1. Introduction
With the increasingly serious energy crisis [
1,
2,
3], plug-in hybrid electric vehicles (PHEVs) have become an effective solution to alleviate the energy problem, with excellent energy-saving characteristics. The unique structure of the multi-energy system endows PHEVs with extraordinary energy-saving potential [
4,
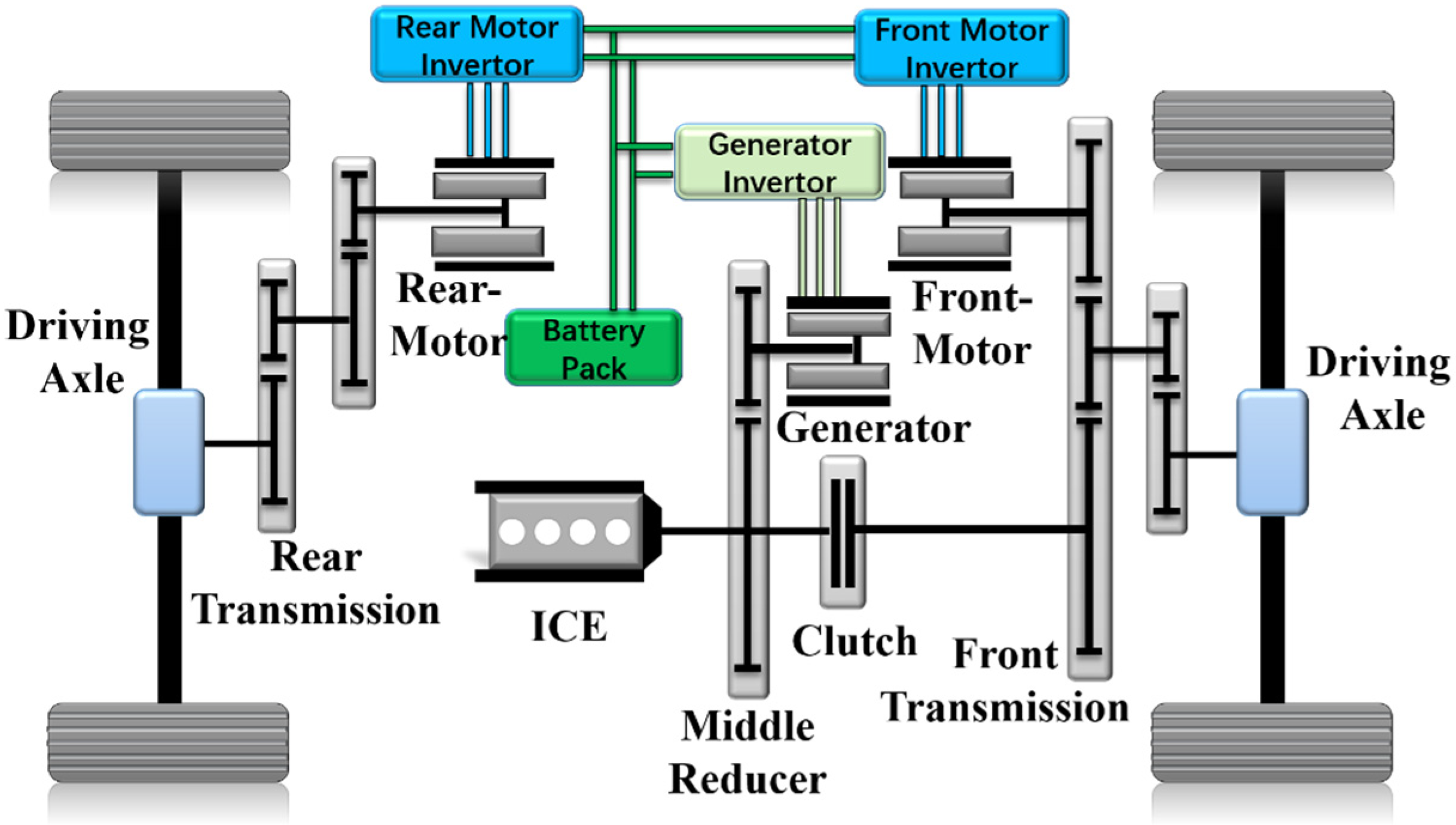
5]. In PHEVs, the four-wheel-drive PHEV (4WD PHEV) mostly adopts the structure of split-axle four-wheel drive, and the multi-power sources and the multi-power components in the front/rear axles are coupled to form a more complex nonlinear energy system. However, it is a problem to be solved to explore reasonable energy management strategies, optimally manage the multi-energy system and realize the maximum energy-saving potential.
At present, researchers have made remarkable progress in energy management, and the existing energy management strategies are mainly divided into the two following categories [
6]: rule-based (RB) energy management strategies [
7,
8,
9] and optimization-based energy management strategies [
10,
11,
12]. Rule-based strategies mainly adopt fixed thresholds and fuzzy logic methods to realize the energy management for the vehicle and the strategies can be equipped with simple structure, mild calculation load and easy online application. However, the RB strategy was developed through expert knowledge and is rather sensitive to driving conditions. In addition, the high-performance continuous control cannot be achieved in actual driving, and the adaptability and robustness of driving conditions are poor. The energy-saving potential of the 4WD PHEV cannot be fully released.
Optimization-based energy management strategies are further divided into global optimization based and instantaneous optimization based [
6]. Global optimization-based strategies, such as dynamic programming (DP) [
13,
14,
15] and Pontryagin’s minimum principle (PMP) [
16,
17,
18], can solve the best global control sequence by traversal search under global prior information. However, the global optimization-based strategies are difficult to apply in practice projects because of the heavy computational load. In addition, it is difficult to accurately obtain the future driving condition information in the actual driving, resulting in poor accuracy in the control sequence. The accurate acquisition of prior information and the calculation load in the control sequence have become thorny problems in practice projects. As the 4WD PHEV has a complex energy system composed of multi-power sources and multi-power components, the global-optimization-based strategies fall into the curse of dimensionality for the complex multi-energy system. Existing energy management research for the 4WD PHEV, the global-optimization-based strategies, is only adopted to solve the optimal management of the single energy system [
19,
20,
21]. In addition, prior information of the driving conditions cannot be accurately obtained, resulting in the global optimization strategy unable to give full play to the energy-saving potential of the 4WD PHEV. Instantaneous-optimization-based strategies, including equivalent consumption minimization strategy (ECMS) [
21,
22,
23] and model predictive control (MPC) [
24,
25], have the adaptability and robustness of driving conditions and the control effect of the vehicle is considered at the same time. The complex nonlinear energy system puts forward higher requirements for the energy management strategy in the 4WD PHEV; therefore, instantaneous-optimization-based strategies have become a better energy management strategy, with good real-time control and economic optimality for the 4WD PHEV.
In the energy system of the 4WD PHEV, energy management is important control technology for multiple energy sources. In order to give full play to the energy-saving potential in the 4WD PHEV, the energy management strategy needs to account for different constraints from the powertrain, driving conditions and the operating states of the vehicle, and weighs the economy and real time of control. As an instantaneous-optimization-based strategy, the MPC strategy takes into account the prior information of future driving conditions and adopts the optimization algorithm to complete the optimal decision-making in the rolling time domain. In simple energy systems, the MPC strategy can realize better energy optimization management and take into account real-time applications and quasi-optimality [
26]. However, with an increase in the future prior information dimensions, control step size and control dimensions, the real time and control effect all show a significantly downward trend. In the complex nonlinear energy system of the 4WD PHEV, the coordination output of multiple energy sources increases the control dimension and the calculation load in the MPC, resulting in a control delay and affecting the control effect of the vehicle.
By introducing an equivalent factor, the ECMS equals the consumption of the electric energy to the fuel consumption and solves the local optimal control. According to the current power demand in the vehicle and the operating states of the vehicle components, the optimal energy control sequence is solved at the current time. The ECMS ensures real-time control and economic effect and becomes the research focus of online application. With further research on the ECMS in the energy management strategies of the 4WD PHEV, some experts and scholars have realized the optimal management of energy by introducing an equivalent factor in the energy system of the 4WD PHEV [
19,
21]. However, in the current energy management strategy research of the 4WD PHEV, the impact of energy management in the power components of the 4WD PHEV on vehicle economy has not been deeply studied and analyzed. The ECMS still needs further exploration to develop the energy-saving potential in the 4WD PHEV. In addition, the value of equivalent factor directly affects the economy of the vehicle as an important parameter of the ECMS. The optimization ability of fixed equivalent factor is inconsistent under different driving conditions and the stable economic optimal control is difficult to guarantee. In the current research, the adaptive equivalent consumption minimization strategy (A-ECMS) is proposed based on the ECMS theory [
27,
28]. The A-ECMS adopts the historical speed information of the vehicle to predict the future speed information and adjusts the value of equivalent factor to improve the adaptability of driving conditions according to the prior obtained speed information [
29,
30]. However, the future speed information is variable in time and space, so it is difficult to establish a model to accurately predict the future speed information, even though some methods, such as the convolutional neural network (CNN) [
31], the backpropagation neural network (BP-NN) [
32] and the Markov chain (MC) [
33], have excellent speed prediction effects under some specific driving conditions. However, the accuracy of speed prediction decreases under complex and changeable driving conditions and the speed prediction increases the calculation load, resulting in a poor control effect and poor real-time control of the A-ECMS. Therefore, reducing the unreasonable adjustment in the equivalent factor caused by the inaccuracy of obtaining future prior information is a thorny problem to be solved in the application of the A-ECMS.
In this context, this paper presents a novel energy management strategy for 4WD PHEV, DA-ECMS. The DA-ECMS adopts a multi-layer control architecture to optimize and manage the collaborative output of the multi-energy system. The high level adopts the method of multiple algorithm fusion to complete the classification of driving conditions and the optimization of multi-dimensional equivalent factors offline and completing the identification of driving conditions and the matching of multi-dimensional equivalent factors online. The lower level realizes the optimal management of the multi-energy system in the 4WD PHEV and completing the collaborative control in the power sources’ fuel-electric system (the system composed of engine, generator and battery) and the front/rear axles’ electric driving system. The DA-ECMS comprehensively accounts for the powertrain, driving conditions and the operating states of the vehicle, and balances the economy and real time of control. It gives full play to the energy-saving potential of the 4WD PHEV.
The contributions of this paper are shown as follows:
A novel 4WD PHEV energy management strategy, DA-ECMS, is proposed, realizing multi-layer control architecture, combining condition category awareness and the multi-energy system.
The collaborative optimization management of the power source fuel-electric system and the front/rear axle electric drive system is completed, giving full play to the energy-saving potential of the 4WD PHEV.
The classification of driving conditions and the optimization of multi-dimensional equivalent factors by SOM and GWO are completed offline, and the identification of driving conditions and the matching of multi-dimensional equivalent factors are realized online. The adaptability of the DA-ECMS is improved under different driving conditions.
This study is organized as follows:
Section 2 presents an introduction to 4WD PHEV models.
Section 3 elaborates the novel methodology of energy management strategy for the 4WD PHEV.
Section 4 analyzes and compares simulation results. The conclusions are given in
Section 5.
3. Methodology
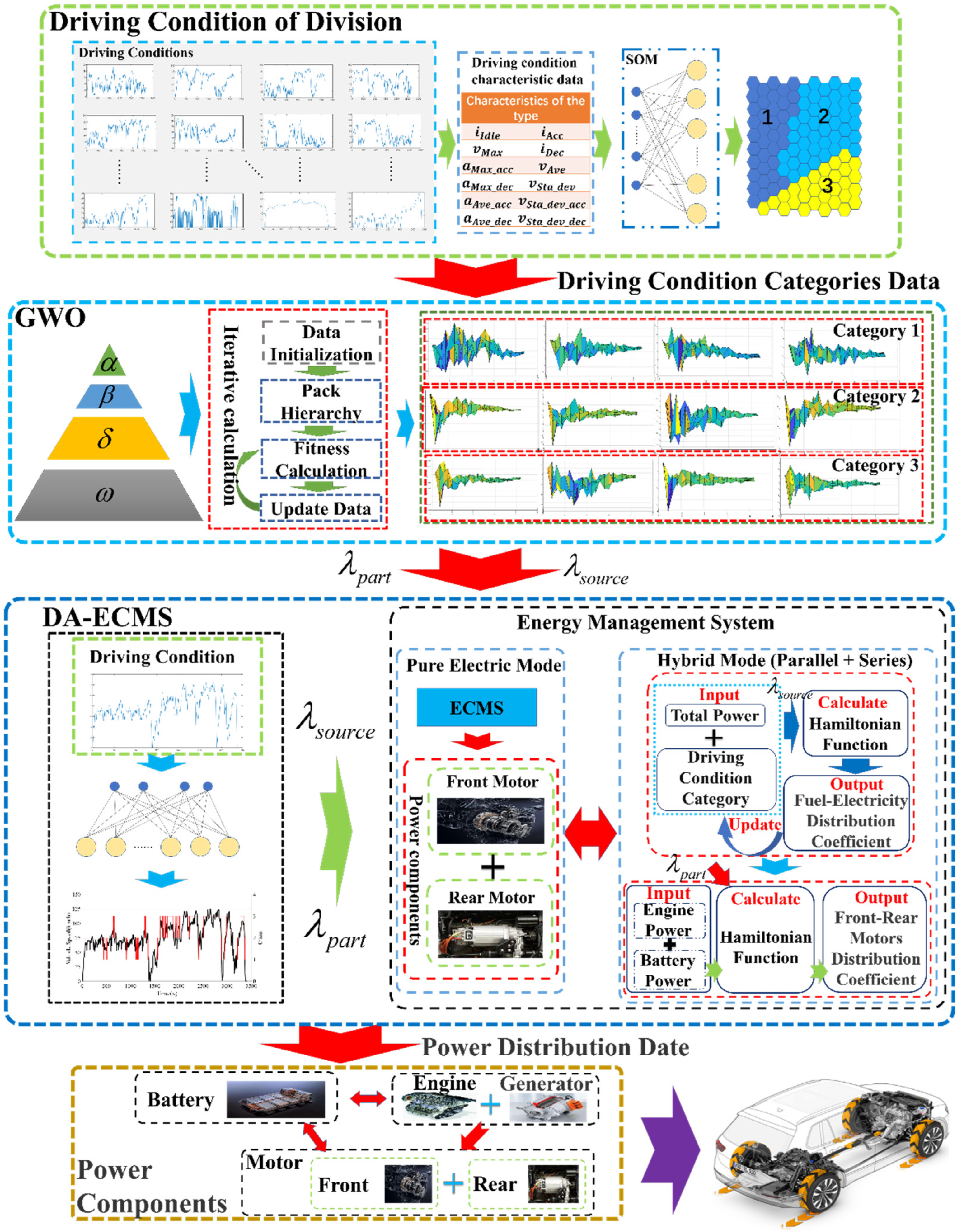
In this paper, for the complex nonlinear energy system composed of multi-power sources and multi-power components in the 4WD PHEV, a multi-layer energy management control architecture is proposed to combine the prior information of driving conditions and multi-energy optimization management, and gives full play to the energy-saving potential of the 4WD PHEV. The architecture is shown in
Figure 5. The high level of control architecture mainly improves the adaptability in the energy management strategy. Self-organizing neural network (SOM) and grey wolf optimizer (GWO) algorithms are adopted to complete the classification of driving conditions and optimization of multi-dimensional equivalent factors offline, realizing the identification of driving conditions and adjustment of equivalent factors online.
The low level of control architecture adopts the DA-ECMS to optimize and manage the collaborative energy output of multiple energy systems in real time. The DA-ECMS realizes the energy distribution of multi-power sources on the front axle of the 4WD PHEV, such as engine, generator and battery. The optimal management between the front/rear motors is completed at the same time. The DA-ECMS balances the economy and real time of control and releases the energy-saving potential of multi-degrees-of-freedom energy system in the 4WD PHEV.
3.1. Classification and Online Identification of Driving Conditions Based on SOM
The driving condition characteristics represent the operating state of the vehicle and the future characteristics are accurately and quickly estimated to provide powerful data basis for energy management strategies. There is a strong correlation between road conditions and driving conditions, so this paper mainly adopts the driving speed characteristics of the vehicle to represent the driving conditions and road conditions. At the same time, the driving intention of the driver is also directly reflected by the driving speed.
As an unsupervised learning method, SOM is composed of the input layer and the competition layer. By independently searching for the inherent laws and essential attributes in the samples, SOM adaptively changes the network parameters and structure. A single neuron in the SOM does not play a decisive role and it relies on the synergy of multiple neurons to complete pattern classification. The structure is shown in
Figure 6.
In this paper, the characteristics of driving conditions are represented by the average speed, average acceleration, average deceleration and other parameters. The parameters are shown in
Table 3. The training set in SOM is constructed from massive dataset of driving condition characteristics to divide into three different categories. In order to provide real-time and accurate driving condition categories for the vehicle energy management strategy, the trained SOM is adopted to identify the category in real time. SOM adopts Euclidean distance to match the best nodes and updates the weight of nodes within the neighborhood, as shown in Equations (13) and (14).
where
is the neighborhood function and
is the learning rate.
3.2. Optimization of Equivalent Factors Parameters Based on GWO
Based on the principle of grey wolves preying, the grey wolf optimizer (GWO) as a swarm intelligence optimization algorithm was proposed by Mirjalili et al. in 2014 [
36]. GWO has the advantages of strong convergence, few parameters, simple structure and easy implementation. The equivalent factors are optimized for different driving conditions in this paper. According to the different operating states and modes in the 4WD PHEV, the values of four equivalent factors in CD-CS series and parallel are optimized, respectively. In the GWO algorithm, the position parameters of the grey wolf represent the equivalent factors in the optimization process and the equivalent fuel consumption is the fitness value of the grey wolf’s current position, so less equivalent fuel consumption means better fitness.
GWO has strict hierarchy of social dominance and it is divided into four classes
and
according to different responsibilities, as shown in
Figure 7.
The GWO mainly includes four steps: social hierarchy, tracking, rounding up and hunting, as shown in
Figure 8. Firstly, the fitness of each wolf is calculated to construct social hierarchy. Secondly, the three wolves with the best fitness are selected as
and
, respectively, and the remaining wolves are marked as
. Finally, with the iteration of the wolves, the alpha wolf (
) leads the wolves to gradually approach and hunt the prey. The mathematical expressions of this process are shown in Equation (15).
where
is the number of iterations;
and
are the synergy coefficient matrix;
is the location information of the prey; and
is the location information of the wolves. In the iterative process,
gradually decreases from 2 to 0;
and
are random variables in [0, 1].
In the process of hunting, the wolves can identify potential prey through the guidance of
and
. In order to provide wolves with a good ability to identify potential prey, the fitness of grey wolves is updated during each iteration calculation, and the three wolves with the best fitness are selected as
and
respectively. According to the position information of
and
, the position information of the remaining wolves is updated at the next moment. The process expressions are shown in Equations (16) and (17).
where
,
and
are the location information of
and
, respectively;
is the updated position of the grey wolf;
is the current position of the grey wolf;
,
and
are the distances between the current grey wolf and
,
, respectively; |A| > 1 means that the grey wolves are in scattered mode to search for prey; and |A| < 1 means that the grey wolves focus on hunting for prey.
GWO adopts scattered search for location information of the prey and the prey is locked and captured as the number of iterations increases. In the process of establishing the GWO model, |A| > 1 means that the wolves are scattered to search for prey and increases the search for the global optimal solution. , as a random value of [0, 2], has the effect of random weight in the optimization process to avoid falling into the local optimal solution. Finally, the equivalent factors are optimized by GWO under different driving condition categories.
3.3. Collaborative Multi-Energy Output Based on DA-ECMS
Multi-power components and multi-energy sources constitute a complex multi-energy system in the 4WD PHEV, and the optimal management of the multi-energy system directly affects the driving economy. In the 4WD PHEV, the front/rear motors directly drive the wheels as the power components and the difference of maps between the front/rear motors, so the rational distribution of energy is the key to improving the economy of the vehicle. In this paper, the DA-ECMS is adopted to complete the optimal management of the multi-energy system and the control architecture is shown in
Figure 9.
The DA-ECMS optimizes the distribution of energy output between power sources, while the front/rear axles electric driving system is optimally managed. In order to give full play to the energy-saving potential of the 4WD PHEV, the equivalent factors are adaptively adjusted according to different driving condition categories to improve the driving condition adaptability and robustness and improve the economy of the vehicle. The energy distribution optimization between power sources is shown in Equation (18).
where
is the instantaneous equivalent fuel consumption at time
t;
is the required power of the vehicle at time
t;
is the equivalent factors of the power sources;
is the fuel consumption at time
t;
is the electric energy consumption at time
t; and
is the power source energy output distribution ratio.
The value of directly affects the energy distribution between power sources and different driving conditions have different requirements for . In complex and changeable driving conditions, the single value of cannot meet the requirements. According to different driving conditions and modes of the vehicle, the value of is adaptively adjusted to improve economy.
Power sources are the energy source of power components and optimize the energy distribution among power components, which can effectively improve the utilization rate. The optimal distribution relation is shown in Equations (19) and (20).
where
is the instantaneous equivalent fuel consumption of the front/rear motors at time
t;
is the total power supplied by the power sources to the front/rear motors at time
t;
is the equivalent factors of the power components;
is the electric energy consumption of the front motor at time
t;
is the electric energy consumption of the rear motor at time
t;
is the efficiency of the front motor;
is the efficiency of the rear motor;
is the transmission efficiency of the electric drive system; and
is the power component energy output distribution ratio at time
t.
In order to simplify the non-essential factors in the vehicle dynamics model and reduce the calculated load, only the influence of acceleration resistance power, air resistance power and rolling resistance power on the vehicle are considered in this paper. Equation (1) can be rewritten to obtain
, as shown in Equation (21).
where
is the power of the accelerate resistance;
is the power of the rolling resistance;
is the power of the air resistance; and
is the vehicle speed (m/s).
Under the requirement of the vehicle, the optimal economy of power sources is realized and the power components in the electric driving system at the front/rear axles are reasonably distributed to improve the electric energy consumption rate at the same time. In this paper, the DA-ECMS adopts the method of multiple distribution to simultaneously complete the collaborative optimal management of Equations (18) and (19), as shown in Equation (22).
The Hamiltonian function is established to solve the minimum value of the objective function, as shown in Equation (23). In order to solve the optimal control sequence, the general mathematical expression is shown in Equation (24).
where
is the optimal control sequence of the power sources at time
t;
is the optimal control sequence of the power components at time
t;
and
are the minimum and maximum distribution ratio of the power source energy output at time
, respectively;
and
are the minimum and maximum distribution ratio of the power components energy output at time
, respectively;
and
are the minimum and maximum equivalent factors of the power sources, respectively; and
and
are the minimum and maximum equivalent factors of the power components, respectively.
In a finite set of Hamilton function, solving the control sequence
makes the Hamilton function obtain the minimum value. The
is the optimal control sequence and the expression is shown in Equation (25).
where
and
are the minimum and maximum power of the front motor at time
, respectively;
and
are the minimum and maximum power of the rear motor at time
, respectively;
and
are the minimum and maximum power of the engine at time
, respectively; and
and
are the minimum and maximum
of the battery, respectively.
The DA-ECMS realizes the optimization management of the multi-energy system and completes the energy management of multi-power sources and multi-power components by solving .The relationship between driving condition categories and optimal equivalent factors are established offline and equivalent factors are adaptively adjusted by identifying the driving condition category online to improve the adaptability and robustness. In complex driving conditions, the DA-ECMS can effectively improve the economy of the 4WD PHEV.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}