
Dynamic Response of CFRP Reinforced Steel Beams Subjected to Impact Action Based on FBG Sensing Technology

 ,
,  ,
,
Abstract
:1. Introduction
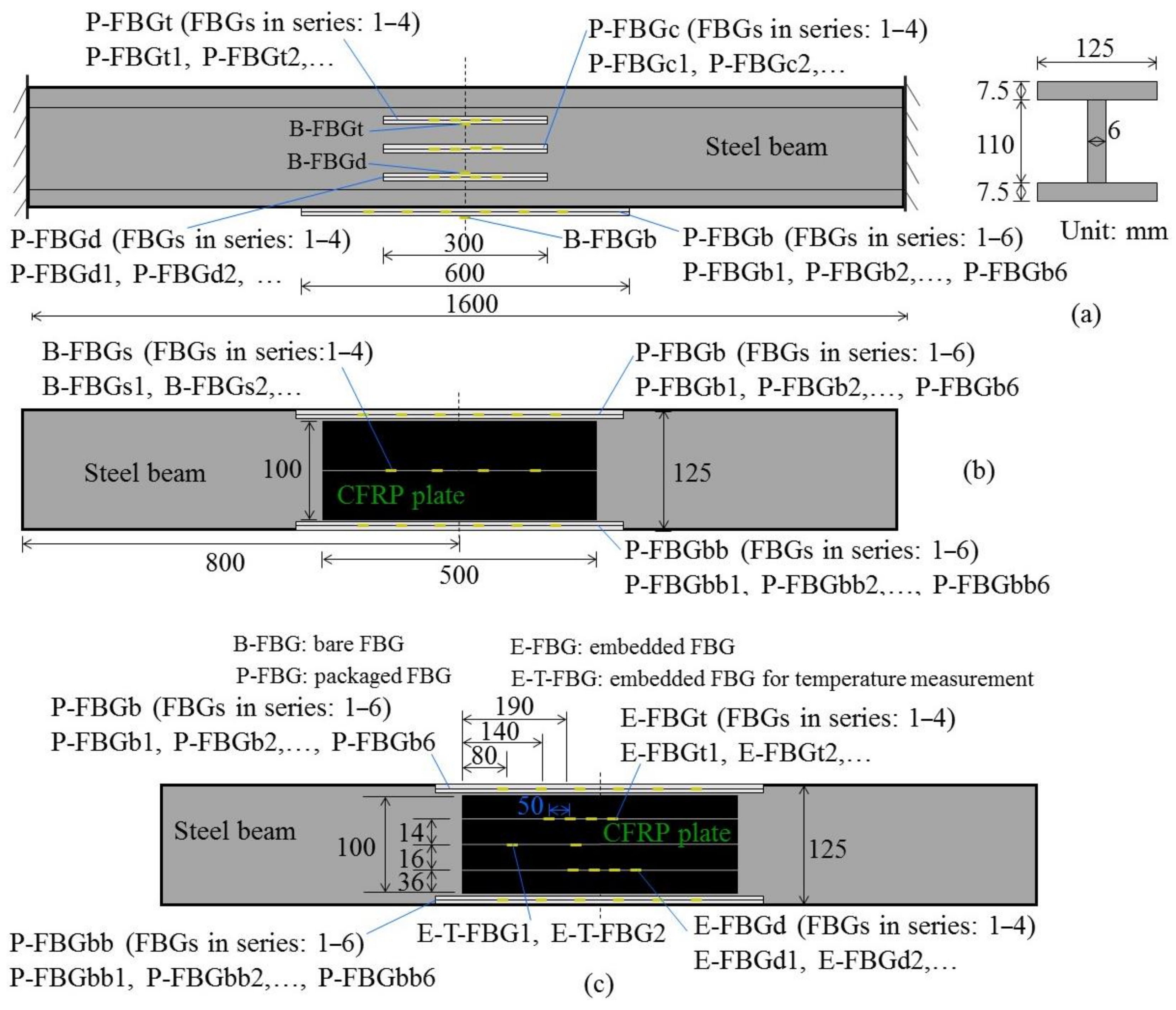
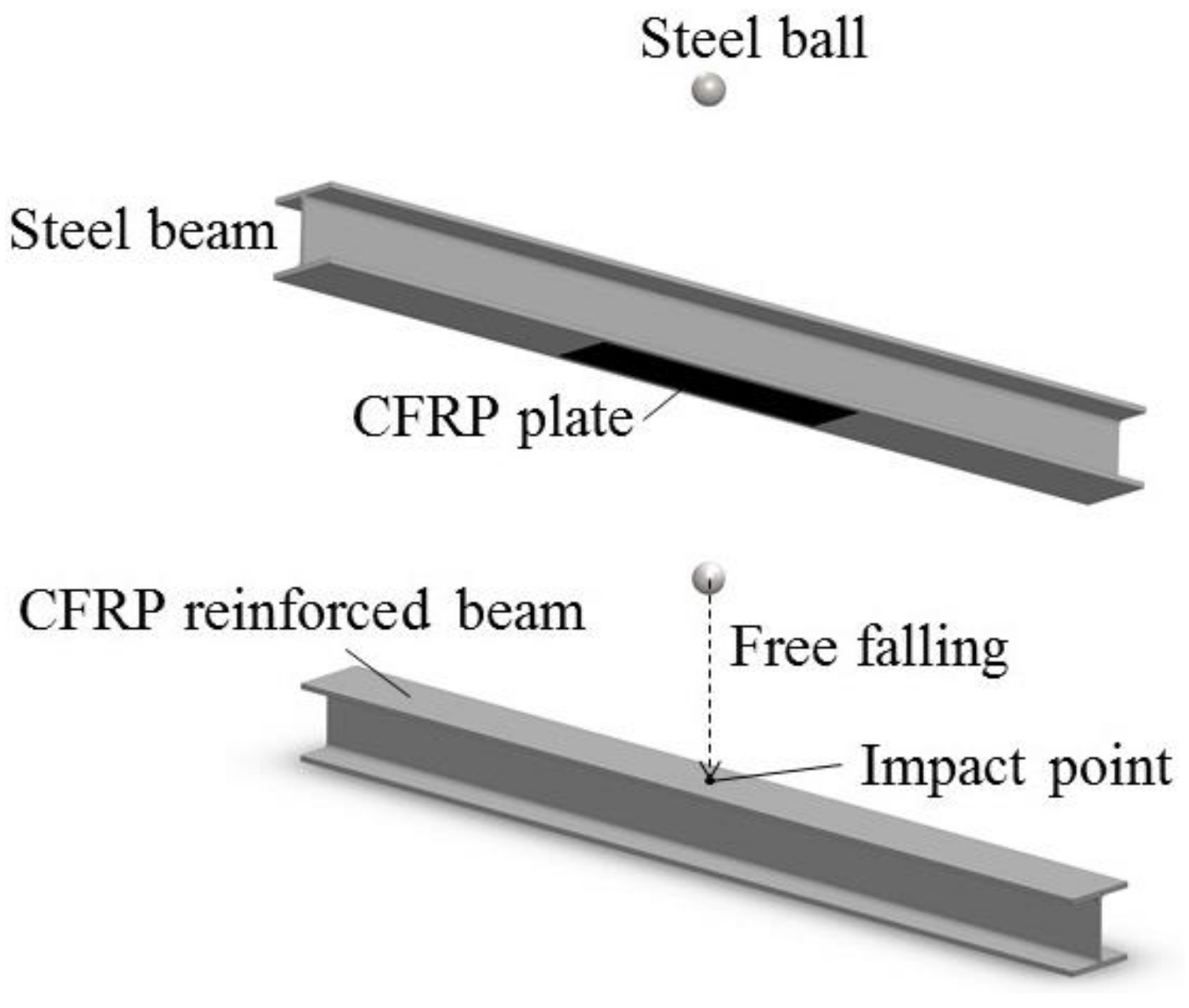
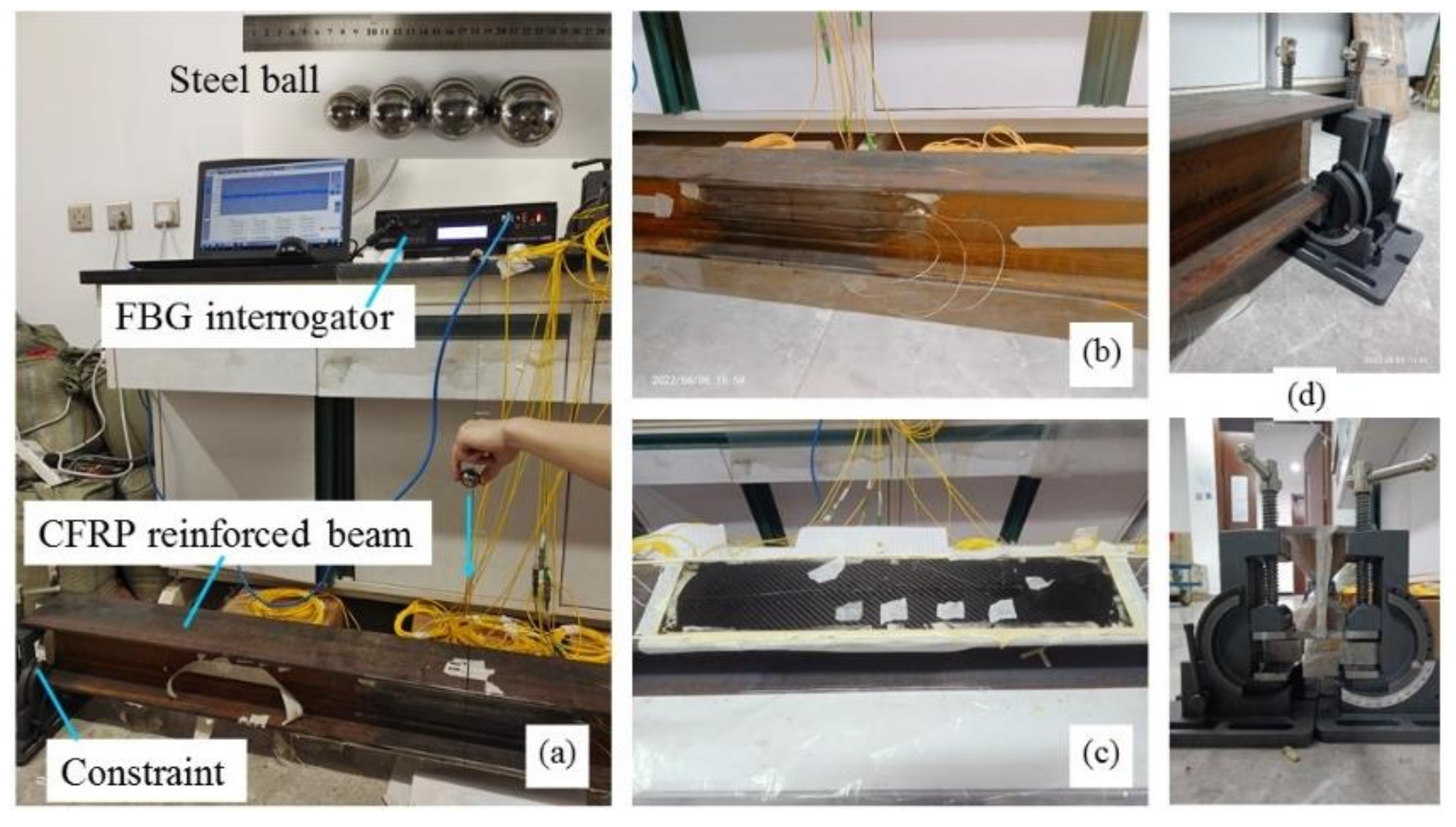
2. Experimental Model
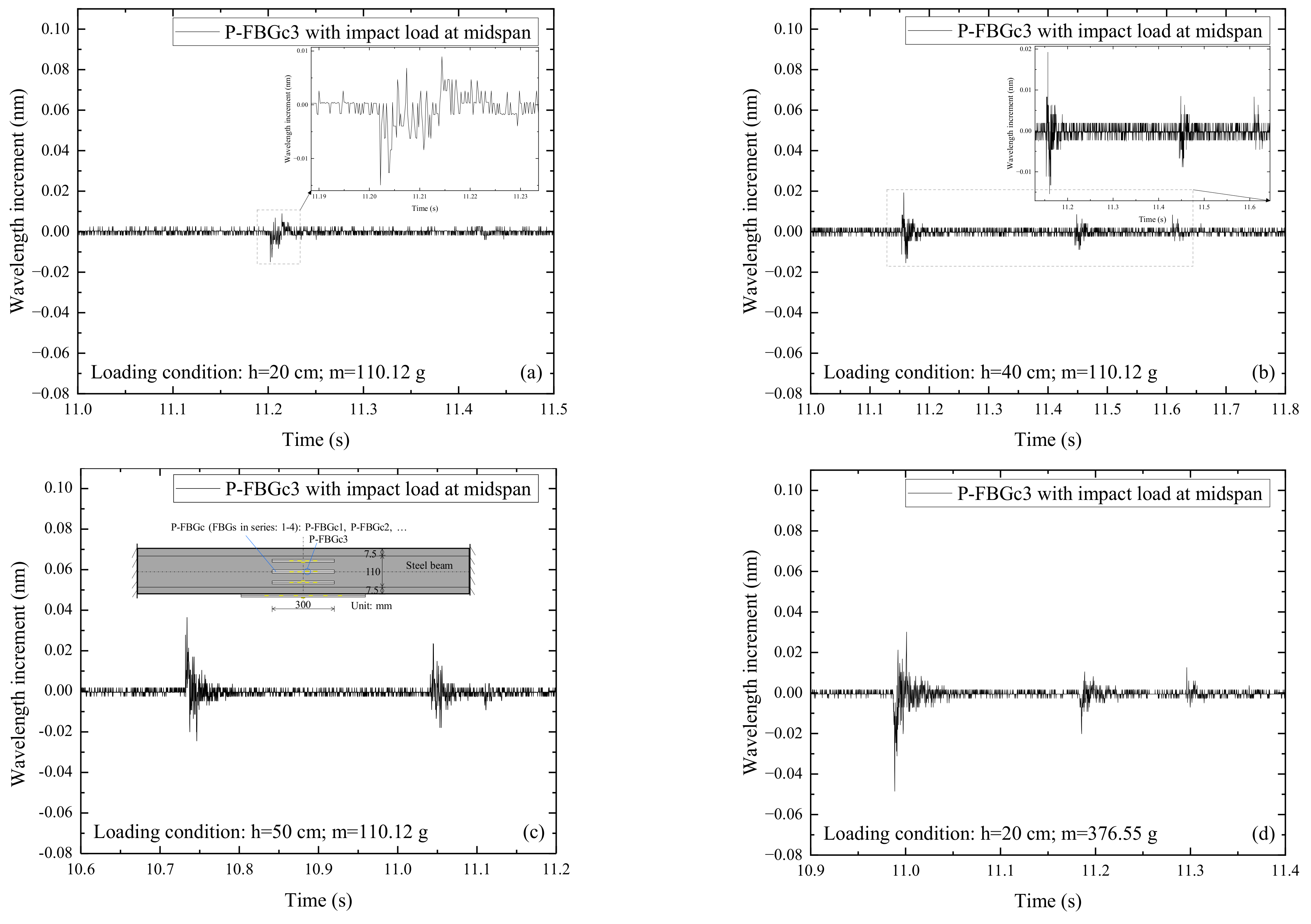
3. Time Domain Analysis
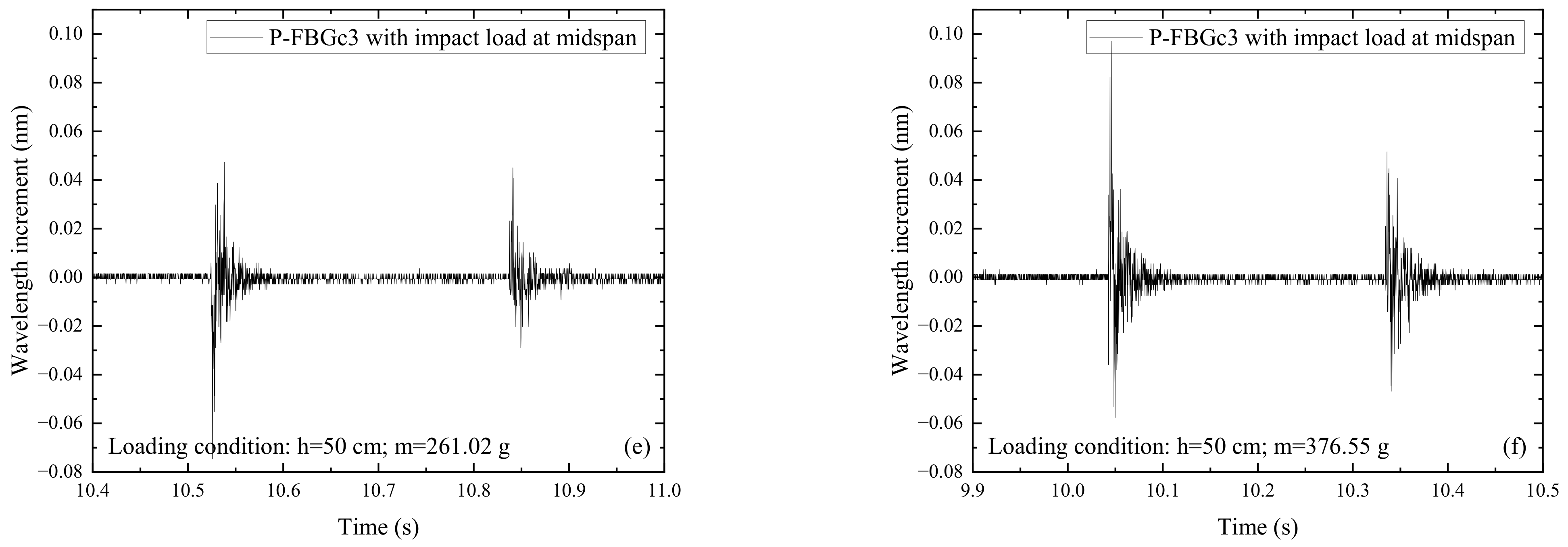
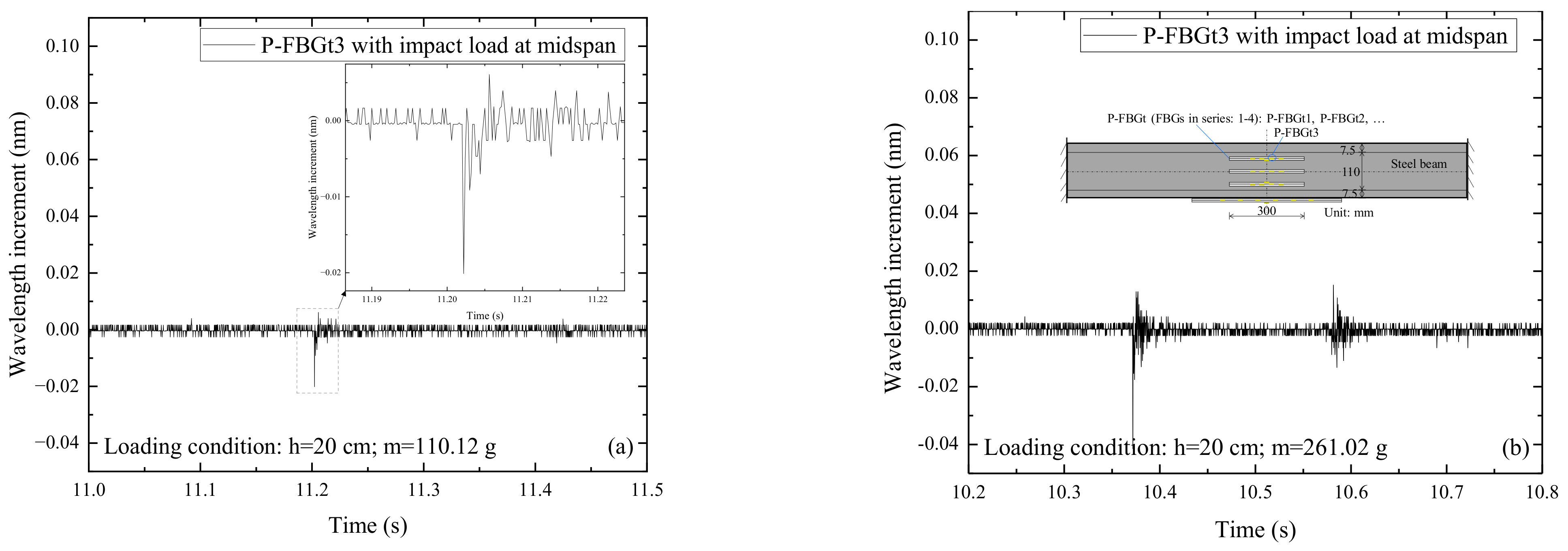
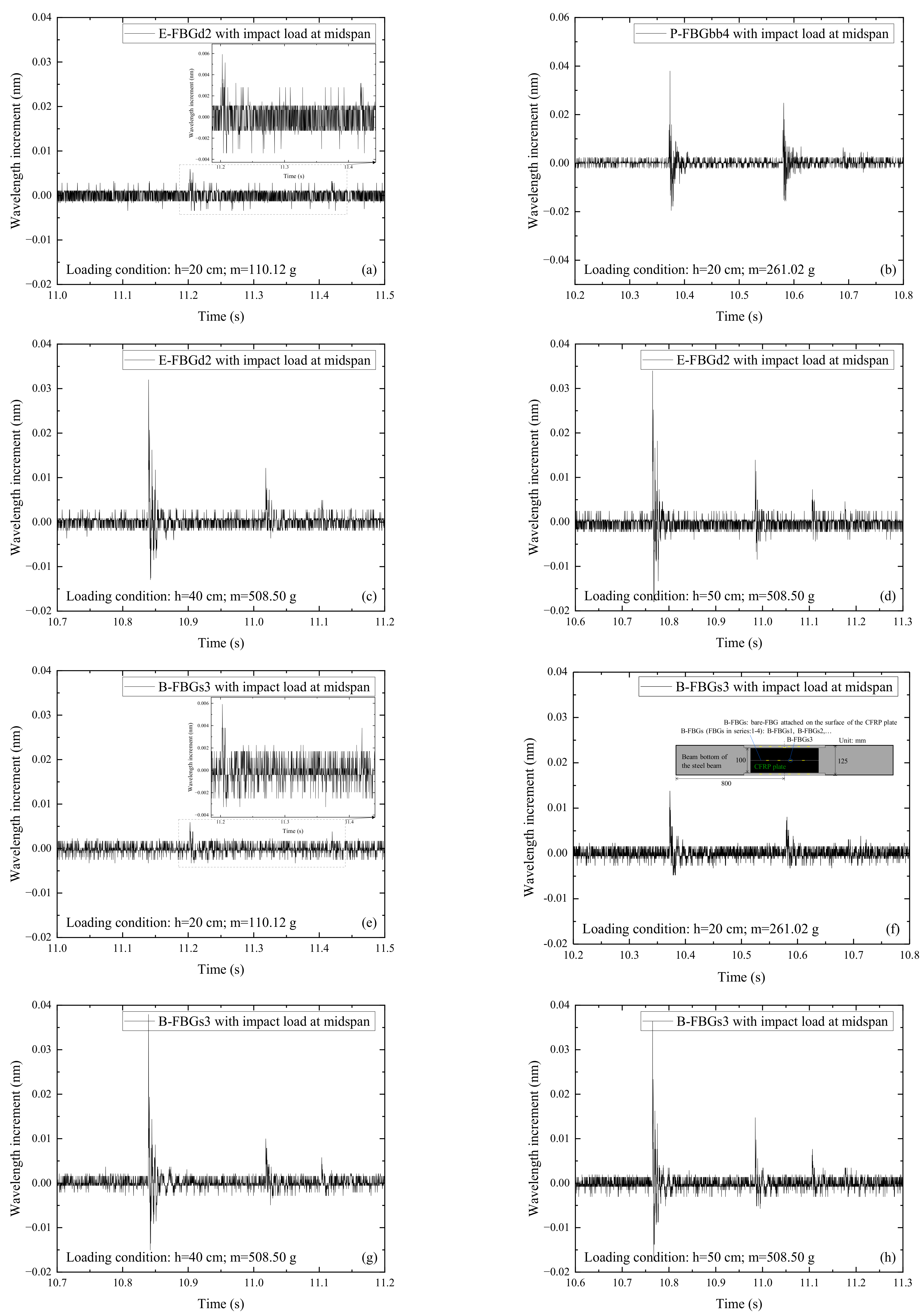
3.1. FBG Sensors Attached on the Web of the Beam
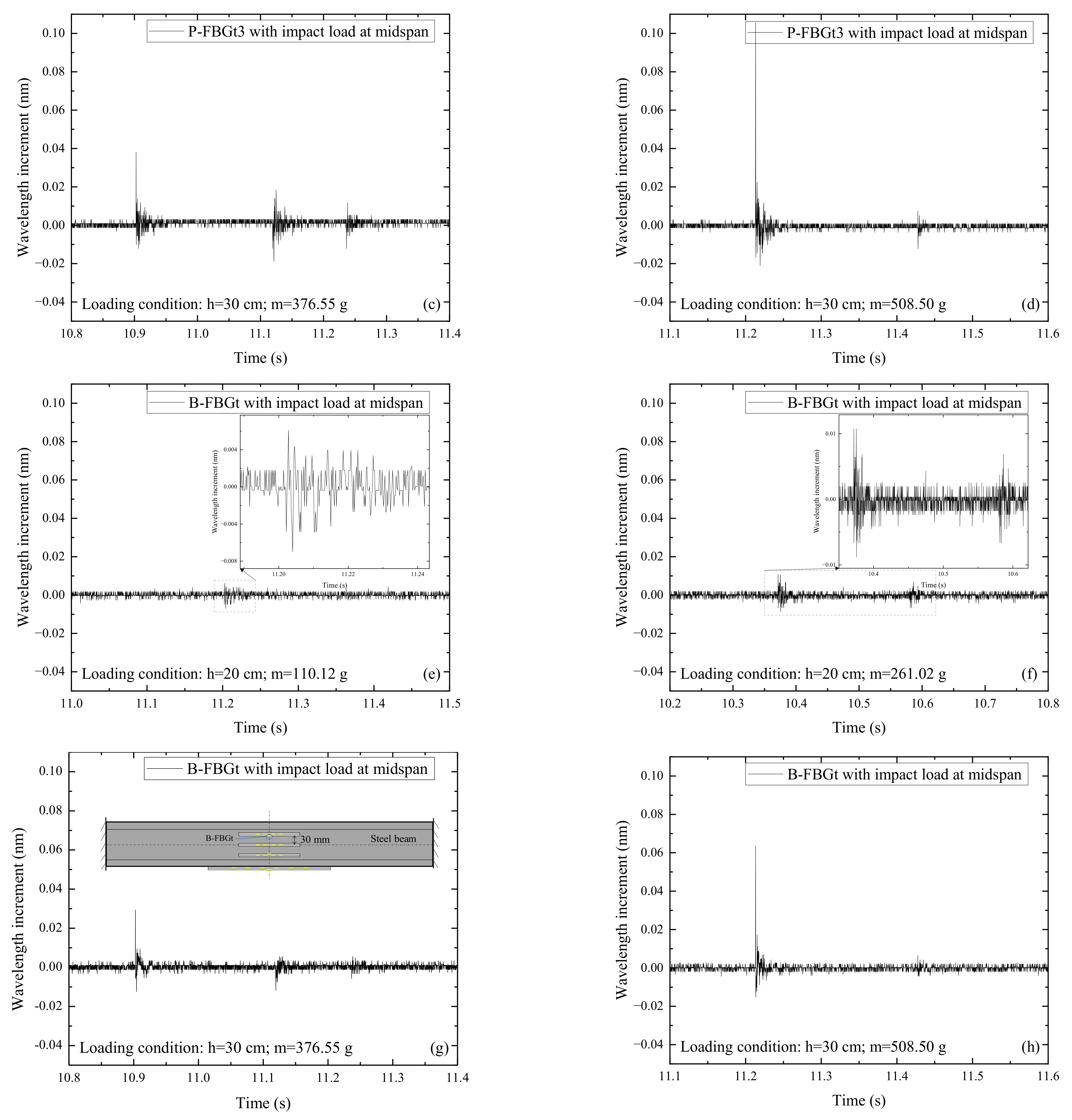
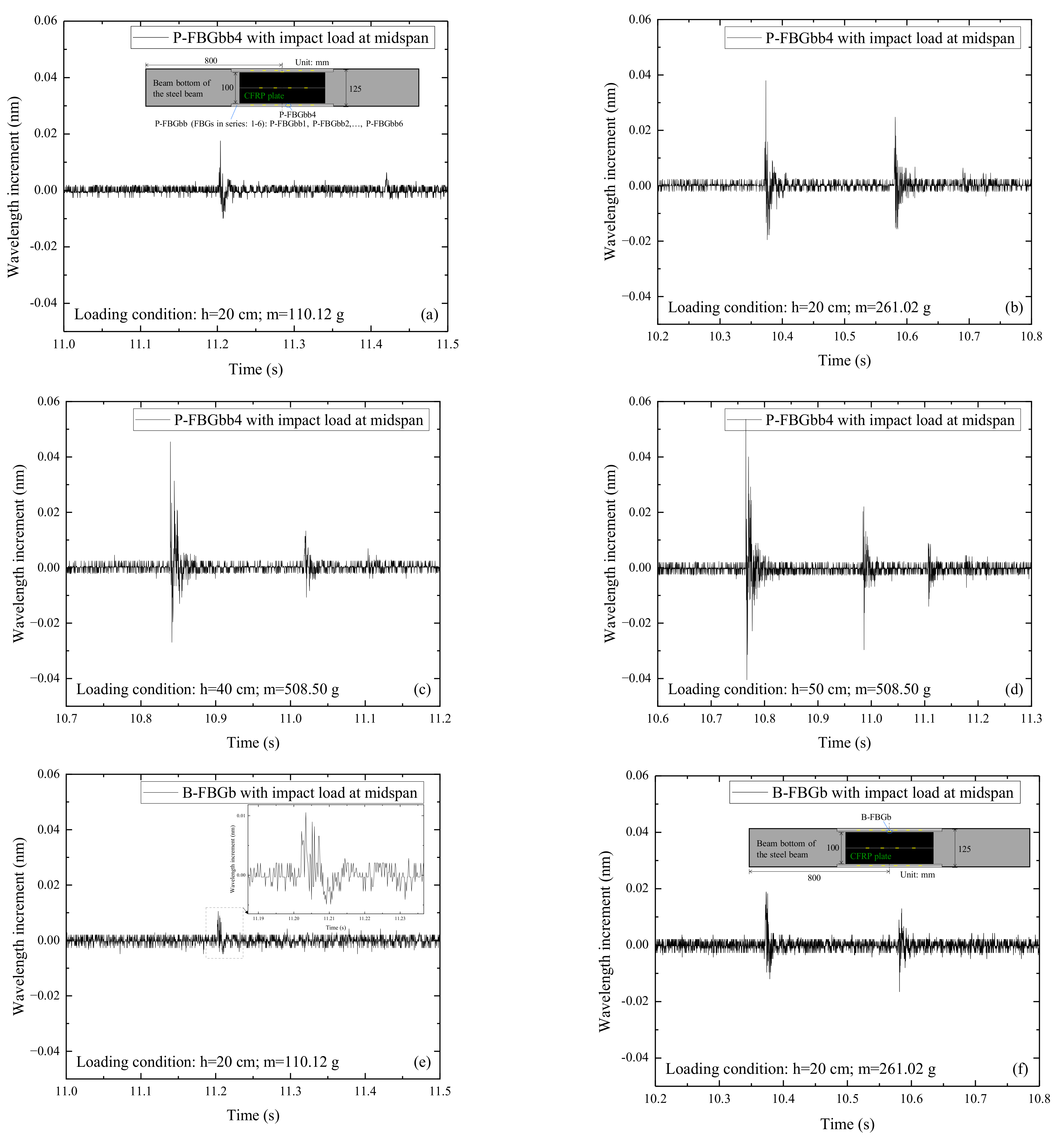
3.2. FBG Sensors Attached on the Beam Bottom of the Beam
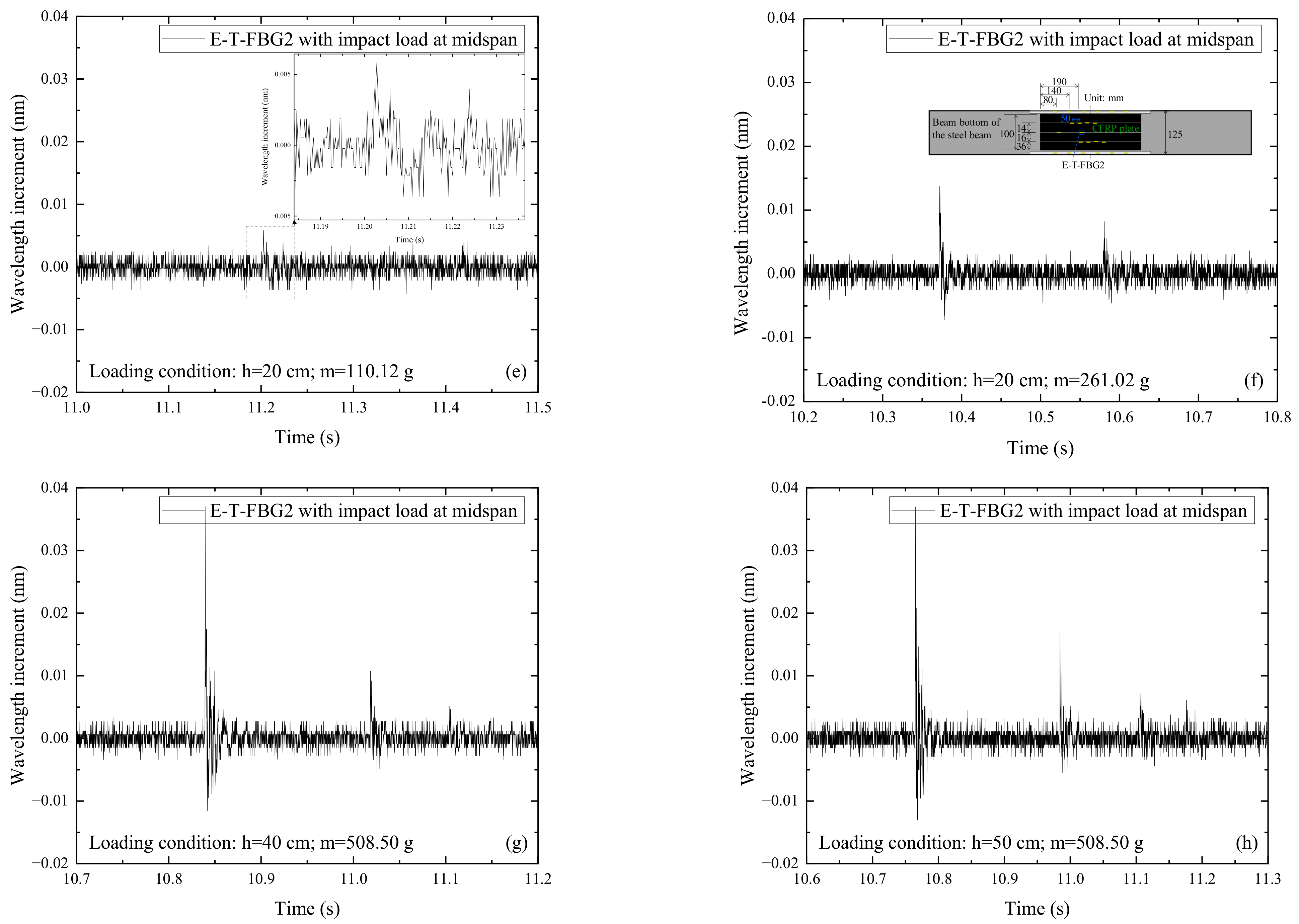
3.3. FBG Sensors Embedded in the CFRP Plate
4. Frequency Domain Analysis
4.1. FBG Sensors Attached on the Web of the Beam
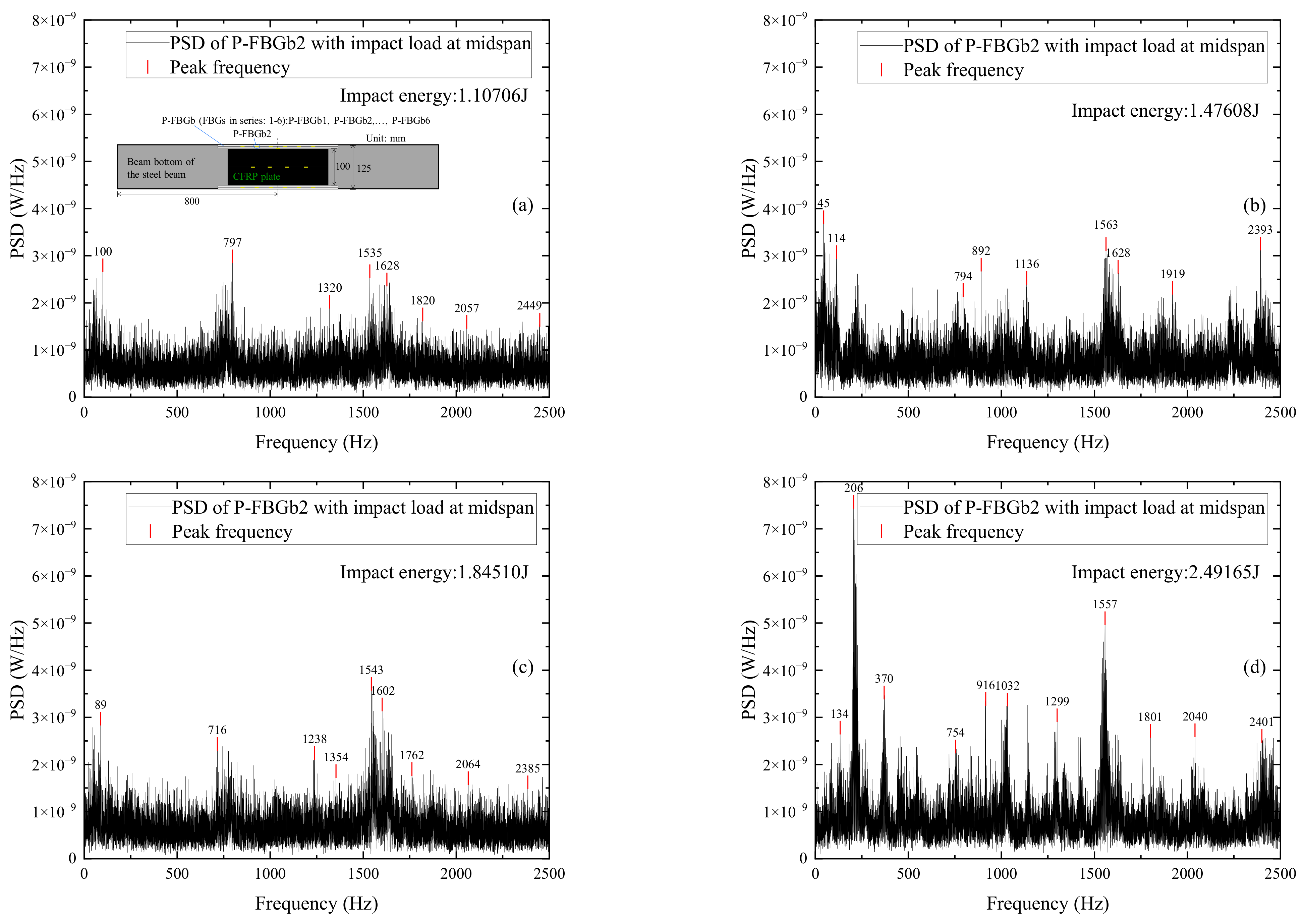
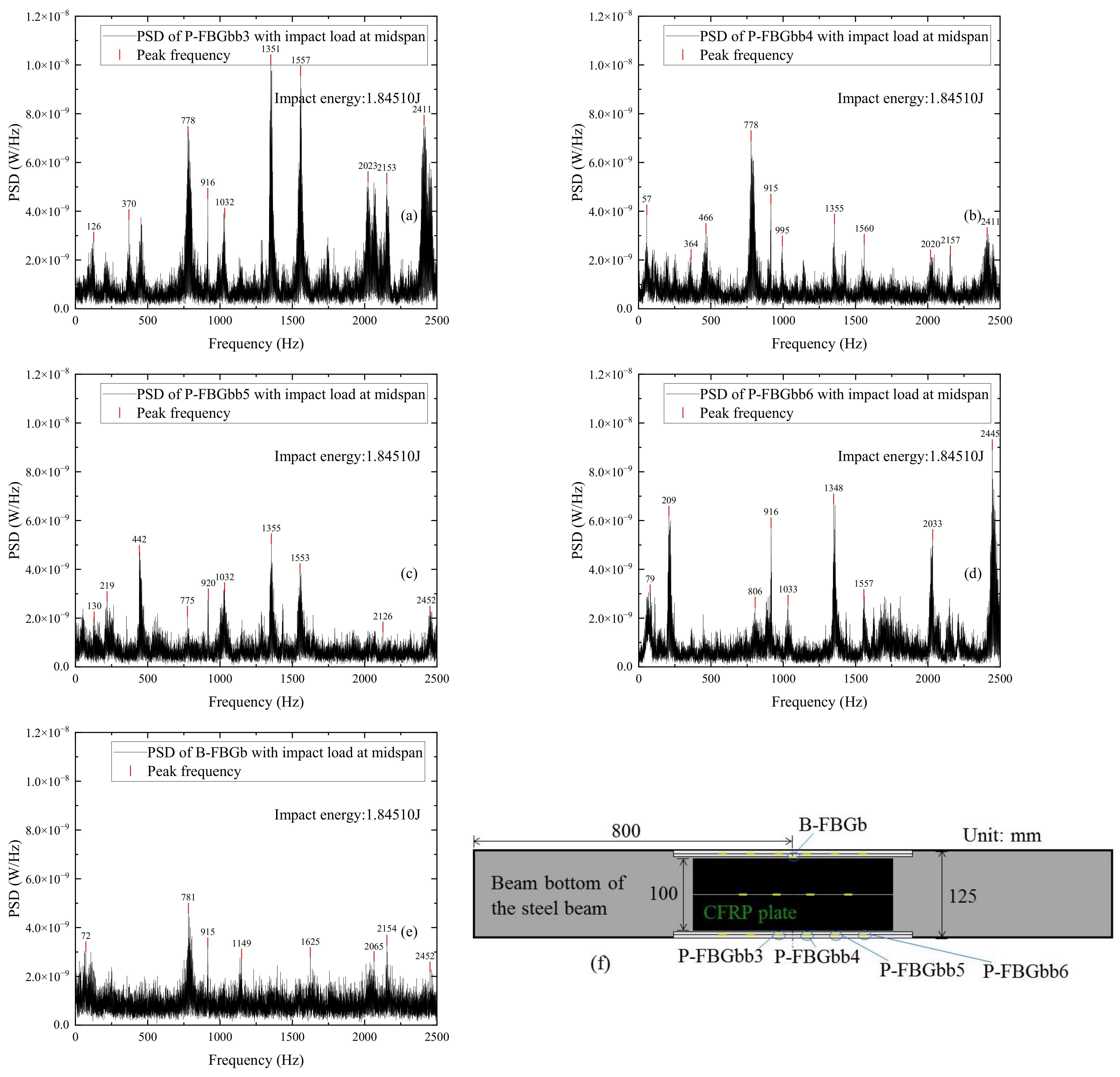
4.2. FBG Sensors Attached on the Beam Bottom of the Beam
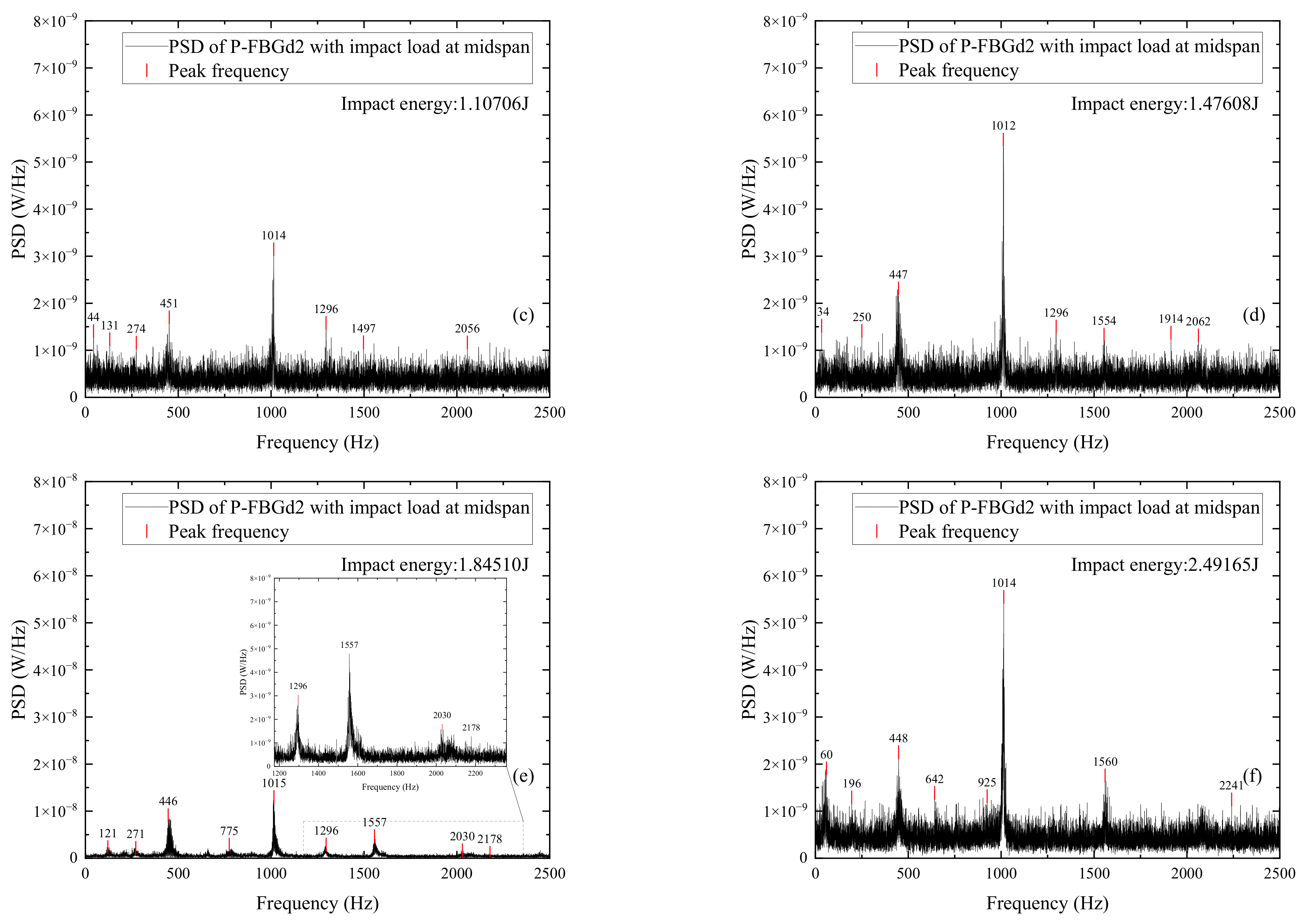
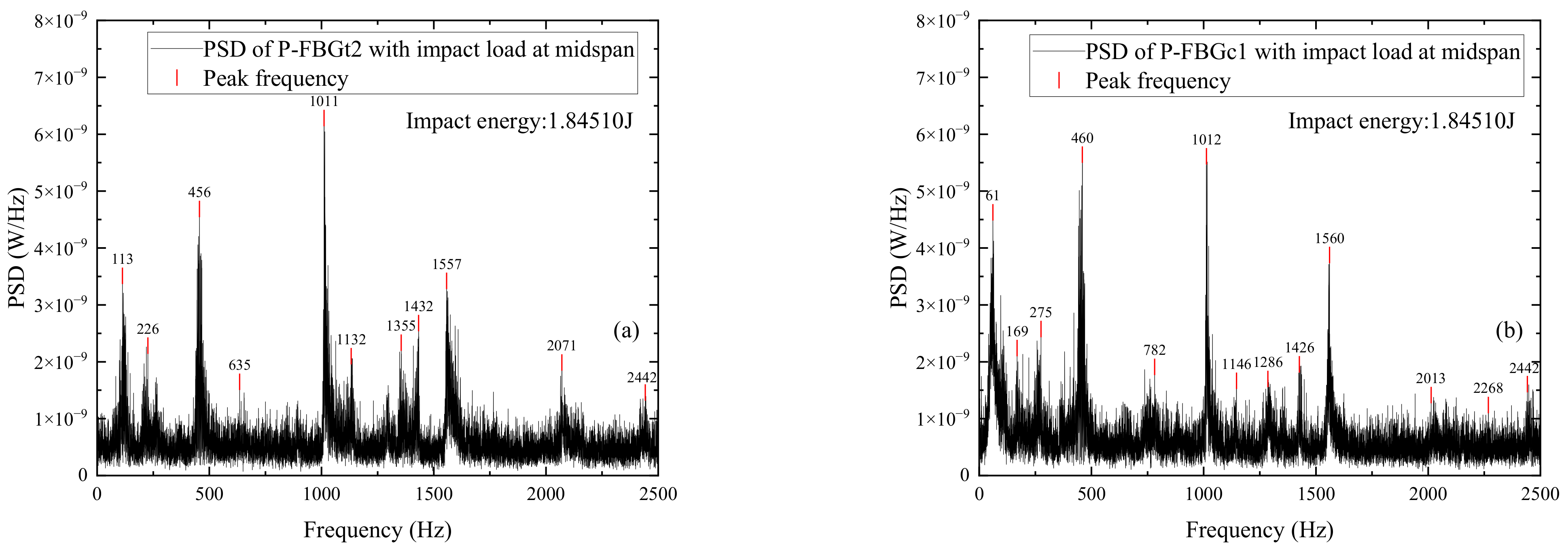
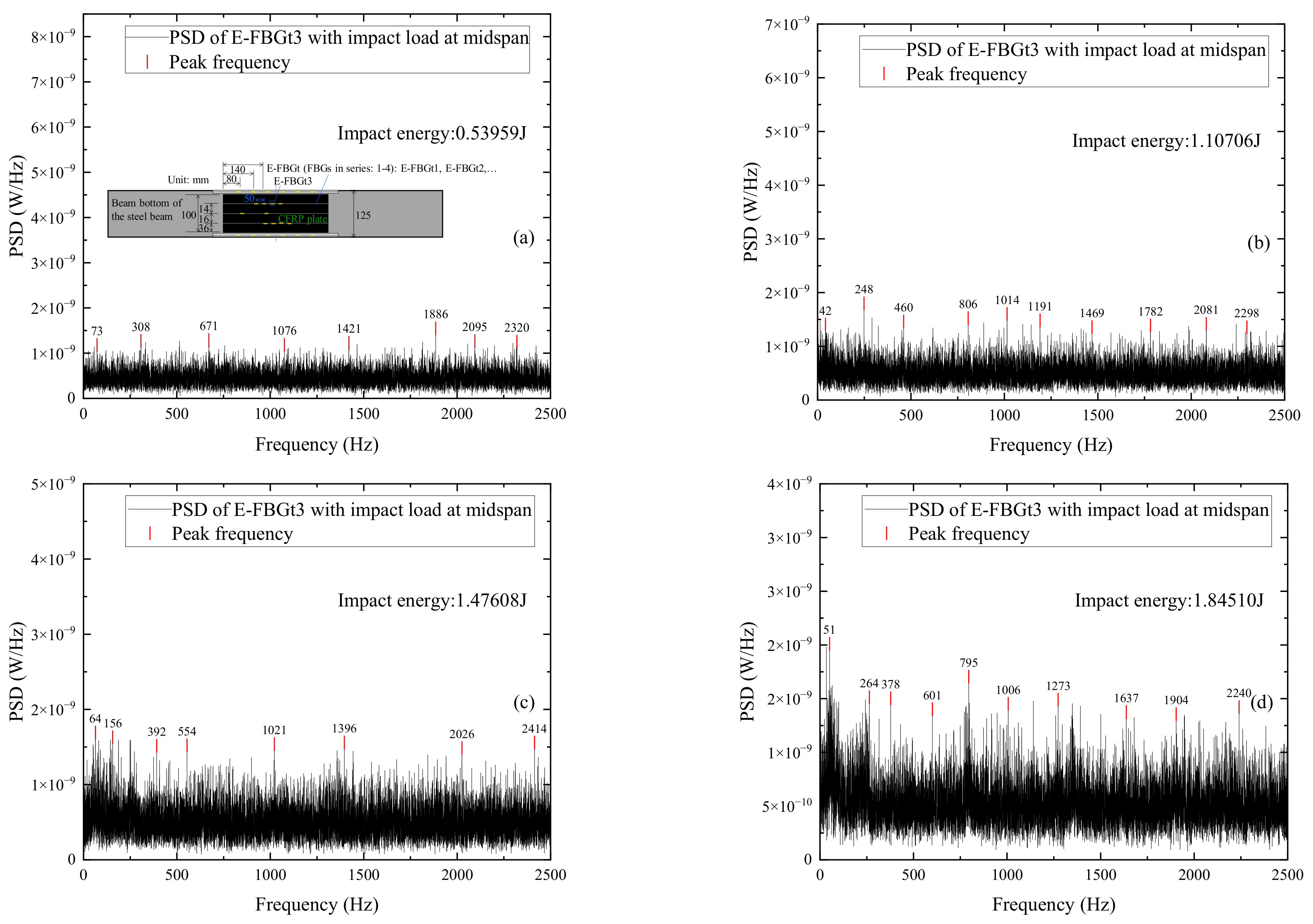
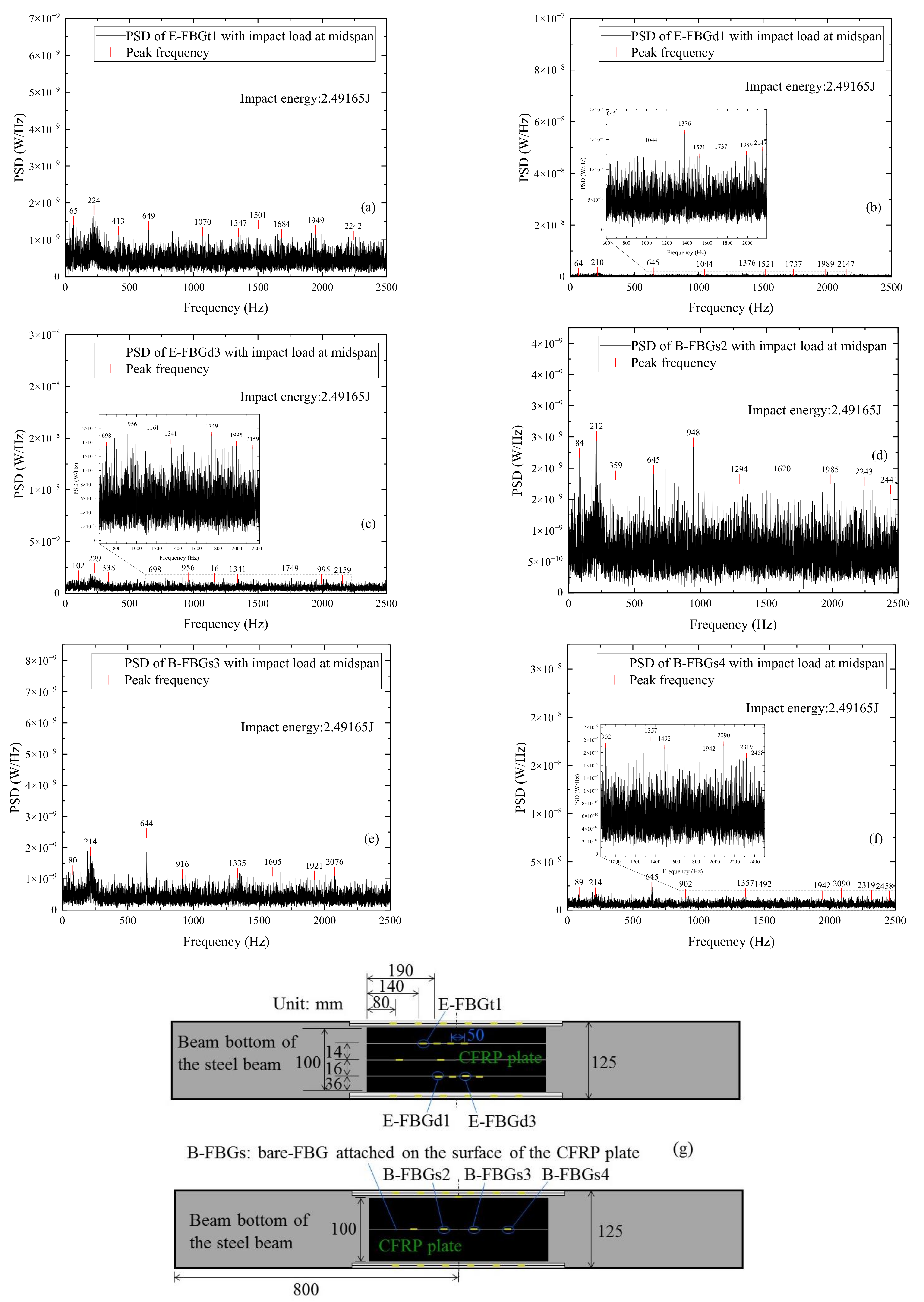
4.3. FBG Sensors Embedded in the CFRP Plate
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Saadatmanesh, H.; Malek, A.M. Design guidelines for flexural strengthening of RC beams with FRP plates. J. Compos. Constr. 1998, 2, 158–164. [Google Scholar] [CrossRef]
- Teng, J.G.; Yuan, H.; Chen, J.F. FRP-to-concrete interfaces between two adjacent cracks: Theoretical model for debonding failure. Int. J. Solids Struct. 2006, 43, 5750–5778. [Google Scholar] [CrossRef]
- Dai, J.G.; Gao, W.Y.; Teng, J.G. Bond-slip model for FRP laminates externally bonded to concrete at elevated temperature. J. Compos. Constr. 2013, 17, 217–228. [Google Scholar] [CrossRef]
- Tafsirojjaman, T.; Dogar, A.U.R.; Liu, Y.; Manalo, A.; Thambiratnam, D.P. Performance and design of steel structures reinforced with FRP composites: A state-of-the-art review. Eng. Fail. Anal. 2022, 138, 106371. [Google Scholar] [CrossRef]
- Zanardo, G.; Hao, H.; Xia, Y.; Deeks, A.J. Stiffness assessment through modal analysis of an RC slab bridge before and after strengthening. J. Bridge Eng. 2006, 11, 590–601. [Google Scholar] [CrossRef]
- Capozucca, R. Static and dynamic response of damaged RC beams strengthened with NSM CFRP rods. Compos. Struct. 2009, 91, 237–248. [Google Scholar] [CrossRef]
- Capozucca, R. Vibration of CFRP cantilever beam with damage. Compos. Struct. 2014, 116, 211–222. [Google Scholar] [CrossRef]
- Capozucca, R.; Blasi, M.G.; Corina, V. NSM technique: Bond of CFRP rods and static/dynamic response of strengthened RC beams. Compos. Struct. 2015, 127, 466–479. [Google Scholar] [CrossRef]
- Radnić, J.; Matešan, D.; Grgić, N.; Baloević, G. Impact testing of RC slabs strengthened with CFRP strips. Compos. Struct. 2015, 121, 90–103. [Google Scholar] [CrossRef]
- Prado, D.M.; Araujo, I.D.G.; Haach, V.G.; Carrazedo, R. Assessment of shear damaged and NSM CFRP retrofitted reinforced concrete beams based on modal analysis. Eng. Struct. 2016, 129, 54–66. [Google Scholar] [CrossRef]
- Liu, T.; Xiao, Y. Impact behavior of CFRP-strip–wrapped RC beams without stirrups. J. Compos. Constr. 2017, 21, 04017035. [Google Scholar] [CrossRef]
- Alam, M.I.; Fawzia, S.; Zhao, X.L.; Remennikov, A.M.; Bambach, M.R.; Elchalakani, M. Performance and dynamic behaviour of FRP strengthened CFST members subjected to lateral impact. Eng. Struct. 2017, 147, 160–176. [Google Scholar] [CrossRef]
- Salvetti, M.; Gilioli, A.; Sbarufatti, C.; Manes, A.; Giglio, M. Analytical model of the dynamic behaviour of CFRP plates subjected to low-velocity impacts. Compos. Part B Eng. 2018, 142, 47–55. [Google Scholar] [CrossRef]
- Li, G.; Tan, K.H.; Fung, T.C. Experimental study on CFRP-concrete dynamic debonding behavior. Eng. Struct. 2020, 206, 110055. [Google Scholar] [CrossRef]
- Gen, L.I.; Tan, K.H.; Fung, T.C. A Rate-dependent Continuum Damage Model for Dynamic Shear Debonding of CFRP-concrete Interface. Int. J. Impact Eng. 2021, 152, 103844. [Google Scholar]
- Liu, W.; Yu, Y.; Zhang, Z.; Liu, C.; Tong, Y. Impact resistance of CFRP-reinforced wood beams under axial force using a digital image correlation method. Compos. Struct. 2021, 261, 113276. [Google Scholar] [CrossRef]
- Ou, J.P.; Li, H. Structural health monitoring in mainland China: Review and future trends. Struct. Health Monit.-Int. J. 2010, 9, 219–231. [Google Scholar]
- Wang, H.P.; Ni, Y.Q.; Dai, J.G.; Yuan, M.D. Interfacial debonding detection of strengthened steel structures by using smart CFRP-FBG composites. Smart Mater. Struct. 2019, 28, 115001. [Google Scholar] [CrossRef]
- Ansari, F. Practical implementation of optical fiber sensors in civil structural health monitoring. J. Intell. Mater. Syst. Struct. 2007, 18, 879–889. [Google Scholar] [CrossRef]
- Wang, H.P.; Xiang, P.; Li, X. Theoretical analysis on strain transfer error of FBG sensors attached on steel structures subjected to fatigue load. Strain 2016, 52, 522–530. [Google Scholar] [CrossRef]
- Wang, H.P.; Jiang, L.Z.; Xiang, P. Improving the durability of the optical fiber sensor based on strain transfer analysis. Opt. Fiber Technol. 2018, 42, 97–104. [Google Scholar] [CrossRef]
- Degala, S.; Rizzo, P.; Ramanathan, K.; Harries, K.A. Acoustic emission monitoring of CFRP reinforced concrete slabs. Constr. Build. Mater. 2009, 23, 2016–2026. [Google Scholar] [CrossRef]
- Wang, H.P.; Jiang, L.Z.; Xiang, P. Priority design parameters of industrialized optical fiber sensors in civil engineering. Opt. Laser Technol. 2018, 100, 119–128. [Google Scholar] [CrossRef]
- Wang, H.P.; Dai, J.G. Strain transfer analysis of fiber Bragg grating sensor assembled composite structures subjected to thermal loading. Compos. Part B Eng. 2019, 162, 303–313. [Google Scholar] [CrossRef]
- Li, Y.; Liu, W.; Feng, Y.; Zhang, H. Ultrasonic embedding of nickel-coated fiber Bragg grating in aluminum and associated sensing characteristics. Opt. Fiber Technol. 2012, 18, 7–13. [Google Scholar] [CrossRef]
- Wang, H.P.; Xiang, P.; Jiang, L.Z. Strain transfer theory of industrialized optical fiber-based sensors in civil engineering: A review on measurement accuracy, design and calibration. Sens. Actuators A Phys. 2019, 285, 414–426. [Google Scholar] [CrossRef]
- Wang, H.P.; Dai, J.G.; Wang, X.Z. Improved temperature compensation of fiber Bragg grating-based sensors applied to structures under different loading conditions. Opt. Fiber Technol. 2021, 63, 102506. [Google Scholar] [CrossRef]
- Kim, S.W.; Kim, E.H.; Jeong, M.S.; Lee, I. Damage evaluation and strain monitoring for composite cylinders using tin-coated FBG sensors under low-velocity impacts. Compos. Part B Eng. 2015, 74, 13–22. [Google Scholar] [CrossRef]
- Ku, H.; Wang, H.; Pattarachaiyakoop, N.; Trada, M. A review on the tensile properties of natural fibre reinforced polymer composites. Compos. Part B Eng. 2011, 42, 856–873. [Google Scholar] [CrossRef]
- Wu, D. Analysis of Signals and Linear Systems, 4th ed.; Higher Education Press: Beijing, China, 2005. [Google Scholar]
- Jang, B.W.; Kim, C.G. Real-time detection of low-velocity impact-induced delamination onset in composite laminates for efficient management of structural health. Compos. Part B Eng. 2017, 123, 124–135. [Google Scholar] [CrossRef]
- Calderón, P.A.; Glisic, B. Influence of mechanical and geometrical properties of embedded long-gauge strain sensors on the accuracy of strain measurement. Meas. Sci. Technol. 2012, 23, 065604. [Google Scholar] [CrossRef]
- Murayama, H.; Kageyama, K.; Naruse, H.; Shimada, A.; Uzawa, K. Application of fiber optic distributed sensors to health monitoring for full-scale composite structures. J. Intell. Mater. Syst. Struct. 2003, 14, 3–11. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Weight of Steel Ball (g) | Height of Impact Action (cm) | Impact Energy (J) |
|---|---|---|---|
| Case 1 | 110.12 | 20 | 0.21584 |
| Case 2 | 261.02 | 20 | 0.51160 |
| Case 3 | 376.55 | 20 | 0.73804 |
| Case 4 | 508.5 | 20 | 0.99666 |
| Case 5 | 110.12 | 30 | 0.32375 |
| Case 6 | 261.02 | 30 | 0.76740 |
| Case 7 | 376.55 | 30 | 1.10706 |
| Case 8 | 508.5 | 30 | 1.49499 |
| Case 9 | 110.12 | 40 | 0.43167 |
| Case 10 | 261.02 | 40 | 1.02320 |
| Case 11 | 376.55 | 40 | 1.47608 |
| Case 12 | 508.5 | 40 | 1.99332 |
| Case 13 | 110.12 | 50 | 0.53959 |
| Case 14 | 261.02 | 50 | 1.27900 |
| Case 15 | 376.55 | 50 | 1.84510 |
| Case 16 | 508.5 | 50 | 2.49165 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, H.-P.; Wu, Y.-B.; Chen, C.; Zhang, H.-Y.; Jiang, H.; Zhang, X.-M.; Xu, X.-Y. Dynamic Response of CFRP Reinforced Steel Beams Subjected to Impact Action Based on FBG Sensing Technology. Sensors 2022, 22, 6377. https://doi.org/10.3390/s22176377
Wang H-P, Wu Y-B, Chen C, Zhang H-Y, Jiang H, Zhang X-M, Xu X-Y. Dynamic Response of CFRP Reinforced Steel Beams Subjected to Impact Action Based on FBG Sensing Technology. Sensors. 2022; 22(17):6377. https://doi.org/10.3390/s22176377
Chicago/Turabian StyleWang, Hua-Ping, Yi-Bin Wu, Cong Chen, Hu-Yuan Zhang, Hao Jiang, Xue-Mei Zhang, and Xiang-Yang Xu. 2022. "Dynamic Response of CFRP Reinforced Steel Beams Subjected to Impact Action Based on FBG Sensing Technology" Sensors 22, no. 17: 6377. https://doi.org/10.3390/s22176377