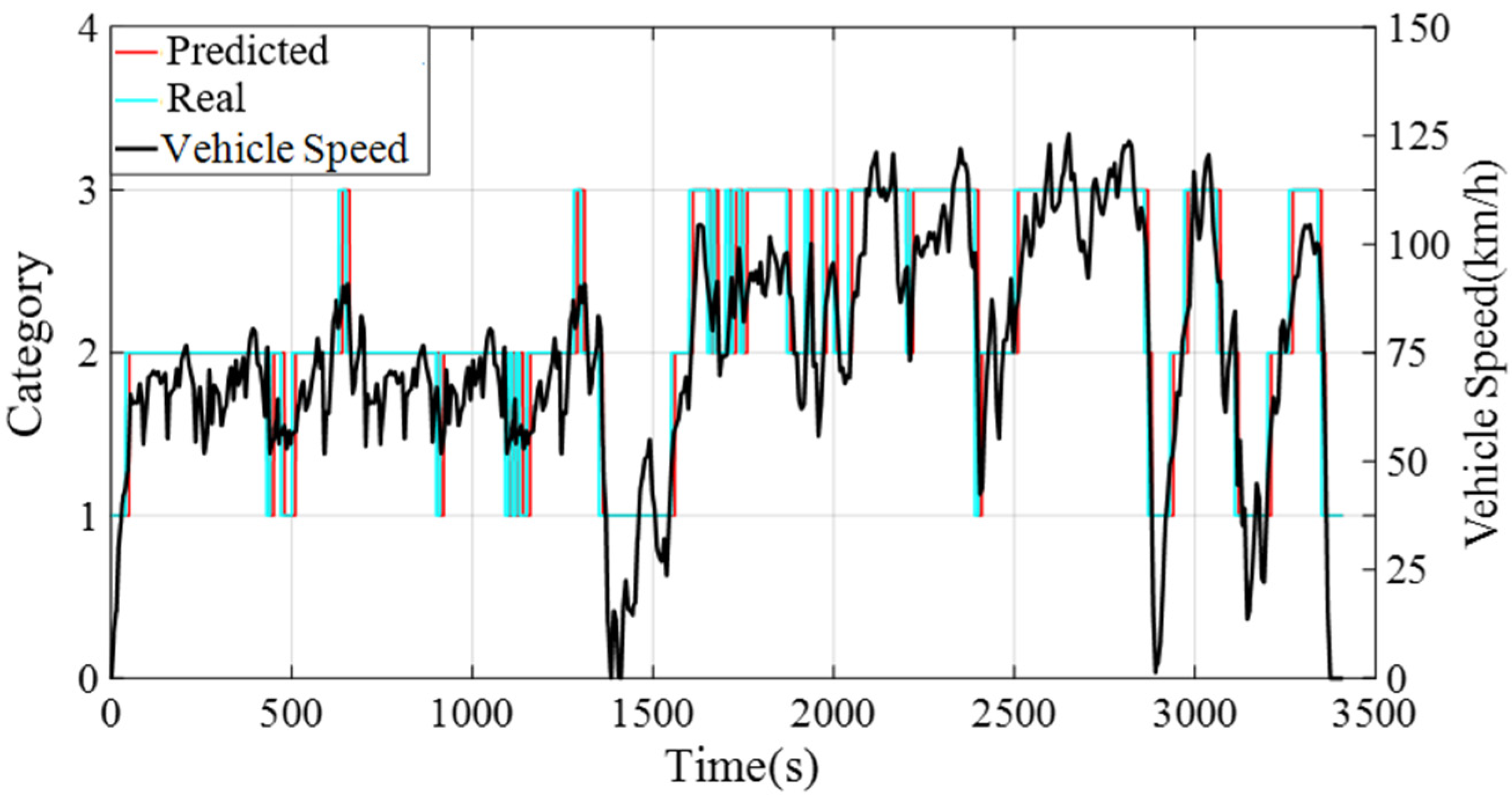
4.1. Acquisition and Analysis of Future Driving Condition Information
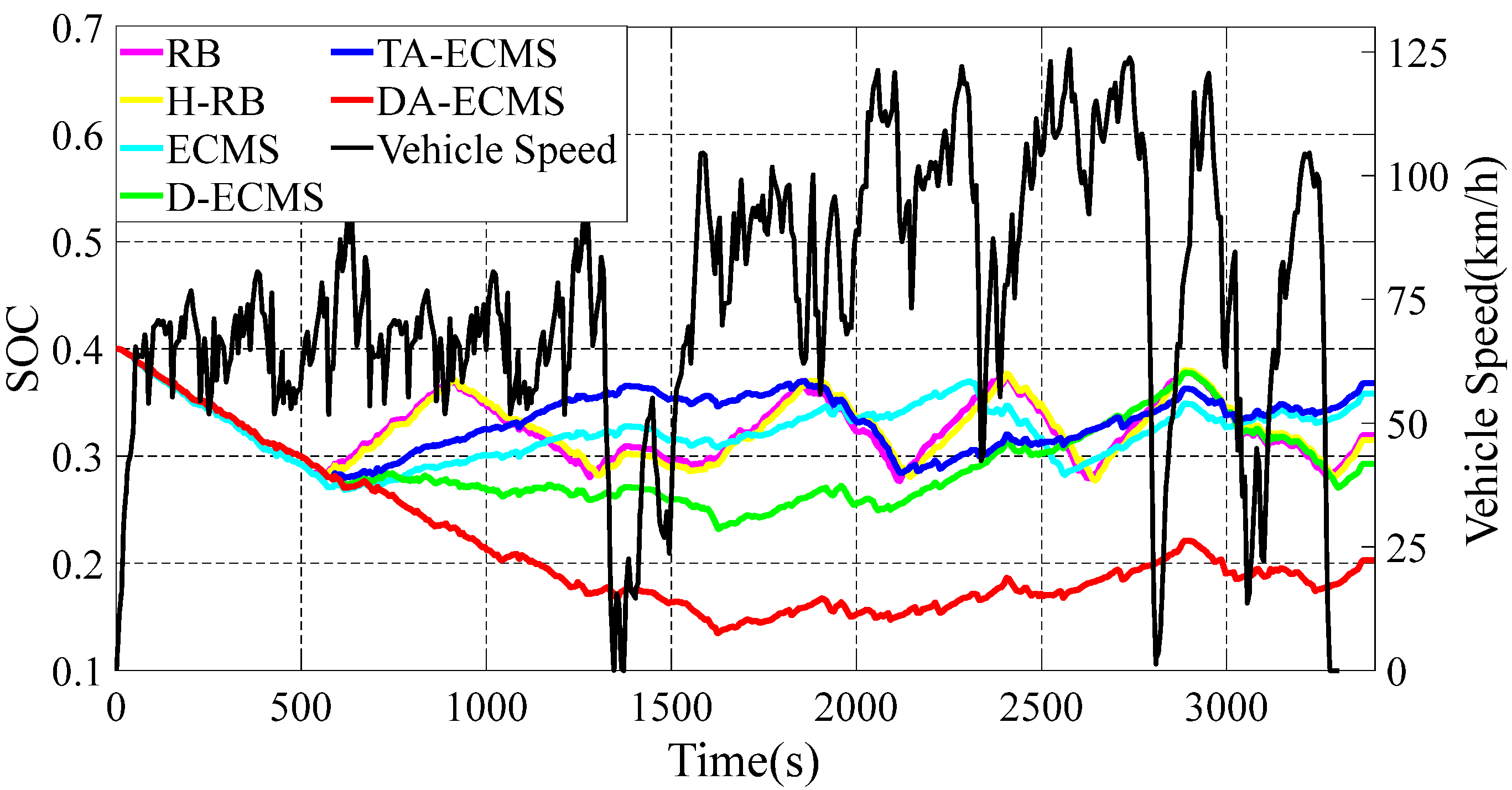
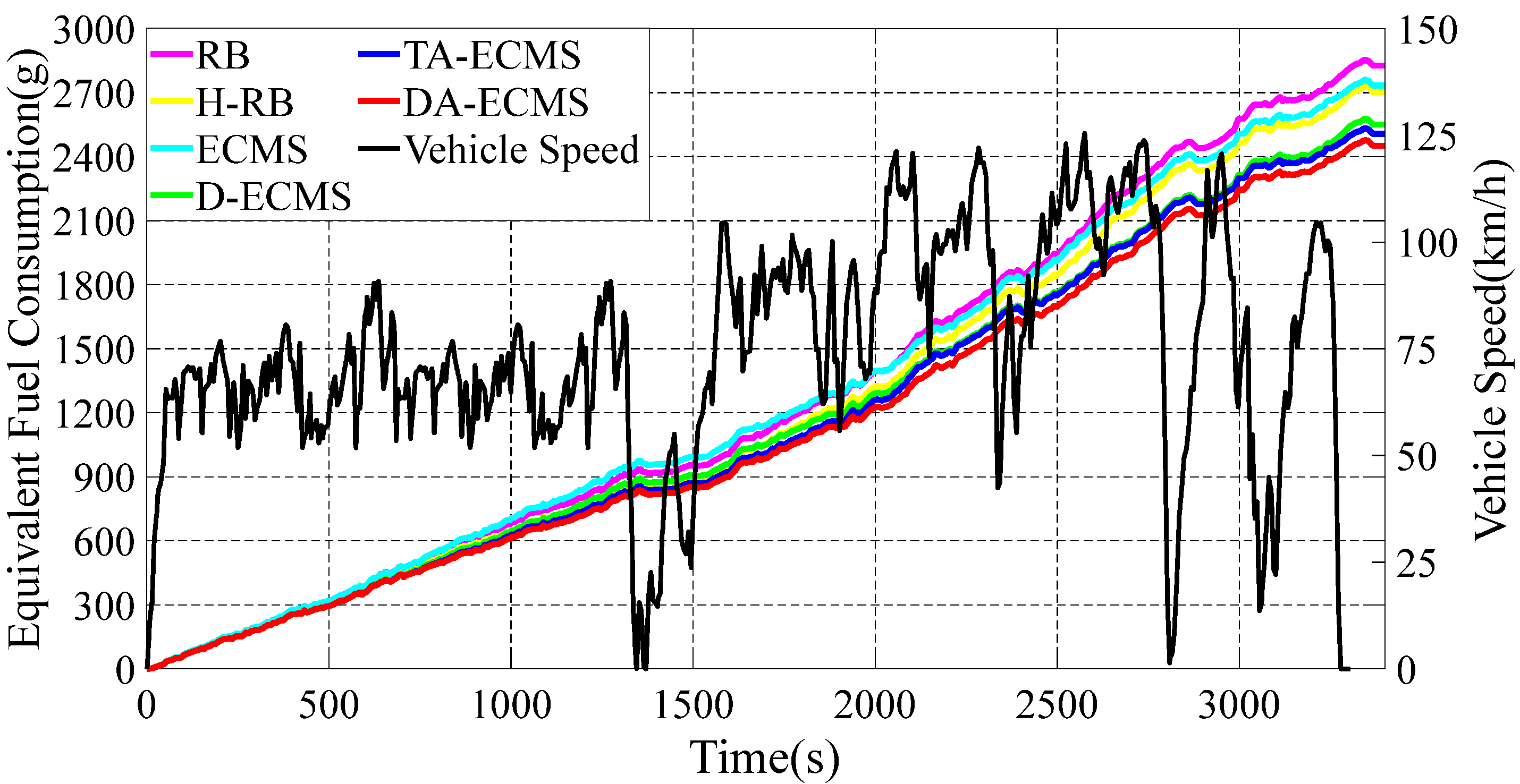
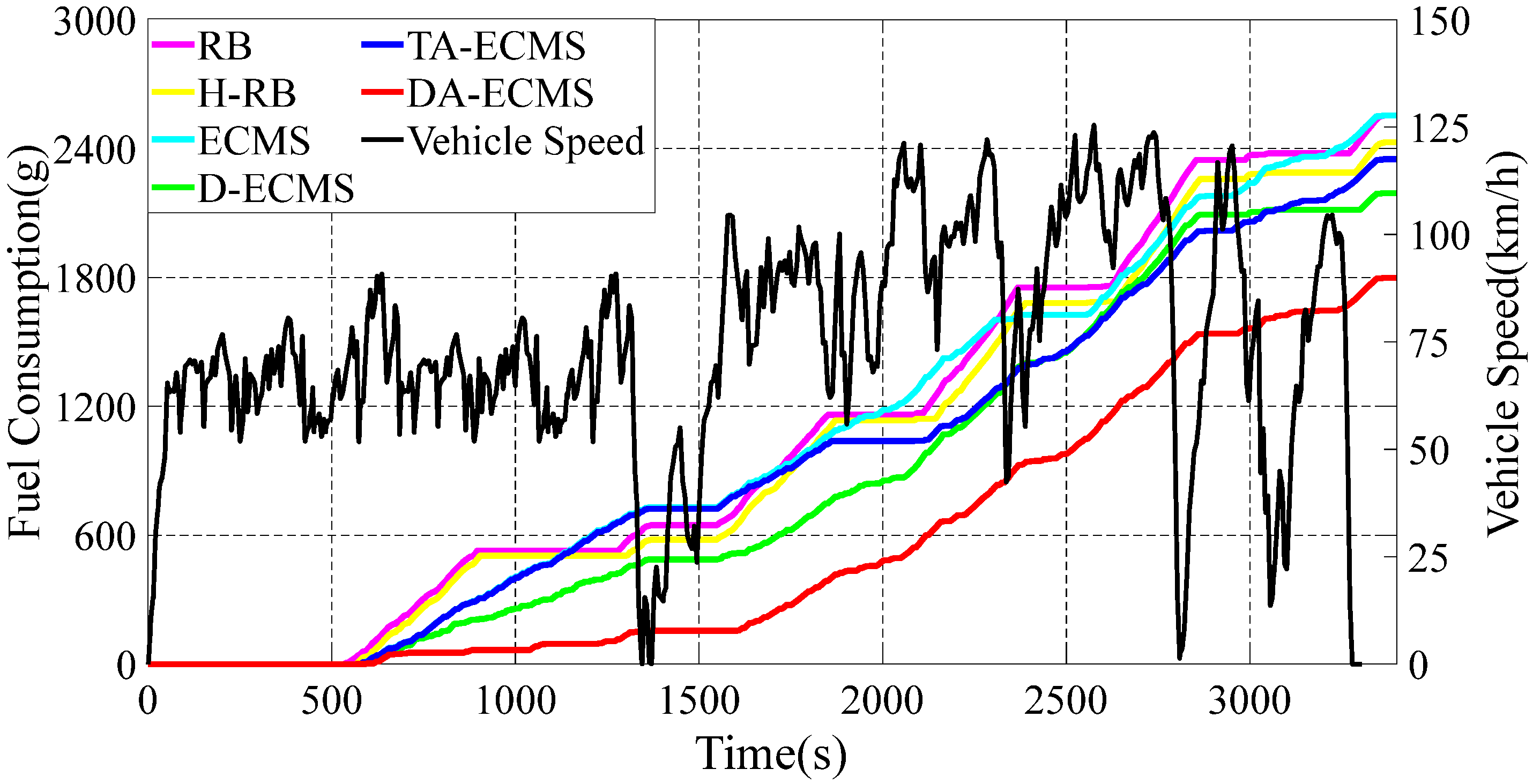
4.2. Comparison and Analysis of SOC, Fuel Consumption and Equivalent Fuel Consumption
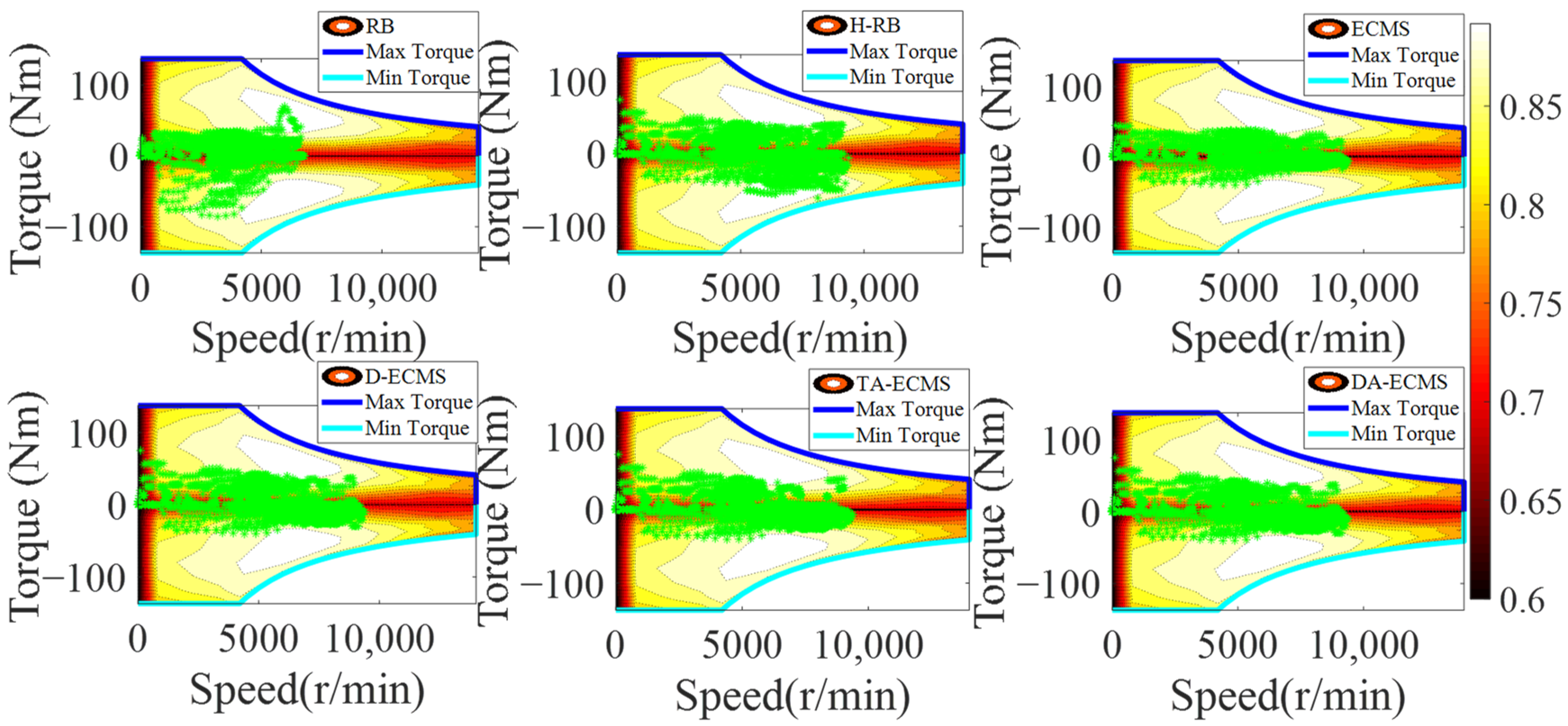
4.3. Qualitative Comparison and Analysis of Engine
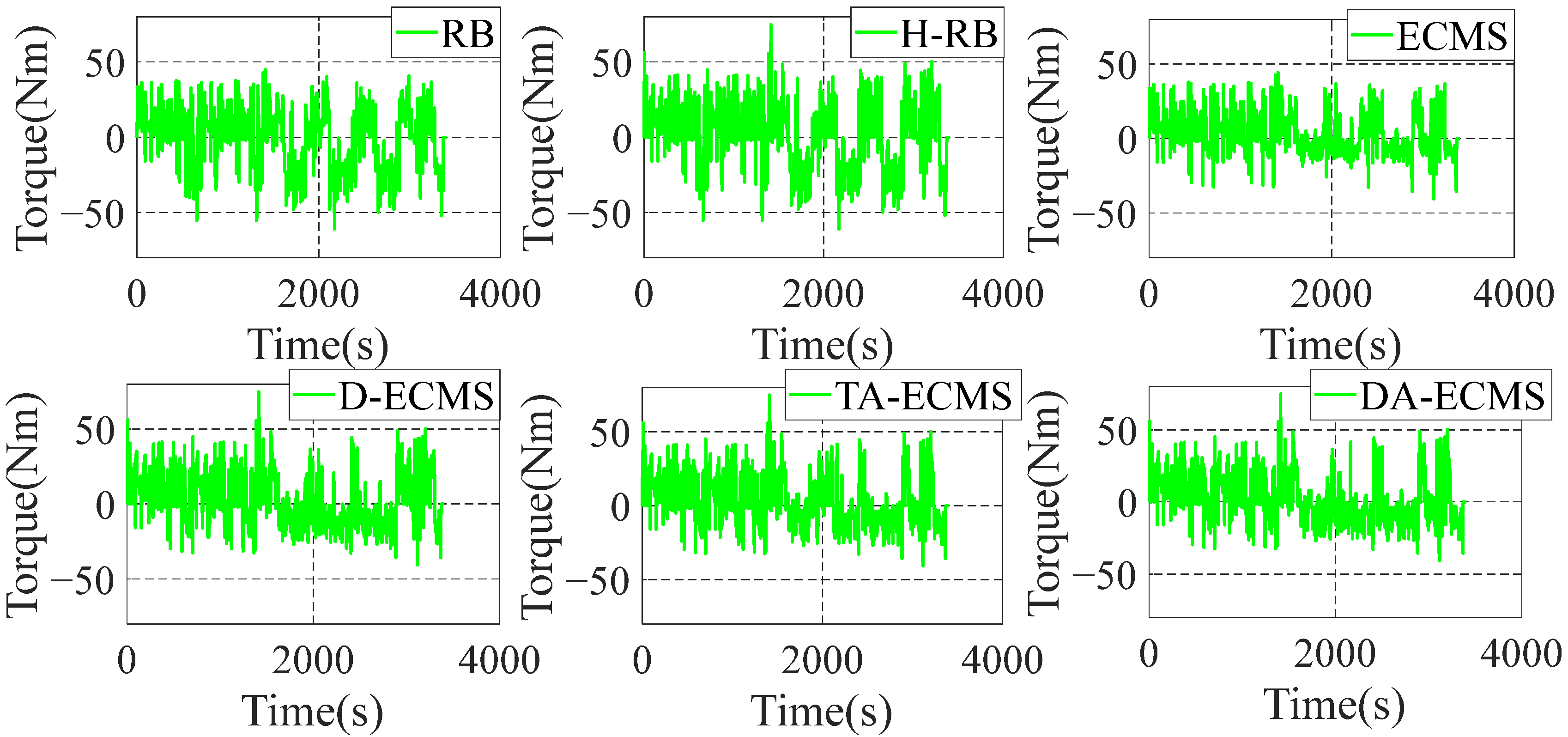
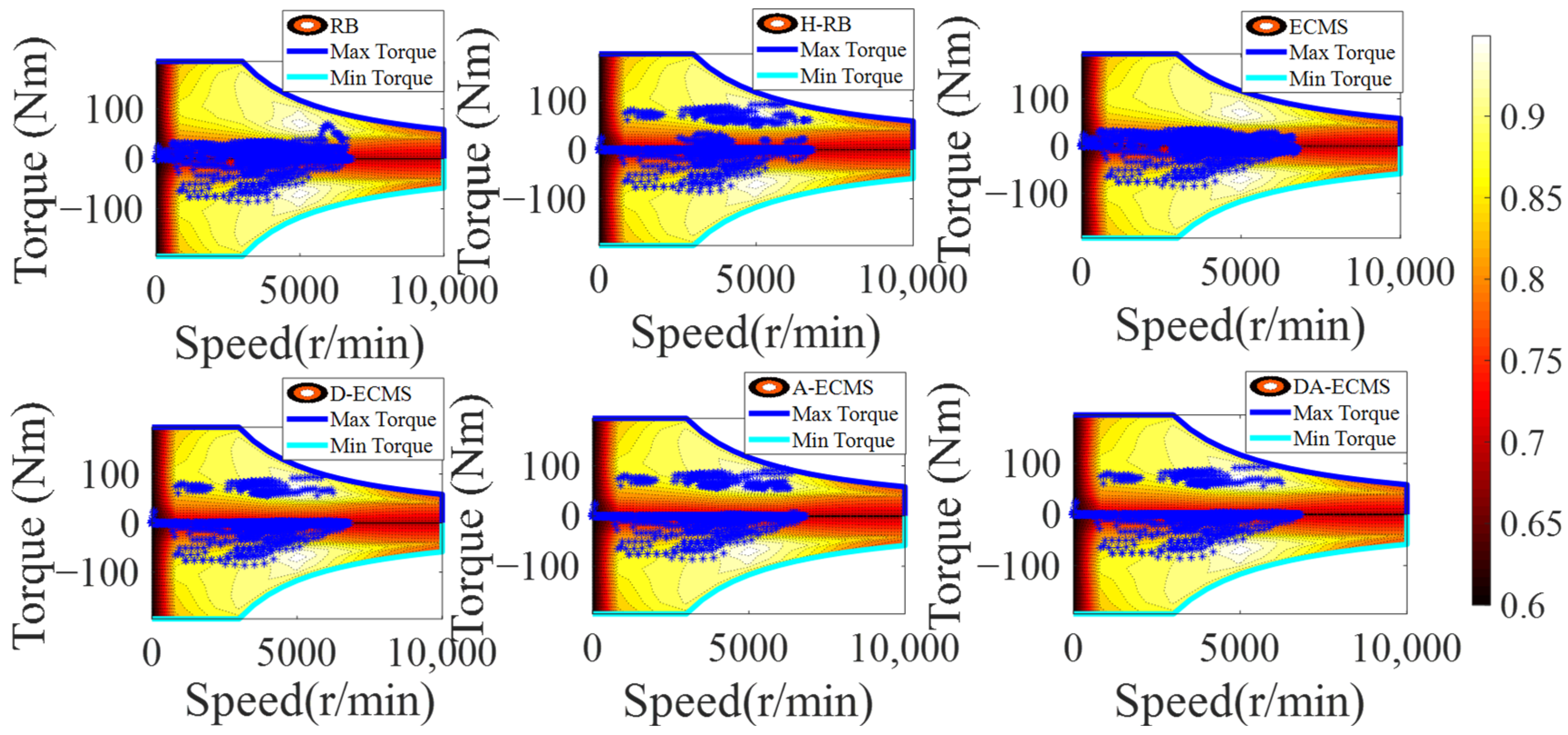
4.4. Qualitative Comparison and Analysis of Front/Rear Motors
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Ma, S.C.; Fan, Y.; Guo, J.F.; Xu, J.H.; Zhu, J. Analysing online behaviour to determine Chinese consumers’ preferences for electric vehicles. J. Clean. Prod. 2019, 229, 244–255. [Google Scholar] [CrossRef]
- Mohr, S.H.; Wang, K.; Ellem, G.; Ward, J.; Giurco, D. Projection of world fossil fuels by country. Fuel 2015, 141, 120–135. [Google Scholar] [CrossRef]
- Dib, W.; Chasse, A.; Moulin, P.; Sciarretta, A.; Corde, G. Optimal energy management for an electric vehicle in eco-driving applications. Control Eng. Pr. 2014, 29, 299–307. [Google Scholar] [CrossRef]
- He, Y.; Zhou, Q.; Makridis, M.; Mattas, K.; Li, J.; Williams, H.; Xu, H. Multiobjective Co-Optimization of Cooperative Adaptive Cruise Control and Energy Management Strategy for PHEVs. IEEE Trans. Transp. Electrif. 2020, 6, 346–355. [Google Scholar] [CrossRef]
- Martinez, C.M.; Hu, X.; Cao, D.; Velenis, E.; Gao, B.; Wellers, M. Energy Management in Plug-in Hybrid Electric Vehicles: Recent Progress and a Connected Vehicles Perspective. IEEE Trans. Veh. Technol. 2017, 66, 4534–4549. [Google Scholar] [CrossRef] [Green Version]
- Xue, Q.; Zhang, X.; Teng, T.; Zhang, J.; Feng, Z.; Lv, Q. A Comprehensive Review on Classification, Energy Management Strategy, and Control Algorithm for Hybrid Electric Vehicles. Energies 2020, 13, 5355. [Google Scholar] [CrossRef]
- Bayindir, K.A.; Gözüküçük, M.A.; Teke, A. A comprehensive overview of hybrid electric vehicle: Powertrain configurations, powertrain control techniques and electronic control units. Energy Convers. Manag. 2011, 52, 1305–1313. [Google Scholar] [CrossRef]
- Schulze, M.; Mustafa, R.; Tilch, B. Energy Management in a Parallel Hybrid Electric Vehicle for Different Driving Conditions. Sae Int. J. Altern. Powertrains 2014, 3, 193–212. [Google Scholar] [CrossRef]
- Zhang, B.; Mi, C.; Zhang, M. Charge-Depleting Control Strategies and Fuel Optimization of Blended-Mode Plug-In Hybrid Electric Vehicles. IEEE Trans. Veh. Technol. 2011, 60, 1516–1525. [Google Scholar] [CrossRef]
- Hemi, H.; Ghouili, J.; Cheriti, A. A real time fuzzy logic power management strategy for a fuel cell vehicle. Energy Convers. Manag. 2014, 80, 63–70. [Google Scholar] [CrossRef]
- Wei, Z.; Xu, J.; Halim, D. HEV power management control strategy for urban driving. Appl. Energy 2017, 194, 705–714. [Google Scholar] [CrossRef]
- Xu, Q.; Luo, X.; Jiang, X.; Zhao, M. Research on double fuzzy control strategy for parallel hybrid electric vehicle based on ga and dp optimization. IET Electr. Syst. Transp. 2018, 8, 144–151. [Google Scholar] [CrossRef]
- Lempert, J.; Vadala, B.; Arshad-Aliy, K.; Roeleveld, J.; Emadi, A. Practical Considerations for the Implementation of Dynamic Programming for HEV Powertrains. In Proceedings of the 2018 IEEE Transportation Electrification Conference and Expo (ITEC), Long Beach, CA, USA, 13–15 June 2018; pp. 755–760. [Google Scholar]
- Zhang, S.; Xiong, R. Adaptive energy management of a plug-in hybrid electric vehicle based on driving pattern recognition and dynamic programming. Appl. Energy 2015, 155, 68–78. [Google Scholar] [CrossRef]
- Patil, R.M.; Kelly, J.; Filipi, Z.; Fathy, H.K. A Framework for the Integrated Optimization of Charging and Power Management in Plug-in Hybrid Electric Vehicles. IEEE Trans. Veh. Technol. 2013, 62, 2402–2412. [Google Scholar] [CrossRef]
- Kim, N.; Cha, S.; Peng, H. Optimal control of hybrid electric vehicles based on pontryagin’s minimum principle. IEEE Trans. Control. Syst. Technol. 2011, 19, 1279–1287. [Google Scholar]
- Lee, W.; Jeoung, H.; Park, D.; Kim, N. An Adaptive Concept of PMP-Based Control for Saving Operating Costs of Extended-Range Electric Vehicles. IEEE Trans. Veh. Technol. 2019, 68, 11505–11512. [Google Scholar] [CrossRef]
- Xie, S.; Xin, Z.; Li, H.; Liu, T.; Wei, L. A study on coordinated optimization on battery capacity and energy management strategy for a plug-in hybrid electric bus. Qiche Gongcheng/Automot. Eng. 2018, 40, 625–631; 645. [Google Scholar]
- Ju, F.; Zhuang, W.; Wang, L.; Zhang, Z. Optimal sizing and adaptive energy management of a novel four-wheel-drive hybrid powertrain. Energy 2019, 187, 116008. [Google Scholar] [CrossRef]
- Ju, F.; Zhuang, W.; Wang, L.; Jiang, Y. A Novel Four-Wheel-Drive Hybrid Electric Sport Utility Vehicle with Double Planetary Gears. IFAC-PapersOnLine 2018, 51, 81–86. [Google Scholar] [CrossRef]
- Qiu, L.H.; Qian, L.J.; Hesam, Z.; Pierluigi, P. Design and optimization of equivalent consumption minimization strategy for 4wd hybrid electric vehicles incorporating vehicle connec-tivity. Sci. China Technol. Sciences 2018, 61, 147–157. [Google Scholar] [CrossRef]
- Zhang, F.; Hu, X.; Langari, R.; Wang, L.; Cui, Y.; Pang, H. Adaptive energy management in automated hybrid electric vehicles with flexible torque request. Energy 2020, 214, 118873. [Google Scholar] [CrossRef]
- Qiang, P.; Wu, P.; Pan, T.; Zang, H. Real-Time Approximate Equivalent Consumption Minimization Strategy Based on the Single-Shaft Parallel Hybrid Powertrain. Energies 2021, 14, 7919. [Google Scholar] [CrossRef]
- Zhao, Y.; Cai, Y.; Song, Q. Energy Control of Plug-In Hybrid Electric Vehicles Using Model Predictive Control with Route Preview. IEEE/CAA J. Autom. Sin. 2018, 8, 1948–4854. [Google Scholar] [CrossRef] [Green Version]
- Chen, H.; Lin, C.; Xiong, R.; Shen, W. Model predictive control based real time energy management for hybrid energy storage system. CSEE J. Power Energy Syst. 2021, 7, 862–874. [Google Scholar]
- Guo, L.; Gao, B.; Gao, Y.; Chen, H. Optimal Energy Management for HEVs in Eco-Driving Applications Using Bi-Level MPC. IEEE Trans. Intell. Transp. Syst. 2017, 18, 2153–2162. [Google Scholar] [CrossRef]
- Zhang, Y.; Huang, Y.; Chen, Z.; Li, G.; Liu, Y. A Novel Learning-Based Model Predictive Control Strategy for Plug-In Hybrid Electric Vehicle. IEEE Trans. Transp. Electrif. 2021, 8, 23–35. [Google Scholar] [CrossRef]
- Zhang, Y.; Liang, C.; Fu, Z.; Chong, G.; Lei, X. An improved adaptive equivalent consumption minimization strategy for parallel plug-in hybrid electric vehicle. Proc. Inst. Mech. Eng. Part D J. Auto-Mob. Eng. 2018, 233, 095440701880560. [Google Scholar] [CrossRef]
- Tang, X.; Duan, Z.; Hu, X.; Pu, H.; Cao, D.; Lin, X. Improving Ride Comfort and Fuel Economy of Connected Hybrid Electric Vehicles Based on Traffic Signals and Real Road Information. IEEE Trans. Veh. Technol. 2021, 70, 3101–3112. [Google Scholar] [CrossRef]
- Xia, J.; Wang, F.; Xu, X. A Predictive Energy Management Strategy for Multi-mode Plug-in Hybrid Electric Vehicle based on Long short-term Memory Neural Network. IFAC-PapersOnLine 2021, 54, 132–137. [Google Scholar] [CrossRef]
- Park, B.; Bae, S.H.; Jung, B. Speed Prediction of Urban Freeway Using LSTM and CNN-LSTM Neural Network. J. Korea Inst. Intell. Transp. Syst. 2021, 20, 86–99. [Google Scholar] [CrossRef]
- Sun, C.; Hu, X.; Moura, S.J.; Sun, F. Velocity Predictors for Predictive Energy Management in Hybrid Electric Vehicles. IEEE Trans. Control Syst. Technol. 2015, 23, 1197–1204. [Google Scholar] [CrossRef]
- Shin, J.; Yeon, K.; Kim, S.; Sunwoo, M.; Han, M. Comparative Study of Markov Chain with Recurrent Neural Network for Short Term Velocity Prediction Implemented on an Embedded System. IEEE Access 2021, 9, 24755–24767. [Google Scholar] [CrossRef]
- Caiazzo, B.; Coppola, A.; Petrillo, A.; Santini, S. Distributed Nonlinear Model Predictive Control for Connected Autonomous Electric Vehicles Platoon with Distance-Dependent Air Drag Formulation. Energies 2021, 14, 5122. [Google Scholar] [CrossRef]
- Maia, R.; Silva, M.; Araújo, R.; Nunes, U. Electrical vehicle modeling: A fuzzy logic model for regenerative braking. Expert Syst. Appl. 2015, 42, 8504–8519. [Google Scholar] [CrossRef]
- Sm, A.; Smm, B.; Al, A. Grey wolf optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Operating Modes | Illustration |
|---|---|
| Pure electric mode | The battery provides all the power for the front/rear motors to drive the vehicle, and the engine and generator are in shutdown state. |
| Series mode | The engine drives the generator to provide electric energy for the front/rear motors, and the battery also provides electric energy output. |
| Parallel mode | The clutch is closed, and the engine directly drives the vehicle. The front/rear motors assist the engine to drive the vehicle. |
| Parameter | Unit | Value |
|---|---|---|
| Vehicle Mass | kg | 1860 |
| Vehicle Maximum velocity | km/h | 170 |
| Wheel rolling radius | m | 0.35 |
| Frontal area | m2 | 2 |
| Engine maximum power | kW @ rpm | 110 @ 5200 |
| Engine maximum torque | Nm @ rpm | 200 @ 5200 |
| Front motor maximum power | kW | 60 |
| Front motor maximum torque | Nm | 137 |
| Rear motor maximum power | kW | 61 |
| Rear motor maximum torque | Nm | 195 |
| Battery capacity | kWh | 15 |
| Battery rated voltage | V | 300 |
| Driving Condition Category Characteristics | Unit | Symbol |
|---|---|---|
| Idle time/Total time | % | |
| Maximum speed | m/s | |
| Maximum acceleration | m/s2 | |
| Maximum deceleration | m/s2 | |
| Average acceleration | m/s2 | |
| Average deceleration | m/s2 | |
| Acceleration time/Total time | % | |
| Deceleration time/Total time | % | |
| Average speed (Excluding parking time) | m/s | |
| Standard deviation of speed | m/s | |
| Standard deviation of acceleration | m/s2 | |
| Standard deviation of deceleration | m/s2 |
| Energy Management Strategy | Illustration |
|---|---|
| RB | The RB strategy is adopted to optimize the energy management of the power sources, and power components adopt fixed energy distribution ratio. |
| H-RB | The RB strategy is adopted to optimize the energy management of the power sources, and power components adopt ECMS to optimize the energy management. |
| ECMS | The ECMS is adopted to optimize the energy management of the power sources, and power components adopt fixed energy distribution ratio. |
| D-ECMS | Both power sources and power components adopt the ECMS to optimize the energy management. |
| TA-ECMS | Under the method of total optimizing the initial value of equivalent factors, both power sources and power components adopt the ECMS to optimize the energy management. |
| DA-ECMS | Under the method of instantaneous optimizing the initial value of equivalent factors, both power sources and power components adopt the ECMS to optimize the energy management. |
| Total Sampling Time (s) | Same Category Time (s) | Different Category Time (s) | Accuracy Rate |
|---|---|---|---|
| 3410 | 3362 | 48 | 98.6% |
| Control Strategy | Terminal | Equivalent Fuel Consumption (g) | Economy (Relative to RB) |
|---|---|---|---|
| RB | 0.320 | 2826 | |
| H-RB | 0.315 | 2703 | 4.35% |
| ECMS | 0.358 | 2733 | 3.29% |
| D-ECMS | 0.293 | 2549 | 9.80% |
| TA-ECMS | 0.368 | 2506 | 11.32% |
| DA-ECMS | 0.203 | 2450 | 13.31% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, J.; Guo, Z.; Chu, L.; Zhao, D.; Hu, J.; Hou, Z. A Dual-Adaptive Equivalent Consumption Minimization Strategy for 4WD Plug-In Hybrid Electric Vehicles. Sensors 2022, 22, 6256. https://doi.org/10.3390/s22166256
Guo J, Guo Z, Chu L, Zhao D, Hu J, Hou Z. A Dual-Adaptive Equivalent Consumption Minimization Strategy for 4WD Plug-In Hybrid Electric Vehicles. Sensors. 2022; 22(16):6256. https://doi.org/10.3390/s22166256
Chicago/Turabian StyleGuo, Jianhua, Zhiqi Guo, Liang Chu, Di Zhao, Jincheng Hu, and Zhuoran Hou. 2022. "A Dual-Adaptive Equivalent Consumption Minimization Strategy for 4WD Plug-In Hybrid Electric Vehicles" Sensors 22, no. 16: 6256. https://doi.org/10.3390/s22166256
APA StyleGuo, J., Guo, Z., Chu, L., Zhao, D., Hu, J., & Hou, Z. (2022). A Dual-Adaptive Equivalent Consumption Minimization Strategy for 4WD Plug-In Hybrid Electric Vehicles. Sensors, 22(16), 6256. https://doi.org/10.3390/s22166256